執行器故障下的運載火箭非奇異終端滑模容錯控制
2021-01-12 13:55:16馬艷如胡昌華周志杰梁小輝
宇航學報 2020年12期
馬艷如,王 青,胡昌華,周志杰,梁小輝
(1. 北京航空航天大學自動化科學與電氣工程學院,北京 100191;2. 火箭軍工程大學導彈工程學院,西安 710025)
0 引 言
近年來,隨著航空航天技術的發展,運載火箭成為人類進入太空的重要工具,承擔任務種類愈加復雜,承載載荷愈發多樣[1]。例如,中國的長征系列運載火箭和美國NASA的Ares系列運載火箭、美國太空探索技術公司(SpaceX)獵鷹系列運載火箭等[2],承擔發射不同地球軌道衛星和載人飛船的任務。發射任務一旦失敗,不僅會帶來巨大的經濟損失,還會影響其戰略、軍事、外交等[3]。然而,運載火箭發射失敗的主要原因是控制精度不夠和機械故障等。因此,在如此耗資巨大和復雜的系統中,提高系統的控制精度和在故障下仍能保持良好的控制性能顯得尤為重要。滑模控制因其對外界干擾和不確定參數具有強魯棒性、快速全局收斂特性和對建模誤差不敏感等特性。廣泛應用于機器人控制、化工控制和航空航天等領域[4-6]。傳統滑模控制采用線性滑模面,不具備有限時間收斂特性[7],而非奇異終端滑模控制不但能實現有限時間收斂,而且改進了傳統的終端滑模控制存在控制輸入趨于無窮大的問題,成為當前研究熱點,并取得了一定成果。
非奇異終端滑模控制方法在航天器控制方面取得了許多成果[8-12]。文獻[8-12]考慮模型不確定性和外部干擾的情況對控制器進行設計;不同之處在于文獻[8]構造了固定時間擴張狀態觀測器,用于估計外部干擾和不確定狀態的總擾動,設計了一種新的非奇異快速終端滑模面,并根據總擾動的估計和提出的滑模面設計了相應的固定時間控制器。文獻[9]重點解決具有未知邊界擾動的撓性航天器有限時間姿態控制問題。文獻[10]針對航天器姿態跟蹤控制問題提出一種復合控制器。該控制器由非奇異終端滑模法的反饋控制和基于有限時間擾動觀測器的補償項組成。文獻[11]設計了非奇異快速終端滑模動態輸出反饋控制器,僅利用角速度和角度信息實現有限時間快速姿態穩定。文獻[12]在反步法中最后一步設計了終端滑模控制法,以保證有限時間收斂。眾多文獻[13-15]對更為復雜的模型控制問題作了研究。文獻[13]針對存在模型不確定性的再入飛行器提出了基于神經網絡的固定時間終端滑模控制律,引入飽和函數以避免奇異性問題。自適應神經網絡用于估計飛行器的不確定性,從而在不犧牲魯棒性的情況下減輕了顫動。文獻[14]基于非奇異終端滑模技術和徑向基神經網絡設計了航天器編隊飛行多目標姿態跟蹤魯棒控制器。魯棒控制器由徑向基神經網絡和自適應控制器組成,并根據非奇異終端滑模有限時間收斂特性,提出了一種徑向基網絡在線學習算法,提高其逼近效率。文獻[15]將非奇異終端滑模控制與自適應方法相結合,自適應更新律用于估計各種不確定性的邊界。
與上述方法不同,本文提出了一種新型非奇異終端滑模控制設計方法,將應用于單輸入單輸出(SISO)系統的終端滑模方法[16]擴展到多輸入多輸出(MIMO)非線性系統,且考慮系統在執行器卡死故障下的控制。首先,本文針對存在執行器卡死故障的運載火箭姿態跟蹤系統設計了一種新型終端滑模面,基于李雅普諾夫函數證明系統能在有限時間到達滑模面。而對于奇異問題,本文修改了奇異區域的控制律。當閉環系統到達滑模面后,原點是該系統的全局漸近穩定點。能較快實現運載火箭姿態跟蹤系統的控制。
本文對存在執行器卡死故障的運載火箭姿態控制跟蹤問題進行研究。首先對運載火箭姿態控制系統進行動力學建模;在此基礎上考慮未知干擾和執行器故障建立系統模型,執行器故障主要考慮執行機構卡死故障,將干擾和執行器故障視為廣義干擾,并將系統轉換為一種多輸入多輸出系統,該系統為三個獨立的二階單輸入單輸出微分方程。利用非奇異終端滑模控制技術,實現了故障下的運載火箭姿態角非線性跟蹤控制,同時保證運載火箭的控制精度。
1 系統動力學模型

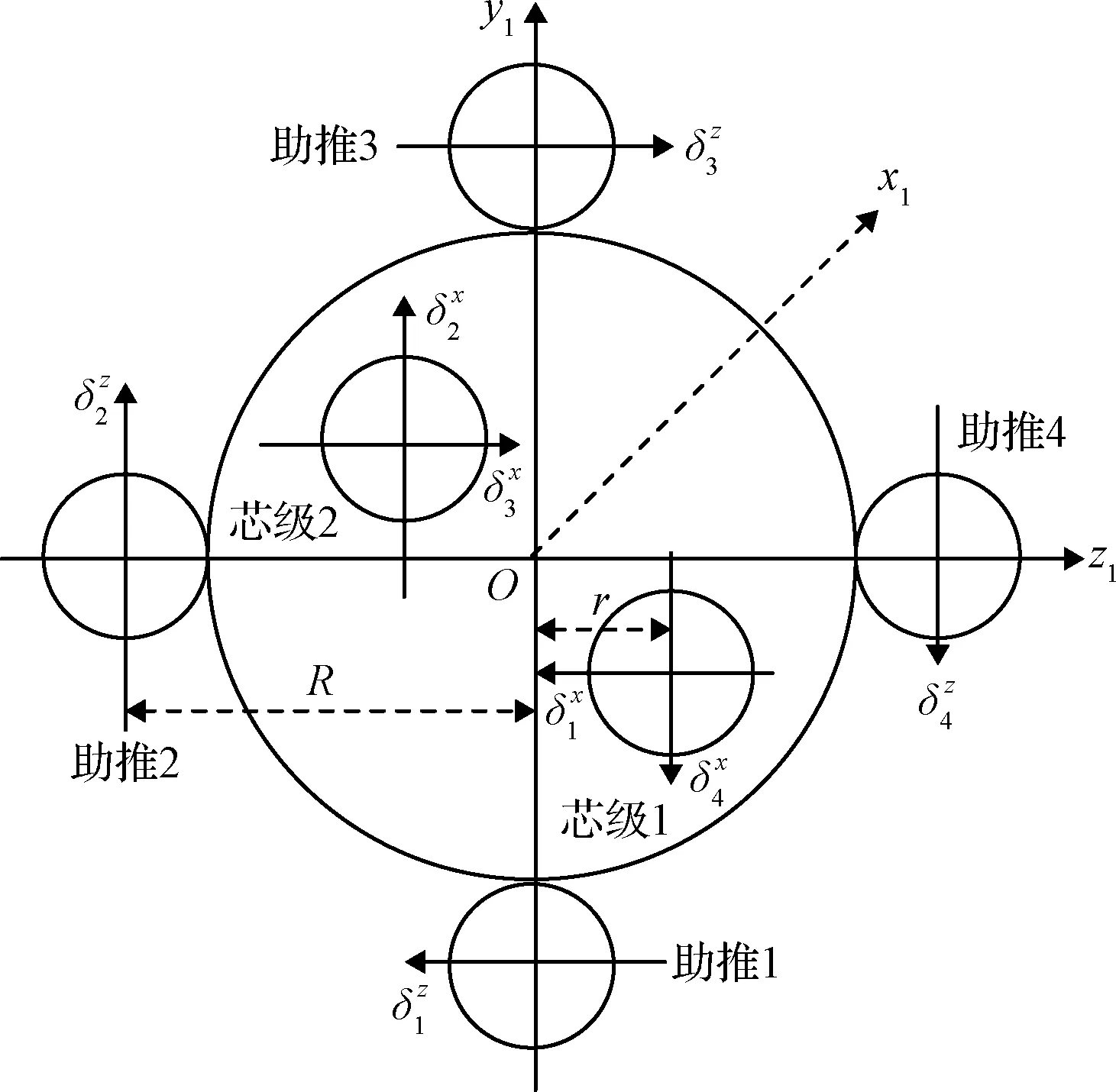
圖1 運載火箭發動機布局尾視圖
(1)
(2a)
(2b)
對于某大型運載火箭,忽略彈性模態,并將燃油晃動和氣動力矩考慮到干擾中,建立其旋轉運動模型:
(3)
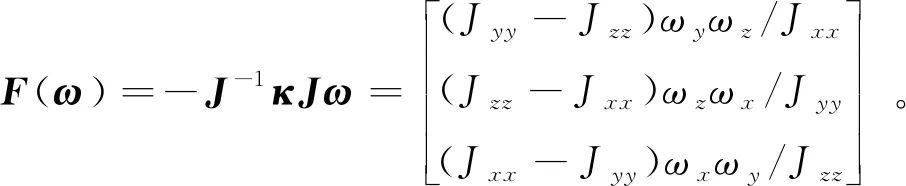
式中:J=diag(Jxx,Jyy,Jzz)∈R3×3為運載火箭的轉動慣量矩陣;ω=[ωx,ωy,ωz]T為角速度;矩陣κ定義為:
(4)
式中:u為控制輸入向量;ufault為執行器故障輸入矩陣;D=[Dx,Dy,Dz]T為干擾向量。
式(3)中的控制輸入力矩u由6個發動機擺動產生。其中,控制力矩為:
(5)
式中:R=3 m和r=1 m分別為助推發動機中心和芯級發動機中心到運載火箭箭體x軸的距離。XR為發動機噴嘴到火箭頂端的距離;XZ為質心位置;P為每個發動機的推力。將式(1)代入式(5),可得:
u=Bδ
(6)
式中:B為輸入矩陣,其中

(7)
C=Pdiag(-4R,-2(XR-XZ),-2(XR-XZ))。
根據慣性坐標系與機體坐標系之間的關系,可以得到運載火箭姿態運動方程為:

(8)
式中:Ω=[φ,φ,θ]T,φ為滾轉角,φ為偏航角,θ為俯仰角。其中,Z(Ω)的定義為:
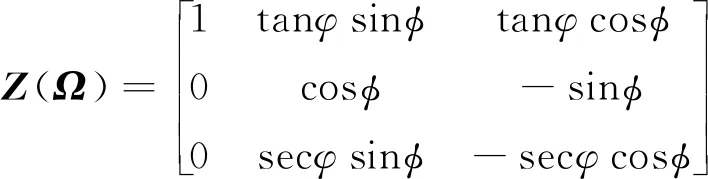
(9)
根據式(1)~(9),建立運載火箭動力學模型:
(10)
式(10)中的第一項對時間微分,可得:

(11)
由式(10)可得:
(12)

(13)
式中:f(x)∈R3,G(x)∈R3×3,d∈R3。其中,上述三項的定義為:
(14)
令xr為運載火箭姿態角參考信號,即xr=[φr,φr,θr]T,φr,φr,θr分別為滾轉角、偏航角和俯仰角參考信號。定義系統誤差信號:
(15)
為簡化閉環跟蹤控制系統問題,給出下述假設條件。
假設1[17]. 在任意t>0時刻,令λ=(ufault+D),并定義λ′=[|λ1|, |λ2|, |λ3|]T,且廣義干擾λ′均有上屆λup,其中λup∈R3,定義λ′≤λup,即|λi|<λiup,i=1,2,3。
假設2[16]. 控制輸入向量δ(t)∈L2空間,即δ(t)在任何有限時間內的積分均有界。
假設3[17]. 姿態角指令參考信號xr和其前二階導數均可得到且有界。
本文的控制目標為設計控制器δ(t)使得滿足上述假設條件的運載火箭姿態系統(10)能在有限時間跟蹤到期望值,并且有良好的控制精度,即:
(16)
2 非奇異終端滑模控制器設計
(17)
對于式(17)所描述的系統,本文設計了一種非奇異終端滑模控制器,實現對火箭姿態角的快速跟蹤。首先介紹本文在設計控制器時所用到的引理。
設計如下終端滑模面:
s=v2+c1v1+c2sigβ(v1)
(18)
式中:s=[s1,s2,s3]T∈R3,0<β<1。其中定義c1v1=c1[v11,v12,v13]T,且c1,c2滿足c1,c2>0,sigβ(v1)=[sigβ(v11), sigβ(v12), sigβ(v13)]T,定義sigβ(x)=|x|βsgn(x),其中,符號函數sgn(x)定義為:
并令:
h′(v1)=c1v1+c2sigβ(v1)
(19)
由式(19)可知:limz→0h′(z)=0。

(20)
由式(20)可知,V1>0,并對V1求導可得:
-zT(t)(c1z(t)+c2sigβ(z(t)))=
-c1zT(t)z(t)-c2zT(t)sigβ(z(t))=
(21)
定理1. 對于運載火箭姿態控制系統(10),如果假設1~3都成立,根據式(18)所設計的終端滑模控制律保證該系統在有限時間內跟蹤參考信號,控制律如下:
δ=δeq+δd
(22)
(23)

證. 首先選取如下李雅普諾夫候選函數:
(24)
(25)
將式(22)和(23)代入式(25)可得:
(26)
將式(26)代入可得:
(27)

由引理1,系統可在有限時間到達滑模面s=0,假設到達滑模面時間為Tr。由式(18)可得:
(28)
由此可知,可以利用定理1所提出的控制律實現運載火箭姿態跟蹤系統有限時間收斂。

(29)

綜上所述,下面給出非奇異終端控制律:
(30)
3 仿真校驗
本文以文獻[17]中運載火箭姿態控制系統為例,校驗所提出的非奇異終端滑模控制方案的有效性。運載火箭總飛行時間為160 s,每個發動機的推力為P=1200000 N,轉動慣量(Jxx,Jyy,Jzz)和火箭在質心位置Xz是時間的線性函數,表1給出了具體參數。初始姿態角為x1(0)=[-0.1, 10.1, 79.9]T。姿態控制系統的參考信號xir,i=1,2,3分別為:
式中:ω1,2=0.1,ω3=0.05,ζ1,2,3=1,p1,3=0.2,p2=0.4。本文設置助推發動機2在初始時刻卡死,且卡死角度為5°,之后助推發動機2擺角保持常數不變。圖2~4為運載火箭故障下姿態角跟蹤軌跡。其中,圖2為滾轉角跟蹤軌跡;圖3為偏航角跟蹤軌跡;圖4為俯仰角跟蹤軌跡。由圖2~4可知,通過設計的非奇異終端滑模控制律,可以保證姿態角能夠跟蹤控制指令。圖5為姿態角跟蹤誤差,姿態角初始值存在一定的誤差,隨著時間變化,誤差逐漸減小,并在穩態時誤差角小于0.02°,由此可知運載火箭姿態角控制精度較好。此外,由圖5可知,偏航角和俯仰角誤差角度為0時,其導數不為0,即本文的奇異區域,本文通過修改該區域的控制律避免奇異問題的出現。且與文獻[17]對比,本文設置的故障角度較大,但最終誤差角相比更小,具有更高的控制精度。圖6為整角速度ω=[ωx,ωy,ωz]T的變化曲線。圖7為助推發動機擺角變化曲線,由圖7可知,初始時刻助推發動機2卡死,擺角保持在5°不變,系統穩定之后,助推發動機1、3、4的擺角不為0,保持在某個常數。圖8為芯級發動機擺角變化曲線,由圖可知,當系統穩定后,芯級發動機的擺角同樣保持在某個不為0的常數。即當某個發動機發生故障如卡死故障時,本文所設計的控制律借助其余助推發動機和芯級發動機來平衡該故障帶來的影響。由圖2~4可知,運載火箭發動機發生故障后,姿態角仍能較好跟蹤參考信號。因此,本文提出的基于非奇異終端滑模控制策略可以控制故障下運載火箭姿態跟蹤系統,且具有良好的控制精度。

表1 運載火箭仿真中的參數Table 1 Parameter of launch vehicle used in numerical simulations
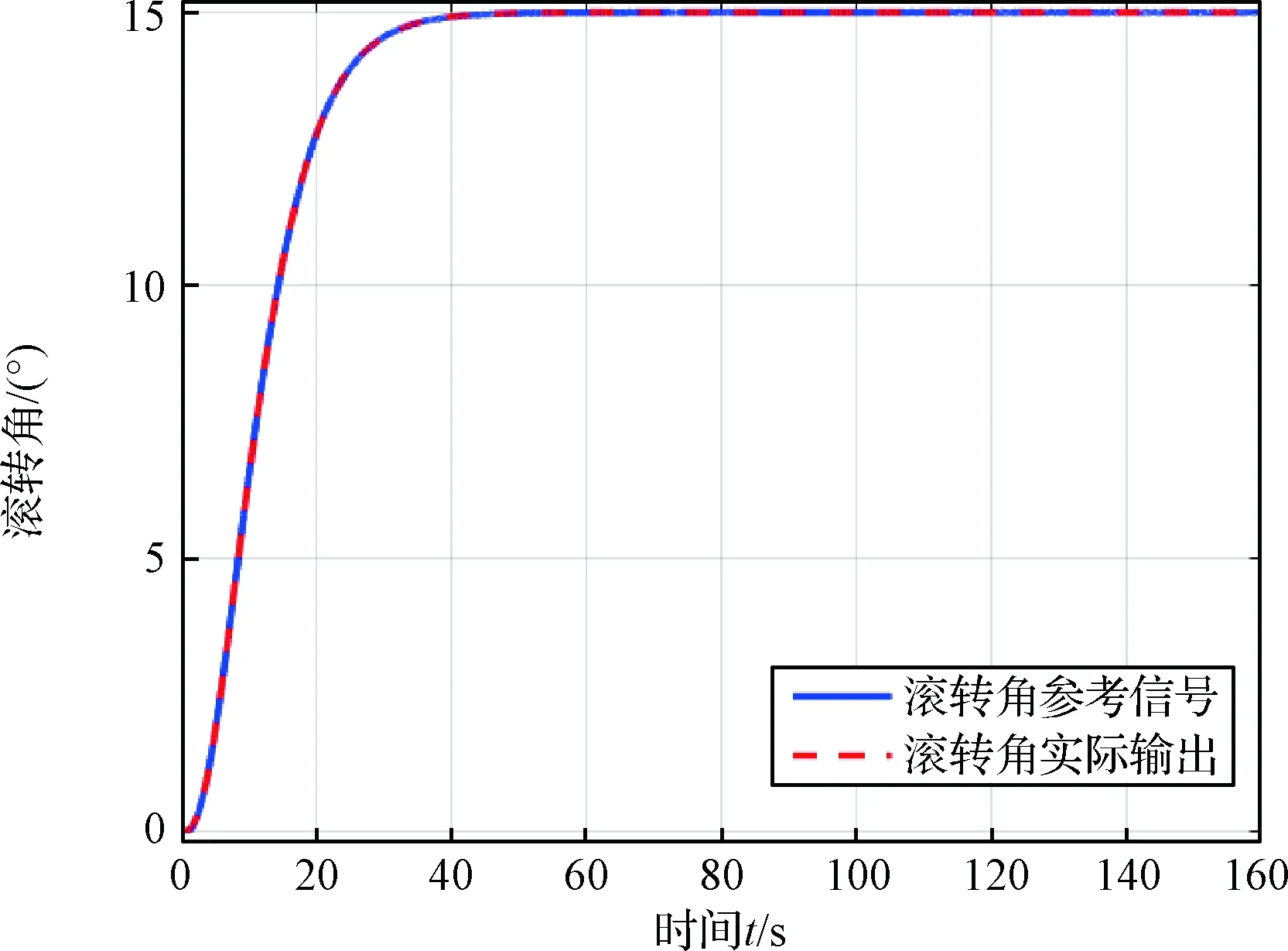
圖2 滾轉角跟蹤軌跡
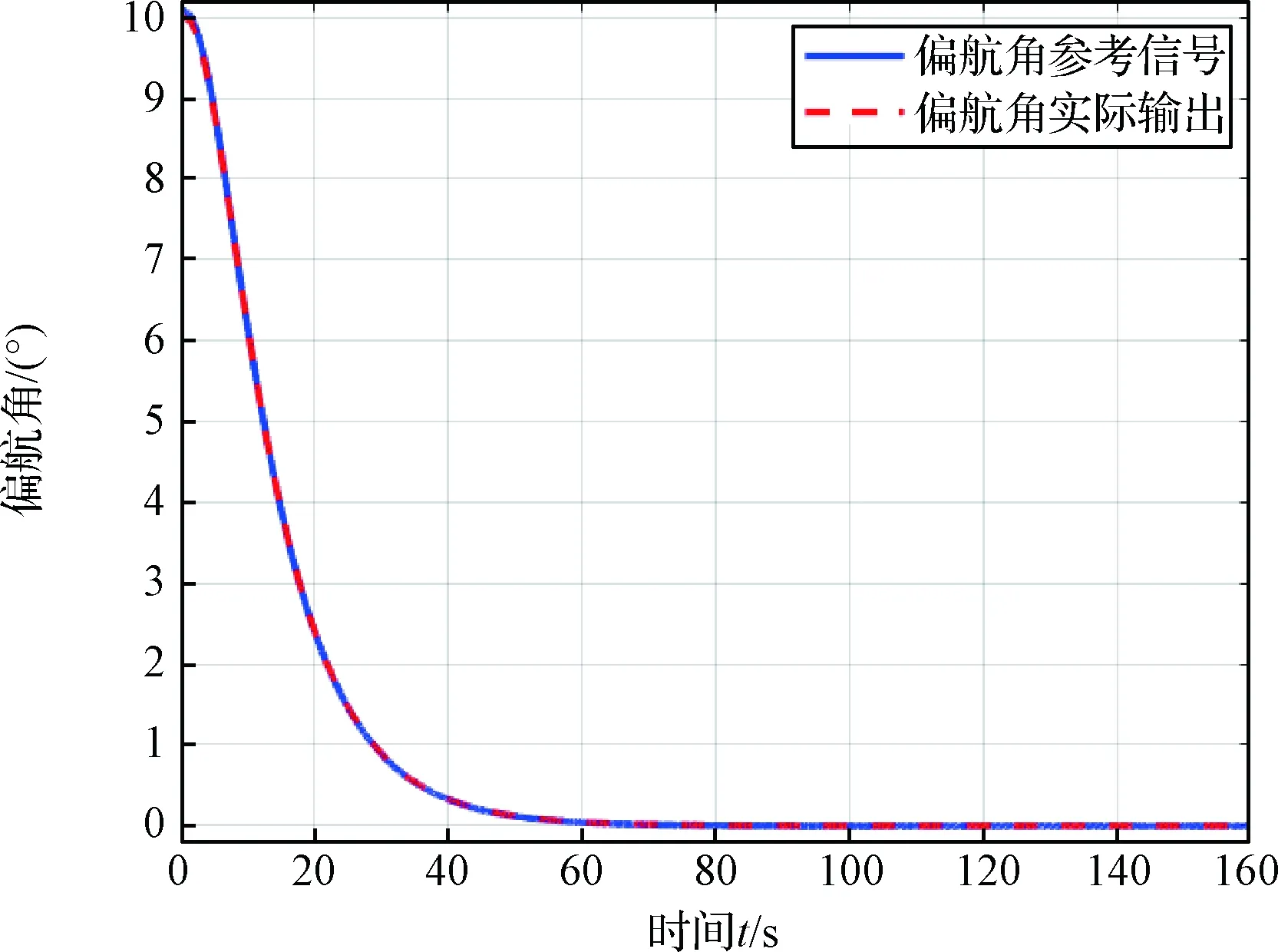
圖3 偏航角跟蹤軌跡
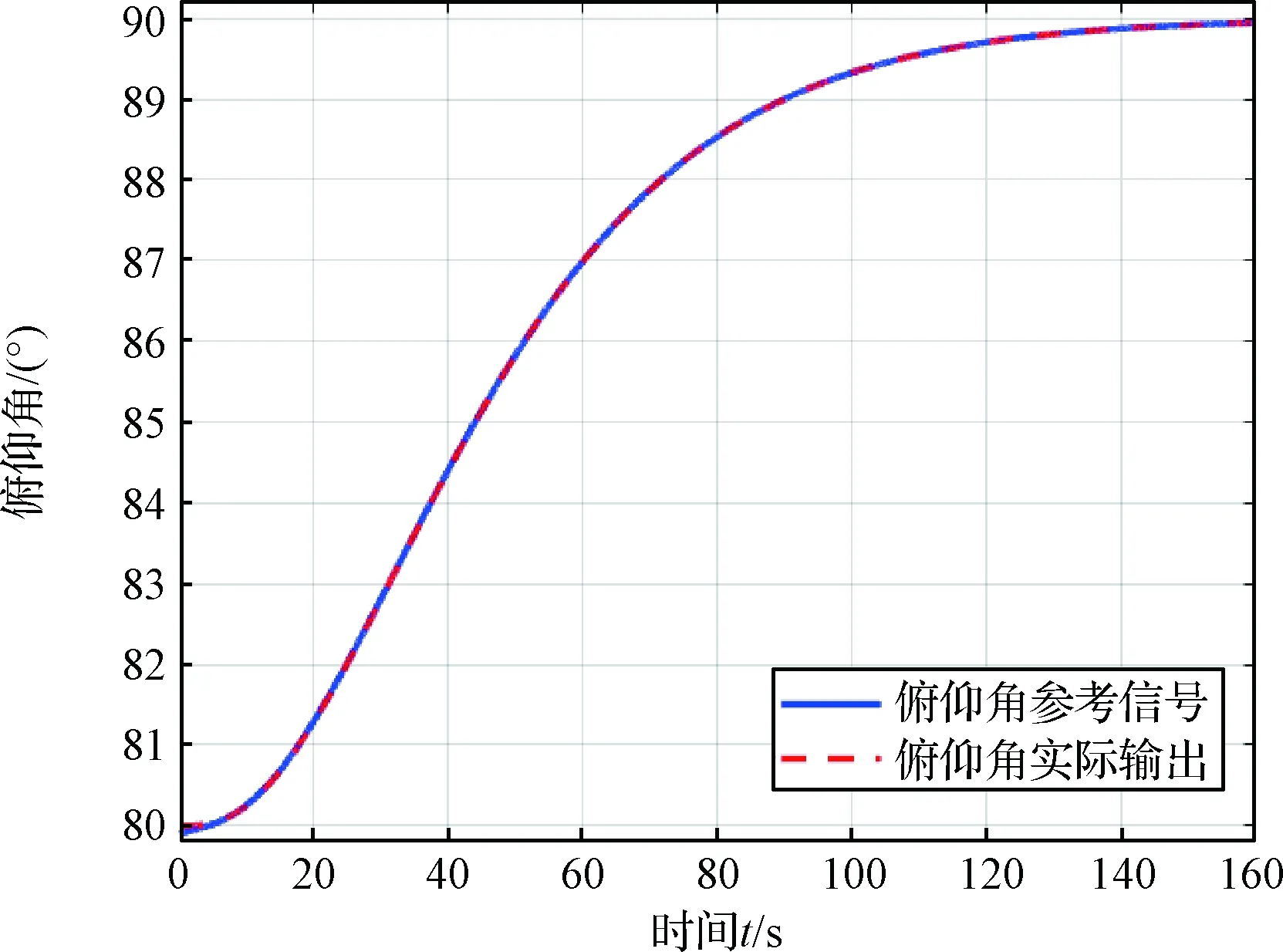
圖4 俯仰角跟蹤軌跡

圖5 姿態角跟蹤誤差
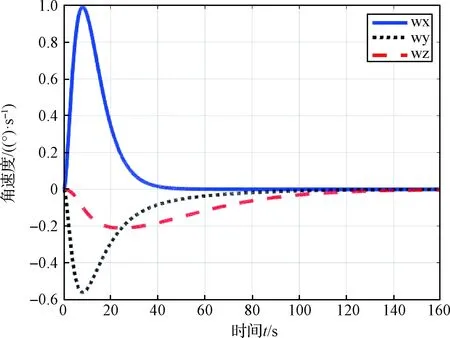
圖6 角速度變化曲線
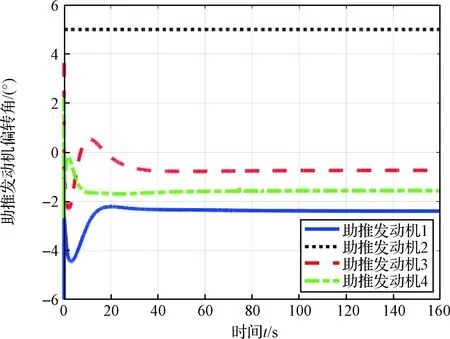
圖7 助推發動機偏轉角度曲線
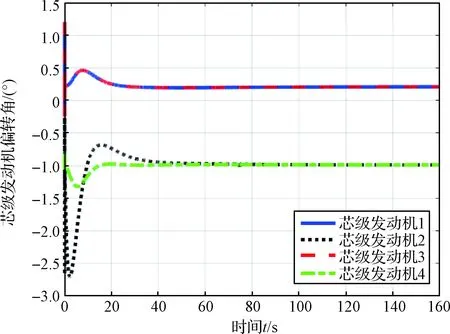
圖8 芯級發動機偏轉角度曲線
4 結 論
本文研究了考慮外部干擾和執行器卡死故障的運載火箭姿態跟蹤控制問題,將執行器卡死故障視為廣義干擾,在此基礎上設計了基于李雅普諾夫函數的非奇異終端滑模控制律。所設計的控制律使得系統閉環軌跡快速到達滑模面并在滑模面上收斂到零。本文通過修改奇異區域的控制律,避免出現奇異問題。所設計的控制律實現了故障情況下對運載火箭姿態角精確跟蹤的控制目標,通過仿真可以進一步校驗所得到的結論。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
汽車與新動力(2015年1期)2015-02-27 12:11:01