無人機組合導航直接法與間接法濾波方式比較
2021-01-08 03:49:24王均暉孫蕊程琦張文宇
北京航空航天大學學報 2020年11期
關鍵詞:卡爾曼濾波
王均暉,孫蕊,2,*,程琦,張文宇
(1.南京航空航天大學 民航學院,南京211106; 2.西安測繪研究所 地理信息工程國家重點實驗室,西安710054)
精確的導航定位信息是實現無人機安全飛行的關鍵。慣性導航系統(INS)和全球導航衛星系統(GNSS)作為2種常用的導航系統,可以有效獲取無人機實時導航定位信息,目前已經在無人機導航中被廣泛應用。GNSS以全球定位系統(GPS)為代表,能夠得到高精度的三維位置、速度;INS由計算機和慣性測量單元(IMU)組成,利用IMU提供的量測信息可以實現自主的導航解算。GPS/IMU通過濾波算法進行組合,算法通過對GPS和IMU數據進行估計、修正、融合,可以有效實現2個系統的互補更新,來解決GPS信號失鎖引起的無法定位問題和IMU長時間積累誤差引起的漂移問題,因此在無人機組合導航中具有非常重要的作用。
GPS/IMU組合導航根據濾波器的種類、輸入傳感器之間的耦合程度、濾波器的觀測輸入量的類型特征等因素可以進行多種分類。例如,以基于不同濾波器類別的組合導航方式可以分為:基于卡爾曼濾波系列的GPS/IMU組合導航[1-3];基于粒子濾波的GPS/IMU組合導航[4-5];以及基于多模態多聯邦卡爾曼濾波的GPS/IMU組合導航等[6-8]。目前,已經有許多文獻對基于不同類型濾波的組合導航進行了詳細的對比分析研究。Georgy等分別利用卡爾曼濾波和粒子濾波將低成本INS與GPS進行組合,并在道路環境下測試這2種組合導航系統的性能[9];陳坡等在仿真的飛機運動狀態下,比較了自適應卡爾曼濾波和H∞濾波應用于GPS/IMU組合導航系統的可行性和有效性[10];聶琦和高曉穎通過數值仿真,比較了使用不同等級的慣性傳感器與GPS組合時sigma點卡爾曼濾波和擴展卡爾曼濾波(EKF)的優劣[11]。眾多研究表明,濾波類型的不同對GPS/IMU組合導航的精度以及魯棒性等方面有著重要的影響,在無人機高動態以及復雜環境的飛行情況下尤為顯著。
基于GPS和IMU之間耦合程度不同可以分為松組合(位置、速度、姿態信息層面)、緊組合(觀測量層面)和深組合(信號層面)。針對不同層面組合導航的比較分析較為成熟,仇立成等利用車載GPS/IMU組合導航的實測數據進行分析,發現緊組合較之松組合能獲得更高的定位精度[12];李妍妍比較分析了松、緊、深3種組合結構下的捕獲跟蹤和信息融合技術并進行了實例驗證,從而更好地搭建組合導航數據處理平臺[13]。其中,松組合具有結構簡單、易于實現的優點;緊組合抗干擾能力強,可使系統快速收斂,從而達到較高導航精度,但結構相對復雜;深組合具有高精度、強抗干擾性,但系統復雜,實現難度大。
基于濾波器觀測量特征不同的組合導航方式可以分為:基于直接法的組合導航方式和基于間接法的組合導航方式。其中,間接法以各導航子系統的誤差量,也就是GPS和IMU輸出的導航參數的誤差作為濾波器的狀態量從而進行濾波計算;直接法以各導航子系統的輸出參數,即GPS和IMU輸出的導航參數作為狀態量來進行濾波估計。目前以直接法為組合導航方式的研究主要包括:李榮冰等設計了基于微型飛行器的GPS/IMU組合導航系統來驗證sigma點直接式濾波方法的有效性和可靠性,仿真結果達到了5 m的定位精度[14];逯嶠等利用基于平方根中心差分卡爾曼濾波(SR-CDKF),解決了直接法濾波估計中姿態、速度和位置等導航參數的非線性問題,達到了分米級的定位精度[15]。文獻[14-15]表明直接法建模的方式具有簡單、直接的優點,并且在靜態橋梁形變數據平滑、車輛運動估計等領域進行了有效的應用。同樣,間接法也是一種常用的組合導航模式。徐田來等通過輸入位置誤差、速度誤差以及姿態誤差量,構建一種基于模糊自適應卡爾曼濾波的車載GPS/IMU組合導航系統,在仿真情況下將經緯度的誤差控制在1″內[16];吳富梅和楊元喜利用小波閾值消噪的自適應濾波削弱IMU誤差的影響,有效地分離有用信號和噪聲信號,提高了GPS/IMU組合導航系統的精度和可靠性,達到了0.6 m均方根誤差(Root Mean Squared Error,RMSE)的定位精度[17]。
雖然間接法和直接法都在組合導航的工程實踐中被廣泛應用,針對這兩者在不同場景條件下的比較分析卻少有研究。李開龍等從系統模型、濾波算法以及應用等方面對組合導航的直接法和間接法進行了分析,通過車載實驗,針對不同路況的數據評估各自導航性能,結果表明,高機動條件下可選擇直接法,而靜態和低速運動時應選擇間接法,但是該結論并不適用于三維空間內無人機的飛行[18]。因此,為了進一步分析不同種建模方式,探索給定應用場景下2種建模方式的組合導航的性能差異,對算法的適用性有進一步的了解從而更好地服務于工程應用。本文在直接法和間接法的組合模式下,分別設計了基于EKF的GPS/IMU組合導航系統的算法,并基于仿真數據和實際數據對2種組合模式的算法精度進行詳細地比較分析,為無人機在不同場景下的安全飛行提供有效的技術支撐。相對于載波相位的整周模糊度的難點,偽距法定位具有速度快、無多值性問題的優點,故本文利用偽距法對GPS進行定位解算。
1 基于EKF的組合導航模型構建
本節內容主要針對直接法和間接法組合模式,設計了基于EKF的GPS/IMU組合導航系統的算法。由于松組合結構簡單、計算量相對較小,適用于對實時性要求較高的系統,因此將用松組合來比較分析無人機的組合導航系統在2種組合模式下的算法精度。
1.1 松組合直接法
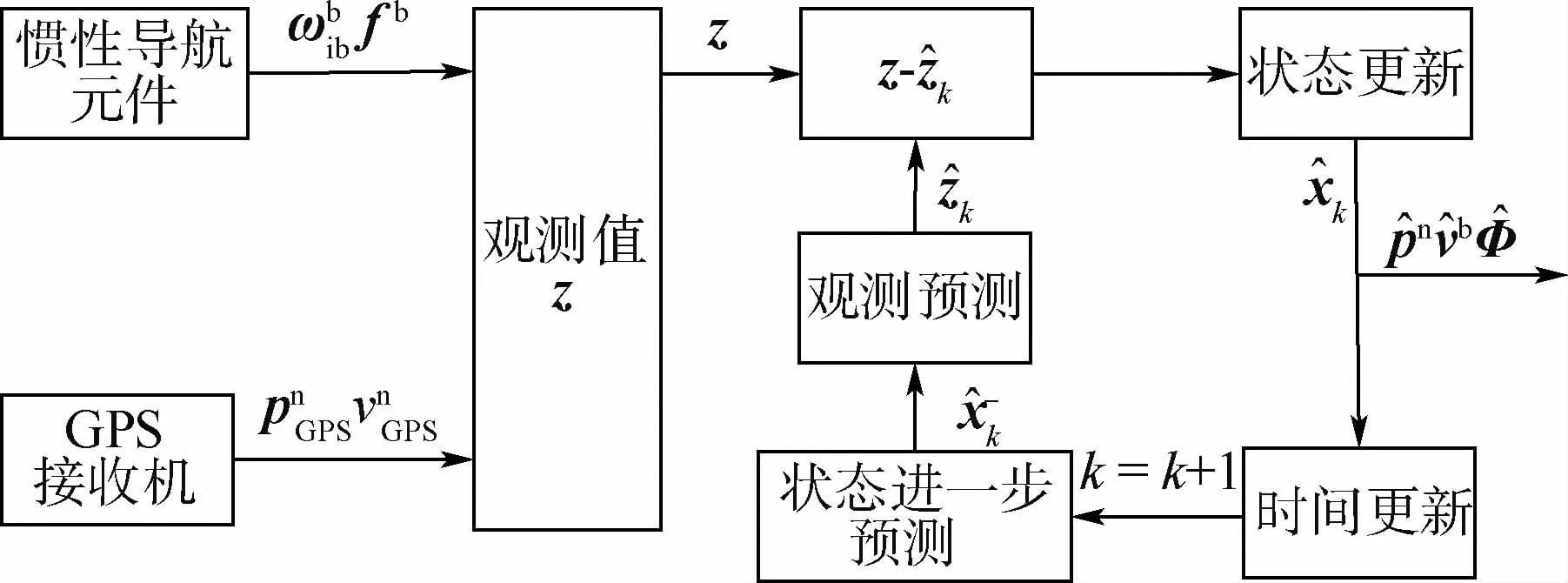
圖1 直接法濾波Fig.1 Direct mode of filtering

1.2 松組合間接法
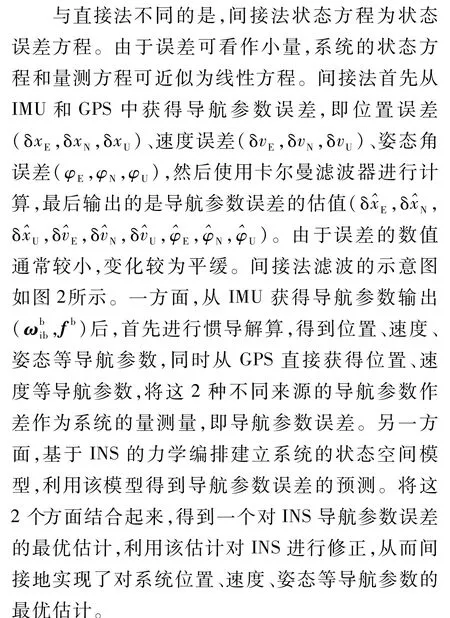

圖2 間接法濾波Fig.2 Indirect mode of filtering
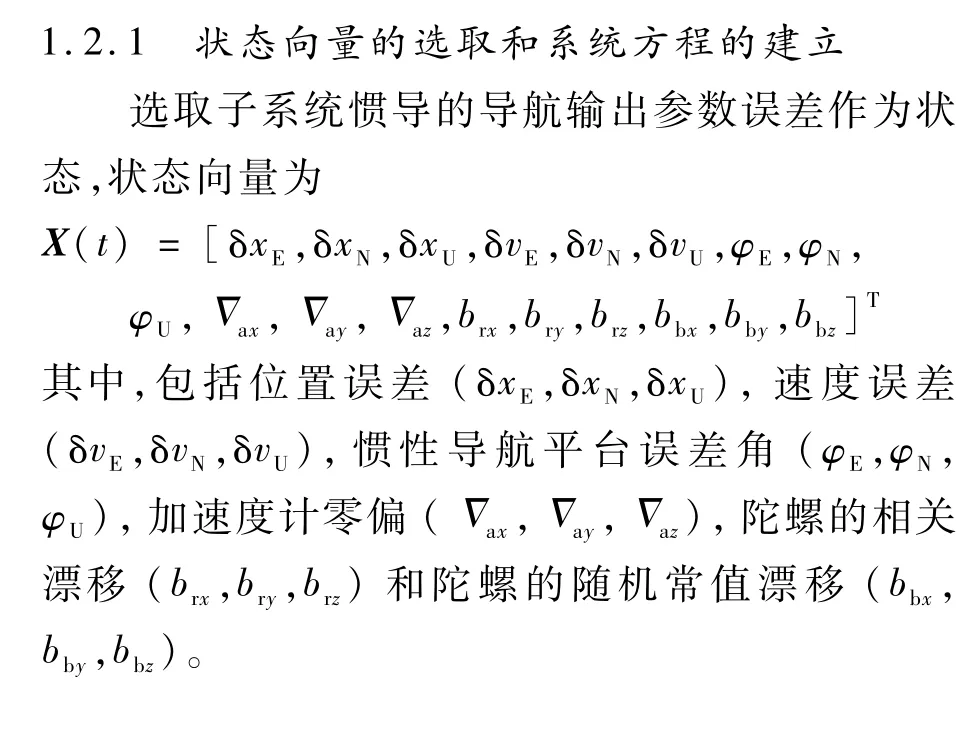
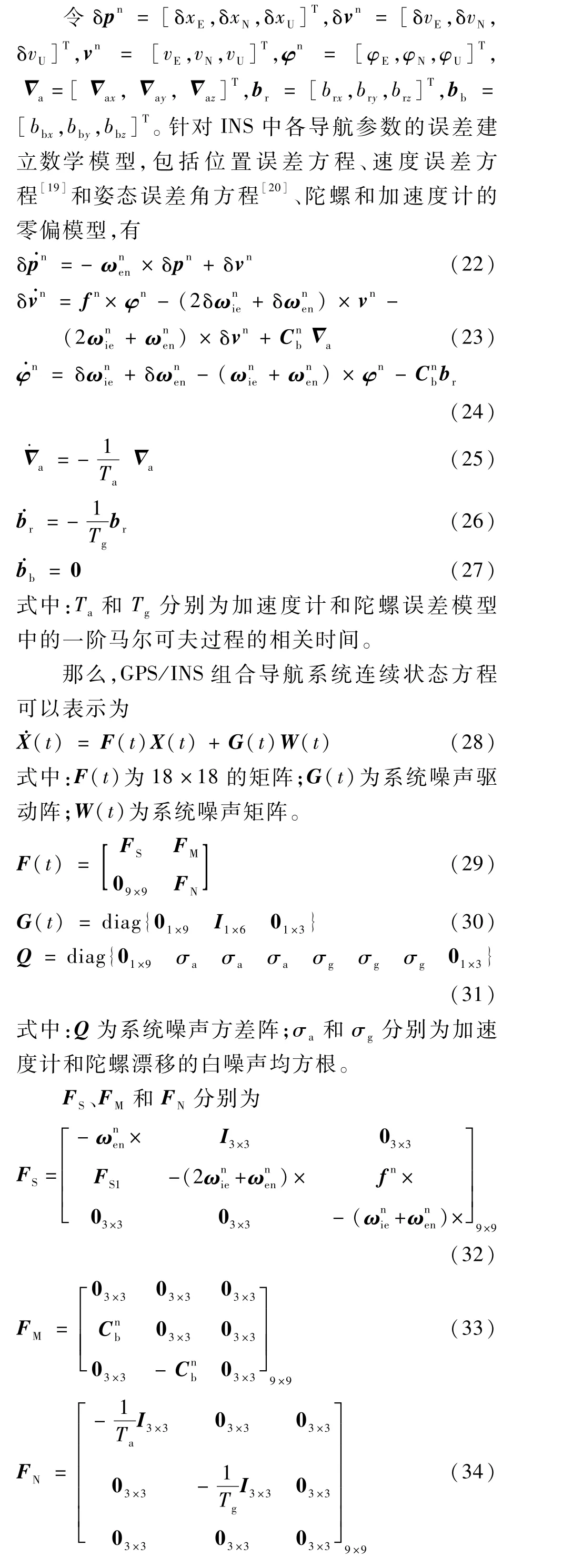
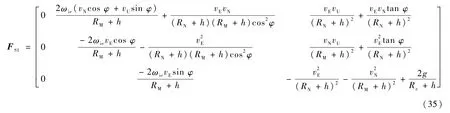
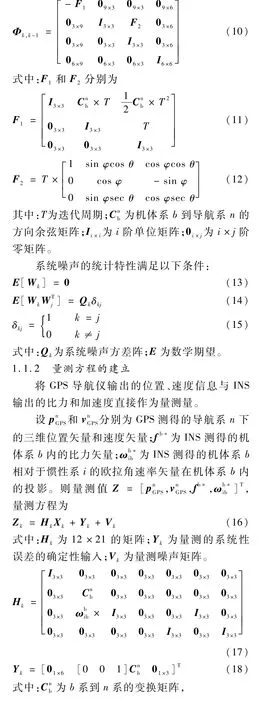
式中:ωie為地球自轉角速度;h為大地高;f為加速度計輸出的比力值;g為重力加速度;RM、RN和Re分別為地球的子午圈曲率半徑、卯酉圈曲率半徑和平均半徑。
1.2.2 量測方程的建立
設vn=[vE,vN,vU]T為三維速度信息,下標E、N和U分別表示東向、北向和天向,上標I和G分別為該信息由INS和GPS輸出,設λ,L和h分別為經度、緯度和高度,下標I和G分別為該信息由INS和GPS輸出。間接法里所采用的量測方程將INS與GPS接收機給出的位置、速度信息的差值作為量測量。量測值為

2 實驗仿真
本實驗利用MATLAB構建仿真環境,生成無人機運動狀態、GPS接收機輸出以及慣性元件的測量值。無人機軌跡包含了上升、平飛、下降等多個航段,有利于本文全面地對直接法和間接法組合導航的定位精度進行評估。針對組合導航直接法和間接法的情形,分別利用EKF進行了仿真實驗。其中,GPS的采樣頻率選取10 Hz,接收機誤差包括熱噪聲、多路徑以及電離層誤差等,表1為INS的相關參數設置,頻率選取100 Hz。
仿真實驗中,導航信息的初始誤差為:水平姿態誤差20′,方位誤差20′,位置誤差1.5 m,速度誤差2 m/s。初始航向角為90°,初始位置為北緯39°西經81°,海拔高度0 m。此外,為更好地評價組合導航系統的性能,本文設置無人機飛行過程中的丟星場景如表2、表3所示。圖3為仿真無人機的三維飛行軌跡圖,圖4為仿真飛行軌跡的速度。
圖5為丟星場景1下無人機的仿真飛行軌跡,包括參考軌跡、GPS接收機基于偽距解算得到的位置以及直接法和間接法濾波得到的軌跡。圖6為組合導航系統在場景1下的位置誤差。表4為場景1最大位置誤差。結合圖表可以看出,場景1下,直接法的位置誤差可達上百米,尤其是轉彎部分丟星的15 s,東向位置誤差達到100 m,北向位置誤差達80 m,天向位置誤差達200 m;而間接法的位置誤差,即使在丟星段,三維位置誤差均控制在10 m內。
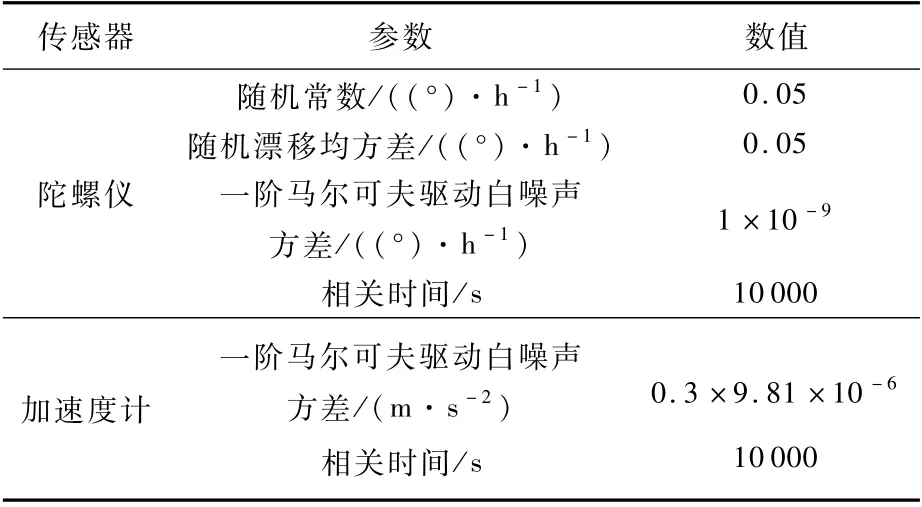
表1 慣性導航系統參數設置Table 1 Parameter setting of INS
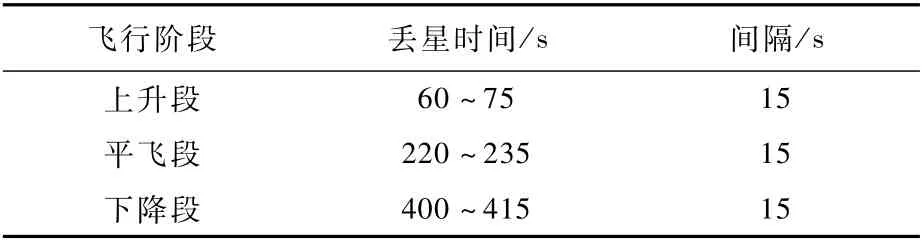
表2 仿真環境下丟星場景1設置Table 2 Setting of lost star in Scenario 1 under simulation environment
表3 仿真環境下丟星場景2設置Table 3 Setting of lost star in Scenario 2 under simulation environment
場景1下,受丟星15 s影響,直接法和間接法位置誤差的差距達到2個數量級,同時,第3節的真實數據驗證部分,丟星均不超過5 s。因此,以下重點對場景2展開具體分析。
圖7和圖8分別為場景2下無人機的仿真飛行軌跡的平面圖和高程圖,包括參考軌跡、GPS接收機基于偽距解算得到的位置以及直接法和間接法濾波得到的軌跡。
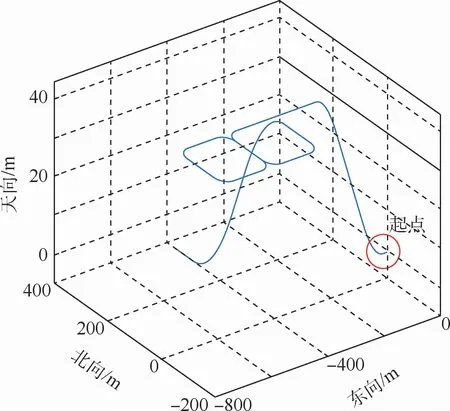
圖3 無人機的三維飛行軌跡Fig.3 3D flight trajectory of UAV
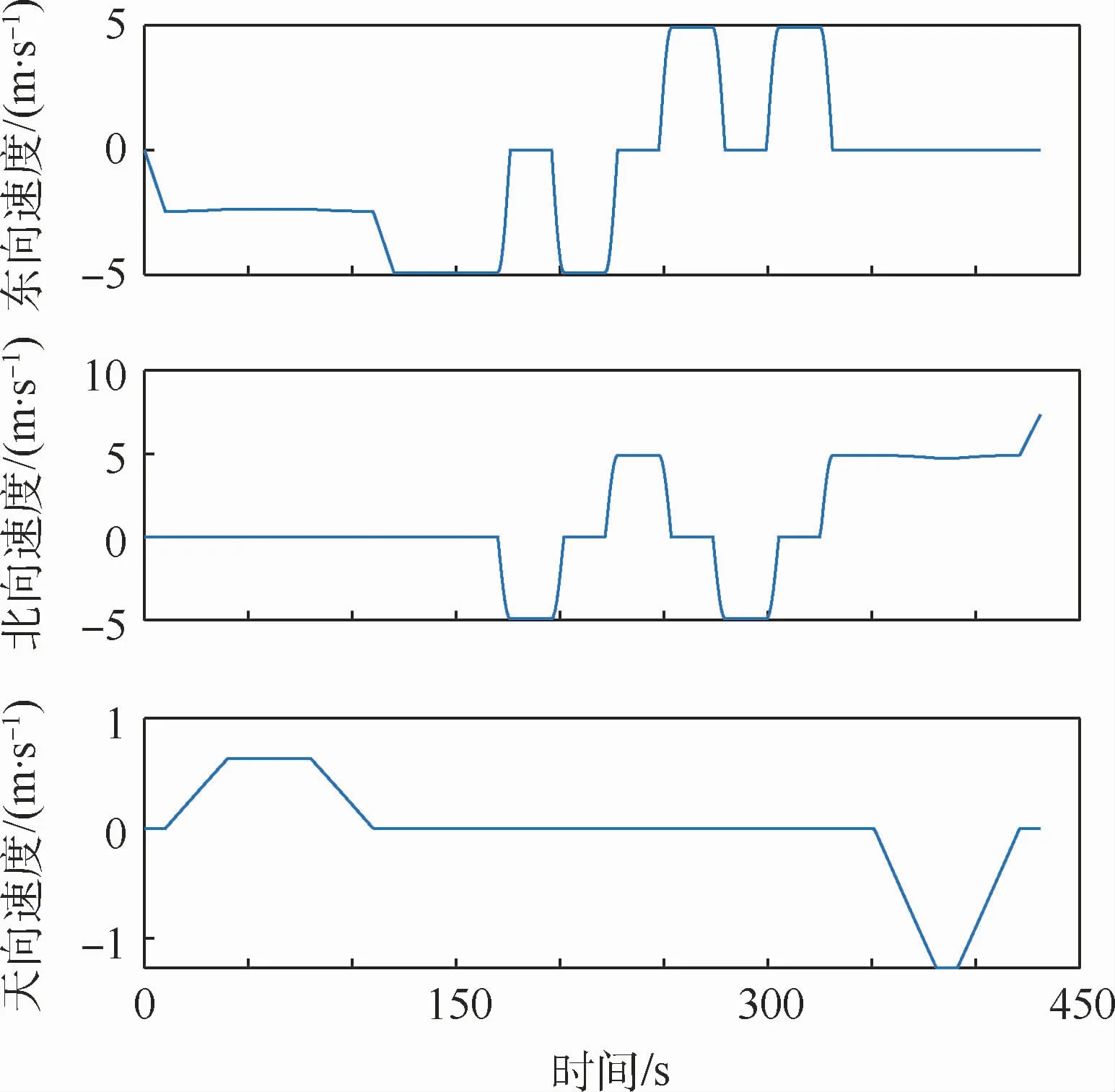
圖4 仿真飛行軌跡的速度Fig.4 Velocity of simulated flight trajectory
圖9為場景2下組合導航系統狀態運動的位置誤差,包括GPS位置相對于參考軌跡的差值、直接法和間接法濾波后各自的位置誤差。圖10和圖11分別為組合導航系統在2種不同組合模式下的速度誤差和姿態誤差。
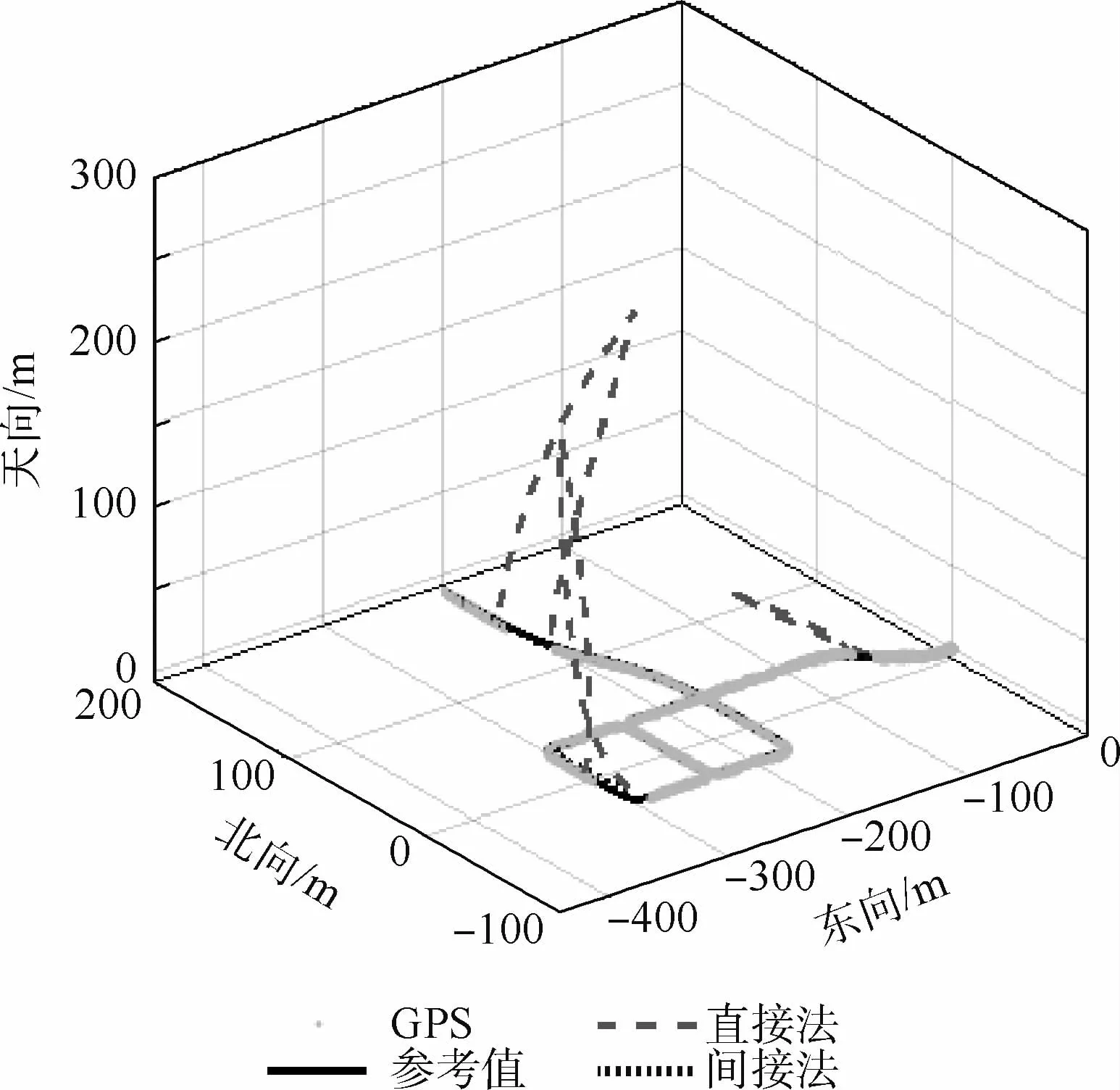
圖5 場景1仿真飛行軌跡Fig.5 Simulated flight trajectory in Scenario 1
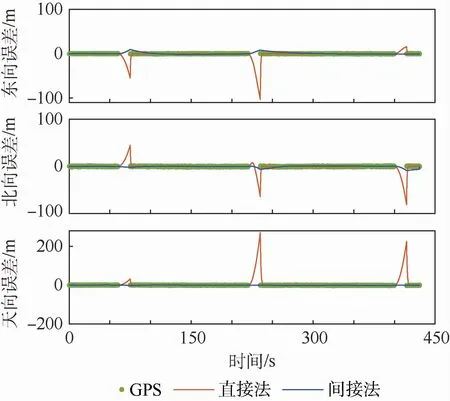
圖6 場景1位置誤差Fig.6 Position errors in Scenario 1
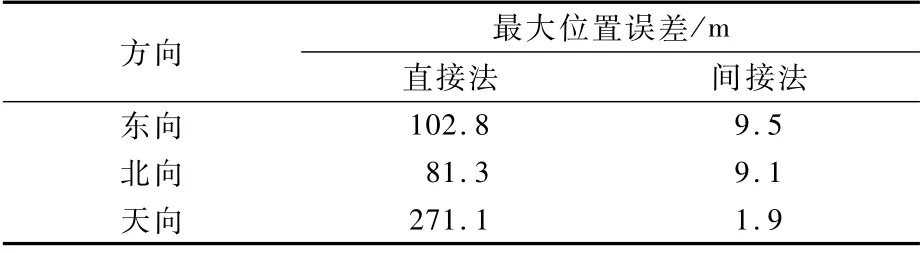
表4 場景1最大位置誤差Table 4 Maximum position error in Scenario 1
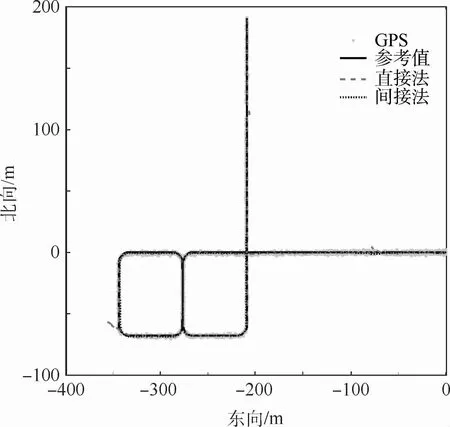
圖7 場景2仿真飛行軌跡(水平維度)Fig.7 Simulated flight trajectory in Scenario 2(horizontal dimension)
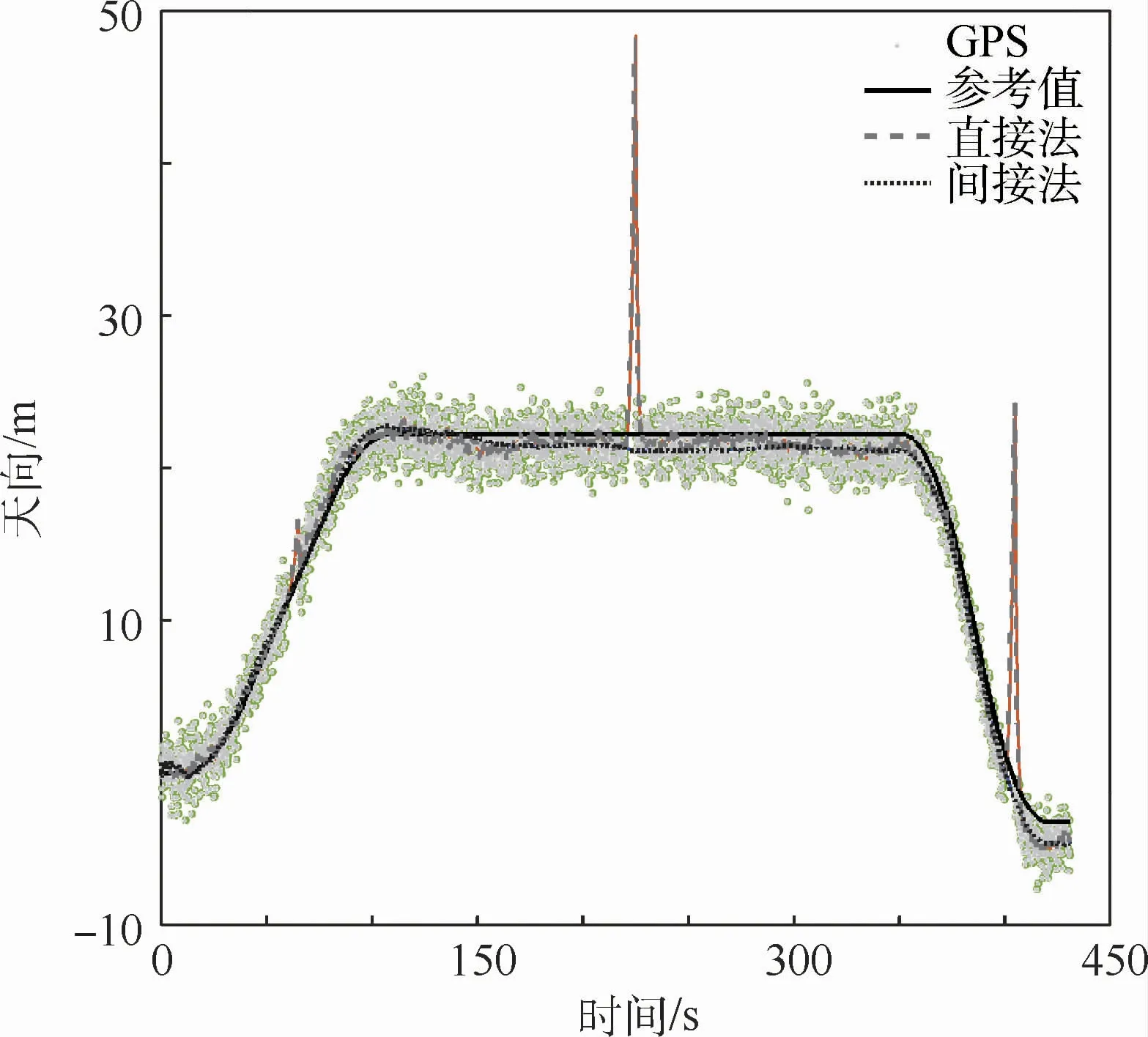
圖8 場景2仿真飛行軌跡(豎直維度)Fig.8 Simulated flight trajectory in Scenario 2(vertical dimension)
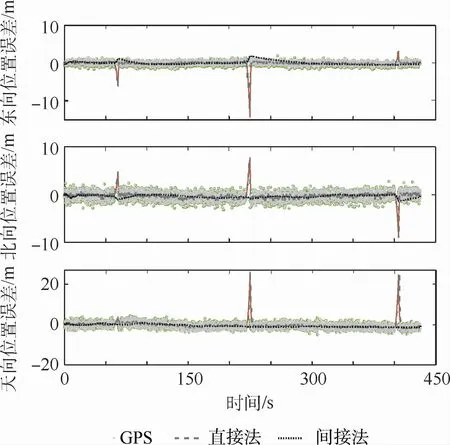
圖9 場景2位置誤差Fig.9 Position errors in Scenario 2

圖10 場景2速度誤差Fig.10 Velocity errors in Scenario 2
計算場景2下直接法、間接法和GPS的位置RMSE見表5。計算直接法和間接法的速度RMSE、姿態RMSE分別見表6、表7。仿真環境下直接法和間接法運行時間見表8。
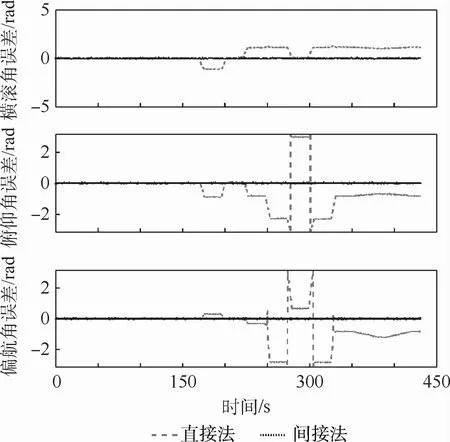
圖11 場景2姿態誤差Fig.11 Attitude errors in Scenario 2
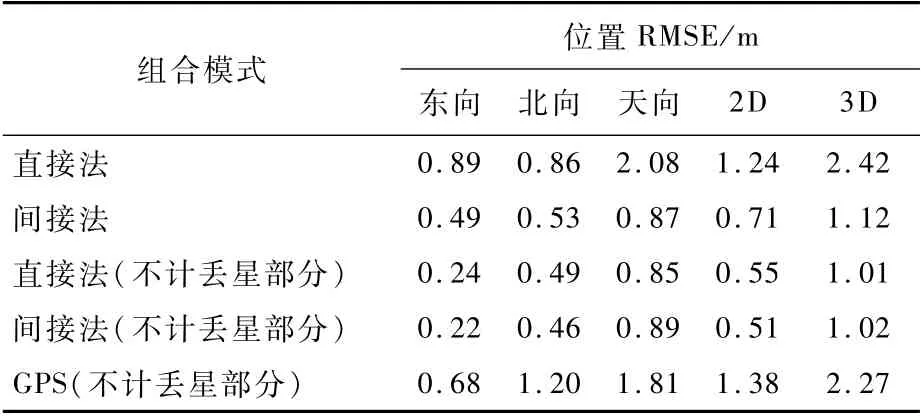
表5 場景2下直接法、間接法和GPS的位置RMSETable 5 Position RMSE of direct mode,indirect mode and GPS in Scenar io 2
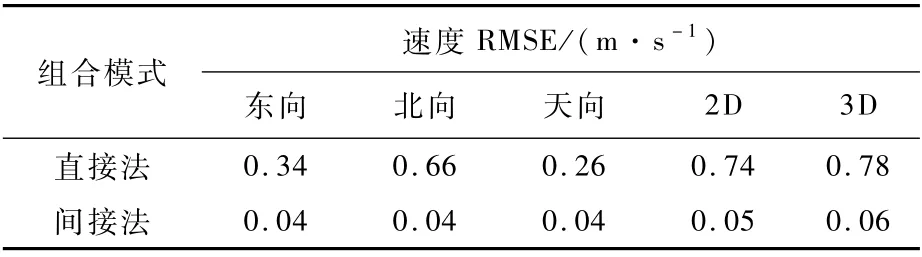
表6 場景2下直接法和間接法的速度RMSETable 6 Velocity RMSE of direct mode and indirect mode in Scenario 2
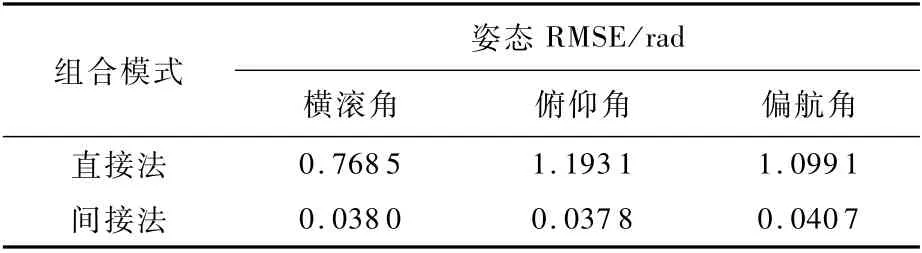
表7 場景2下直接法和間接法的姿態RMSETable 7 Attitude RMSE of dir ect mode and indirect mode in Scenario 2
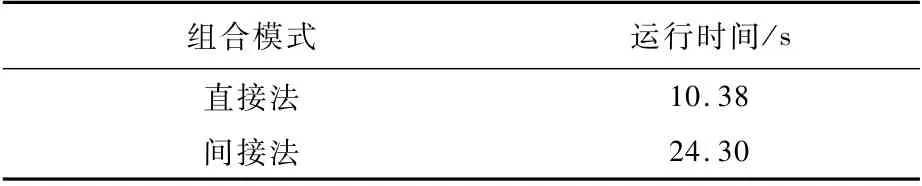
表8 場景2下直接法和間接法運行時間Table 8 Runtime of direct mode and indirect mode in Scenar io 2
總體來說,松組合直接法和間接法濾波分別達到了2.42 m和1.12 m的定位精度,速度誤差分別為0.78 m/s和0.06 m/s,實驗運行所需時間分別為10.38 s和24.30 s。若不考慮丟星部分,直接法的水平位置和垂直位置均方根誤差值分別控制在0.55 m和0.85 m以內,間接法則控制在0.51 m和0.89 m。顯然,在GPS不丟星的情況下,直接法和間接法對于定位精度的提高不分伯仲,這也驗證了從本質上來說直接法和間接法同根同源,都是INS力學編排和卡爾曼濾波相結合的結果。然而,間接法在正式濾波之前需要進行慣導解算,直接法則將慣導解算的過程融入到了狀態空間模型的建立中,濾波和解算合二為一,從而簡化了計算步驟。因此,在仿真實驗中松組合直接法的運行速率約為間接法的2.5倍。
在實際應用下,丟星是不可避免的。在本實驗中設置的包含丟星的場景下,直接法和間接法的水平位置均方根誤差值分別控制在1.24 m和0.71 m以內,垂直位置均方根誤差值控制在2.08 m和0.87 m。直接法中,INS隨時間推移位置誤差不斷累積,當GPS信號丟失,只能依靠單純INS導航,位置、速度誤差迅速增加;間接法在丟失GPS信號后,不斷利用上一時刻估計的誤差遞推,修正慣導,丟星時間又較短,估計出的誤差與實際累積誤差相近,故精度下降有限。
丟星場景下,直接法濾波不穩定,軌跡偏移最大可達20 m;間接法濾波相對穩定,軌跡的偏移很小。此外,在上升段丟星的5 s內,直接法濾波的位置誤差和速度誤差分別控制在8 m和5 m/s以內,間接法軌跡便偏移在3 m內,這是由于無人機處于勻速上升段,姿態、速度均保持不變,丟星后間接法基本不變,直接法有偏移但可控;在平飛段的5 s丟星,無人機正在轉彎,姿態、速度不斷地變化,直接法三維位置誤差和速度誤差最大均超過20 m和5 m/s,間接法此時誤差略大于上升段,但在5 m內;在下降段的5 s丟星,無人機處于減速下降階段,需要不斷調整姿態來保持飛行,但由于速度較小,故誤差與平飛段的5 s丟星相近,直接法的東向和北向位置誤差控制在10 m內,速度誤差控制在10 m/s內,間接法的誤差基本保持不變。此外,由于直接法的濾波方程中包含了位置、速度、姿態等不同數量級的物理量,而在濾波過程中優先考慮了位置和速度,隨著時間的推移,對于姿態的濾波逐漸發散,如圖11所示;間接法主要針對各個誤差量進行濾波,數量級相近,故整體濾波效果優于直接法。最后,松組合直接法對于速度和姿態的濾波效果遠比間接法差,姿態變化對于直接法濾波影響較大,濾波后的姿態相對于間接法非常不穩定,且在丟星時速度誤差急劇增大,進而帶來定位精度的降低。
仿真結果表明,松組合直接濾波法和間接濾波法在不丟星情況下對于導航系統的精度提高相差不大。考慮丟星,松組合間接法在精度和穩定性方面均優于直接法,但在濾波計算速度方面直接法優于間接法。
3 實例驗證
本文的試驗數據采用2018年2月25日于臺灣南投采集的無人機飛行數據,飛行時間約20 min。所用無人機和試驗環境如圖12所示,試驗場地和飛行軌跡如圖13所示,表9為組合導航系統中各傳感器的相關參數設置。
本文分別使用組合導航直接法和間接法2種建模方式進行濾波,如圖14和圖15所示,其中,GPS位置信息為基于C/A碼偽距解算定位的結果。2種組合方式下的組合導航系統狀態運動位置誤差、速度誤差和姿態誤差分別如圖16~圖18所示。

圖12 所用無人機和試驗環境Fig.12 UAV used and test environment

圖13 試驗場地與飛行軌跡鳥瞰圖Fig.13 Test site and aerial view of flight path
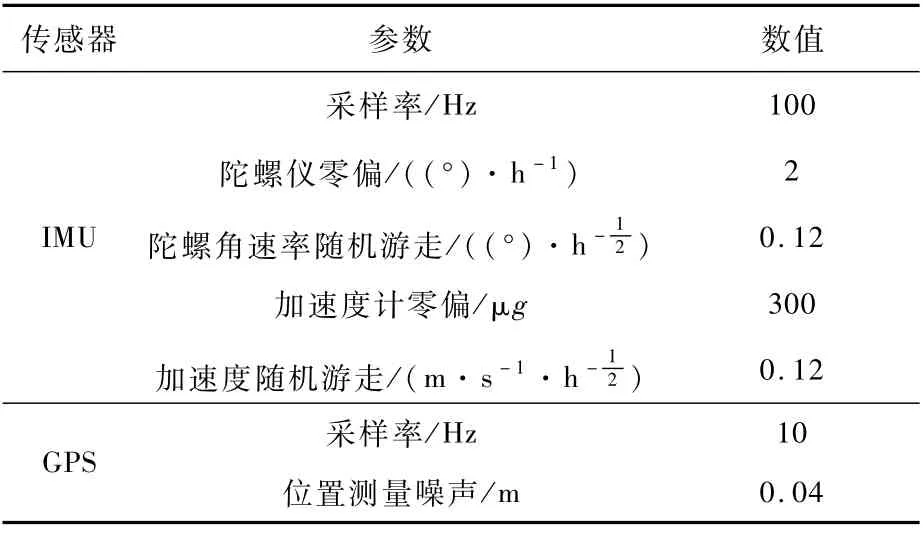
表9 組合導航系統測量精度Table 9 Measurement accuracy of integrated navigation system
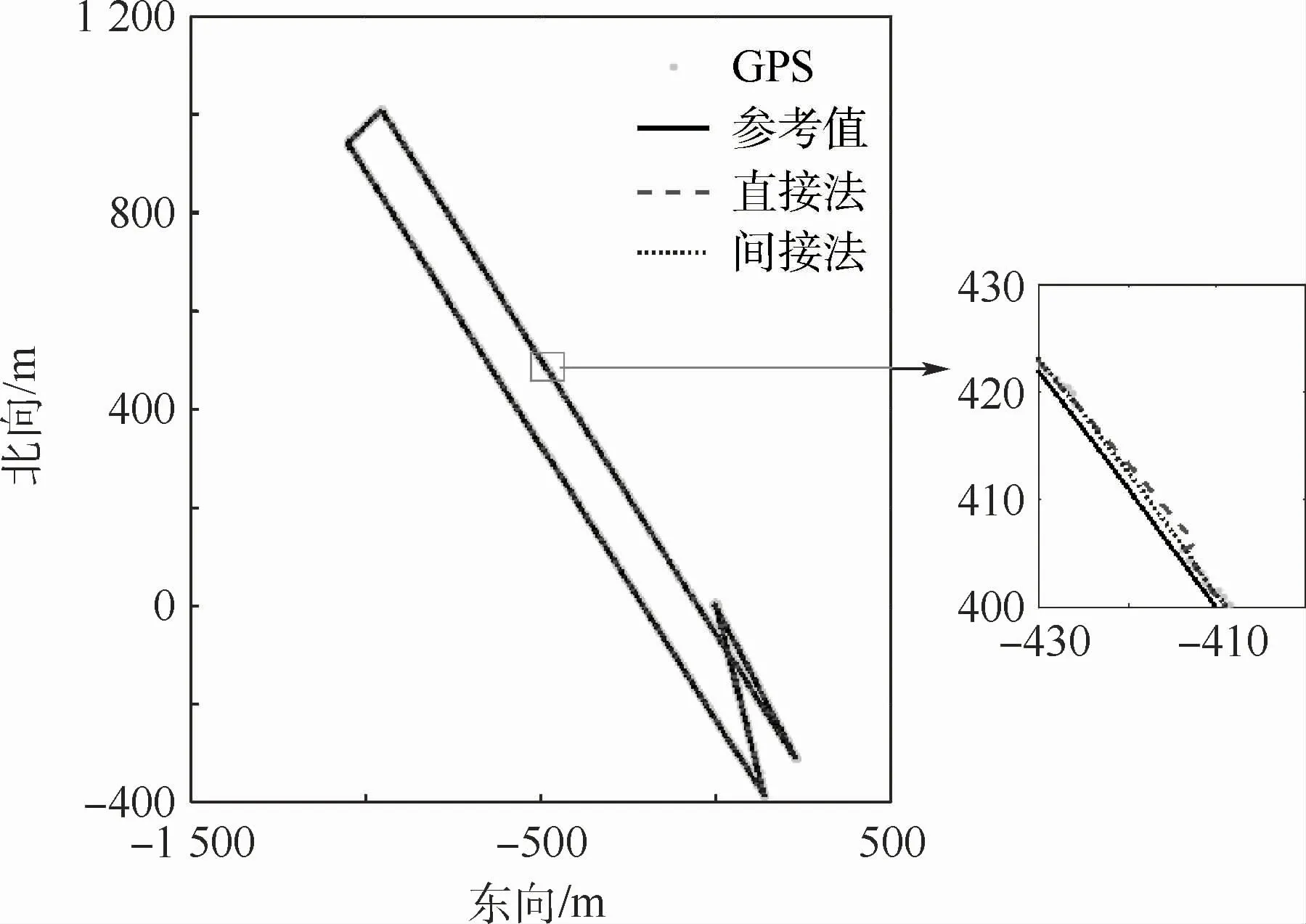
圖14 試驗飛行軌跡(水平維度)Fig.14 Test flight trajectory(horizontal dimension)
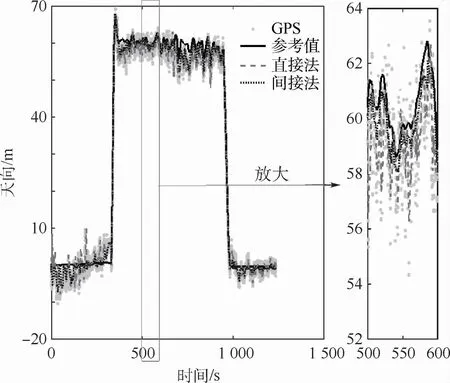
圖15 試驗飛行軌跡(豎直維度)Fig.15 Test flight trajectory(vertical dimension)
計算本試驗中直接法、間接法和GPS的位置RMSE見表10。計算直接法和間接法的速度RMSE、姿態RMSE分別見表11、表12。直接法和間接法運行時間見表13。

圖16 試驗飛行軌跡的位置誤差Fig.16 Position errors of test flight trajectory

圖17 試驗飛行軌跡的速度誤差Fig.17 Velocity errors of test flight trajectory
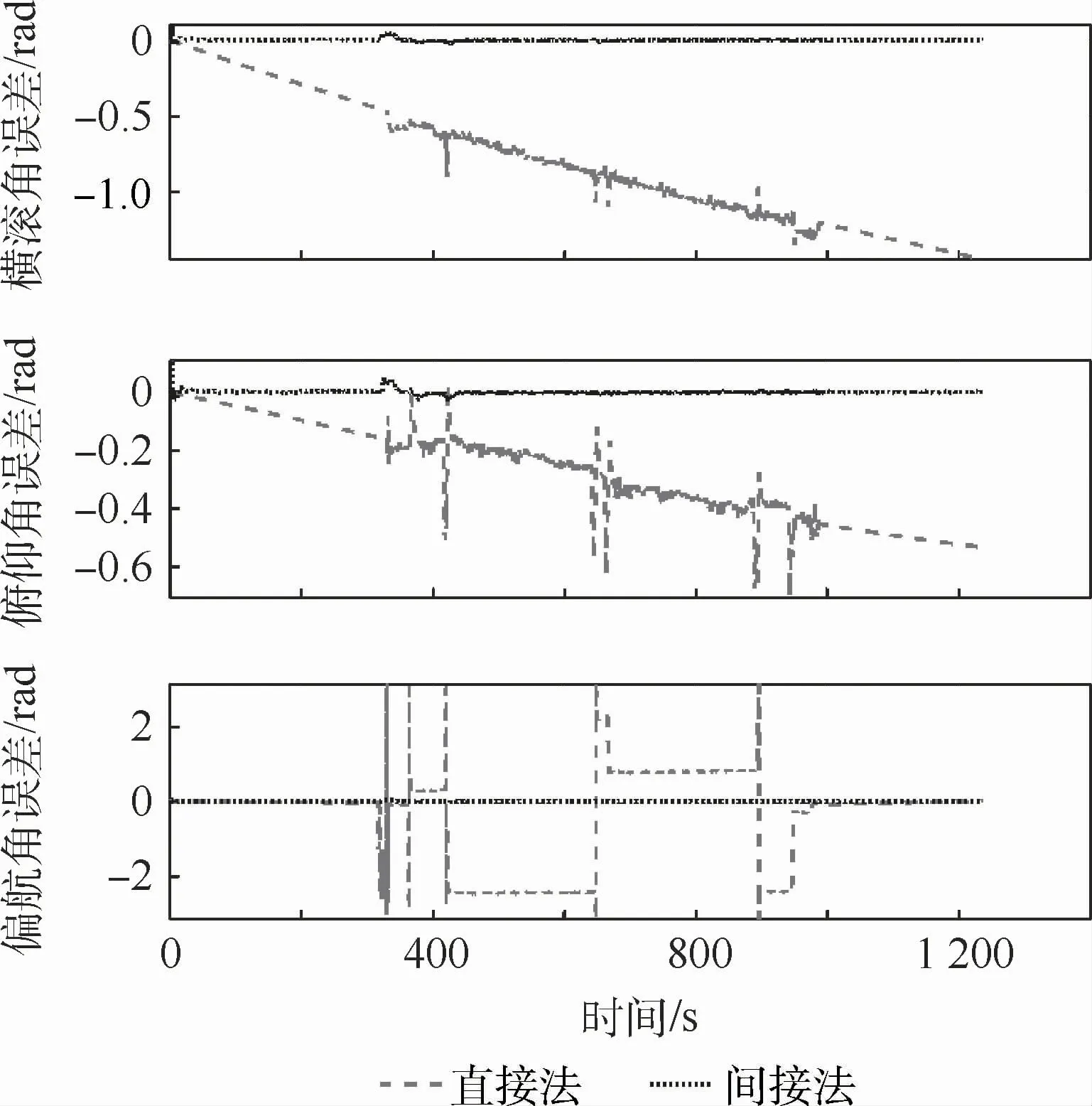
圖18 試驗飛行軌跡的姿態誤差Fig.18 Attitude errors of test flight trajectory
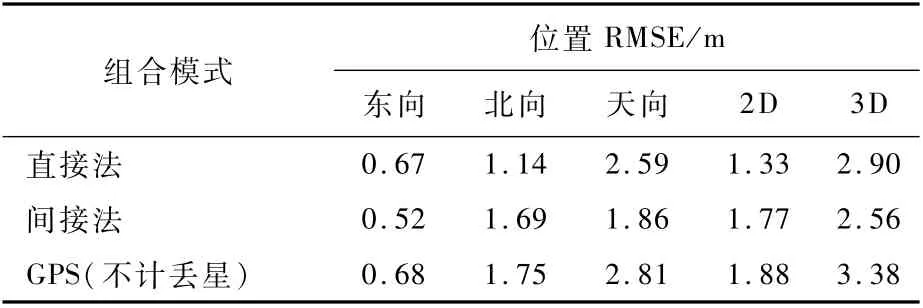
表10 直接法、間接法和GPS的位置RMSE(與Inertial Explorer相比)Table 10 Position RMSE of direct mode,indirect mode and GPS(compar ed to Iner tial Explor er)
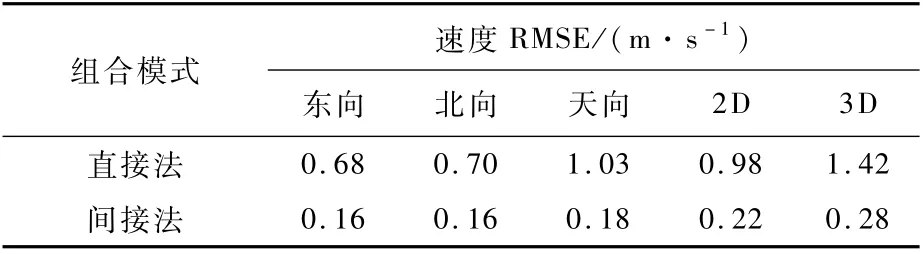
表11 直接法和間接法的速度RMSETable 11 Velocity RMSE of direct mode and indirect mode
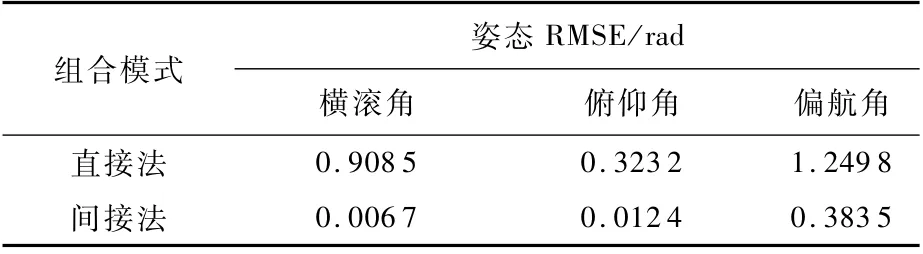
表12 直接法和間接法的姿態RMSETable 12 Attitude RMSE of direct mode and indirect mode
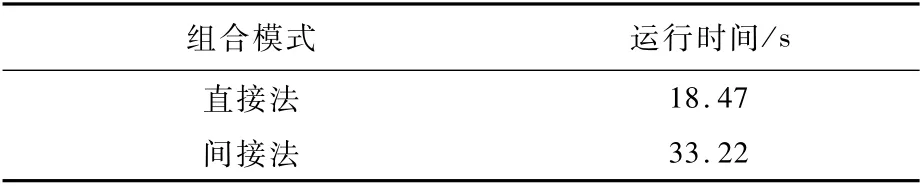
表13 直接法和間接法運行時間Table 13 Runtime of direct mode and indirect mode
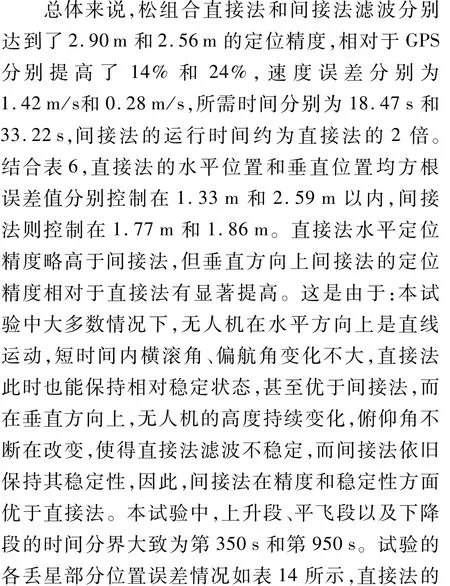
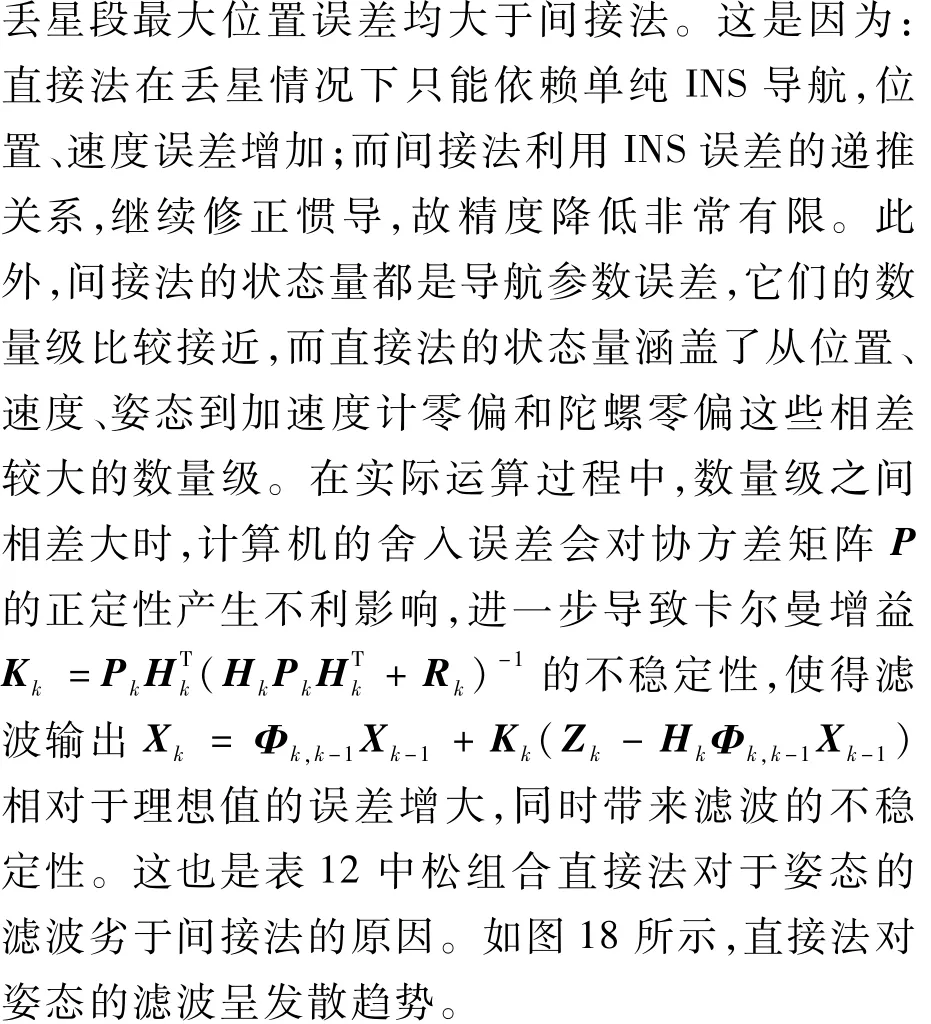
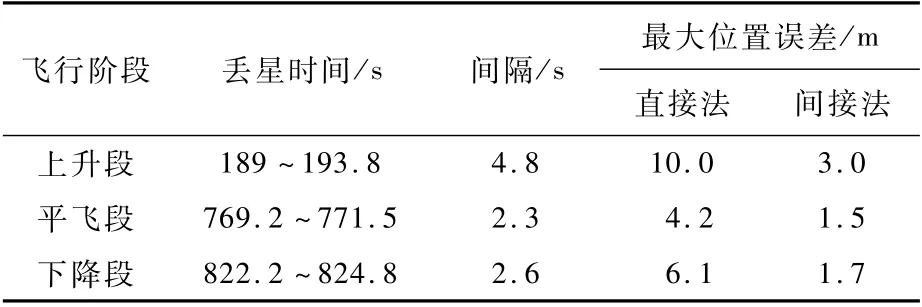
表14 各丟星部分最大位置誤差Table 14 Maximum position error in lost-star parts
與仿真環境不同,無人機在實際飛行時,除了組合導航子系統的性能外,還受自身尺寸、性能、飛控系統等的影響。此外,外界復雜的氣象條件和操縱人員的技術也對無人機的飛行具有一定的影響。本試驗進行的實際環境中,受多種因素聯合作用,無論是上升、平飛還是下降段,無人機的飛行狀態一直處于高動態變化中,這一點可以從圖14和圖15直接看出,這些因素使得其真實位置、速度、姿態無規律波動,進一步加劇了直接法濾波的不穩定性,這是本試驗中姿態發散相對于仿真環境下更快的原因。
試驗結果表明,松組合直接濾波法和間接濾波法均能一定程度上提高導航系統的精度,且在精度和穩定性方面松組合間接法優于直接法,在濾波計算速度方面直接法優于間接法。這也進一步驗證了仿真實驗結果的合理性。
因此,直接法和間接法均能提高動態無人機的導航系統精度和穩定性,且間接法優于直接法,但間接法的濾波計算速率比直接法慢。
4 結 論
本文挖掘了高動態無人機導航中的狀態估計問題,分析了GNSS/INS的組合導航系統在無人機中的應用,針對2種主要組合方式——直接法和間接法,分別設計了基于EKF的松組合導航算法。主要結論如下:
1)試驗表明,理想的不丟星場景下,直接法和間接法的精度相當。真實情況中不可避免存在丟星問題,此時間接法在精度和穩定性方面優于直接法,且丟星情況越嚴重,間接法的優勢越明顯;而直接法在濾波計算速率方面優于間接法。
2)目前,系統計算性能的提升可以有效解決計算效率的問題。因此,在面向高精度、高可靠性需求的無人機應用中,建議選擇間接法作為無人機導航的技術方案。針對精度要求不高、可靠性要求較低的應用,選擇直接法作為無人機導航的技術方案可以在一定程度上降低系統的成本。
在未來的研究中,將進一步分析緊組合情況下的直接法和間接法的性能以及它們在不同場景下的無人機導航中的應用。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36