高壓斷路器機械特性狀態監測系統*
2020-12-26 07:20:16鄧博蘇鷺梅盧超龍林瑞金
科技與創新 2020年24期
鄧博,蘇鷺梅,盧超龍,林瑞金
高壓斷路器機械特性狀態監測系統*
鄧博1,蘇鷺梅1,盧超龍2,林瑞金3
(1.廈門理工學院 電氣工程與自動化學院,福建 廈門 361024;2.廈門國毅科技有限公司,福建 廈門 361006; 3.龍巖市廈龍工程技術研究院,福建 龍巖 364000)
針對目前高壓斷路器機械特性狀態監測系統的研究現狀與不足,為及時發現斷路器的運行狀態,提高可靠性,開發了一套基于DSP的高壓斷路器狀態監測系統。該系統以TMS320C28346為控制核心,將AD7606作為采樣芯片,可實現監測數據的采集、轉換、傳輸和顯示,能夠實時監測斷路器的合分閘線圈電流和觸頭行程。通過實驗測試,結果表明該系統達到了各項參數誤差在2%以下的設計要求。
高壓斷路器;狀態監測系統;DSP;合分閘線圈電流
隨著經濟的高速發展,電能使用量的不斷增加,電網規模越來越大,對電力設備的安全運行提出了更高的要求。高壓斷路器作為電力系統中重要的開關設備,起著控制和保護的作用,能夠保證變電站以及電力系統正常、安全運行[1-2]。在電力系統運行中,如果高壓斷路器發生了故障,輕則設備受損,重則系統解列、用戶大面積的停電,影響正常的社會生活和生產。因此,實時監測斷路器的運行狀態,顯得至關重要。
國外的斷路器監測技術已經成熟,并在斷路器狀態監測上得到了廣泛應用,如德國西門子公司開發的斷路器監測系統及GIS監測子系統,美國Hathway公司開發的BCM200斷路器狀態監測和瑞士ABB集團開發的SF6斷路器狀態監測系統可以監測斷路器的合分閘線圈電流、觸頭行程等狀態量[3-5]。國內對于斷路器狀態監測的研究相對較晚,部分高校對斷路器的運行狀態進行了有效的探索,如清華大學的CBA-1系統和北京航空航天大學的斷路器機械特性測試儀可以監測到合分閘線圈電流信號和振動信號[6-7]。
目前,高壓斷路器狀態監測技術存在以下問題:狀態監測模塊采用高速采集卡,價格過高;部分測試儀監測結果只能現場打印,不能進行長期大量的保存;數據管理軟件不完善,在數據通信上,大多使用RS232通信,隨著監測數據及記錄數據量的增多,傳輸速度變慢,通信時間變長,難以滿足實時性的需要;系統體積過大,便攜性較差。基于此,研究開發了一套高壓斷路器機械特性狀態監測系統。
1 系統總體設計
高壓斷路器狀態監測系統的設計分為硬件設計和軟件設計。硬件設計包括AD7606采樣電路、信號調理電路、U盤存儲電路及RS485通信接口電路等。
系統結構如圖1所示。
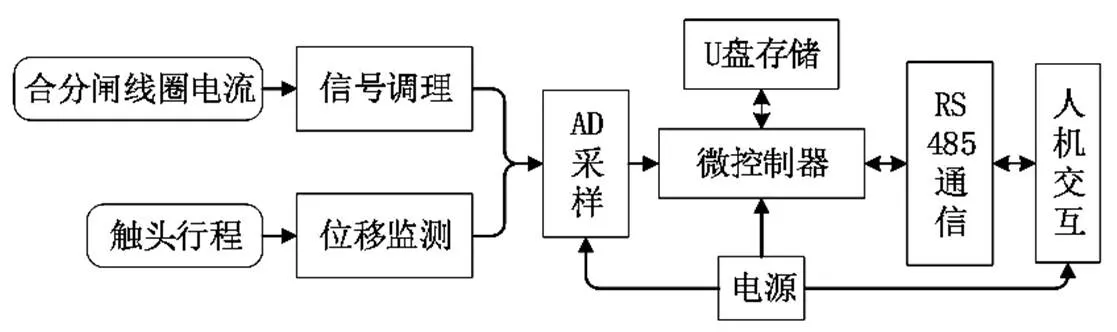
圖1 系統結構框圖
高壓斷路器的合分閘線圈電流信號經霍爾電流傳感器及其信號調理電路將轉換成電壓信號,觸頭行程信號經直線位移傳感器轉換成電壓信號,AD采樣模塊將電壓信號轉變為數字信號,數字信號傳輸至微處理器TMS320C28346并進行計算分析,分析后的數據可保存至U盤,最終通過RS485傳輸到觸摸屏上顯示監測報告。
軟件設計包括主程序、信號采樣程序、U盤存儲程序、MODBUS傳輸程序及觸摸屏程序。上電后,主程序首先初始化,調用信號采樣程序,對數據進行分析,調用存儲程序保存數據,調用MODBUS程序實現數據傳輸,最終調用觸摸屏程序實現顯示。
2 系統硬件設計
2.1 監測模塊
在本次系統設計中DSP選擇TI公司的TMS320C28346,在成本上得到了改善,霍爾電流傳感器選擇CSM010GT,直線位移傳感器選擇TS-0050,觸摸屏選擇tpc7062td。
信號調理模塊的核心CSM010GT型電流傳感器運用霍爾效應閉環原理,能夠快速響應電流信號;測量精度高,副邊電壓的變化可以真實地反映原邊電流的變化;在電隔離條件下,能測量直流、交流、脈沖以及各種不規則波形的電流。
輸入輸出關系為:
out1=in+0(1)
式(1)中:=0.1;0=2.5 V,代表原邊無輸入電流時,理論輸出電壓值為2.5 V。
用于位移監測的TS-0050型直線位移傳感器直接安裝在動觸頭的直線連桿上,可以直接獲得觸頭行程,計算方便,且隨著傳感器技術的發展,其體積日益減小。
位移與電壓關系為:
式(2)中:為電氣量程,52 mm;為電源電壓,10 V。
2.2 AD7606采樣電路
為保證監測信號的采樣精度,系統選用16位的AD7606作為微處理器的外擴采樣芯片,以滿足實時性的需求。AD7606芯片采用單電源供電,8通道同步采樣,且所有通道均能以高達200kSPS的吞吐率采樣,待機時功耗25 mW,運行時功耗100 mW,具有速度高、功耗低的特點,具有高輸入阻抗和片內濾波,可以改善信噪比。
采樣電路如圖2所示。
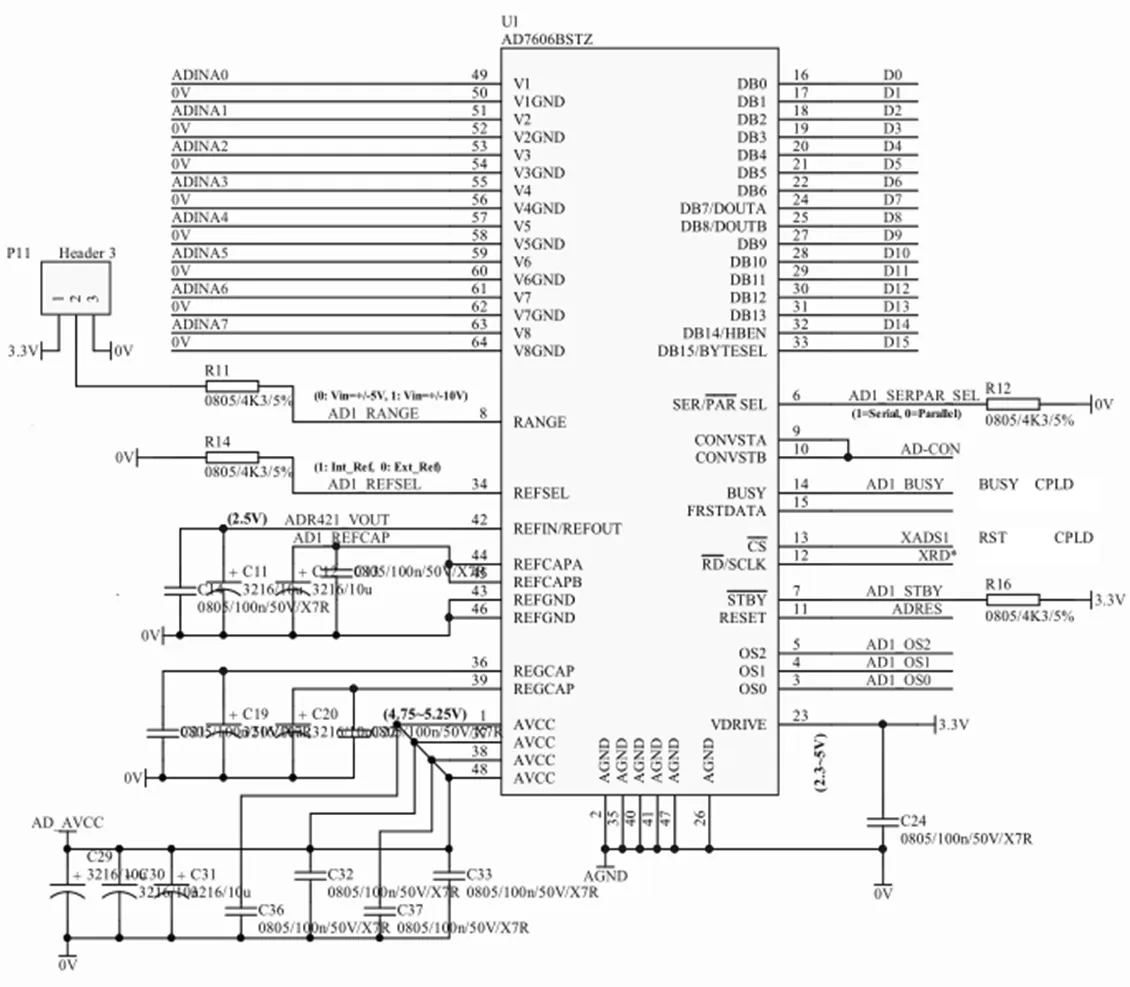
圖2 AD7606采樣電路
引腳ADINA1~ADINA3分別是合閘線圈電流信號、分閘線圈電流信號和觸頭行程信號的輸入端;引腳AD1_RANGE用來選擇采樣量程,通過P11選擇-10~10 V量程;數字信號輸出端引腳D0~D15,連接微處理器TMS30C28346的數據總線引腳XD0~XD15;引腳CONVST和BUSY接微處理器的GPIO14、GPIO15,當引腳CONVST從低電平向高電平轉換時,其上升沿變化啟動AD采樣,同時引腳BUSY變成高電平,采樣結束后,引腳BUSY變為低電平,微處理器TMS320C28346開始讀取輸出寄存器中的數據。
AD7606轉換公式如下:
式(3)中:out為經調理電路或直線位移傳感器轉換后的輸出電壓;為AD芯片采樣結果;=10 V,為采樣量程。
2.3 信號調理電路
高壓斷路器的合分閘線圈電流大小一般在0~5 A。由于監測到的電流信號較弱,需要信號調理電路實現對信號的放大處理才能夠實現狀態量的監測。
信號調理電路如圖3所示。
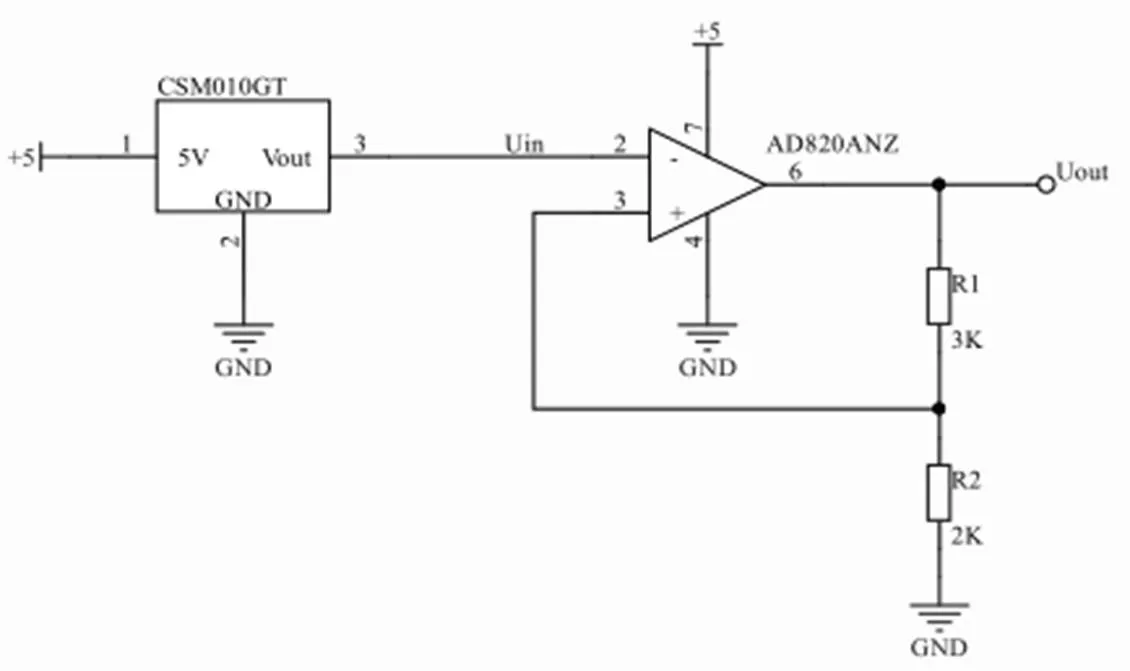
圖3 信號調理電路原理圖
轉換公式如下:
2.4 U盤存儲電路
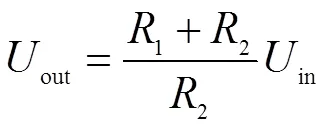
高壓斷路器狀態監測系統實時采集了多種狀態量,能夠將電流信號、行程信號的全部信息存儲記錄下來,便于后續分析。本系統選用文件控制管理芯片CH376S,實現對U盤的讀寫。U盤存儲電路原理如圖4所示。
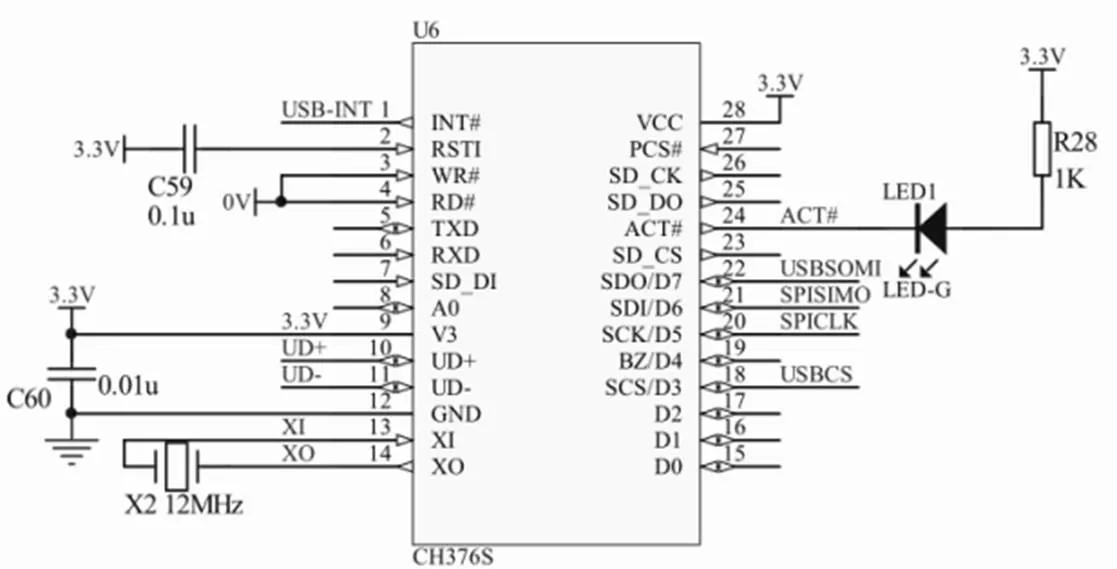
圖4 U盤存儲電路原理圖
2.5 RS485通信接口電路
微處理器與觸摸屏之間無法通信,需要通過物理層總線實現。微處理器TMS320C28346集成了通信模塊,2個通信接口都是復用的,可通過跳線選擇RS232總線或RS485總線;觸摸屏可通過設置COM口選擇RS242或RS485。RS232總線在數據傳輸時容易掉包,且數據量大時無法滿足實時性的要求,因此采用跳線選擇RS485通信接口。
RS485通信電路如圖5所示。
圖5 RS485通信電路原理圖
3 系統軟件設計
高壓斷路器狀態監測系統的軟件設計包括主程序、AD采樣子程序、U盤存儲子程序、MODBUS傳輸子程序以及觸摸屏程序。
上電后,系統初始化,調用AD采樣子程序,不間斷地實時采集電流信號和行程信號;調用U盤存儲子程序,將監測數據存于U盤中;調用MODBUS傳輸子程序,將相關狀態量參數傳輸至觸摸屏;用戶可在觸摸屏上選擇顯示監測報告、截屏打印、保存數據等功能,實現了友好的人機交互。
主程序流程如圖6所示。
4 實驗結果分析
搭建軟硬件平臺,調試高壓斷路器狀態監測系統。以ABB的VD4真空斷路器為監測對象,對其合分閘線圈電流和觸頭行程進行實時監測。測試結果與廈門國毅科技有限公司的GYT-07(精度為0.5%)機械特性測試儀的監測數據進行對比,驗證該系統監測數據的準確性。重復進行合分閘操作,共50次,記錄數據,任意選取其中的10組測試數據。合閘報告、分閘報告如表1、表2 所示。
其中,誤差計算公式為:

表1 合閘報告
合閘操作次數12345678910 電流峰值/A本系統1.1101.1211.1241.1131.1211.1201.1161.1201.1151.116 GYT-071.1041.1031.1051.1061.1041.1071.1051.1041.1081.103 誤差/(%)0.541.631.720.631.541.171.001.450.631.18 合閘時間/ms本系統58.258.358.458.358.358.458.358.458.558.5 GYT-0758.458.558.658.458.258.358.158.758.658.4 誤差/(%)0.340.340.340.170.170.170.340.510.170.17 觸頭行程/mm本系統13.9614.0714.0313.9214.0914.0214.0613.9314.0514.01 GYT-0714.1514.4114.1914.2614.2814.2914.3714.2114.3214.26 誤差/(%)1.341.681.131.971.331.891.881.971.891.75 觸頭開距/mm本系統11.5311.4811.3711.5411.4611.5211.5311.4811.4411.56 GYT-0711.7211.5611.5311.4111.6011.6311.4211.6111.5811.77 誤差/(%)1.620.691.391.141.210.950.961.121.211.78 合閘速度/(m·s-1)本系統1.0711.0721.0761.0741.0781.0731.0721.0751.0731.076 GYT-071.0631.0641.0631.0621.0651.0651.0631.0621.0611.063 誤差/(%)0.750.751.221.131.220.750.851.221.131.22
表2 分閘報告
分閘操作次數12345678910 電流峰值/A本系統0.9060.9030.9130.9220.9210.9080.9260.9150.9130.917 GYT-070.8980.8960.9090.9120.9080.8970.9180.9030.9070.912 誤差/(%)0.890.780.441.101.431.230.871.330.660.55 分閘時間/ms本系統47.247.347.247.146.947.247.147.247.147.0 GYT-0747.347.547.447.347.447.547.347.447.447.3 誤差/(%)0.210.420.420.421.050.630.420.420.630.63 觸頭行程/mm本系統14.2614.2814.2214.3314.4114.3614.3714.3314.2614.31 GYT-0714.0214.1614.0714.2614.1314.1514.1814.0814.1214.23 誤差/(%)1.710.851.070.491.981.481.341.780.990.56
表2(續)

分閘操作次數12345678910 觸頭開距/mm本系統11.7411.8211.7811.6111.8511.8011.6311.8311.8611.75 GYT-0711.5611.6411.5811.6911.7311.5711.5911.6511.6311.88 誤差/(%)1.561.551.900.681.021.990.351.551.981.09 分閘速度/(m·s-1)本系統0.8930.9010.8830.8710.8820.8710.8840.8820.8920.885 GYT-070.8780.8870.8670.8580.8690.8590.8690.8680.8770.872 誤差/(%)1.711.581.851.521.501.401.731.611.711.49
通過高壓斷路器狀態監測系統和GYT-07機械特性測試儀對VD4高壓真空斷路器正常運行時進行的多組測試,監測結果如表3所示,各參數誤差最大值如表4所示。
實驗結果表明:①高壓斷路器監測系統能夠很好地監測到合分閘時間,且誤差較小,基本在1%以內,這是因為微處理器有快速響應和處理的功能;②合分閘線圈電流的峰值誤差在1%~2%之間,由于進入霍爾電流傳感器的電流是通過斷路器合分閘線圈電流的二次電流引出,通常存在微弱的電磁干擾,造成了監測電流值的輕微浮動;③合分閘時的觸頭行程及開距誤差大部分在1.5%~2%,由于高壓斷路器在運行過程中,會產生機身振動,對安裝在動觸頭直線連桿上的直線位移傳感器造成一定的測量影響,使得行程監測數值的變化幅度大,進一步導致了合分閘速度有1.5%~2%的 誤差。
表3 高壓斷路器特性參數
合閘電流峰值/A合閘時間/ms合閘觸頭行程/mm合閘觸頭開距/mm合閘速度/(m·s-1) 1.110~1.12458.2~58.513.9~14.0911.37~11.561.071~1.078 分閘電流峰值/A分閘時間/ms分閘觸頭行程/mm分閘觸頭開距/mm分閘速度/(m·s-1) 0.903~0.92646.9~47.314.2~14.4111.6~11.850.871~0.901
表4 參數誤差
合閘參數電流峰值/A合閘時間/ms觸頭行程/mm觸頭開距/mm合閘速度/(m·s-1) 最大誤差/(%)1.720.511.971.781.22 分閘參數電流峰值/A分閘時間/ms觸頭行程/mm觸頭開距/mm分閘速度/(m·s-1) 最大誤差/(%)1.431.051.981.991.85
高壓斷路器監測系統監測到的合、分閘線圈電流信號及觸頭行程信號波形如圖7所示,均符合典型波形。
結果表明,該系統監測到的高壓斷路器機械特性參數在一定范圍內變化,與GYT-07機械特性測試儀相比,誤差低于2%,達到了預期要求,且電流波形、行程波形均不失真,效果較好,實用性強。
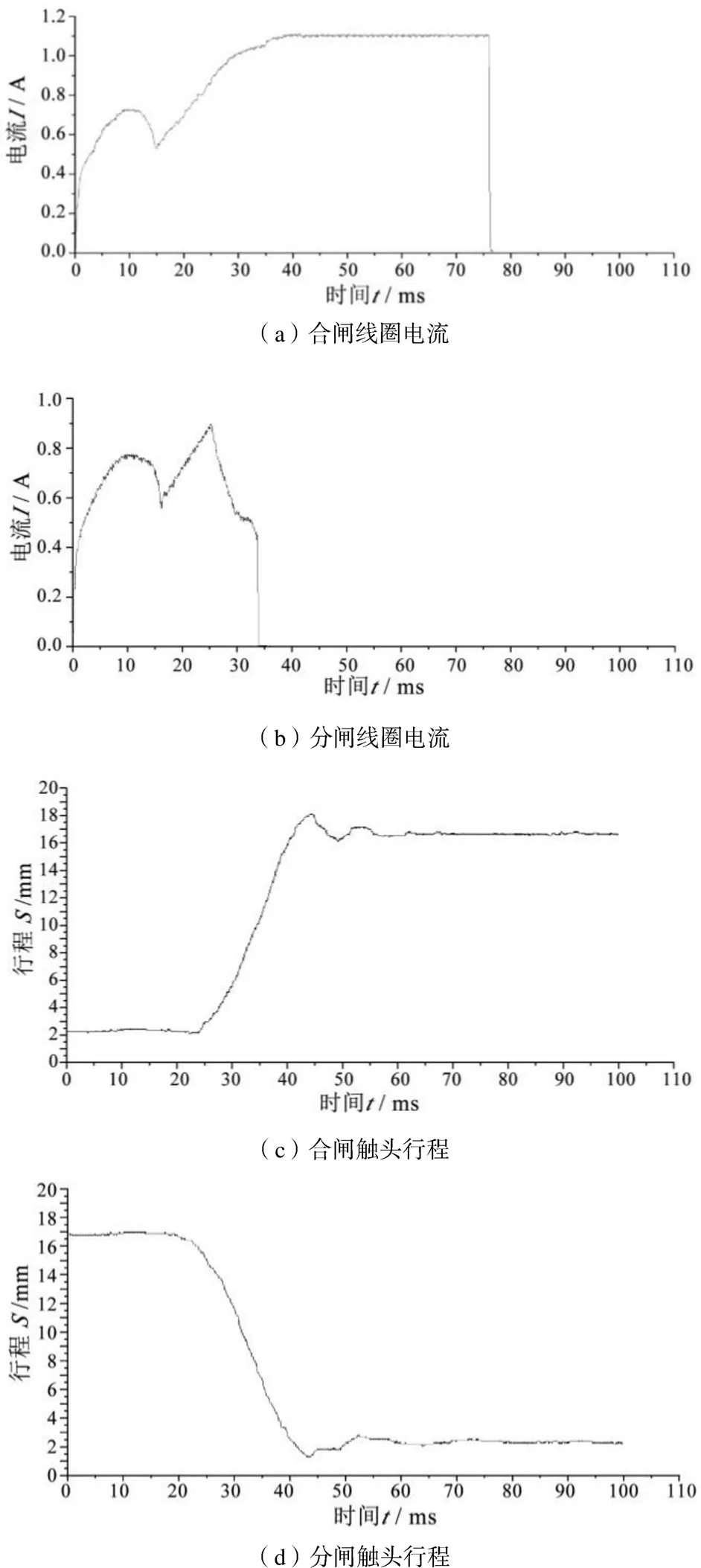
圖7 合分閘線圈電流、觸頭行程波形圖
5 結語
電網的智能化是目前電網的發展方向,現有斷路器監測系統大多采用高速采集卡,成本高、實時性差,所以本文設計開發了一套基于DSP的高壓斷路器機械特性狀態監測系統。該系統集實時采集、數據轉換處理、數據圖形顯示、數
據存儲于一體,能夠實時監測到高壓斷路器的合分閘電流和觸頭行程,且各項參數最大誤差均在2%以下,監測系統體積夠小,便攜性好。在實際運行中,驗證了該系統具有實時性好、精確度高、抗干擾能力強等優點,具有較高的實用性。
[1]林莘.現代高壓電器技術[M].北京:機械工業出版社,2002:35-50.
[2]田惠川.變電站智能斷路器機械特性在線監測技術的研究[J].機械管理開發,2018(8):93-95.
[3]POELTL A,HAINES M.Experiences with condition monitoring of HV circuit breakers,transmission and distribution conference and exposition[C]//Atlanta,GA:IEEE/PES,2001:1077-1082.
[4]CLEGG B,EWART G,BRANKIN F. Advances in circuit breaker testing and condition monitoring[C]//IEEE Colloguium on Monitors and Condition Assessment Equipment,1996:711-721.
[5]BALGARD L,LUNDIN L.Monitoring of primary circuit breaker temperatures and breaker condition in a substation[R]. ABB review,1993.
[6]黃瑜瓏,王伯翰,錢佳驪.一種高壓斷路器微機檢測系統[J].高壓電器,1995(6):58-60.
[7]HUANG J,JIANG X F,HU X G.Automated monitoring and analysis for high voltage circuit reaker[C]//Industrial Electronics and Applications(ICIEA),2010 the 5th IEEE Conference on.IEEE,2010:560-564.
2095-6835(2020)24-0022-04
TM561
A
10.15913/j.cnki.kjycx.2020.24.007
鄧博(1995—),男,研究生,研究方向為電器智能化技術及應用。
*項目: 2019年福建省龍巖市科技計劃項目資助(編號:2019LYF7004)
〔編輯:王霞〕
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
