分布式驅(qū)動電動汽車轉(zhuǎn)矩分配策略綜述
2020-12-15 07:00:46黃亞東郭桂芳
汽車實用技術(shù) 2020年22期
黃亞東 郭桂芳
摘 要:分布式驅(qū)動電動汽車的主要結(jié)構(gòu)特征是將驅(qū)動電動機直接安裝在驅(qū)動輪內(nèi)或驅(qū)動輪附近,具有驅(qū)動傳動鏈短、傳動高效、結(jié)構(gòu)緊湊等突出優(yōu)點。電機獨立驅(qū)動的優(yōu)勢使得每個電機能夠?qū)崿F(xiàn)精確控制,為提升分布式驅(qū)動電動汽車地盤動力學(xué)以及全線控技術(shù)提供了巨大優(yōu)勢基礎(chǔ)。從電子差速技術(shù)和橫向穩(wěn)定性兩方面的研究進展進行綜述,介紹這兩方面技術(shù)中所涉及到的驅(qū)動電機轉(zhuǎn)矩分配技術(shù)和分配的方式,以及控制過程中所使用的算法。并對分布式驅(qū)動電動汽車轉(zhuǎn)矩分配策略的研究方向做幾點展望。
關(guān)鍵詞:分布式驅(qū)動電動汽車;電子差速技術(shù);橫向穩(wěn)定性;轉(zhuǎn)矩分配
中圖分類號:U469.72? 文獻標識碼:A? 文章編號:1671-7988(2020)22-230-08
Abstract: The main structural feature of distributed drive electric vehicles is that the drive motor is directly installed in or near the drive wheel, which has the outstanding advantages of short drive transmission chain, high transmission efficiency, and compact structure. The advantages of independent driving of motors enable each motor to achieve precise control, which provides a huge advantage foundation for improving the dynamics of distributed driving electric vehicles and the full line control technology. This paper summarizes the research progress of electronic differential speed and lateral stability, introduces the torque distribution technology and distribution method of the drive motor involved in these two technologies, and the algorithm used in the control process. And some prospects for the research direction of distributed drive electric vehicle torque distribution strategy.
Keywords: Distributed drive electric vehicle; Electronic differential technology; Lateral stability; Torque distribution
CLC NO.: U469.72? Document Code: A? Article ID: 1671-7988(2020)22-230-08
前言
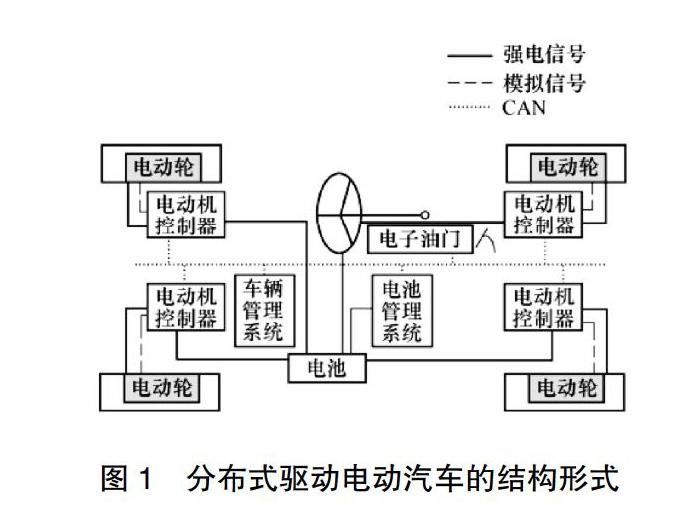
能源危機和環(huán)境污染兩大問題,使得電動汽車逐漸成為研究熱點。電動汽車主要有兩種結(jié)構(gòu),分別由傳統(tǒng)的燃油汽車改造或是重新設(shè)計而來,類似于傳動燃油車結(jié)構(gòu)的電動汽車為單電機集中式驅(qū)動的結(jié)構(gòu),適應(yīng)于電動汽車的另外一種結(jié)構(gòu)則是多電機分布式驅(qū)動的結(jié)構(gòu)。隨著對電動汽車的深入研究,分布式驅(qū)動電動汽車開始備受關(guān)注。如圖1所示。分布式驅(qū)動電動汽車是將2個及以上的安裝在驅(qū)動輪內(nèi)的電機(輪轂電機)或者安裝在驅(qū)動輪附近的電機(輪邊電機)作為驅(qū)動源,實現(xiàn)獨立驅(qū)動的電動汽車。分布式驅(qū)動電動汽車具有驅(qū)動傳動鏈短、傳動效率高、結(jié)構(gòu)緊湊等突出優(yōu)點,為車輛底盤的智能全線控技術(shù)以及動力學(xué)控制技術(shù)提供了廣闊的前景。[1]對分布式驅(qū)動電動汽車的電機轉(zhuǎn)矩分配策略進行研究,能充分利用電機獨立驅(qū)動的優(yōu)勢,對電動汽車電子差速技術(shù)的研究和改善車輛的橫向穩(wěn)定性、安全性具有重大意義。
1 分布式驅(qū)動電動汽車的優(yōu)勢
與傳統(tǒng)的集中式驅(qū)動電動汽車相比,分布式驅(qū)動電動汽車最大的區(qū)別在于其各個驅(qū)動輪可以實現(xiàn)單獨的驅(qū)動和制動。因此,它的優(yōu)勢主要體現(xiàn)在:通過優(yōu)化控制的方式能夠?qū)崿F(xiàn)電機轉(zhuǎn)矩的最優(yōu)的驅(qū)/制動力分配方式;將機械連接方式轉(zhuǎn)化為電氣連接的方式便于實現(xiàn)靈活的車輛底盤布置和實現(xiàn)車輛的一體化控制;多電機的控制使用能夠提高車輛在部分驅(qū)動電機失效情況下的可靠性。除此之外,還有如下優(yōu)勢:
1)路面附著利用率高:通過輪轂、輪邊電機實現(xiàn)多輪獨立驅(qū)動,路面附著利用率高。
2)模塊化與總布置便捷:電驅(qū)動系統(tǒng)移至輪內(nèi),為整車空間布置創(chuàng)造了有利條件,易實現(xiàn)模塊化設(shè)計。
3)扭矩矢量控制靈活:通過對每個驅(qū)動電機的反饋控制,能夠?qū)崿F(xiàn)精確的驅(qū)動防滑、橫擺穩(wěn)定性控制等主動控制功能。[2][3]
2 分布式電動汽車轉(zhuǎn)矩分配技術(shù)
相對于集中式驅(qū)動電動汽車,分布式驅(qū)動電動汽車的4個車輪的轉(zhuǎn)矩均能獨立控制,在其能力范圍內(nèi)轉(zhuǎn)矩可按照任意比例分配[4],使得電機工作在高效區(qū)來減小能耗,同時實現(xiàn)車輛操縱穩(wěn)定性和平順性的改善。
在涉及到轉(zhuǎn)矩分配的問題上,主要包含分布式驅(qū)動電動汽車電子差速控制技術(shù)和橫向穩(wěn)定性控制兩個方面。一般來說,采用輪轂電機驅(qū)動是分布式驅(qū)動電動汽車的主要驅(qū)動形式,它取消了傳統(tǒng)燃油車上的機械式差速器,而且驅(qū)動轉(zhuǎn)矩由每個車輪獨立產(chǎn)生,轉(zhuǎn)矩的失調(diào)可能會加劇輪胎磨損或造成車輛橫向失穩(wěn),因此需要電子差速控制來協(xié)調(diào)各車輪的轉(zhuǎn)矩,實現(xiàn)傳統(tǒng)汽車中機械差速器的功能。因此,通過合理地分配電機轉(zhuǎn)矩,能夠有效地實現(xiàn)車輛轉(zhuǎn)彎時的差速控制,是輪轂電機驅(qū)動電動汽車研究的重點和難點。
同時,分布式驅(qū)動電動汽車在高速轉(zhuǎn)向行駛時也需要協(xié)調(diào)車輪的轉(zhuǎn)速或轉(zhuǎn)矩,不僅是為了避免輪胎磨損,還要避免側(cè)滑、甩尾、激轉(zhuǎn)等橫向失穩(wěn)事故。鑒于此,分布式電動汽車的獨立驅(qū)動的特點使得電動汽車在提高穩(wěn)定性和減小能耗方面具有令人矚目的潛力。
3 電子差速控制中的轉(zhuǎn)矩分配
3.1 電子差速技術(shù)
當車輛轉(zhuǎn)彎行駛時,內(nèi)輪和外輪有不同的速度以防止不穩(wěn)定的驅(qū)動,傳統(tǒng)的車輛能夠通過機械差速器實現(xiàn)這個功能。分布式獨立驅(qū)動電動汽車的驅(qū)動電機直接安裝在輪輞內(nèi)或其附近,由于各電動輪之間無機械連接,驅(qū)動電機可有效地獨立調(diào)節(jié)控制,故可通過電子差速控制系統(tǒng)使內(nèi)、外側(cè)電動輪轉(zhuǎn)速滿足轉(zhuǎn)向行駛時的差速要求,從而省去結(jié)構(gòu)復(fù)雜的機械差速器[5]。對于分布式電動車的差速設(shè)計,完全擺脫了目前機械差速器的技術(shù)路線和機械設(shè)計的束縛,差速功能主要由軟件完成,即電子差速控制。[6]
電子差速控制可以根據(jù)轉(zhuǎn)彎條件對左右驅(qū)動輪輸入不同的轉(zhuǎn)矩,從轉(zhuǎn)彎時的控制響應(yīng)特性看,希望車輛獲得更大的加速度或減速度、更大的向心加速度和車體質(zhì)心偏離角以及更小的瞬時轉(zhuǎn)彎半徑;從轉(zhuǎn)彎行駛的操縱性能看,希望差速控制算法能有更多考慮,及時避免可能導(dǎo)致的不安全傾向,使得駕駛更安全平穩(wěn);此外,輪式驅(qū)動電動車由于免去了機械傳動機構(gòu)的損耗和延時效應(yīng),系統(tǒng)將具有更快的響應(yīng)特性和更高的效率。[7]
根據(jù)控制電機的方式,實現(xiàn)電子差速的方式基本分為兩種:一是基于轉(zhuǎn)速的電子差速控制策略,二是基于轉(zhuǎn)矩的電子差速控制策略。前者主要是參考Ackermann轉(zhuǎn)向模型的幾何關(guān)系,確定各個驅(qū)動輪所需轉(zhuǎn)速,并通過閉環(huán)控制實現(xiàn)轉(zhuǎn)矩分配,跟蹤理想車速的目的;后者是對輪轂電機采用直接轉(zhuǎn)矩控制,將滑移率、質(zhì)心側(cè)偏角、橫擺角速度的擾動值分別、部分或全部作為控制變量,以最大限度抑制這些擾動為目標調(diào)整電機電樞電流、實現(xiàn)各輪轂電機協(xié)同轉(zhuǎn)矩控制。[8]
3.2 基于轉(zhuǎn)矩控制的電子差速力矩分配
機械差速器的運動規(guī)律是:無論轉(zhuǎn)彎行駛或直線行駛,兩側(cè)驅(qū)動車輪的轉(zhuǎn)速之和始終等于差速器殼轉(zhuǎn)速的2倍。常用的對稱式錐齒輪差速器,其內(nèi)摩擦力矩很小,實際上可以認為無論左右驅(qū)動輪轉(zhuǎn)速是否相等,兩邊扭矩總是平均分配,這樣的分配比例對于車輛在良好路面上直線或轉(zhuǎn)彎行駛時,其運行狀態(tài)都是滿意的,但是車輛行駛工況復(fù)雜多變,至今還沒有哪一種差速器可以滿足所有路況下的功能要求。[9]
]研究了四輪馬達獨立驅(qū)動車輛的全輪轉(zhuǎn)向控制策略。提出了一種基于神經(jīng)網(wǎng)絡(luò)PID電子差動的速度和轉(zhuǎn)矩綜合控制策略,用于四輪目標轉(zhuǎn)速的計算。采用四個PID控制器在四個輪轂電機上實現(xiàn)轉(zhuǎn)矩分配,并且實現(xiàn)電子差速轉(zhuǎn)向。在不同參考轉(zhuǎn)向角度和速度下的仿真結(jié)果表明,該策略可以提高車輛低速轉(zhuǎn)向的操縱性和穩(wěn)定性。
提出了一種高效、魯棒的電動汽車電子差動系統(tǒng)控制方案。系統(tǒng)由兩個無刷直流電機組成,采用反電動勢過零檢測方法對電機進行控制,保證電動汽車的兩個后輪的驅(qū)動。電子差動控制器(EDC)保證最大轉(zhuǎn)矩,可以獨立控制驅(qū)動輪在任意曲線上以不同的速度轉(zhuǎn)彎,也可以根據(jù)轉(zhuǎn)向角度將動力分配給每臺電機。實驗表明:該方案具有令人滿意的性能,并保證了車輛在所有道路條件下的穩(wěn)定性。
介紹了一種用于后輪驅(qū)動、兩個電機驅(qū)動的電動汽車的電子差速器。所提出的架構(gòu)包括通過簡單的電機轉(zhuǎn)矩控制器來驅(qū)動兩個電機,通過平分每個電機的轉(zhuǎn)矩。其原理與機械微分相似。其目的是提高電動汽車的傳動系統(tǒng)效率,從而提高車輛的行駛里程。
提出了轉(zhuǎn)向時驅(qū)動電機等轉(zhuǎn)矩分配的自適應(yīng)電子差速策略;基于Simulink和Carsim建立的分布式驅(qū)動電動汽車聯(lián)合仿真平臺,對比分析了不同轉(zhuǎn)向行駛工況時等轉(zhuǎn)矩分配電子差速策略的分布式驅(qū)動電動汽車和開放式機械差速器的集中式驅(qū)動電動汽車的差速性能以及操縱穩(wěn)定性。仿真結(jié)果表明,兩種驅(qū)動方式電動汽車的差速性能相同,相比于集中式驅(qū)動電動汽車的轉(zhuǎn)向操縱穩(wěn)定性,分布式驅(qū)動電動汽車轉(zhuǎn)向操縱穩(wěn)定性稍差。
針對后輪獨立驅(qū)動電動輪汽車轉(zhuǎn)向差速控制技術(shù),在研究車輛轉(zhuǎn)向過程中,車輛控制系統(tǒng)采集油門踏板信號,給出相應(yīng)的總驅(qū)動力矩,結(jié)合采集到的方向盤轉(zhuǎn)角和車速信號,計算出兩側(cè)驅(qū)動輪的轉(zhuǎn)矩。通過增大外側(cè)驅(qū)動輪轉(zhuǎn)矩和減少內(nèi)側(cè)驅(qū)動輪轉(zhuǎn)矩的方式實現(xiàn)力矩分配,不僅實現(xiàn)了電子差速功能,還合理分配了驅(qū)動輪轉(zhuǎn)矩,產(chǎn)生正橫擺力偶矩,從而對車輛轉(zhuǎn)向起到輔助作用。
以上文獻主要通過平均分配、轉(zhuǎn)矩差分配或轉(zhuǎn)向角分配的方式對電子差速技術(shù)上的驅(qū)動輪力矩分配。較好的分配方式還是以車輛轉(zhuǎn)彎時的橫擺角速度和質(zhì)心側(cè)偏角的擾動值為控制變量和保證滑移率最佳作為電子差速進行轉(zhuǎn)矩分配的依據(jù)。
為實現(xiàn)輪轂電機驅(qū)動的純電動汽車的差速穩(wěn)定轉(zhuǎn)向,在低速時設(shè)計了基于阿克曼轉(zhuǎn)向模型的速度控制器,實現(xiàn)轉(zhuǎn)彎時對理想車速的差速速度跟隨;高速時設(shè)計了基于理想橫擺角速度和質(zhì)心側(cè)偏角的PID理想橫擺力矩控制器,通過橫擺角速度誤差和質(zhì)心側(cè)偏角誤差產(chǎn)生的橫擺力矩被分配到每個驅(qū)動輪,實現(xiàn)轉(zhuǎn)彎時的四輪力矩合理分配。并通過仿真實驗證明了控制策略的可行性和合理性。
針對輪轂式電動汽車在轉(zhuǎn)彎時存在驅(qū)動輪相對滑移率受外界干擾大的問題,提出一種基于相對滑移率的電動汽車電子差速控制方法,設(shè)計了基于最優(yōu)控制和滑模控制的線性二次型最優(yōu)滑模控制器。采用前輪轉(zhuǎn)向后輪驅(qū)動的輪轂式電動汽車作為研究對象,通過控制汽車的轉(zhuǎn)矩協(xié)調(diào)百分比來控制驅(qū)動輪的輸出轉(zhuǎn)矩,從而控制了驅(qū)動輪的相對滑移率。仿真結(jié)果表明,該控制方法實現(xiàn)了車輛在轉(zhuǎn)彎過程中驅(qū)動輪的相對滑移率最小,且提高了電子差速系統(tǒng)的抗干擾能力,有效地增強了系統(tǒng)的魯棒穩(wěn)定性,提高了車輛的行駛安全性。
對后輪轂電機驅(qū)動電動汽車的電子差速控制策略進行研究,提出了一種基于滑轉(zhuǎn)率控制的 P-模糊 PID 雙模態(tài)控制方法,建立了整車動力學(xué)模型和電機模型,設(shè)計了P-模糊PID 控制器,降低電動汽車兩側(cè)車輪的滑轉(zhuǎn)率,并趨于理想值。仿真對比了常規(guī)的模糊控制方法,結(jié)果表明,系統(tǒng)動態(tài)響應(yīng)速度提高,并且沒有超調(diào),提升了電動汽車的動力學(xué)特性,尤其是在低附著系數(shù)路面上的轉(zhuǎn)向及加速行駛時的控制效果更為明顯。
改進了傳統(tǒng)僅以滑移率作為轉(zhuǎn)矩分配依據(jù)的控制方法,采用更加主動的預(yù)分配與補償分配相結(jié)合的控制方法,改善了汽車的轉(zhuǎn)向穩(wěn)定性、舒適性和安全性。轉(zhuǎn)矩預(yù)分配模型根據(jù)車輛參數(shù)計算出各輪垂向載荷與整車質(zhì)量的比值并以此為依據(jù)對各輪驅(qū)動轉(zhuǎn)矩進行預(yù)分配并輸送給轉(zhuǎn)矩補償控制器,轉(zhuǎn)矩補償控制器根據(jù)汽車各輪反饋的實際滑移率與路面識別控制器估算出的該路面下的最優(yōu)滑移率的差值計算出各輪需要補償?shù)霓D(zhuǎn)矩,與預(yù)分配控制器得到的轉(zhuǎn)矩相加后一起輸送給輪轂電機;由于電機執(zhí)行目標轉(zhuǎn)矩信號時會有延遲和誤差,這里將輪轂電機輸出的實際轉(zhuǎn)矩反饋到電機控制信號的輸入端與轉(zhuǎn)矩補償控制器的輸出目標轉(zhuǎn)矩比較,由 PID 控制器進一步優(yōu)化控制效果。
除了以上轉(zhuǎn)矩分配策略外,近年來優(yōu)化控制的分配方式也成為了轉(zhuǎn)矩分配中主要考慮的問題。
為了提高車輛的操縱性和降低能耗,提出了一種基于多目標優(yōu)化的車輪扭矩分配策略。在高層方法中,由于模型誤差和參數(shù)誤差,采用滑模控制來計算所需的偏航力矩。底層采用由偏航力矩控制偏置、驅(qū)動系統(tǒng)能量損失和轉(zhuǎn)差率約束組成的懲罰函數(shù)進行車輪轉(zhuǎn)矩控制分配的數(shù)學(xué)規(guī)劃。為降低計算成本,將離線優(yōu)化和在線優(yōu)化相結(jié)合進行編程,并將優(yōu)化結(jié)果作為轉(zhuǎn)矩命令發(fā)送給電機控制器。基于MATLAB和Carsim的協(xié)同仿真表明,所開發(fā)的策略既能提高車輛的可操作性,又能降低能耗。
針對分布式驅(qū)動電動汽車轉(zhuǎn)彎工況轉(zhuǎn)矩優(yōu)化分配問題,建立了永磁同步電機的效率優(yōu)化模型,并提出了基于模型的轉(zhuǎn)彎工況下效率最優(yōu)的轉(zhuǎn)矩分配算法,實現(xiàn)了轉(zhuǎn)彎時轉(zhuǎn)矩分配的問題,同時實現(xiàn)了電子差速問題。仿真結(jié)果表明:轉(zhuǎn)彎工況下的能效優(yōu)化效果與轉(zhuǎn)向角成正比。基于提出的優(yōu)化算法,分布式驅(qū)動電動轎車最大轉(zhuǎn)向角下的能效提升效果可達2.5%。
廈門金龍客車蘇亮[21]針對某型分布式驅(qū)動電動客車以經(jīng)濟性指標,節(jié)能控制為目標,對驅(qū)動扭矩分配控制策略進行優(yōu)化。首先根據(jù)油門踏板,制動踏板和車速計算出電機需求驅(qū)制動扭矩。在驅(qū)動模式下,將需求扭矩與電機允許最大扭矩值相除,得到負荷率系數(shù),若該系數(shù)大于預(yù)定義的閾值,則進入四輪驅(qū)動模式,電機根據(jù)扭矩分配系數(shù)進行驅(qū)動扭矩的分配;若該系數(shù)小于閾值,則進入后輪驅(qū)動模式。在制動模式下,采用以上同樣原理。其中閾值與扭矩分配系數(shù)是以節(jié)能為控制目標,使用多島遺傳算法進行優(yōu)化的變量。
根據(jù)車速和穩(wěn)定性參數(shù)制定了適應(yīng)車速變化的四輪轉(zhuǎn)矩分配策略。在低速時,為改善轉(zhuǎn)向機動性能,依據(jù)阿克曼轉(zhuǎn)向關(guān)系,以參考車輪轉(zhuǎn)速為控制目標,通過調(diào)節(jié)兩側(cè)車輪驅(qū)動轉(zhuǎn)矩達到跟蹤理想車輪轉(zhuǎn)速的目的,實現(xiàn)驅(qū)動輪的主動差速;在高速時,為提高車輛轉(zhuǎn)向行駛的穩(wěn)定性,通過二次規(guī)劃方法優(yōu)化分配各車輪驅(qū)動力矩,分析輪胎縱橫向附著裕度建立目標函數(shù),并加入附加橫擺力矩和路面附著力的限制,進行車輪驅(qū)動轉(zhuǎn)矩的在線優(yōu)化分配。
為了提高四輪式獨立驅(qū)動電動汽車在具有不同附著系數(shù)的道路上(例如在聯(lián)合道路和?分割道路上)的轉(zhuǎn)向穩(wěn)定性,提出了一種分層電子轉(zhuǎn)向控制策略。上層控制器基于道路附著力的影響,在直接偏航力矩控制中實現(xiàn)了質(zhì)心側(cè)偏角和側(cè)滑角的自適應(yīng)控制。下層控制器設(shè)計為雙層次結(jié)構(gòu),可以根據(jù)道路附著系數(shù)自適應(yīng)地改變扭矩分配算法,并實現(xiàn)每個車輪扭矩的不同權(quán)重控制。在RT-LAB測試平臺和實時汽車測試中進行的實時仿真結(jié)果表明,在附著系數(shù)變化的道路上,四輪式獨立驅(qū)動電動汽車的轉(zhuǎn)向穩(wěn)定性得到了改善。特別是在聯(lián)合路和分岔路上進行的“雙變道”測試,與普通控制策略相比,質(zhì)心側(cè)偏角誤差降低高達55.1%,各輪內(nèi)電機的輸出轉(zhuǎn)矩及其波動明顯減小。
4 橫向穩(wěn)定性中的轉(zhuǎn)矩分配
分布式驅(qū)動電動汽車橫向穩(wěn)定性屬于汽車操縱動力學(xué)問題,主要與輪胎側(cè)向力有關(guān)。當分布式電動汽車在高速過彎、變道以及在地面附著條件惡劣的情況下轉(zhuǎn)向行駛時,會發(fā)生側(cè)滑、急轉(zhuǎn)和側(cè)翻等失穩(wěn)的危險工況,為解決橫向穩(wěn)定性問題,分布式電動汽車的橫向穩(wěn)定性控制技術(shù)在國內(nèi)外各大高校和研究機構(gòu)得到廣泛的關(guān)注和研究。[24][25]
橫向穩(wěn)定性問題指的是車輛在轉(zhuǎn)向過程中由側(cè)向力引起的傾覆和側(cè)滑等失穩(wěn)現(xiàn)象。其次,由于分布式驅(qū)動電動汽車每個輪轂電機獨立可控,通過合理分配各驅(qū)動輪的驅(qū)、制動力,可實現(xiàn)橫向穩(wěn)定性控制[26][27][28][36]。因此,通過研究控制過程中的力矩分配策略有利于橫向穩(wěn)定性的實現(xiàn)。
分布式驅(qū)動電動汽車的橫向穩(wěn)定性控制一般采用分層控制結(jié)構(gòu),包括頂層的信號采集層、中層的直接橫擺力矩決策層和底層的車輪轉(zhuǎn)矩分配層,其中,信號采集層主要通過傳感器實時采集車輛狀態(tài)參數(shù);直接橫擺力矩決策策略可以采用模糊控制、PID控制等不基于模型的控制算法,以及滑模控制、LQR控制、H∞魯棒控制等基于模型的控制算法。針對車輪轉(zhuǎn)矩分配層,學(xué)者們也深入開展了轉(zhuǎn)矩分配策略的研究。
湖南大學(xué)袁希文等人[29]提出了一種考慮側(cè)向穩(wěn)定性的電液復(fù)合制動滑移率控制策略,通過主動前輪轉(zhuǎn)向系統(tǒng)來補償制動過程中車輛的側(cè)向穩(wěn)定性,再利用滑模極值搜算法設(shè)計滑移率控制器。電液扭矩協(xié)調(diào)控制采用動態(tài)控制分配法,通過增加執(zhí)行機構(gòu)速率的懲罰來擴展一般的二次規(guī)劃控制分配算法,這樣算法具有頻率依賴性特性,同時考慮了執(zhí)行機構(gòu)帶寬的問題。
提出一種新的橫向穩(wěn)定性控制策略和轉(zhuǎn)矩分配策略。在橫擺力矩決策層,采用基于狀態(tài)觀測的H∞控制算法進行直接橫擺力的計算。鑒于分布式驅(qū)動電動汽車底盤布局的優(yōu)勢,在車輪轉(zhuǎn)矩分配層中將差動制動與差動驅(qū)動結(jié)合。為了盡量讓輪轂電機工作在額定率附近,提高電機效率,在直接橫擺力矩較小時,首先在前軸兩輪上進行轉(zhuǎn)矩分配。為了最大限度地利用前輪附著極限,減小輪胎磨損,當前輪縱向滑移率超過最佳縱向滑移率時,驅(qū)動模式能由前軸兩輪驅(qū)動切換至四輪驅(qū)動模式,驅(qū)動轉(zhuǎn)矩采用等差值分配法。
廈門大學(xué)王進,郭景華等人[31]針對分布式電動汽車在高速轉(zhuǎn)彎和變道時,由于其高度的非線性特性和參數(shù)的不確定性而出現(xiàn)失穩(wěn)問題,提出了分布式電動車輛橫向穩(wěn)定性模糊滑模控制的方法。利用模糊邏輯對滑模控制器中滑模切換函數(shù)的系數(shù)不斷進行調(diào)整優(yōu)化,采用直接橫擺力矩控制方法得出期望的附加橫擺力矩;最后使用平均分配原則實現(xiàn)附加橫擺力矩的控制分配。
同濟大學(xué)余卓平等人[32]研究了四輪輪轂電機驅(qū)動電動汽車通過驅(qū)動和制動轉(zhuǎn)矩的分配控制達到提高整車經(jīng)濟性的方法。文中所謂的轉(zhuǎn)矩分配控制是指:四輪輪轂電機驅(qū)動電動汽車的四個電動輪根據(jù)實際汽車的行駛要求(包括驅(qū)動和制動)實時進行四輪輪間轉(zhuǎn)矩的分配,直至在四輪驅(qū)動和兩輪驅(qū)動之間進行切換,力求達到系統(tǒng)的最佳經(jīng)濟特性。研究表明,轉(zhuǎn)矩最優(yōu)分配控制方法能夠明顯提高運行經(jīng)濟性,是一種具有良好應(yīng)用前景的控制方法。
分布式驅(qū)動電動汽車的各個驅(qū)動輪可獨立精準控制,具有多信息源的特點。通過考慮輪轂電機所獲得的車輛狀態(tài)參數(shù),以及車輛的本身性能,多目標優(yōu)化的分配方式也成為了學(xué)者們進行研究的內(nèi)容。
西安交通大學(xué)續(xù)丹等人[33]提出了一種以提高驅(qū)動系統(tǒng)能效為目標的轉(zhuǎn)矩分配策略。系統(tǒng)能效目標函數(shù)中包含了穩(wěn)定性和經(jīng)濟性2個指標,旨在滿足穩(wěn)定行駛的同時盡量降低車輛的能量消耗。在橫擺力矩、最大附著力和最大驅(qū)動力的約束條件下,對目標函數(shù)進行了求解,仿真結(jié)果表明,優(yōu)化分配策略在保證車體穩(wěn)定行駛的前提下,能夠明顯減少驅(qū)動系統(tǒng)的能量消耗,提高車體的系統(tǒng)能效.
針對分布驅(qū)動電動汽車的操縱和穩(wěn)定控制問題,提出了一種基于縱向力分配優(yōu)化的分層車輛穩(wěn)定控制設(shè)計方法。開發(fā)了八自由度車輛模型和三層控制系統(tǒng)。上控制器引入虛擬控制將側(cè)滑角和偏航率兩個控制變量解耦,采用積分2自由度車輛模型計算車輛穩(wěn)定性的等效偏航力矩。中間控制器在車輛執(zhí)行器的約束下,利用線性二次優(yōu)化方法優(yōu)化前后轉(zhuǎn)向角和輪胎縱向力的分布。在底層設(shè)計了基于滑動模式的滑動控制器,實現(xiàn)了車輪力矩的再分配。通過仿真實驗驗證了該設(shè)計方案的有效性。結(jié)果表明,該控制系統(tǒng)能有效地使車輛達到預(yù)期目標,提高了車輛在高速極端條件下的操縱穩(wěn)定性和執(zhí)行器失效情況下的主動安全性。
指出,連續(xù)且精確地調(diào)節(jié)每個車輪的驅(qū)動和制動扭矩被認為是在穩(wěn)態(tài)和瞬態(tài)條件下控制車輛性能的最終目標。為此,必須開發(fā)專用的扭矩矢量(TV)控制器,該控制器可在所有可能的駕駛條件下實現(xiàn)最佳的車輪扭矩分配。可以通過基于優(yōu)化的控制分配算法解決特定駕駛條件下的最佳單個車輪扭矩分配問題,該算法必須依賴于目標函數(shù)的適當選擇。通過新開發(fā)的離線優(yōu)化程序,評估了替代目標函數(shù)的性能,以實現(xiàn)四輪驅(qū)動全電動汽車的最佳車輪扭矩分配。結(jié)果表明,基于最小輪胎滑移準則的目標函數(shù)提供了比基于能量效率的函數(shù)更好的控制性能。
指出,電機可獨立控制的方式為提高全電動汽車的操作性和能源效率提供了機會。通過離線優(yōu)化程序評估了最小的電動機驅(qū)動器功率損失的最佳車輪扭矩分配,然后使用簡單的函數(shù)進行了在線控制分配的近似。車輪扭矩分配方案通過模擬方法進行評估,該方法結(jié)合了以恒定速度進行的直行駕駛,坡道操縱和一系列步進轉(zhuǎn)向操縱。與將扭矩均勻分布在四個車輪上的簡單方法相比,節(jié)能車輪扭矩分配方案可降低電動機的功率損耗并節(jié)省總功率。該方法不依賴復(fù)雜的在線優(yōu)化,并且可以應(yīng)用于實際的電動車輛,以提高效率,從而減少不同操縱期間的功耗。
為了提高電動汽車的操縱性能和穩(wěn)定性,提出了一種針對4個獨立輪式電機的電動汽車的最優(yōu)轉(zhuǎn)矩分配方法。提出了一種新的目標函數(shù),通過考慮不同性能指標之間的干擾,以多功能的方式工作:車輛重心的力和力矩誤差、執(zhí)行機構(gòu)控制力度和輪胎工作負荷使用。為了適應(yīng)不同的駕駛條件,設(shè)計了一種加權(quán)因子調(diào)整方案來調(diào)整目標函數(shù)中各性能指標的相對權(quán)重。通過仿真,驗證了所提出的最佳轉(zhuǎn)矩分配方案的有效性。在不同駕駛場景下的仿真結(jié)果表明,所提出的控制策略可以有效地提高車輛在濕滑路面條件下的操縱性能和穩(wěn)定性。
吉林大學(xué)的武冬梅[38]在分析常見力矩分配方式對車輛性能的影響的基礎(chǔ)上,提出“前后輪節(jié)能分配、左右輪安全調(diào)節(jié)”的綜合力矩分配方法,滿足橫擺力矩需求,同時保證了車輛的節(jié)能性和安全性。
文獻[39]提出具有四個單獨控制的傳動系統(tǒng)的電動汽車是過驅(qū)動的系統(tǒng),可以通過無限數(shù)量的可行車輪扭矩組合來實現(xiàn)總車輪扭矩和橫擺力矩要求。因此,四個傳動系統(tǒng)之間的節(jié)能扭矩分配對于減少傳動系統(tǒng)的功率損耗和擴大行駛范圍至關(guān)重要。可以根據(jù)車速,將最佳扭矩分配公式化為參數(shù)優(yōu)化問題的解決方案。在實驗確認的假設(shè)下,為傳動系相等的情況提供了一種解析解決方案,該假設(shè)是,傳動系功率損耗嚴格隨扭矩需求而單調(diào)增加。通過在電動汽車演示器上的模擬和實驗,沿著行駛周期和轉(zhuǎn)彎動作,對易于實施且計算快速的車輪扭矩分配算法進行了驗證。與替代的扭矩分配策略相比,結(jié)果表明可節(jié)省大量能源。
針對四輪電機獨立驅(qū)動電動汽車,提出了一種電子穩(wěn)定控制算法,利用電機驅(qū)動和再生制動力矩分配控制來提高汽車的穩(wěn)定性。其中轉(zhuǎn)矩分配算法分別采用平均轉(zhuǎn)矩分配策略、基于輪胎動力載荷的轉(zhuǎn)矩分配策略和基于最小目標函數(shù)的最優(yōu)轉(zhuǎn)矩分配策略來控制電機驅(qū)動轉(zhuǎn)矩或再生制動轉(zhuǎn)矩以提高車輛穩(wěn)定性。提出的三種扭矩分配策略可用于調(diào)節(jié)車輛完成“單變道”、“雙變道”和“蛇變道”等任務(wù)。仿真研究表明,與不使用穩(wěn)定控制相比,使用所提出的最優(yōu)轉(zhuǎn)矩分配算法的偏航率誤差均方根[RMS]平均降低了75%。
北京理工大學(xué)林程等人[41]在加速轉(zhuǎn)向聯(lián)合工況下的車輪驅(qū)動轉(zhuǎn)矩控制分配問題上,基于分層結(jié)構(gòu)搭建了分布式電驅(qū)動汽車操縱性與驅(qū)動節(jié)能控制策略。所提策略上層進行廣義控制力矩決策,基于滑模控制進行主動橫擺力矩計算;策略下層進行車輪轉(zhuǎn)矩控制分配構(gòu)建了以提高車輛操縱性、降低電能損失為目標的優(yōu)化問題,并基于離線計算和在線優(yōu)化相結(jié)合的方式進行求解。與車輪轉(zhuǎn)矩平均分配相比,基于離線計算的分配或基于離線計算加在線優(yōu)化算法控制下,車輛操縱性都有較明顯提高。
提出了一種新的目標函數(shù),它以多函數(shù)的方式工作,考慮三種不同的性能指標:最小化重心力和力矩誤差,最小化執(zhí)行器控制效果和最小化輪胎工作負載。通過在不同工作情況下對目標函數(shù)進行調(diào)整權(quán)重系數(shù),并給出了優(yōu)化問題的封閉解。仿真結(jié)果表明,該控制方案能夠提高四輪獨立電機驅(qū)動的電動汽車的操縱性能和穩(wěn)定性。
為了提高四輪驅(qū)動車輛的操縱性能和穩(wěn)定性,提出了一種最優(yōu)轉(zhuǎn)矩分配控制方法。首先,提出了一種新的多功能的目標函數(shù),以使期望力和力矩和實際力和力矩的誤差最小為目標函數(shù)。然后,根據(jù)駕駛條件,設(shè)計權(quán)重因子來調(diào)整目標函數(shù)中不同性能指標的相對權(quán)重。此外,還提出了一種基于滑動模觀測器的輪胎力估計方法,以提高輪胎力估計的精度。最后,仿真結(jié)果表明,該控制方法可以提高四輪獨立馬達車輛的操縱性能和穩(wěn)定性。
針對四輪電機驅(qū)動電動汽車橫向穩(wěn)定控制系統(tǒng),提出了非線性和制動器冗余問題。輪胎非線性問題的求解采用非線性模型預(yù)測控制方法求解目標的直接橫擺力矩。以各輪胎負荷率最小最為優(yōu)化目標,縱向力和橫擺力矩作為限制條件。制動時,電機的制動力與液壓制動聯(lián)合應(yīng)用。仿真結(jié)果表明,所提出的控制方案能有效地跟蹤所要求的偏航率和船側(cè)角,并保證了車輛的橫向穩(wěn)定性。
針對分布式驅(qū)動車輛系統(tǒng)非線性的特性,提出一種基于最優(yōu)轉(zhuǎn)矩矢量控制的車輛側(cè)向穩(wěn)定性控制系統(tǒng)。借鑒近似線性二次型規(guī)劃的最優(yōu)控制思想,設(shè)計基于質(zhì)心側(cè)向加速度的增益可調(diào)的橫擺轉(zhuǎn)矩控制方法,并根據(jù)驅(qū)動電機峰值轉(zhuǎn)矩和輪胎摩擦圓的約束條件進行轉(zhuǎn)矩矢量分配。仿真和硬件在環(huán)實驗結(jié)果表明,控制系統(tǒng)能對車輛進行有效的實時控制,在顯著改善車輛穩(wěn)定性的同時不嚴重影響車輛的縱向性能。
針對分布式驅(qū)動電動汽車在驅(qū)動滑轉(zhuǎn)和電機失效時會引起驅(qū)動力下降及產(chǎn)生非期望橫擺力矩,提出了一種以提高輪胎附著裕量和改善驅(qū)動性能的轉(zhuǎn)矩分配策略。建立包含輪胎利用率和縱向驅(qū)動力2個性能的目標函數(shù),基于廣義橫擺力矩決策控制,并在驅(qū)動防滑、電機失效、最大驅(qū)動轉(zhuǎn)矩和路面附著的約束條件下,應(yīng)用全局序列二次規(guī)劃法求解目標函數(shù)。仿真試驗結(jié)果表明:該分配策略在保證車輛穩(wěn)定性的前提下改善了車輛的動力性能,同時提高了車輪附著裕量。
針對前后軸雙電機電動汽車的效率提升問題,設(shè)計了基于電機效率最優(yōu)和基于電池效率最優(yōu)的前后輪雙電機轉(zhuǎn)矩分配方法。研究發(fā)現(xiàn)這兩種效率最優(yōu)的方法在轉(zhuǎn)矩分配上存在沖突現(xiàn)象,因此,采用一種多目標粒子群優(yōu)化算法求得同時顧電機效率和電池效率的最優(yōu)策略,從而避免兩種策略同時工作時出現(xiàn)的競爭現(xiàn)象。仿真和實驗結(jié)果表明,采用多目標粒子群優(yōu)化算法的前后軸雙電機轉(zhuǎn)矩分配方案可以提高電動汽車的系統(tǒng)效率和續(xù)航里程。整車動力學(xué)分析表明,采用多目標粒子群優(yōu)化算法的前后軸雙電機轉(zhuǎn)矩分配方案不會對整車的穩(wěn)定性和平順性產(chǎn)生影響。
以上,主要以近十年的研究內(nèi)容分析,可以發(fā)現(xiàn),分布式電動汽車橫向穩(wěn)定性中所涉及到的轉(zhuǎn)矩分配的問題,多趨向于采用基于優(yōu)化的控制方法,根據(jù)車輛狀態(tài)將最佳扭矩分配公式轉(zhuǎn)換成多參數(shù)優(yōu)化的問題進行解決。通過優(yōu)化控制方法分配轉(zhuǎn)矩,可在保證汽車穩(wěn)定行駛的同時,最大程度地提高驅(qū)動系統(tǒng)的能源效率以及其他性能。
5 總結(jié)
分布式驅(qū)動電動汽車的底盤由傳統(tǒng)的機械連接變?yōu)殡姎膺B接,為突破底盤線控技術(shù)對智能網(wǎng)聯(lián)車發(fā)展意義重大。同時,分布式驅(qū)動電動汽車的四輪力矩具有獨立且可快速精準控制的特點,具有明顯的控制優(yōu)勢,為方便進行連續(xù)多種動力學(xué)控制和車輛穩(wěn)定性提高提供了重要的硬件條件。
對分布式驅(qū)動電動汽車的驅(qū)動電機進行合理的力矩分配在電子差速技術(shù)和橫向穩(wěn)定性方面有著重要作用。在電子差速技術(shù)上,在各個驅(qū)動輪上進行合理的轉(zhuǎn)矩分配能夠?qū)崿F(xiàn)電子差速的功能,同時保證轉(zhuǎn)向穩(wěn)定性。在橫向穩(wěn)定性方面,合理的轉(zhuǎn)矩分配能夠?qū)崿F(xiàn)轉(zhuǎn)向過程中穩(wěn)定性的提高。
綜合對比了多種轉(zhuǎn)矩分配策略,現(xiàn)如今,轉(zhuǎn)矩分配發(fā)展為以多目標優(yōu)化控制的分配方式為主。轉(zhuǎn)矩優(yōu)化控制分配的方式能夠考慮汽車的各項參數(shù)和性能,改善整車的穩(wěn)定性,降低能耗,提升動力性能等,現(xiàn)已成為了分布式驅(qū)動電動汽車的焦點。
文章主要討論了電子差速技術(shù)和橫向穩(wěn)定性兩方面的轉(zhuǎn)矩分配策略,由于驅(qū)動電機獨立控制,針對分布式電動汽車潛在的多電機失效的情況,各驅(qū)動輪如何協(xié)調(diào)工作,如何進行轉(zhuǎn)矩分配控制未做討論,這對于發(fā)揮分布式電動汽車的優(yōu)勢仍然具有重要意義。
參考文獻
[1] 余卓平,馮源,熊璐.分布式驅(qū)動電動汽車動力學(xué)控制發(fā)展現(xiàn)狀綜述[J].機械工程學(xué)報,2013,49(8):105-114.
[2] 王震坡,薛雪,王亞超.基于自適應(yīng)無跡卡爾曼濾波的分布式驅(qū)動電動汽車車輛狀態(tài)參數(shù)估計[J].北京理工大學(xué)學(xué)報,2018,38(07): 698-702.
[3] 中國科協(xié)第390次青年科學(xué)家論壇:分布式驅(qū)動電動汽車關(guān)鍵技術(shù)與產(chǎn)業(yè)化前景.
[4] Muratas.Innovation by in-wheel-motor drive unite.[J]Vehicle System Dynamics,2012,50(6):807-830.
[5] 陳清泉,孫逢春,祝嘉光.現(xiàn)代電動汽車技術(shù)[M].北京:北京理工大學(xué)出版社,2002.
[6] Park Jung-Woo,Koo Dae-Hyun, Kim Jong-Moo,et al.High Perfor -mance Drive Unit for 2-Motor Driven Electric Vehicle. Proceedings of the Fourteenth Applied Power Electronics Conference and Expo -sition. Dallas: IEEE.1999.
[7] 李孟良,李洧,方茂東,劉向民等.道路車輛實際行駛工況解析方法研究[J].武漢理工大學(xué)學(xué)報(交通科學(xué)與工程版),2003(01):69-72.
[8] 姚芳,林祥輝,吳正斌等.電動汽車電子差速控制技術(shù)研究綜述[J/OL].自動化學(xué)報:1-14[2020-06-09]. https://doi.org/10.16383/ j.aas.c190293.
[9] 葛英輝,倪光正.新型電動車電子差速控制策略研究[J].浙江大學(xué)學(xué)報(工學(xué)版), 2005(12):1973-1978.
[10] L. Zhai and S. Dong, Electronic differential speed steering control for four in-wheel motors independent drive vehicle,2011 9th World Congress on Intelligent Control and Automation, Taipei, 2011, pp. 780-783.
[11] Ravi A, Palani S. Robust Electronic Differential Controller for an Electric Vehicle[J]. American Journal of Applied Sciences, 2013, 10(11): 1356-1362.
[12] J. Folgado, S. S. Valtchev and F. Coito, Electronic differential for electric vehicle with evenly split torque,?2016 IEEE International Power Electronics and Motion Control Conference (PEMC), Varna, 2016, pp. 1204-1209.
[13] 唐自強,龔賢武,趙軒等.分布式驅(qū)動汽車自適應(yīng)差速仿真研究[J].合肥工業(yè)大學(xué)學(xué)報(自然科學(xué)版),2017,40(10):1320-1325.
[14] 張厚忠,蘇健,張勇.電動汽車低速轉(zhuǎn)向電子差速兼顧輔助轉(zhuǎn)向控制[J].重慶理工大學(xué)學(xué)報(自然科學(xué)),2017,31(08):14-21.
[15] 陳江松,童亮,陳勇.純電動汽車輪轂電機驅(qū)動電子差速研究[J].北京信息科技大學(xué)學(xué)報(自然科學(xué)版),2018,33(05):88-92.
[16] 臧懷泉,戴彥,張素燕等.一種基于相對滑移率的電動汽車電子差速控制方法研究[J].機械工程學(xué)報,2017,53(16):112 -119.
[17] 陸文昌,張勇,張厚忠.輪轂電機驅(qū)動汽車電子差速系統(tǒng)P-模糊PID控制研究[J].機械制造與自動化,2017,46(06):193-196.
[18] 王亞楠,嚴世榕,呂兵兵等.分布式驅(qū)動電動汽車電子差速系統(tǒng)仿真研究[J].機電工程,2018,35(10):1128-1132.
[19] Lin, C. Xu, Z. Wheel Torque Distribution of Four-Wheel-Drive Electric Vehicles Based on Multi-Objective Optimization. Energ -ies2015,?8, 3815-3831.
[20] 馬良峰,李建秋,高明明.分布式驅(qū)動電動汽車轉(zhuǎn)彎轉(zhuǎn)矩優(yōu)化方法與仿真驗證[J].中國科技論文,2017,12(07):754-757+769.
[21] 蘇亮.分布式驅(qū)動電動客車驅(qū)動扭矩分配控制策略研究[J].客車技術(shù)與研究,2019,41(03):5-7.
[22] 胡金芳,顏春輝,趙林峰等.分布式驅(qū)動電動汽車轉(zhuǎn)向工況轉(zhuǎn)矩分配控制研究.中國公路學(xué)報.http://kns.cnki.net/kcms/detail/61. 1313.U.20200602.0907.002.html.
[23] R. Hou, L. Zhai, T. Sun, Y. Hou et al, Steering Stability Control of a Four In-Wheel Motor Drive Electric Vehicle on a Road With Var -ying Adhesion Coefficient, in IEEE Access, vol. 7, pp. 32617- 32627, 2019.
[24] Xiong L,Teng G W,YU Z P,et al. Novel stability control strategy for distributed drive electric vehicle based on driver operation inten -tion[J].International Journal of Automotive Technology, 2016,17 (4):651-663.
[25] Alipour H, Sabahim, Sharifian M B B.Lateral stabilization of a four-wheel independent drive electric vehicle on slippery roads [J]. Mechatronics, 2015,30 (2) :275-285.
[26] 余卓平,肖振宇,冷搏,等.分布式驅(qū)動電動汽車操縱穩(wěn)定性控制評價[J].華東理工大學(xué)學(xué)報, 2016, 33(5): 25-32.
[27] C. Hu, R. Wang, F. Yan, Y. Huang, H. Wang and C. Wei, Differen -tial Steering Based Yaw Stabilization Using ISMC for Indepen -dently Actuated Electric Vehicles, in IEEE Transactions on Intelli -gent Transportation Systems, vol.19, no.2,pp.627-638, Feb. 2018.
[28] 余卓平,王竑博,熊璐,等.分布式驅(qū)動電動客車驅(qū)動防滑控制效果分析[J].汽車技術(shù),2016(3): 18-25.
[29] 袁希文,文桂林,周兵.考慮側(cè)向穩(wěn)定性的分布式電驅(qū)動汽車制動滑移率控制[J].西安交通大學(xué)學(xué)報,2015,49(05):43-48+121.
[30] 張志勇,王東濤,黃彩霞等.分布式驅(qū)動電動汽車橫向穩(wěn)定性與轉(zhuǎn)矩分配控制[J].長沙理工大學(xué)學(xué)報(自然科學(xué)版),2017,14(02): 61-67.
[31] 王進,郭景華.分布式電動車輛橫向穩(wěn)定性模糊滑模控制[J].廈門大學(xué)學(xué)報(自然科學(xué)版),2018,57(02):279-284.
[32] 余卓平,張立軍,熊璐.四驅(qū)電動車經(jīng)濟性改善的最優(yōu)轉(zhuǎn)矩分配控制[J].同濟大學(xué)學(xué)報:自然科學(xué)版,2005,33(10):1355-1361.
[33] 續(xù)丹,王國棟,曹秉剛,等.獨立驅(qū)動電動汽車的轉(zhuǎn)矩優(yōu)化分配策略研究[J].西安交通大學(xué)學(xué)報,2012,46(3):42-46.
[34] Y. Hu,X.-Z. Zhang, and Y.-N.Wang, Design of vehicle stability control of distributed-driven electric vehicle based on optimal torque allocation, in Proc. 33rd Chin. Control Conf., Jul. 2014, pp. 195-200.
[35] L.De Novellis,A.Sorniotti and P. Gruber, Wheel Torque Distribution Criteria for Electric Vehicles With Torque-Vectoring Differentials, in?IEEE Transactions on Vehicular Technology, vol. 63, no. 4, pp. 1593-1602, May 2014.
[36] A. Pennycott, L.De Novellis,A. Sabbatini, et al. Reducing the motor power losses of a four-wheel drive, fully electric vehicle via wheel torque allocation, Proc. Inst. Mech. Eng., Automobile Eng., vol. 228, no. 7, pp. 830-839, 2014.
[37] Li B, Goodarzi A, Khajepour A, S Chen, et al. An optimaltorque distribution control strategy for four-independent wheel drive elec -tric vehicles. Vehicle System Dynamics, vol 53, issue 8, pp. 1172- 1189,2015.
[38] 武冬梅.分布式驅(qū)動電動汽車動力學(xué)控制機理和控制策略研究[D].吉林:吉林大學(xué),2015.
[39] A. M. Dizqah, B. Lenzo, A. Sorniotti, P. Gruber, et al. A Fast and Parametric Torque Distribution Strategy for Four-Wheel-Drive Energy-Efficient Electric Vehicles, in IEEE Transactions on Indus -trial Electronics, vol. 63, no. 7, pp. 4367-4376, July 2016.
[40] L. Zhai, T. Sun and J. Wang, Electronic Stability Control Based on Motor Driving and Braking Torque Distribution for a Four In- Wheel Motor Drive Electric Vehicle, in IEEE Transactions on Vehicular Technology, vol. 65, no. 6, pp. 4726-4739, June 2016.
[41] 林程,徐志峰,張虹,等.分布式電驅(qū)動汽車驅(qū)動力矩優(yōu)化控制分配[J].北京理工大學(xué)學(xué)報,2016, 36(7): 668-672.
[42] J. Hu, J. Tao, F. Xiao, X. Niu, et al. An Optimal Torque Distribution Control Strategy for Four-Wheel Independent Drive Electric Vehicles Considering Energy Economy, in IEEE Access, vol. 7, pp. 141826-141837, 2019.
[43] N. Zhang, H. Li, X. Zhang, and X. Lu, An optimal torque distribu -tion for electric vehicle based on sliding mode observer, in Proc. 36th Chin.Control Conf., Jul. 2017, pp. 9373-9378.
[44] S. Li, D. Zhao, L. Zhang,et al. Lateral stability control system based on cooperative torque distribution for a four in-wheel motor drive electric vehicle,?2017 36th Chinese Control Conference (CCC), Dalian, 2017, pp. 1119-1123.
[45] 謝偉東,徐威,付志軍等.分布式驅(qū)動電動汽車的近似最優(yōu)轉(zhuǎn)矩矢量控制[J].汽車工程,2018,40(11):1308-1316.
[46] 黃開啟,羅良銓,程健等.分布式驅(qū)動電動汽車綜合性能轉(zhuǎn)矩優(yōu)化分配[J].控制工程,2019,26(11):2078-2085.
[47] 漆星,王群京,陳龍等.前后軸雙電機電動汽車轉(zhuǎn)矩分配優(yōu)化策略[J].電機與控制學(xué)報,2020,24(03):62-70+78.