基于CRUISE的電動拖拉機動力性能的優化研究
2020-12-15 07:00:46孫傳東
汽車實用技術 2020年22期
孫傳東
摘 要:由于電動拖拉機動力不足的限制,導致電動拖拉機不能在山區廣泛使用,影響其動力不足的主要因素是爬坡度和牽引力。在電機參數固定的情況下,變速箱的制作工藝及大小受到限制,所以通過改變主減速器的傳動比來改變電動拖拉機爬坡度和牽引力。文章利用CRUISE軟件對電動拖拉機進行仿真,研究了主減速器傳動比與爬坡度、牽引力的規律特性,提供了一種設計主減速器傳動比的方法,以此來改善電動拖拉機的爬坡度與牽引力。
關鍵詞:電動拖拉機;傳動比;爬坡度;牽引力
中圖分類號:S24? 文獻標識碼:A? 文章編號:1671-7988(2020)22-57-03
Abstract: Due to the limited power of electric tractors, electric tractors can not be widely used in mountainous areas. The main factors affecting their power shortage are slope climbing and traction. In the case of fixed motor parameters, gearbox production process and size is limited, so by changing the transmission ratio of the main reducer to change the electric tractor climbing slope and traction. In this paper, CRUISE software is used to simulate the electric tractor, and the regular characteristics of the transmission ratio, climbing slope and traction of the main reducer are studied. A method of designing the transmission ratio of the main reducer is provided to improve the climbing slope and traction of the electric tractor.
Keywords: Electric tractor; Transmission ratio; Climbing slope; Traction
CLC NO.: S24? Document Code: A? Article ID: 1671-7988(2020)22-57-03
前言
隨著石油資源的日益匱乏,柴油拖拉機逐漸退出了歷史的舞臺,電動拖拉機的使用引發了學者和設計者的廣泛的關注。為了解決電動拖拉機存在的動力不足問題,仿真軟件的使用是必不可少的。李崧[1]通過CRUISE軟件搭建了輪式拖拉機仿真平臺,對拖拉機進行性能研究;夏先文[2]利用CRUISE軟件搭建純電動拖拉機模型,并對各個檔位下的最大牽引力及其工作速度進行了分析。本文利用完整的電動拖拉機數據,建立了電動拖拉機的仿真模型,針對爬坡度和牽引力進行了仿真分析,提供了一種設計主減速器傳動比的方法,可對以后的電動拖拉機的爬坡性能和牽引力性能分析及使用提供有力的借鑒。
1 構建系統模型并建立物理及信號連接
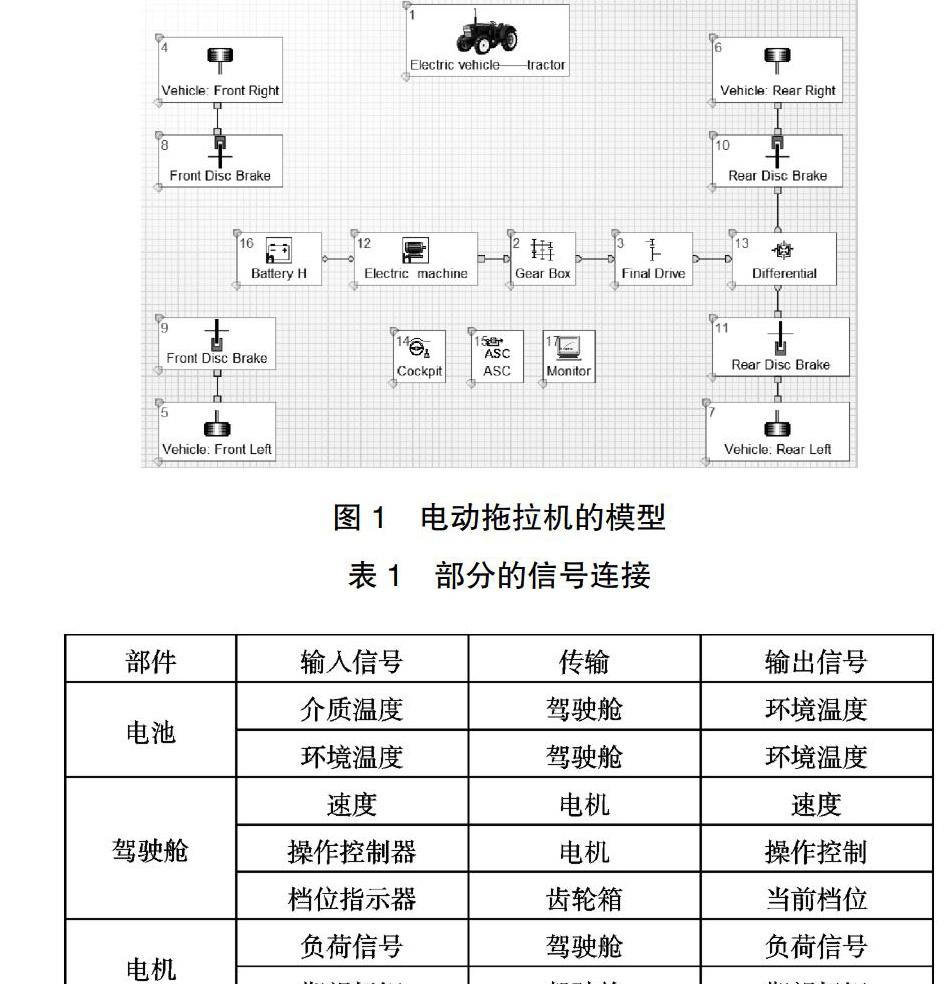
本文構建的電動拖拉機模型共包含了17個模塊,由1個動力電池組模塊,1個電機模塊,1個變速箱模塊,1個主減速器模塊,1個差速器模塊,4個制動器模塊,4個輪胎模塊,1個駕駛員模塊,1個ASC模塊和1個顯示器模塊等組成。
利用CRUISE仿真軟件提供的模塊建立電動拖拉機的仿真模型,電動拖拉機模型如圖1所示。為了仿真結果的準確性,各個模塊的信號連接,嚴格按照能量輸入、輸出關系進行總線數據連接和連接線連接,保證信號傳遞的正確性。其中駕駛艙、電池、電機對仿真至關重要,其信號連接如表1所示;制動器、車輪模塊以及其他微小的零部件對仿真結果影響較小,這里不做展示。
2 設置各部件的參數
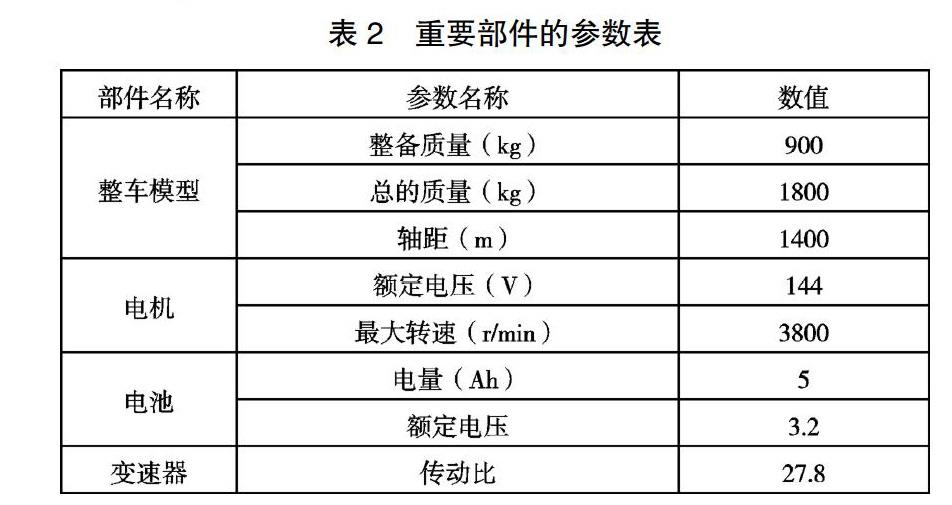
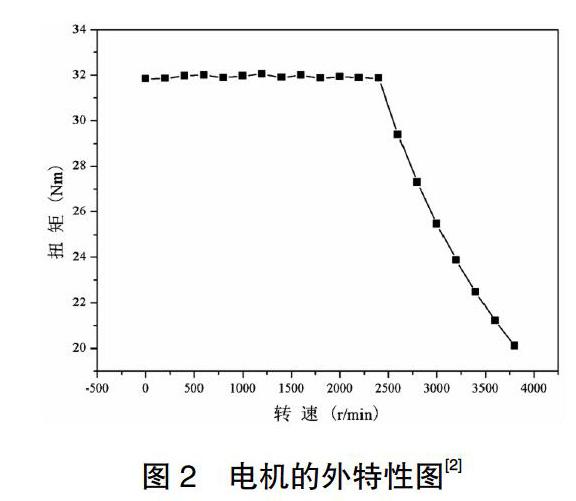
車輛整體模型的參數準確的描述了整車的整體結構形狀及其質量,如整備質量,軸距等,對于保證仿真結果的準確性至關重要。這里僅對電動拖拉機的重要部件的參數做詳細的介紹,如車輛整體模型的參數、驅動電機參數、電池參數等,重要部件的參數如表2所示,電動機外特性曲線設置如圖2[2]。制動器、輪胎等元件對仿真結果影響較小,這里不再一一贅述。
3 電動拖拉機爬坡度與牽引力的分析
利用CRUISE仿真軟件,能夠對電動拖拉機的循環行駛工況、爬坡性能、穩態行駛、最高車速、最大牽引力等一系列任務進行仿真分析,本文重點對爬坡度和牽引力進行了深度分析。
由圖3可知:
(1)小型電動拖拉機的動力性評價標準要求最高爬坡度大于等于20%。本例中i=1.058~3.058之間,最高爬坡度均大于20%,因此具有良好的爬坡性能。
(2)在主減速器不同傳動比下,電動拖拉機在速度較小時爬坡度基本保持不變,隨著速度增大爬坡度先急劇減小后逐漸趨近于零。因此在使用拖拉機時要適當的控制速度,例如i=3.058時,拖拉機的運行速度應大致保持在2km/h,此時爬坡度曲線還未開始下降,既不會使電動拖拉機速度過低,影響生產效率,又能保證電動拖拉機的動力性。
(3)爬坡度曲線圖與電機的外特性曲線圖的變化趨勢相似,體現了電機額定轉速前的恒轉矩的特性。
由圖4可知:
不同主減速器傳動比下速度與牽引力的關系圖與速度與爬坡度的關系圖具有很高的相似性,爬坡度與牽引力隨速度變化的趨勢幾乎一致。
由表3可知,在電動拖拉機等于3km/h速度下,爬坡度曲線與牽引力曲線隨主減速器的傳動比的變化趨勢。在實際生活中,我們為了適應山區復雜的地理環境,我們需要選取合適的傳動比來獲得高的爬坡度和牽引力。
一般小型電動拖拉機的動力性評價標準要求爬坡度大于等于20%,對于爬坡度來說,主減速器傳動比的左邊界為1.4;在傳動比2.4~2.6之間,采用線性插值的方法進行估算,主減速器傳動比的右邊界為2.528;因此,合適的傳動比大約為1.4~2.528。
小型電動拖拉機的動力性評價標準要求牽引力大于3800N,對于牽引力而言,在傳動比1.8~2之間,采用線性插值的方法進行估算,主減速器傳動比的右邊界為1.945;在傳動比2.4~2.6之間,采用線性插值的方法進行估算,主減速器傳動比的右邊界為2.446;因此合適的傳動比大約為1.945~2.446。
另外我們還需要考慮到主減速器的大小受到機器本身限制,在滿足生產要求所需的動力性后,我們應盡可能選取小的傳動比來減小主減速器的體積。本例中的最佳傳動比大約為1.945,既保證了較大的爬坡度和牽引力,又保證主減速器不占用過大的空間。
4 結語
在電動拖拉機爬坡度大于等于20%,牽引力大于3800N,工作速度為3km/h的情況下,繪制同一速度下不同傳動比與爬坡度的關系表和同一速度下不同傳動比與牽引力的關系表,通過插值運算的方式計算主減速器的傳動比,提供了一種在一定生產條件下的主減速器傳動比的設計方法,為今后其他電動拖拉機主減速器傳動比的選擇提供了借鑒。
參考資料
[1] 李崧.LH1620輪式拖拉機動力傳動系統設計分析[D].鎮江:江蘇大學,2011.
[2] 夏先文,純電動拖拉機驅動系統設計分析[D].河南:河南科技大學, 2015.
[3] 魏吉.汽車新能源與節能技術應用研究[J].科技風,2013,(08):104.
[4] 梁延會,夏長高.設施大棚履帶式電動拖拉機動力學性能分析[J].農機化研究,2015,37(01):55-58.
[5] 張鐵民,閆國琦,溫利利,廖懿華.我國電動力農業機械發展現狀與趨勢[J].農機化研究,2012,34(04):236-240.
[6] 秦松.園藝電動拖拉機驅動系統控制策略研究[D].江蘇大學,2019.
[7] 呂欣.小型純電動拖拉機驅動系統參數匹配與優化[D].湖南科技大學,2017.