基于LSTM網絡的車輛軌跡預測研究
2020-12-15 07:00:46張曉寧
汽車實用技術 2020年22期
關鍵詞:高速公路
張曉寧
摘 要:為了提高車輛在高速公路行駛時的安全性和舒適性,基于深度學習中的長短期記憶網絡方法,提取車輛行駛過程中的特征參數,對車輛未來行駛軌跡進行預測,在駕駛模擬器上進行仿真與測試,結果表明該方法可以精準有效地預測出車輛行駛軌跡。
關鍵詞:高速公路;軌跡預測;長短期記憶網絡
中圖分類號:U471.1? 文獻標識碼:A? 文章編號:1671-7988(2020)22-32-03
Abstract: In order to improve the safety and comfort of the vehicle driving on the highway, based on the Long Short-Term Memory network method in deep learning, this paper extracts the characteristic parameters of the vehicle driving process and predicts the future driving trajectory of the vehicle. The simulation and test are carried out on the driving simulator, and the results show that this method can accurately and effectively predict the vehicle trajectory.
Keywords: Highway; Trajectory prediction; Long and short-term memory network
CLC NO.: U471.1? Document Code: A? Article ID: 1671-7988(2020)22-32-03
引言
精準實時地獲得車輛在高速公路上行駛的軌跡參數,對于智能交通系統的管理有著重要的作用,通過預測車輛未來時刻的軌跡信息,能夠有效評估駕駛安全性和舒適性,在有安全隱患時能夠及時預警或改變行駛策略,避免碰撞事故的發生。目前很多研究人員根據運動學或動力學模型進行軌跡預測的建模,相關的研究主要涉及多項式擬合算法來對軌跡進行預測[1],由于車輛軌跡具有復雜性、多樣性和隨機性,使得預測出的軌跡在長時序上的精度不能滿足實際需求。近些年來,基于數據驅動的算法在軌跡預測模型中得到廣泛應用,對于復雜問題的擬合能力強。目前數據驅動模型主要有隱性馬爾可夫[2]、動態貝葉斯網絡[3]、深度學習[4]等算法,其中深度學習算法中的循環神經網絡對時間序列問題具有較好的處理能力,對于具有多樣性、不確定性的軌跡信息具有良好的表征能力。本文采用循環神經網絡中的LSTM對車輛的未來行駛軌跡進行預測研究,并在駕駛模擬器上采集車輛軌跡進行模型驗證。
1 循環神經網絡
1.1 RNN網絡
RNN是一種帶有記憶功能的神經網絡,適用于解決時間序列問題。然而隨著時間間隔的不斷累積,RNN網絡存在梯度消失和梯度爆炸的問題,最終導致網絡無法獲取之前序列的有效信息,失去學習的能力[5]。
1.2 LSTM網絡
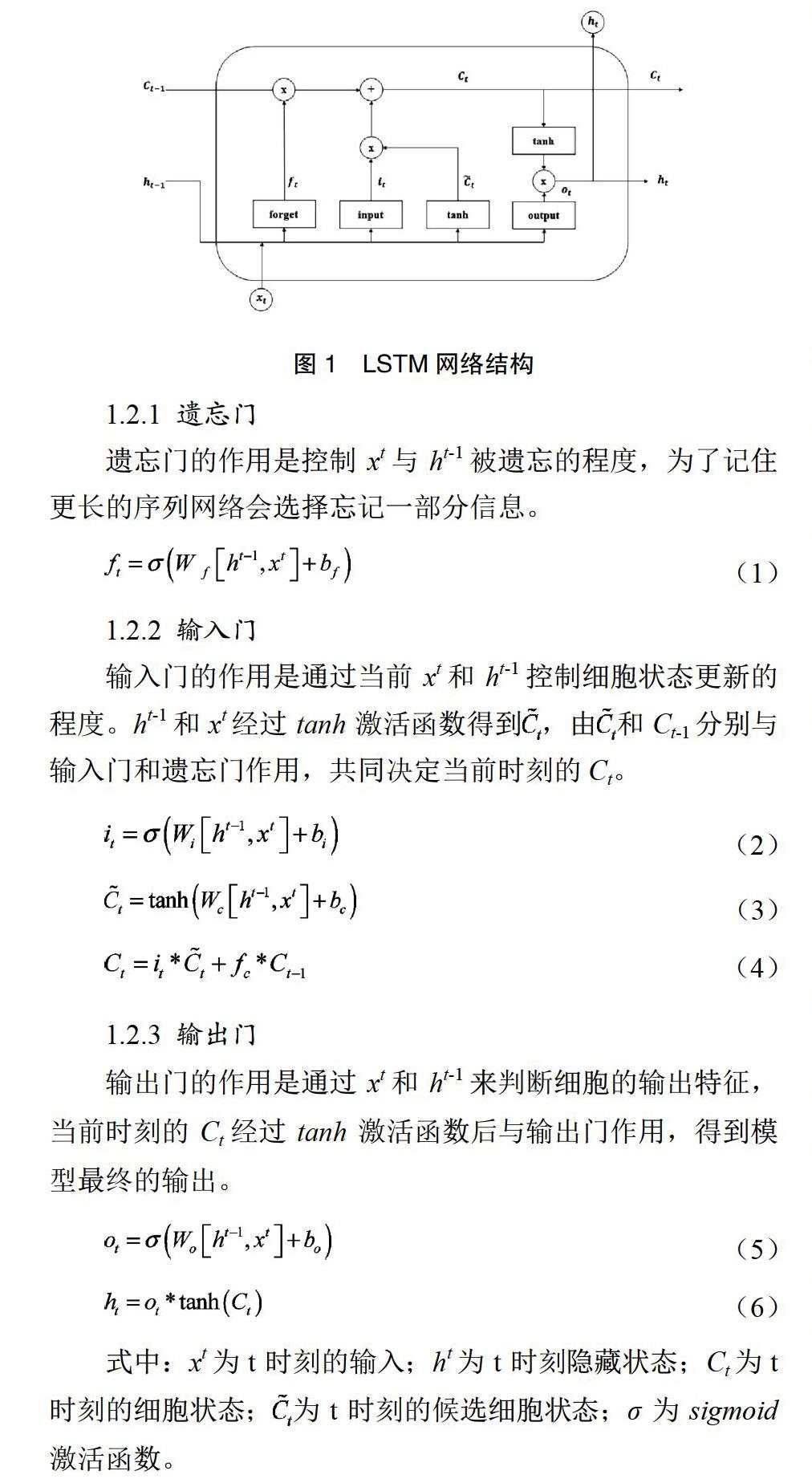
LSTM是RNN的一種變體,可以有效地解決上述這兩個問題。LSTM網絡的核心思想是存在能夠隨時間進行信息傳遞的細胞狀態,該細胞狀態通過網絡中的各種門結構,對信息進行增刪,使得網絡具體記憶功能。LSTM網絡中存在三種門,分別是遺忘門、輸入門和輸出門,每個門和細胞狀態通過激活函數引入非線性要素,具體結構如圖1所示。
1.2.1 遺忘門
遺忘門的作用是控制xt與ht-1被遺忘的程度,為了記住更長的序列網絡會選擇忘記一部分信息。
1.2.2 輸入門
輸入門的作用是通過當前xt和ht-1控制細胞狀態更新的程度。ht-1和xt經過tanh激活函數得到,由和Ct-1分別與輸入門和遺忘門作用,共同決定當前時刻的Ct。
1.2.3 輸出門
輸出門的作用是通過xt和ht-1來判斷細胞的輸出特征,當前時刻的Ct經過tanh激活函數后與輸出門作用,得到模型最終的輸出。
2 預測模型
2.1 模型特征
為深度挖掘車輛行駛過程中的歷史軌跡信息,以自車車速、車輛的縱向坐標、車輛的橫向坐標、縱向加速度、橫向加速度與橫擺角速度作為車輛的行駛特征來構建行駛預測模型,建立歷史車輛軌跡與未來車輛軌跡特征數據之間的映射關系,t時刻的軌跡特征具體可以表示為:
3 試驗與分析
3.1 數據采集與處理
在駕駛模擬器中,使用高速公路自由換道場景對車輛軌跡模型進行仿真與測試。采集車輛車速、車輛位置縱坐標、車輛位置橫坐標、縱向加速度、橫向加速度和橫擺角速度作為表征車輛軌跡的特征值。
由于不同的特征具有不同的取值范圍,為了減小不同量綱之間引起的誤差,對數據進行歸一化處理。為了得到實際預測結果,還需要對歸一化后的數據進行反歸一化。
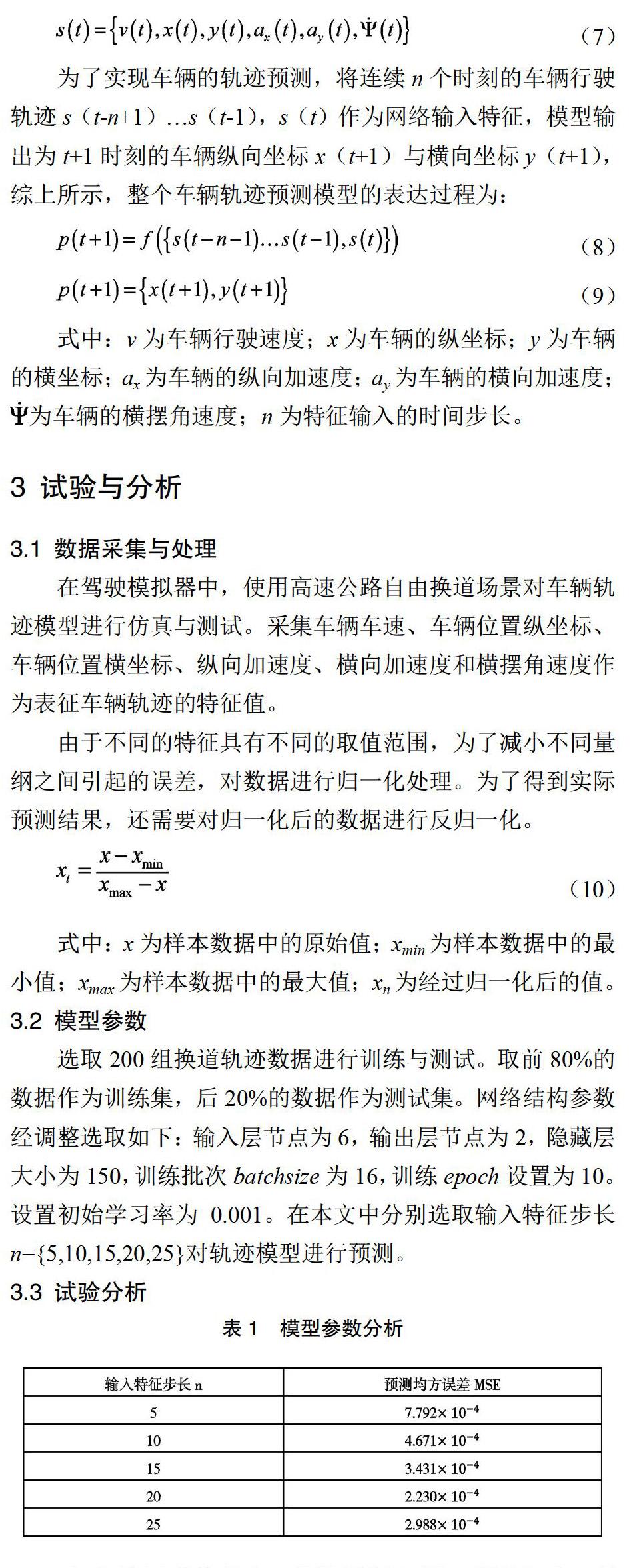
3.2 模型參數
選取200組換道軌跡數據進行訓練與測試。取前80%的數據作為訓練集,后20%的數據作為測試集。網絡結構參數經調整選取如下:輸入層節點為6,輸出層節點為2,隱藏層大小為150,訓練批次batchsize為16,訓練epoch設置為10。設置初始學習率為 0.001。在本文中分別選取輸入特征步長n={5,10,15,20,25}對軌跡模型進行預測。
3.3 試驗分析
該模型具有良好的預測精度,說明lstm在處理時序問題上可以精準地預測出未來時刻車輛的軌跡,可以對車輛行駛軌跡進行有效監控和管理,對提高車輛行駛的安全性具有重要意義。
4 結論
車輛軌跡預測在智能交通系統中發揮著重要的作用,本文基于時序預測的LSTM網絡根據已知的歷史車輛軌跡信息進行建模,能夠對目標車輛未來時刻的行駛軌跡進行有效、精準的位置預測,同時考慮了軌跡預測的精準性和時效性,有助于交通系統中車輛的狀態監控與行為管理,提高車輛行駛安全性與通行效率。
參考文獻
[1] 張穎達.基于NGSIM數據的車輛變道行為博弈模型[D],2016.
[2] Schreier M, Willert V, Adamy J. An Integrated Approach to Man -euver-Based Trajectory Prediction and Criticality Assessment in Arbitrary Road Environments[J].IEEE Transactions on Intelligent Transportation Systems, 2016, 17(10):2751-2766.
[3] 李建平.面向智能駕駛的交通車輛運動預測方法研究[D],2018.
[4] 房哲哲.基于深度學習的換道行為建模與分析[D],2018.
[5] Juergen Schmidhuber. Gradient Flow in Recurrent Nets: the Diffi -culty of Learning Long-Term Dependencies[M]// Gradient Flow in Recurrent Nets: The Difficulty of Learning Long Term Dependen -cies.Wiley-IEEE Press,2001.
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
鴨綠江(2021年17期)2021-10-13 07:05:32
中國交通信息化(2020年8期)2021-01-26 00:51:18
中國交通信息化(2020年10期)2021-01-14 03:29:50
中國交通信息化(2019年6期)2019-08-23 08:28:40
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2017年3期)2017-06-08 06:09:23
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
筑路機械與施工機械化(2014年5期)2014-03-01 02:59:08