A*算法在自動駕駛車輛路徑規(guī)劃中的應用
2020-12-15 07:00:46馮凱吉星楊昕
汽車實用技術 2020年22期
馮凱 吉星 楊昕
摘 要:路徑規(guī)劃是自動駕駛系統(tǒng)研究的重要內(nèi)容之一,A*算法是一種啟發(fā)式的搜索算法,可以大幅度減少搜索過程中的擴展節(jié)點,從而可以快速找到一條從起點到終點的最優(yōu)路徑。結合高精度地圖在自動駕駛系統(tǒng)中的應用,文章將A*算法用于自動駕駛車輛在高精度地圖中的全局路徑規(guī)劃,通過在自動駕駛車輛平臺上實驗測試表明該算法能夠快速準確地規(guī)劃出一條最短路徑。
關鍵詞:路徑規(guī)劃;A*算法;無人駕駛;高精度地圖
中圖分類號:U469.7? 文獻標志碼:A? 文章編號:1671-7988(2020)22-25-04
Abstract: Path planning is one of the important contents of automated driving system research. A* algorithm is a heuristic search algorithm, which can significantly reduce the extended nodes in the search process, so as to quickly find an optimal path from the starting point to the end point. Combined with the application of high-precision map in the automated driving system, this paper applies the A* algorithm to the global path planning of the autonomous vehicle in the high-precision map. The experimental test on the platform of the autonomous vehicle shows that the algorithm can quickly and accurately plan a shortest path.
Keywords: Path planning; A* algorithm; Automated driving; High precision map
CLC NO.: U469.7? Document Code: A? Article ID: 1671-7988(2020)22-25-04
引言
無人駕駛車輛也稱無人車、自動駕駛汽車,是指搭載有先進的車載傳感器、控制器、執(zhí)行器等裝置,具備復雜環(huán)境感知、智能決策和控制等功能,能根據(jù)自身對周圍環(huán)境條件的感知、理解,自動進行合理的車輛運動控制,且能夠達到人類駕駛員駕駛水平的車輛[1][2]。路徑規(guī)劃是無人駕駛車輛系統(tǒng)最基本的環(huán)節(jié)之一,它是指在真實的道路環(huán)境中,無人駕駛系統(tǒng)按照設定的性能指標(如無碰撞、距離最短、時間最短等)尋找一條從開始位置到目標位置的最優(yōu)路徑[3][4]。根據(jù)對周圍環(huán)境信息的知道程度不同,可以將路徑規(guī)劃分為全局路徑規(guī)劃和局部路徑規(guī)劃[5]。全局路徑規(guī)劃是指在已知的地圖數(shù)據(jù)中規(guī)劃出從起點到目標點的最優(yōu)路徑;局部路徑規(guī)劃是指依靠感知數(shù)據(jù)、局部地圖數(shù)據(jù)和車輛位姿信息規(guī)劃出一條無碰撞、滿足約束條件的可行駛軌跡。
目前常用的全局路徑規(guī)劃算法有Dijkstra算法、A*算法、蟻群算法和粒子群算法等[6][7],其中由尼爾森提出的A*算法在路徑規(guī)劃領域廣泛應用。本文在基于無人駕駛高精度地圖的基礎上,通過A*算法進行了全局路徑規(guī)劃的設計與實現(xiàn),將算法在無人車平臺上進行了真實環(huán)境下的測試與驗證,結果表明A*算法能夠更加快速的找到一條最短路徑。
1 A*算法描述
A*算法是在Dijkstra算法的基礎上提出的,它引入了啟發(fā)式函數(shù)和預估代價,是在一種靜態(tài)路網(wǎng)中求解最短路徑最有效的直接搜索方法,也是許多其他問題的常用啟發(fā)式算法。算法的核心部分在于估價函數(shù)的設計[8],其估價函數(shù)如式1所示:
其中,f(n)是從初始狀態(tài)經(jīng)由狀態(tài)n到目標狀態(tài)的代價估計,g(n)是從初始狀態(tài)到狀態(tài)n的實際代價,h(n)是從狀態(tài)n到目標狀態(tài)的最佳路徑的估計代價。
在A*算法中由于g(n)表示實際距離,而h(n)表示估計距離,所以在A*算法估價函數(shù)中h(n)的選擇具有關鍵性的作用,決定了A*算法的效率,其中常用的估價函數(shù)有曼哈頓距離、對角線距離和歐幾里德距離等。在估價函數(shù)中,如果h(n)等于0,那么f(n)= h(n),則A*算法就演變成為了Dijkstra算法,能夠找到從起點到終點的最短路徑,但是擴展節(jié)點會增多,效率變差。如果h(n)比從節(jié)點n移動到目標節(jié)點的真實代價小,此時A*也能保證找到一條最短路徑;但是h(n)越小,A*的擴展節(jié)點越多,耗費資源越大,運行效率降低。如果h(n)精確的等于從節(jié)點n到目標節(jié)點的真實代價,則A*將會快速的尋找到最佳的路徑并且不會進行額外的搜索擴展,此時算法運行效率最高。如果h(n)比從節(jié)點n移動到目標節(jié)點的真實代價大,那么A*不能夠保證找到最短的路徑,但是此時算法的運行速度快。另一種極端的情況為h(n)遠遠大于g(n),那么此時f(n)≈ h(n),則A*算法演變?yōu)锽FS算法。
2 高精度地圖的有向圖建模
高精度地圖是無人駕駛的基礎,它包含了車道模型、道路部件、道路屬性和其它的圖層信息。在無人駕駛領域高精度地圖必須要滿足車道級的自動駕駛導航,為了能為自動駕駛車輛進行精準的轉(zhuǎn)向、制動等,地圖中除了需要包含車道線、車道中心線、車道屬性變化等道路細節(jié)信息,還需要包含道路的曲率、坡度、航向、橫坡等參數(shù),此外還應包含交通標志牌、路面標志等道路部件等,這些綜合信息數(shù)據(jù)一起構成了無人駕駛高精度地圖。
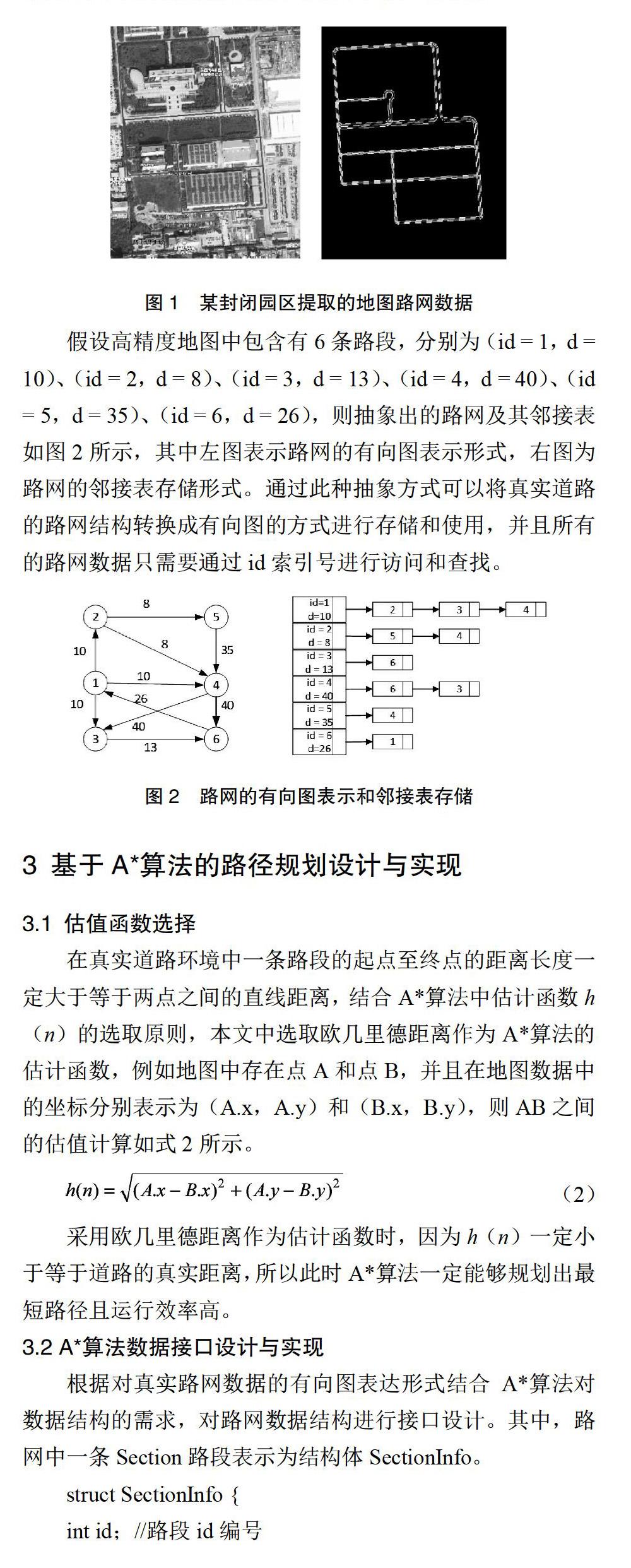
目前高精度地圖的主流形式有Opendrive和NDS兩種。本文中無人駕駛車輛所用的高精度地圖采用OpenDrive格式進行存儲,由于地圖數(shù)據(jù)元素眾多,而全局路徑規(guī)劃關注的是地圖路網(wǎng)的連接關系,所以必須先對其進行解析然后進行路網(wǎng)數(shù)據(jù)提取。我們需要從地圖數(shù)據(jù)中提取表示一條路段的必要元素:id號、起點、終點和長度以及連接關系,因為地圖數(shù)據(jù)中的路網(wǎng)連接關系是有方向的,為了將路網(wǎng)數(shù)據(jù)抽象為有向圖的形式進行表達,所以可將每條路段抽象為一個節(jié)點并將路段A的長度作為路段A到其相鄰路段權重,并最終采用鄰接表進行路網(wǎng)數(shù)據(jù)的表示,如圖1所示為從采集的高精度地圖中提取的路網(wǎng)數(shù)據(jù)(左圖中標紅的路線)。
3 基于A*算法的路徑規(guī)劃設計與實現(xiàn)
3.1 估值函數(shù)選擇
在真實道路環(huán)境中一條路段的起點至終點的距離長度一定大于等于兩點之間的直線距離,結合A*算法中估計函數(shù)h(n)的選取原則,本文中選取歐幾里德距離作為A*算法的估計函數(shù),例如地圖中存在點A和點B,并且在地圖數(shù)據(jù)中的坐標分別表示為(A.x,A.y)和(B.x,B.y),則AB之間的估值計算如式2所示。
采用歐幾里德距離作為估計函數(shù)時,因為h(n)一定小于等于道路的真實距離,所以此時A*算法一定能夠規(guī)劃出最短路徑且運行效率高。
3.2 A*算法數(shù)據(jù)接口設計與實現(xiàn)
根據(jù)對真實路網(wǎng)數(shù)據(jù)的有向圖表達形式結合A*算法對數(shù)據(jù)結構的需求,對路網(wǎng)數(shù)據(jù)結構進行接口設計。其中,路網(wǎng)中一條Section路段表示為結構體SectionInfo。
3.3 A*算法流程設計
A*算法在進行路徑規(guī)劃時,需要建立兩個列表用來進行輔助規(guī)劃搜索。一個是用來存放已經(jīng)被檢測過的節(jié)點列表Close_List,另一個是用來存放待檢測節(jié)點的列表Open_List。本文設計實現(xiàn)的A*算法具體步驟如下所示。
4 算法測試與驗證
4.1 實驗平臺
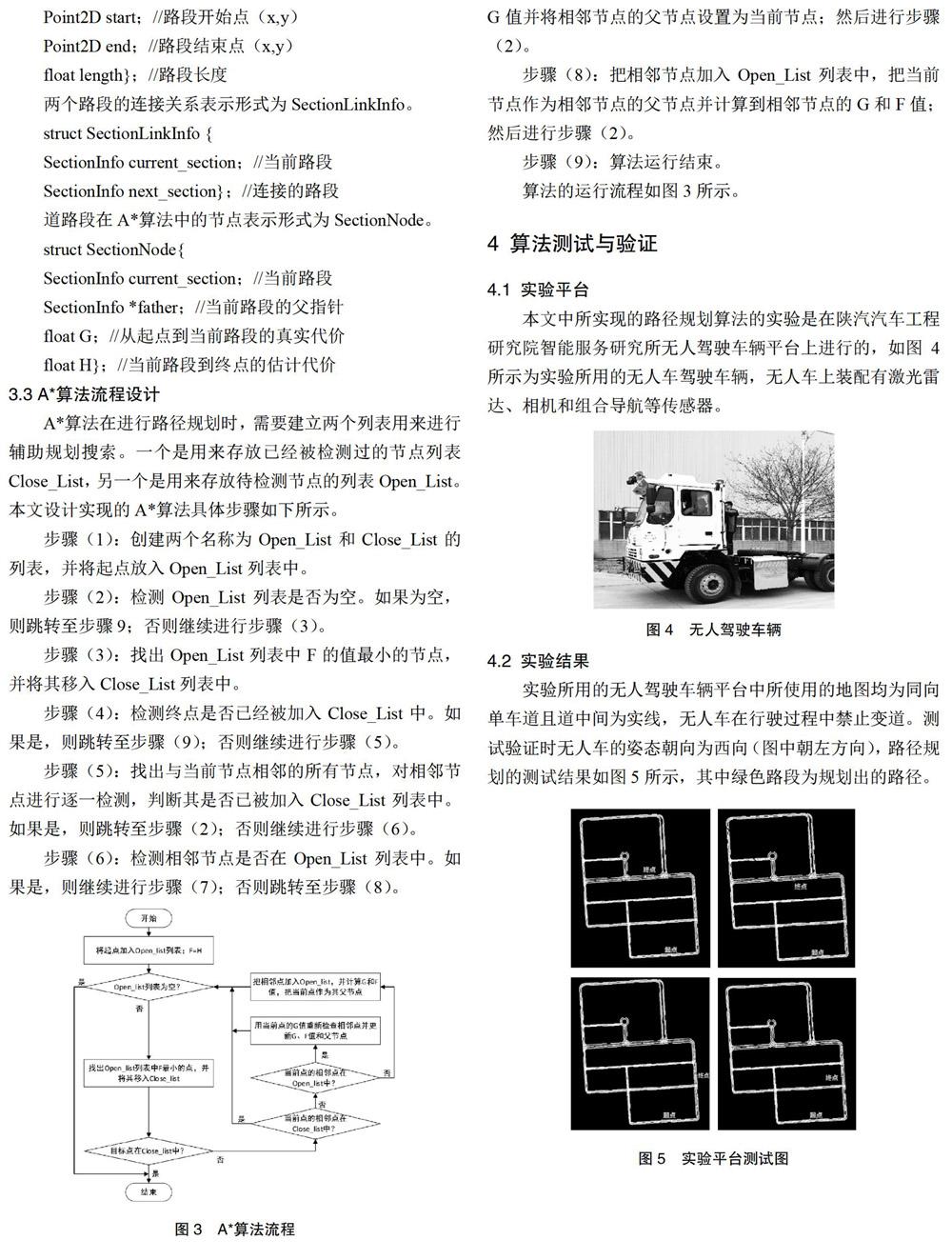
本文中所實現(xiàn)的路徑規(guī)劃算法的實驗是在陜汽汽車工程研究院智能服務研究所無人駕駛車輛平臺上進行的,如圖4所示為實驗所用的無人車駕駛車輛,無人車上裝配有激光雷達、相機和組合導航等傳感器。
4.2 實驗結果
實驗所用的無人駕駛車輛平臺中所使用的地圖均為同向單車道且道中間為實線,無人車在行駛過程中禁止變道。測試驗證時無人車的姿態(tài)朝向為西向(圖中朝左方向),路徑規(guī)劃的測試結果如圖5所示,其中綠色路段為規(guī)劃出的路徑。
5 結語
本文將A*算法應用于從高精度地圖數(shù)據(jù)中提取的路網(wǎng)上,可以高效準確地規(guī)劃出最短路徑。實驗結果表明采用A*算法能夠滿足封閉園區(qū)無人駕駛車輛對路徑規(guī)劃的需求,本文實現(xiàn)的路徑規(guī)劃模塊已經(jīng)部署在自動駕駛車輛平臺上并且可以很好的運行。
參考文獻
[1] 宋飛揚.無人駕駛汽車及其發(fā)展[J].中國高新科技,2019(05):24-27.
[2] 袁師召,李軍.無人駕駛汽車路徑規(guī)劃研究綜述[J].汽車工程師, 2019(05):11-13+25.
[3] ZAMIRIAN M,KAMYAD A V,F(xiàn)ARAHI M H. A novel algorithm for solving optimal path planning problems based on parametrizationmethod and fuzzy aggregation[J]. Physics Letters A, 2009.373(38).
[4] 朱大奇,顏明重.移動機器人路徑規(guī)劃技術綜述[J].控制與決策, 2010.25(7):961-967.
[5] 黃金豪,吳建悍.基于改進A*算法的室內(nèi)服務機器人路徑規(guī)劃[J].技術與市場,2020,27(03):62-63.
[6] 趙曉,王錚,黃程侃,等.基于改進A*算法的移動機器人路徑規(guī)劃[J].機器人,2018,40(06):903-910.
[7] 張廣林,胡小梅,柴劍飛,等.路徑規(guī)劃算法及其應用綜述[J].現(xiàn)代機械,2011(5):85-90.
[8] 武雅杰,楊晶東.基于A*算法的機器人路徑規(guī)劃[J].電子科技,2017, 30(06):124-127.