電動汽車城市行駛工況構建方法研究
2020-12-15 07:00:46闕海霞宋若旸蘭海潮王露馬宗鈺
汽車實用技術 2020年22期
闕海霞 宋若旸 蘭海潮 王露 馬宗鈺
摘 要:為描述西安市電動汽車行駛狀況,選取三種方法構建工況:聚類法、V-A矩陣法、馬爾科夫法。對試驗獲得的數據先進行降噪平滑處理,然后采用短行程法劃分運動學片段,最后根據不同方法合成了C-SHT工況、C-VA工況、C-PKMMC工況。通過計算三種工況與原始數據的誤差,發現C-PKMMC工況的誤差最小,為4.94%,而其他倆個分別為7%和9.35%。可以得到馬爾科夫法構建的工況既滿足行駛工況合成的要求,同時也提高了行駛工況的精度。
關鍵詞:聚類法;V-A矩陣法;馬爾科夫方法;短行程法;相對誤差
中圖分類號:U469.72? 文獻標識碼:A? 文章編號:1671-7988(2020)22-10-04
Abstract: In order to describe the driving situation of electric vehicles in Xi'an, three methods of constructing working conditions were selected: Clustering method, V-A matrix method, and Markov method. For the data obtained from the experiment, the noise reduction and smoothing process is first performed, and then the short-stroke method is used to divide it into kinematics fragments. Finally, the C-SHT working conditions, C-VA working conditions, and C-PKMMC working conditions are synthesized according to different methods. By calculating the error between the three working conditions and the original data, it is found that the error rate of the C-PKMMC working condition is the smallest, which is 4.94%, while the other two are 7% and 9.35%, respectively. The working conditions constructed by the Markov method meet the requirements of driving condition synthesis, and also improve the accuracy of driving conditions.
Keywords: Clustering method; V-A matrix method; Markov method; Short-Stroke method; Relative error
CLC NO.: U469.72? Document Code: A? Article ID: 1671-7988(2020)22-10-04
前言
汽車作為人們日常生活出行的主要工具,其能量消耗和排放是目前存在的最大問題。汽車行駛工況[1]它反映了某一區域汽車行駛過程的各項性能指標,其中包括了汽車的能耗和排放,可為汽車的動力性匹配、經濟性分析、控制策略優化等提供理論依據。
吉林大學野晨晨等[2]由于實驗室臺架測量構建汽車行駛工況的方法存在諸多誤差,從而提出車載測試法,即在實際車輛行駛過程中采集數據。該方法避免了實驗室測量數據的誤差同時保證了構建工況的合理性。姜平,石琴等[3]于2009年提出基于馬爾科夫的行駛工況構建方法。將汽車行駛工況看作一個隨時間變化的馬爾科夫過程,提出了狀態轉移概率與相似性檢驗相結合的候選工況選擇方法,建立了特征參數的評價準則,大大提高了行駛工況的精度。2012年石琴,仇多洋等[4]又提出了主成分分析法確定表征道路運行的特征參數,同時采用模糊C均值聚類法對運動學片段進行分類,進一步提高了構建工況的精度。本文將結合以上方法對行駛工況的構建進行研究,分析比較各方法精度。
1 試驗規劃與設計
以西安市為例,本文選擇一款純電動汽車為試驗車輛;根據西安市不同類型道路的交通流量和占比以及里程數設計了試驗路線[5]。試驗采用平均車流法采集車輛行駛過程中的相關數據,試驗時間設計為每天的早、中、晚三個時間段,連續進行一周的試驗,共得到169999組數據。試驗中數據的采樣頻率為1Hz。
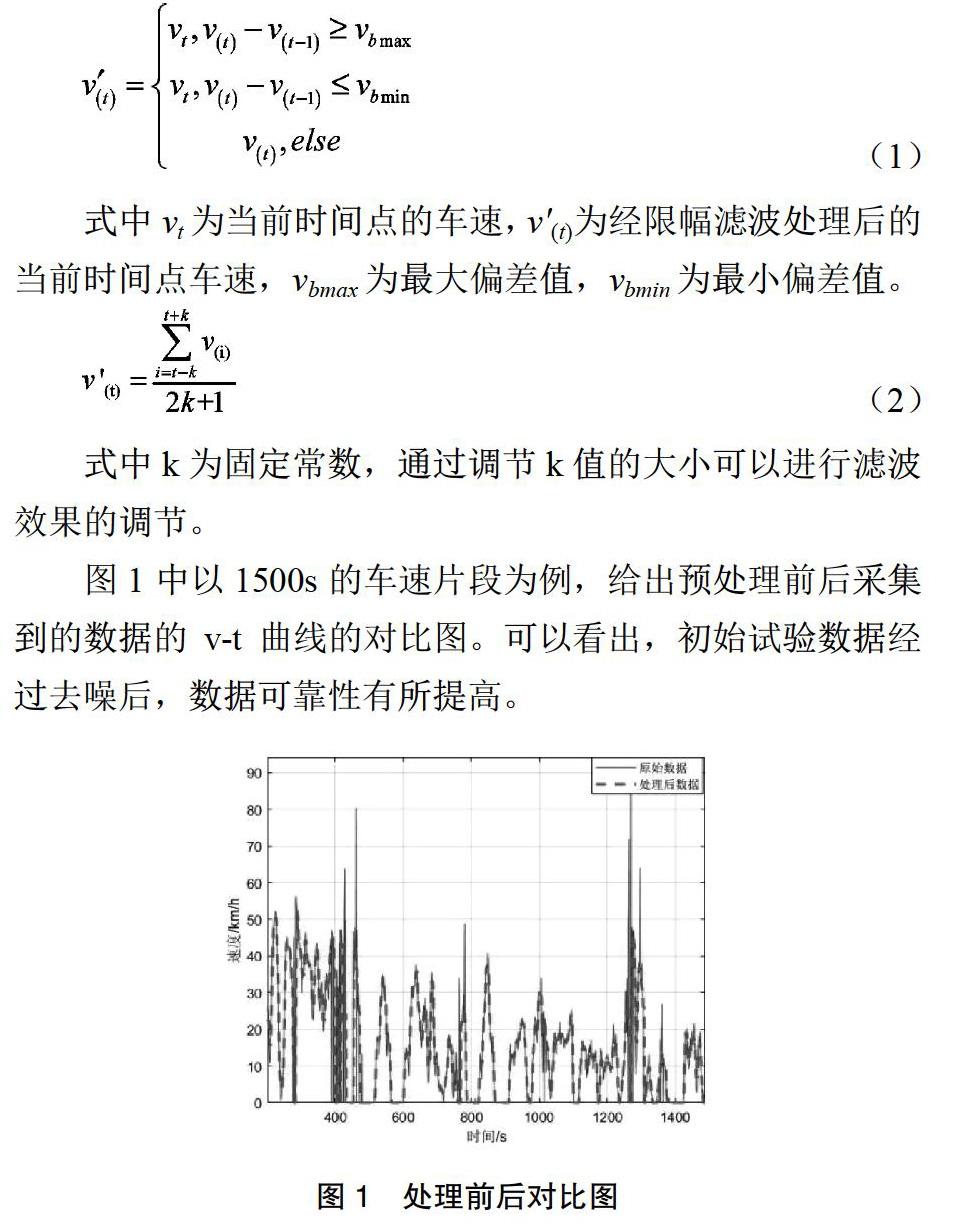
行駛過程中的操作失誤和突發狀況等會使得采集到的數據存在異常,這會影響構建工況的精度。因此需要對試驗數據進行預處理。本文主要采用了脈沖噪聲和高頻噪聲去噪[6]。對于脈沖噪聲,本文選擇限幅濾波法。限幅濾波法是根據所得信號變化來判斷是否處于合理范圍,這種方法對脈沖噪聲的去除效果顯著。對于高頻噪聲,本文選擇遞推。這種方法可以實時處理高頻噪聲,對于高頻噪聲有很好的抑制效果。下式(1)為限幅濾波函數,式(2)為平均濾波算法。
2 工況構建
2.1 工況構建方法分析
結合近年來常用的工況構建方法,主要選擇[8]聚類分析法,V-A矩陣分析法,馬爾科夫分析法這三種方法來構建工況。
2.2 聚類分析法
聚類分析法是根據劃分好的運動學片段,結合主成分分析與聚類分析法,對片段進行分類,最后篩選出每一類中最具代表性的片段,將這些片段合成時長為1200s的工況。
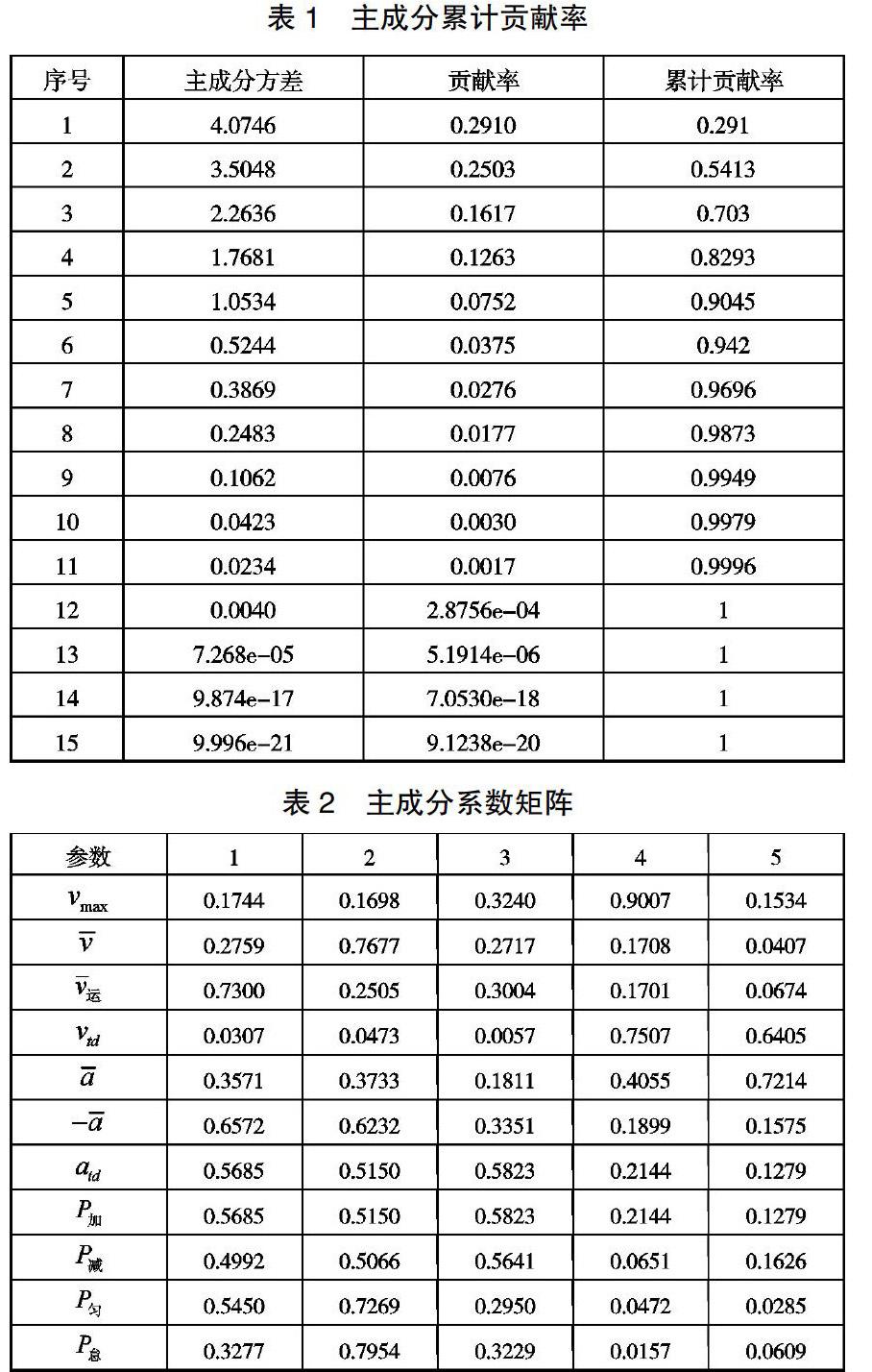
描述運動學狀態的參數有很多,為了準確、全面的描述各運動學片段的特征,本文先選取了15個代表性特征參數進行利用主成分分析,得到各成分貢獻率,結果如表1所示。在主成分分析過程中,累計貢獻率越高,保留的原始數據信息就越多,為了不丟失主要信息,一般規定保留的主成分方差累計貢獻率應超過85%。綜合考慮,本文選取了前5個主成分分析。表2是所得的主成分系數矩陣,最終選取最大車速、平均車速、平均運行速度、速度標準差、平均加速度、平均減速度、加速度標準差、加速比例、減速比例、勻速比例、怠速比例這些能夠反映運動學片段特征的參數。
K-means算法是一種通過均值對數據點進行聚類的算法[9]。該算法首先設定K個樣本作為聚類中心,然后計算這些聚類中心與每個樣本點的距離,根據最小距離就近劃分樣本。每個樣本點距中心點的距離稱為歐式距離,如下公式所示:
2.3 V-A矩陣分析法
V-A矩陣分析法是通過計算片段的V-A矩陣與原始數據的V-A矩陣的相似系數,從而選擇相似系數高的合成最終工況。
本文根據數據試驗所得,在試驗過程中,電動汽車的車速一般不超過70km/h,所以本文設置速度上限為70km/h;同時綜合實際道路情況和收集到的數據,設置加減速度區間為[-2.5,2]m/s2。取時間隔速度5km/h,加速度間隔0.5m/s2,計算處于相關速度與加速度范圍內數據出現的概率,構成9×14的V-A矩陣,具體參考文獻[11]。由于一些數據出現概率極低,概率小于10-3的數據認定為0。接著,計算每一片段V-A矩陣與原始數據V-A矩陣的相似系數Ω,如公式(5)。相似系數越高,片段與樣本總體越相似,所構成的工況越貼合實際。因此,將候選片段按照Ω排序,選擇Ω高的候選片段,其構成的工況曲線如下圖3。
2.4 馬爾科夫分析法
馬爾科夫分析法相對于其他方法優點是利用馬爾科夫方法進行處理,保留了車輛實際行駛過程中速度及加速度變換的隨機性。本文劃分片段后,采用主成分分析和聚類分析法對片段進行分類(如上文2.2所示),然后利用MATLAB軟件編程根據最大似然估計法得到6類之間的馬爾科夫狀態轉移概率矩陣P,如下:
(1)選擇起始片段[12]。本文選擇相關系數ρ最大的片段作為起始片段;
(2)選擇中間片段。利用MATLAB軟件隨機生成處于0-1之間均勻分布的隨機數,依據產生的隨機數與生成的狀態轉移概率矩陣確定下一片段,以此方法不斷選擇,直至備選片段的累計時間達到理想長度;
(3)選擇合適的備選工況。由于馬爾科夫-蒙特卡洛方法構建的工況具有一定的隨機性,構建一次,不能完全代表最終工況,因此需要利用該方法進行多個備選工況的構建。最終將備選工況與原始數據進行對比,選擇誤差最小的備選工況為最終合成的工況C-PKMMC,如圖4所示。
3 工況對比
構建工況的方法很多,本文選取了近年來最為典型的三種方法進行工況的合成,根據最終合成的工況,可以分析三種方法的特點。誤差法是最常用的衡量構建工況優劣的方法,公式見式(7),表3為三種工況的特征值參數與總數據的特征參數的相對誤差(%)。
由上表可知,三種方法構建的工況與總數據都存在一定的誤差。C-SHT工況由于不同的聚類方法對于最終合成的工況與原始數據的誤差也不同,本文選擇的K-means聚類方法是根據中心點求均值的聚類,最終誤差為7%。C-VA工況誤差較大,為9.35%。但是該工況與總數據相似性高,如對構建工況有嚴格的長度限制時,尤其是長度較短的工況構建時,該方法較為適合。C-PKMMC工況的平均誤差為4.94%,遠小于其他兩種方法。其中最高車速、平均車速和平均運行車速的誤差相對較高。由圖4可知,車速超過50km/h的片段只出現一次,大多數片段的最高車速在30-40km/h車速范圍內,加速度與減速度在合理范圍內,相對較為平穩。根據以上分析,C-PKMMC工況的相對于前兩個工況,出現車速較高的現象,這與工況構建方法有關,但也在合理的范圍內,比較符合實際。
本文描述的三種構建工況的方法,馬爾科夫法相對優于其他兩種方法,其既保持一定的隨機性,又保證連接片段之
間的關聯性,使得構建的工況更貼合實際道路情況,更適合電動汽車西安城市道路工況的構建。
4 結論
本文首先設計電動汽車行駛工況試驗方案,進行數據采集以及數據預處理。將采集到的數據進行降噪平滑處理后,采用短行程法劃分數據片段。接著,本文使用了三種構建工況方法:聚類分析法、V-A矩陣分析法和馬爾科夫分析法,其中采用主成分分析確定了數據的特征參數。聚類法在此基礎上通過K-means聚類分析對運動學片段進行劃分,最后,根據偏差度合成C-SHT工況;V-A矩陣法則通過計算運動學片段與原始數據的V-A矩陣的相似性,從而選取相似性高的片段合成C-VA工況;馬爾科夫法則在聚類法的基礎上結合靜態蒙特卡洛方法合成C-PKMMC工況,具有一定的隨機性,但更符合實際道路情況。通過計算三種構建工況與原始數據的特征值相對誤差,發現C-PKMMC工況的誤差率最小,也最能代表西安城市工況,反映試驗地區的交通特征,提高了行駛工況的精度。
參考文獻
[1] 李耀華,劉鵬.西安市純電動城市客車行駛工況研究[J].中國科技論文,2095-2783(2016)07-0745-06.
[2] 野晨晨,張洪坤,范魯艷,等.沈陽市乘用車城市道路工況試驗研究[J].科學技術與工程,2017,17(21):241-247.
[3] 姜平,石琴,陳無畏.基于馬爾科夫的城市道路行駛工況構建方法[J].農業機械學報,2009,40(11):26-30.
[4] 石琴,仇多洋,吳靖.基于主成分分析和FCM聚類的行駛工況研究[J].環境科學研究,2012,25(1):70-76.
[5] 邵偉.蒙特卡洛方法及其在一些統計模型中的應用[D].濟南:山東大學,2012.
[6] 張思遠.乘用車城市行駛工況及能量管理策略研究[D].西安:長安大學,2018.
[7] 鄭殿宇,吳曉剛,陳漢,等.哈爾濱城區乘用車行駛工況的構建[J].公路交通科技,2017,34(4):101-107.
[8] 李忠玉.西安城市工況構建及混合動力客車動力系統參數匹配研究[D].西安:長安大學,2018.
[9] 余曼,趙軒,魏朗,等.基于FCM聚類算法的電動車城市循環工況構建[J].公路交通科技,2018,35(10):140-149,158.
[10] 藺宏良,余強,張雪莉.市區道路車輛行駛工況研究進展[J].機械科學與技術,2014,33(2):282-288.
[11] 張璇.西安市公交工況構建方法研究[M].長安大學,2017.
[12] 姜平.城市混合道路行駛工況的構建研究[M].合肥工業大學, 2011.