基于模式回溯的#WS(≠)快速定界算法
2020-12-09 09:46:46翟治年盧亞輝潘志剛周武杰
小型微型計算機系統 2020年12期
關鍵詞:資源
翟治年,盧亞輝,俞 堅,潘志剛,周武杰,3
1(浙江科技學院 信息與電子工程學院,杭州 310023)2(深圳大學 計算機與軟件學院,廣東 深圳 518060)3(浙江大學 信息與電子工程學院,杭州 310027)
1 引 言
工作流可滿足性(Workflow Satisfiability,WS)關系到業務安全策略與執行資源分配的協調與否,是安全規劃的一項關鍵驗證[1,2],并具有執行場景發現問題(Scenarios Finding Problem,SFP)[3]等重要的應用變體.為定量考查WS實例的可滿足性,并擴展可滿足判定的途徑,文獻[4,5]提出了相應的計數問題(Counting Workflow Satisfiability,#WS).它是#CSP(Counting Constraint Satisfaction Problem)[6,7]的特殊形式,具有特定于業務安全的約束配置、可能的流程相關性[2],步驟數量受限[8]、約束稀疏[9]等特征.在應用上,#WS與安全工作流的資源彈性[10,11](部分資源失效時的WS)問題有密切關系,為其提供了參考指標和驗證手段[4,12].近年來,云制造[13]、眾包[14]等依賴于第3方資源的新型工作流環境得到了蓬勃發展.此類資源具有虛擬、分散、多變等特性,失效和違約風險較高[15],使業務安全規劃的資源彈性要求變得日益突出,亟待加強#WS等相關問題的研究.
在基本的互斥約束下,#WS已進入#P完全問題類[16],較NP完全問題更為困難[17].而其全局計數要求又很難適用局部和智能搜索方法.特別地,在第3方資源環境下,候選資源數量大大超過工作流步驟[10,18,19],給#WS算法造成了新的性能壓力.
現有#WS研究集中在常見的互斥和綁定約束下.其核心問題是僅含互斥約束的#WS(≠)(綁定約束可以多項式時間消去[5]),在求解性能上已取得了一定進展.2015年,文獻[5]將#WS(≠)歸約為邏輯可滿足計數問題(Counting SATisfi ability,#SAT)[20],借助其高效求解器sharpSAT,取得了一定的實測時間性能.由于歸約所得邏輯變量規模巨大,整體時間復雜度高達O*(2|R||S|),其中S和R分別為步驟集和資源集.且其所用組件緩存技術極耗內存,空間復雜度也達到同一量級,綜合性能很受局限.2016年,文獻[4]利用基于賦權集容斥原理和快速zeta變換的集合劃分方法,建立了一種#WS(≠)的動態規劃算法,具有O*(2|S||R|)時間復雜度,但其空間復雜度仍為指數級,實際占用增長很快.2016年,文獻[9]通過樹分解技術來利用約束圖的結構信息,應用樹分解回溯計數的方法(Counting Backtracking Tree Decomposition,#BTD)求解#WS(≠),并對約束驗證范圍進行了簡化,較前述工作更好地控制了空間開銷.而其時間復雜度為O*(|R|W+1),其中W為約束圖樹分解寬度.在工作流應用常見的低約束密度條件下,W的值通常受限,因而該算法有比較明顯的時間性能優勢.但其對大量資源帶來的性能壓力,缺乏有效的約簡機制.
最近,在WS研究中提出了一種模式回溯法[21,18,22].在互斥等資源獨立性約束條件下,可以有效克服資源集規模造成的解空間膨脹問題,并利用回溯法的優化技術積累.本文將根據模式回溯法的的兩層求解機制,通過精確的模式可行解計數,結合模式資源指派圖的匹配數量定界,提出一種# WS(≠)定界算法.實驗表明,該算法在高資源配比、低約束密度條件下,能夠快速計算#WS(≠)解的上、下界,且其上界比較接近于精確解.
2 預備知識
WS以一組工作流步驟S為變量集、每個s∈S有一個值域Rs?R,其中R是所有資源的集合.對步驟變量的取值,有一組約束C.WS(≠)是C中僅含互斥約束的WS.任何互斥約束c都作用于兩個變量,要求它們取值不同.WS(≠)的目標是求任意一個可行解,即從S到R的一個賦值映射,使其滿足所有約束和(各變量的)值域要求,或指出可行解不存在.而#WS(≠)的目標是統計WS(≠)可行解的數量.通常有解空間搜索或動態規劃兩種求解途徑.
任何部分賦值,即從T?S到R的映射,都有其劃分模式:當且僅當兩個變量賦值相同時,將其歸入同一個塊,相應塊的集合形成賦值變量集T的一個劃分,稱為模式.每個模式都是一組部分賦值的抽象.由此可以得到問題解空間的一個壓縮映像,即模式空間.它是一棵以模式為結點的根樹,描述了對空劃分逐個加入新變量,最終擴展至完全模式的可能路徑.其葉結點對應于所有完全模式.
部分賦值滿足互斥約束c(即其給c的兩個變量分配不同的值),當且僅當其模式滿足c(即其將c的兩個變量分入不同的塊).若對模式空間進行搜索,發現一個模式違反約束,即可排除以其為模式的所有部分賦值,非常高效.然而,問題解空間是根據值域構造的,搜索時只需要驗證約束.而壓縮為模式空間后,相應于模式結點的部分賦值不一定符合值域要求,從而需要驗證.文獻[18]解決了模式真實性驗證(根據一個模式判定相應的部分賦值有無可能滿足值域要求)的問題,使得可以對模式空間進行回溯搜索,通過可行模式得到WS(≠)的可行解.驗證模式真實性的主要思路是給定任意模式P,為每個塊b∈P計算恰當的資源指派鄰域Nb?Rb=∩s∈bRs,這里Rb稱為塊b的值域.根據P中所有塊的鄰域,可得(資源)指派圖G(P).存在符合WS(≠)值域要求且以P為模式的部分賦值,當且僅當二分圖G(P)存在左(塊側)到右(資源側)完備匹配.按此匹配為完全可行模式各塊中的步驟分配資源,即得WS的一個可行解.特別地,文獻[18]利用子模式相對父模式只有一個差異塊的特點,實現了增量式的真實性判定.只須計算差異塊的鄰域,并計算從差異塊出發的增廣路,即可將父模式指派圖擴展為子模式指派圖,并由前者的匹配修改得到后者的匹配.
3 #WS(≠)的模式回溯定界
現有模式回溯法僅適用于WS(≠).若需統計所有可行解的數量,不僅要相應改變算法結構,而且所得算法將面臨著更嚴重的性能壓力.模式空間不僅實現了整個問題解空間的壓縮,而且將部分賦值歸類為一個個的模式.相對于平面化的搜索空間,這種層次性有利于從宏觀上確定可行解數量的界,在保證一定結果質量的前提下降低計算負擔.本文在文獻[18]剛剛提出的增量模式回溯法基礎上,為#WS(≠)建立了一種模式回溯定界算法(Bounding Algorithm Based on Pattern Backtracking).其問題求解思路可概括為以下幾點:
1.對每個模式P,均使用完全指派圖(對塊b∈P,Nb=Rb),以防統計時遺漏可行解.WS(≠)求任意一個可行解,在可行解存在性等價的前提下,可以使用更為精簡的指派圖來提高效率.而#WS(≠)不能遺漏任何可行解,只能使用完全指派圖(每個塊的指派鄰域都等于該塊的值域).
2.每個(左到右完備)匹配都可將完全可行模式轉化為一個真實可行解,不同匹配的轉化結果不同.故找到完全可行模式后,對其資源指派圖中的匹配數量計算上、下界,即為此模式所含可行解數量的界.而在驗證模式真實性時,只關心匹配的存在性,求一個匹配即可.
3.用回溯法遍歷模式空間,對每個完全可行模式,計算其所含可行解數量的界,并相加匯總.
4.適當利用約束圖和指派圖的結構信息.通過連通片分解,由前者/后者得到獨立的# WS(≠)/二分圖匹配計數子問題,分別求解,并相乘匯總.
下面給出具體算法.先由上述思路第4點得主控函數.
算法1.#MAIN//計數主控函數
輸入:S、R、 {Rs|s∈S}和C作為全局變量可用,其中C只含互斥約束.
輸出:WS(≠)可行解數量下界LB和上界UB.
1.LB←1;
2.UB←1;
3.分解S和C構成的約束圖,得一連通片集Comps;
4.for(compi∈Comps){
5.Si←V(compi);//V(compi)是compi的頂點集
6.Ci←E(compi);//E(compi)是compi的邊集,每邊對應一條互斥約束
7. 〈LBi,UBi〉←#IPB≠(?,?,?,Si,Ci);
8.LB←LB·LBi;
9.UB←UB·UBi;
10.}
11.return〈LB,UB〉;
其中調用了如下模式回溯計數算法.它體現了前述思路的第1、3兩點.
算法2.#IPB≠(P,&G,M,Si,Ci) //遞歸過程
輸入:已滿足約束和值域要求的模式P;其完全指派圖G=G(P),&表示傳址;M是G的左到右完備匹配,其大小為|P|;Si和Ci表示一個連通片內的變量集和約束集.
輸出:在Si和Ci導出的WS子問題中,其模式擴展于P的可行解數量下界LBi和上界UBi.
1.LBi←0;
2.UBi←0;
3.if(|∪P|=|Si|){//子問題的完全可行模式
4. 〈LBi,UBi〉←#MATCH(G);//P為滿足C的完全模式,對其指派圖中符合值域的匹配數進行界定
5.}else{
6. 按一定排序規則選擇擴展變量s;//參見文獻[18]
7. 計算用s擴展P形成的滿足C的模式集X(P);
8. for(Pj∈X(P)){//有未搜索的子模式
9. 基于G計算Pj的完全指派圖Gj=G(Pj);//指派圖增量計算,參見文獻[18]
10. 基于M計算Gj的左到右最大匹配Mj;//匹配增量計算,參見文獻[18]
11. if(|Mj|=|Pj|){//Mj完備
12. 〈LBij,UBij〉←#IPB≠(Pj,Gj,Mj,Si,Ci)//遞歸調用;
13.LBi←LBi+LBij;
14.LBi←LBi+LBij;
15. }
16. 恢復G;//利用增量計算時備份的差異信息
17. }//for
18.}//if-else
19.return〈LBi,UBi〉;
相對于用模式回溯求解WS(而不是#WS),需要注意第16行恢復指派圖是無條件的,并非模式驗證失敗或發生回溯時才進行.算法2可以對完全可行模式進行精確計數.但為了進一步得到真實可行解的數量界,須調用如下的匹配計數定界算法(其中函數LV()和RV()分別取二分圖的左側和右側頂點集).它體現了前述思路的第2、4兩點.
算法3.#MATCH(G)
輸入:從模式(劃分塊的集合)到資源集的二分圖G
輸出:其左到右完備匹配數量的下界lb和上界ub.
1.lb←1;
2.ub←1;
3.對二分圖G進行分解,得到連通片集GComps;
4.for(gcompk∈GComps){
5. if(gcompk是完全二分圖) {
6.p←0;//p表示已考查的左側頂點數
7. for(b∈LV(gcompk)){//對每個左側頂b
8.lb←lb·(|RV(gcompk)|-p);
9.p←p+1;
10. }
11.ub←lb;//可精確計數,上下界重合
12. }else{//非完全
13.lb←1;
14.p←0;//p表示已考查的左側頂點數
15. for(b∈LV(gcompk)){//對每個左側頂b
16.ub←ub·min{|Rb|,|RV(gcompk)|-p};
17.p←p+1;
18. }
19. }//if-else
20.}
在算法3中,對二分圖進行連通片分解后,逐連通片計算匹配數上、下界.若連通二分圖是完全的,不難精確計算其匹配數,由第6-第11行代碼完成.否則,由第13-第18行代碼進行定界.因為可行模式的指派圖必然存在匹配,第13行將下界取1.而上界由第15-第18行代碼計算,其基本思路是將每個左側頂點的值域大小相乘.但是左側頂可匹配的鄰域還會受到一定限制.設b是連通二分圖中第p+1個被檢查的左側頂點.事實上之前每檢查一個左側頂,都是從其可匹配的鄰域中隱含地選擇一個右側頂,形成一條擬匹配邊,得到一個更小規模的匹配子問題.刪除這一對頂點及其所有關聯邊,不影響子問題的計數.因此檢查到第p+1個左側頂時,在相應的子問題中,至多有RV(gcompk)-p個右側頂可匹配.應取其與|Rb|的較小者作為b可匹配的鄰點數上界.
整體上,算法1和現有的模式回溯WS算法一樣,至多對O*(B|S|)(B|S|表示第|S|個貝爾數)個模式結點進行檢查,每個結點處的驗證開銷為多項式級.算法1要對每個完全可行模式進行匹配計數,但由算法3易知,此過程可在多項式時間完成.因此,算法的整體時間復雜度仍為O*(B|S|).算法1沒有特殊的空間需求,和模式回溯WS算法一樣,具有多項式級空間代價.
4 實驗研究
現在對算法1進行實驗研究,并與文獻[5]的sharpSAT歸約(R2sharpSAT),文獻[4]的#DP和文獻[9]的#BTD簡化(#BTD-S)算法對比.測試環境為主頻3.6GHz/睿頻4.2GHz的Intel Core i3 CPU、8G RAM、CentOS 8系統、GNU C++編譯器(-O3優化)、GMP6.2大整數庫,單個實例執行時限為半小時.
實驗1.4種#WS(≠)算法的性能對比
本實驗將4種算法在不同步驟數量和資源配比下進行綜合性能比較.由于互斥約束通常作用于職責分離的關鍵步驟,故取較低的約束密度.測試實例生成規則是:在[10,20]之間隨機生成20個值,得到相應大小的S;對每個S,隨機取25≤μ≤75,得到μ%|S|大小的R(μ%稱為資源配比);再從代表分散(D)、低(L)、中(M)、高(D)的4個區間{[1,100],[1,33],[34,66],[67,100]}中隨機選擇授權比例區間AP,對每個s∈S,隨機選取α∈AP,再隨機取α%|R|個不同資源作為Rs;隨機取5≤ω≤15,以概率ω%(稱為約束密度)決定每對步驟之間是否存在互斥約束,得到C,并保持其它參數不變,重復生成5次C,相應得到一組5個同參數實例,測試時對每組的解出實例取平均結果.4種算法測得的解出率(用SP表示)、執行時間、峰值空間如表1所示.
首先將算法1與#BTD-S比較.可以看到隨著實例規模的變化,兩者的空間占用均保持較小的值,且彼此差距不大.因為#BTD-S具有全局動態規劃與局部回溯相結合的算法結構,所以帶有子問題解的緩存,更耗空間一些.算法1在12/20組實例上,平均空間占用不大于對方,略有優勢.在各組實例上,算法1的解出率均不低于對方.這主要源于算法1的執行時間優勢.算法1在與對方解出率相同的15/20組實例(不含第20組實例,兩者均解出2/5,但具體實例不全相同,也不含#BTD-S無數據的第19組實例)上,所需的執行時間也較少,其性能是對方的1.18-368倍不等,平均為54.9倍.在剩余3組兩者均完全解出的實例上,#BTD-S的性能是算法1的10.6-18.2倍,平均14.7倍.整體上,算法1有很明顯的時間性能優勢.
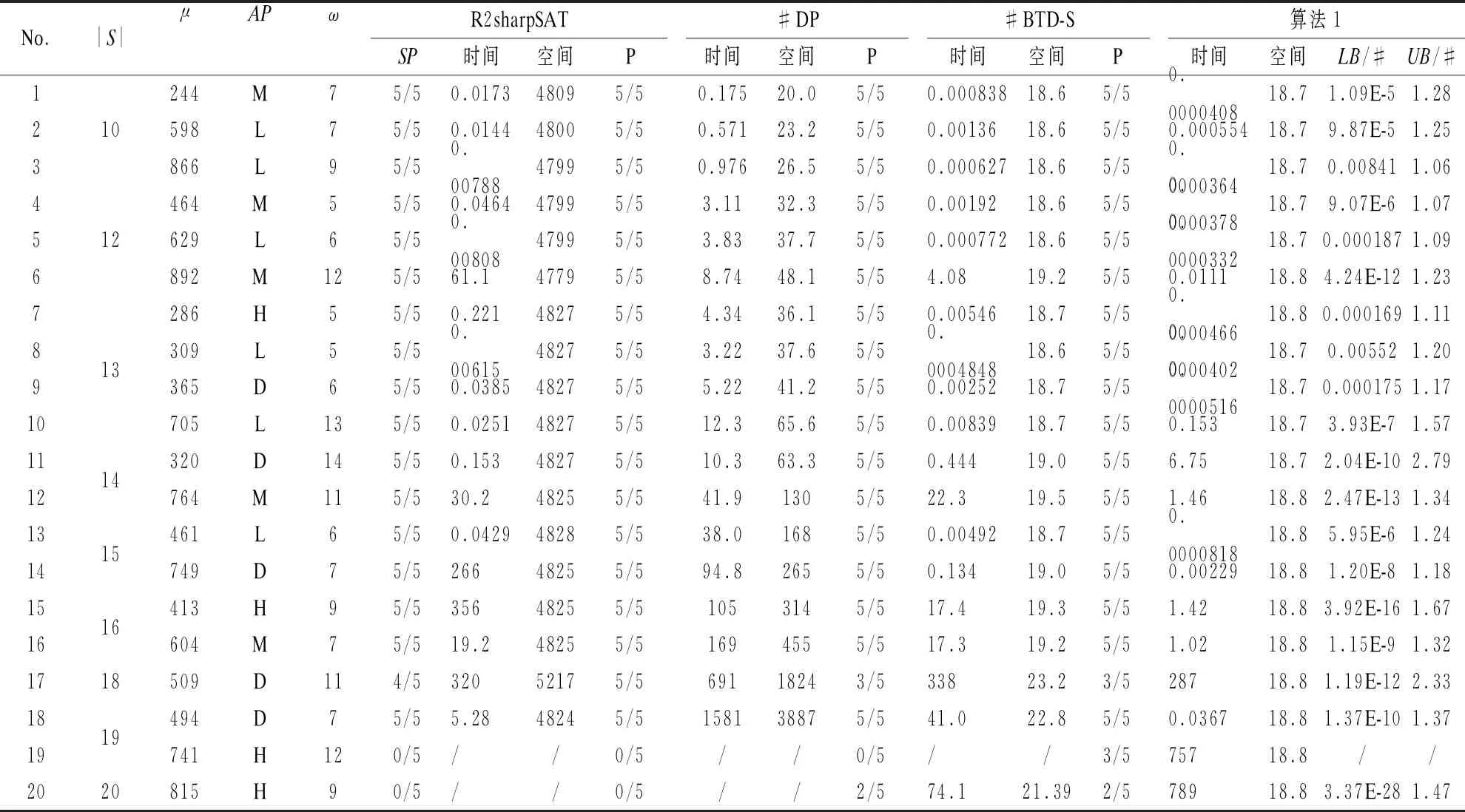
表1 4種#WS(≠)算法的時間(s)和空間(MB)代價Table 1 Cost of time(s)and space(MB)for the 4 #WS(≠)algorithms
將算法1與#DP比較.由于多項式和指數空間復雜度的差異,算法1有明顯的空間性能優勢.由表1可以看到,#DP的空間占用始終高于算法1,且隨著|S|的增大,差距不斷擴大,從1.07倍增長到207倍,平均為22.1倍.#DP的時間復雜度低至2的指數級,較算法1更有優勢.測試表明,在8G內存和半小時限制下,#DP解出了第17組的全部5個實例,而算法1有2個未解出.除此以外,算法1的解出率均不低于對方.在兩者均完全解出的17組實例上,算法1的時間性能均優于對方,比率為1.53-464548倍不等,平均為62019倍.這主要是由于#DP通過系統、規整的計算來控制時間復雜度,且初始開銷很高,對小規模的實例并無優勢.而對于稍大規模的實例,#DP會很快遭遇空間性能的瓶頸.因而其僅在|S|=18(第17組實例)這樣的過渡區域,表現出了一定的優勢.在時間特別是內存資源受限條件下,算法1的整體優勢更為明顯.
將算法1與R2sharpSAT比較.R2sharpSAT始終具有很高的空間占用,達到算法1的258-278倍,平均258倍.R2sharpSAT的空間代價主要由組件緩存導致,由于使用了緩存清理技術,并未隨問題規模明顯增長.在解出率上,R2sharpSAT也在第17組實例上超過了算法1,多解出了1個實例.但其在第19和20組實例上解出率均為0.算法1在與對方解出率相同的17/20組實例上,有15組優勢,時間性能達到對方的18.8-116157倍不等,平均8151倍,有2組劣勢,對方性能是算法1的6.10和44.1倍.算法1仍然有整體上的優勢.
總體上,算法1的綜合性能比較突出.其空間性能僅在個別實例上弱于#BTD-S,時間性能在多數實例上有明顯優勢,但在極少數實例上弱于其它算法.這種優勢首先來源于模式空間對原始解空間的壓縮,其搜索范圍只取決于步驟數量,是與資源數量無關的.同時,在低約束密度下,約束圖結構較為松散,容易形成多個連通片,降低子問題的步驟數量.進而,在葉結點處計算匹配數時,沒有采用指數時間的動態規劃精確計數,而是盡可能分解二分圖,然后通過快速方法定界,使前述兩點優化的效果得以保持.相形之下,#BTD-S雖然也較好控制了內存占用,但其側重于對約束圖的結構進行深入的分解,對于大量資源造成的解空間膨脹問題,缺乏有效的解決機制.而其它兩種算法整體上較#BTD-S更弱,很大程度上是受空間性能制約.當然,其它算法均給出精確的可行解數量,而算法1只能給出其上、下界.表1進一步給出了算法1的界相對其它算法所得精確值的比率(組內各比率求平均,第20組只計算了與#BTD-S共同解出的1個實例).可以看到,其上界質量較好,為精確解的1.06-2.79倍,平均1.41倍.
實驗2.算法1時間性能隨資源配比的變化
如前述,每組實例主要有|S|、資源配比和約束密度3個參數.由實驗1可以看到,算法1的解出率和時間性能隨著|S|的增大,大體上呈現下降的趨勢.工作流應用中,約束密度通常較低,變動不大.而在當前常見的第三方資源環境下,資源配比|R|/|S|向上波動的空間很大.根據實驗1的測試情況,我們選擇|S|=15,取ω=10,在20%、50%、80%三種授權比例下,讓資源配比從4到20,以步長4變化,進一步了解算法1解出率、執行時間和所得界的變化.為消除約束分布偶然性影響,每組參數生成50個實例,結果如表2所示.

表2 算法1執行時間(s)隨資源配比的變化Table 2 Variation of the run-time(s)of algorithm 1corresponding to the ratio of resource
首先,資源配比的增大,使得80%授權的第5組出現了2個未解出實例.進一步觀察可知,隨著資源配比的增加,平均執行時間大體呈增加趨勢.對于偏離趨勢的20%授權第3組實例和50%授權第2組實例,相應的最大執行時間也偏高.異常與這些個別值拉高平均值有關.另外,50%授權的第4組和第5組實例平均值接近,但第5組實例的最大值偏低,其平均值主要源于集體貢獻.對原始數據進行統計,可知第5組較大的值更多,其中位數是第4組的6.2倍,且有37個值不小于第4組的中位數.對于同樣的|S|,模式空間的大小是固定的.上述執行時間隨資源配比增長的趨勢,主要是因為在搜索結點處,為計算模式塊的值域,需要在更大的資源范圍中搜索.當其它條件一定時,更多資源會導致更多滿足約束和值域要求的賦值,故表2中無論LB還是UB都呈現隨資源配比而增長的趨勢.
5 結論與下一步工作
本文針對互斥約束下的#WS問題,建立了一種基于模式回溯的定界算法.它具有O*(B|S|)時間復雜度和多項式空間復雜度.在資源配比相當高,而約束密度較低的隨機生成數據集上進行實驗,本文算法在時間性能上較現有三種精確計數算法有相當明顯的統計優勢,而空間占用也常常是最小的.同時,算法確定的上界與精確結果比較接近,為其提供了很好的快速估計.下一步將繼續優化本文算法的性能,提高其求解問題的規模.
猜你喜歡
江蘇安全生產(2023年1期)2023-02-08 05:58:38
資源節約與環保(2022年8期)2022-09-20 02:25:22
吉林廣播電視大學學報(2021年4期)2022-01-14 02:35:48
藝術品鑒(2020年7期)2020-09-11 08:04:44
作文成功之路·小學版(2020年5期)2020-06-11 12:48:26
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26
當代貴州(2018年28期)2018-09-19 06:39:04
資源再生(2017年3期)2017-06-01 12:20:59
決策(2015年9期)2015-09-10 07:22:44