數字全息測量超高速撞擊碎片云實驗研究
2020-12-07 06:08:20薛志亮朱有琦謝愛民吳迎春周永剛吳學成
宇航學報 2020年11期
關鍵詞:測量
薛志亮,朱有琦,謝愛民,吳迎春,周永剛,吳學成
(1.浙江大學能源清潔利用國家重點實驗室,杭州 310027;2.中國空氣動力研究與發展中心,綿陽 621000)
0 引 言
隨著人類開發太空步伐的加快,由于運載火箭末級、人造衛星和航天器失效或碰撞產生的空間碎片日益增多,已在地球周圍形成一個空間碎片包裹層。至今近地軌道以及地球同步軌道上彌漫的空間碎片總數已超過4千萬個,總質量達幾千噸[1-3]。空間碎片及微流星體與航天器的平均撞擊速度高達幾千米每秒,超高速撞擊會造成航天器表面的損傷和破壞,對在軌航天器的正常運行帶來很大的危害。對已經存在的較大空間碎片(直徑超過10 cm)一般采取監測、預警、躲避的規避措施,然而對數目巨大的較小空間碎片,不但在地面上難以跟蹤觀測,而且與航天器交會的次數多,較難采取規避措施,只能采用被動防護技術[4-5]。
被動防護技術是保護航天器免遭空間碎片破壞的有效手段,其中較著名的是1947年Whipple提出的“Whipple防護結構”,也稱雙層板防護結構,即在艙壁外間隔一定距離設計一層薄板防護屏,使空間碎片撞擊防護屏后破碎成擴散的碎片云,分散了空間碎片對艙壁的沖擊能量密度[6]。空間碎片撞擊薄板防護屏后形成的碎片云特性直接影響艙壁的撞擊損傷效果。基于超高速撞擊碎片云圖像研究碎片云的運動規律、結構特征和形成機理,可以為航天器的防護結構設計提供依據[7-8]。
目前碎片云圖像的實驗測量手段主要有多序列激光陰影成像技術[9-10],X射線照相技術[11-12],超高速相機捕捉技術[13],全息照相技術[14-15]等。謝愛民等[10]先后建立2序列、4序列和8序列激光陰影成像系統,獲取了超高速碰撞過程中彈丸的飛行姿態及碰撞所產生的碎片云特性。Piekutowski[11]、管公順[12]和朱玉榮等[16]利用X射線照相技術獲取了碎片云不同時刻的圖像,得到碎片云的發展形態、擴散速度和噴射角度等運動參數,并總結碎片尺寸、數目與撞擊速度的函數關系。Mihaly等[13]和王猛等[2]利用超高速相機捕捉彈丸撞擊靶板產生的碎片云分布影像,分析了碎片云在空間上的分布特征及其隨撞擊速度的變化,同時發現非球形彈丸撞擊時的姿態偏轉對碎片云分布形態有較大的影響。Nebolsine等[14]深入分析了全息技術測量超高速撞擊碎片云的系統要求,Werdiger等[15]利用離軸膠卷全息記錄了3.84 km/s運動碎片云的全息圖,Zhou等[17]首次采用同軸數字全息技術測量了超高速撞擊碎片云的三維結構,重建出部分碎片的清晰輪廓,并給出了碎片的等效粒徑。超高速撞擊碎片云的結構特征,尤其是碎片的粒徑分布和空間位置分布是防護屏設計的重要依據。柳森等[18]通過在靶板的側后方放置多塊石蠟板的方式回收撞擊后的碎片,進而統計碎片的大小和質量。何茂堅[4]通過人工查數的方法分析X光照片得到直徑大于1 mm碎片的尺寸,統計了碎片大小和數量隨撞擊參數的變化。
數字全息技術具有三維、非接觸測量碎片云顆粒場的能力[19-22],可以獲得碎片云的三維結構以及碎片的形狀、粒徑和空間位置分布,克服了陰影成像、X射線照相和超高速相機捕捉技術僅能獲得碎片云二維結構的局限性,在測量非球形彈丸和斜撞擊產生的非對稱碎片云結構方面具有突出的優勢。本文介紹了數字全息測量原理,在原有超高速碰撞設備的基礎上搭建納秒級脈沖激光數字全息系統,提出減弱超高速碰撞等離子體自發光、提高信噪比的方法,該技術已授權國家發明專利[23]。利用標定后的系統測量了2.25 mm鋁球彈丸以4.0 km/s的速度撞擊0.5 mm厚鋁板形成碎片云的全息圖,獲得了碎片云的三維結構、粒徑分布和碎片形狀。實驗數據為碎片云模型的建立和數值模擬模型的優化提供了參考。
1 測量原理
全息技術是一種基于光的衍射和干涉的波前重建技術,主要包括兩個步驟,全息圖記錄與數字重建。根據參考光與光軸有無傾斜角,可分為同軸全息和離軸全息。同軸全息光路系統簡單,被廣泛應用在流體力學、能源、環境等領域中顆粒物的三維測量[22]。圖1是平行光照射條件下,同軸全息記錄和重建過程的示意圖。平行光經過顆粒散射的光線作為物光波(顆粒散射光),沒有被顆粒散射的光作為參考光。物光波與參考光二者的光程不同,當相位差滿足一定條件時發生干涉,形成的干涉條紋被CCD記錄形成全息圖。以標量衍射理論為基礎,在計算機中模擬光的傳播,完成全息圖的數字重建,從而獲得顆粒的粒徑、形貌和三維位置等信息。全息圖的重建方法、顆粒識別及定位算法等更多詳細內容見文獻[22,24-26]。
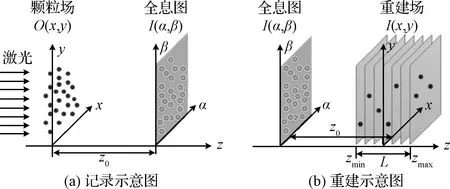
圖1 數字全息記錄和重建示意圖
2 實驗系統
實驗在中國空氣動力研究與發展中心超高速碰撞中心7.6 mm超高速碰撞靶上進行。實驗系統主要由超高速碰撞試驗裝置、數字全息測量系統和時序精確控制部分組成。
2.1 超高速撞擊試驗裝置
超高速碰撞試驗裝置如圖2所示,由口徑7.6 mm的兩級輕氣炮、測控系統和靶室組成。氣炮工作時先將輕氣室抽真空后填充輕氣(氫氣或氦氣),再將靶室抽真空,絕對壓力可低至10 Pa;然后點燃火藥,火藥燃燒膨脹產生高壓氣體推動活塞壓縮輕氣,使輕氣室內瞬間達到非常高的溫度和壓力;隨后膜片破裂,高溫高壓氣體驅動發射管內的彈托和彈丸沿發射管加速飛出;最后由于氣體阻力彈托和彈丸分離,彈托偏出彈道被攔截,彈丸繼續飛行撞擊靶板。彈丸經過光電探測器會擋光,使光電探測器發生響應,根據響應的時間間隔獲得彈丸的速度。
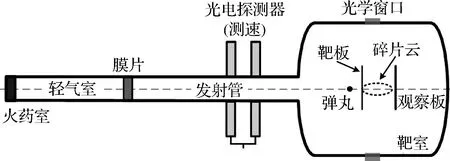
圖2 超高速碰撞試驗裝置
2.2 數字全息系統
數字全息光路系統示意圖和實驗現場圖如圖3所示,主要由激光器,擴束鏡,透鏡組,衰減片,532 nm濾波片及CCD相機組成。
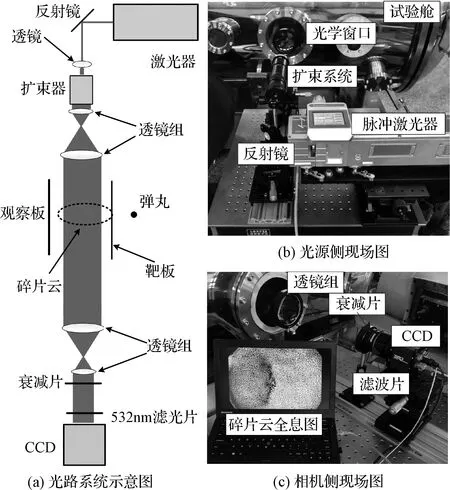
圖3 數字全息光路系統
超高速彈丸撞擊薄板產生碎片云的運動速度和彈丸速度接近,達到幾千米每秒。現有相機的曝光時間最短1 μs,假設碎片運動速度3 km/s,則曝光時間內碎片運動距離3 mm,產生明顯的拖影,不可避免的拖影相互重疊,造成顆粒識別困難和較大的粒徑測量誤差。實驗采用納秒級調Q脈沖激光作為光源,實現超高速運動碎片云的“凍結”,激光器型號Dawa-50,波長532 nm,脈寬8 ns。
超高速撞擊碎片云不僅有向前運動的軸向速度,還有一定的徑向速度,隨著撞擊時間的推移,碎片云逐漸散開,需要較大的視場才能完整地記錄碎片云的輪廓。實驗采用擴束器使光束直徑達到50 mm,進一步布置直徑為50 mm和100 mm的凸透鏡組,焦距分別為100 mm和200 mm(如圖3(b)所示),得到直徑90 mm的平行光束。光束穿過光學窗口照亮碎片云,隨后碎片云全息圖經過透鏡組縮小被CCD記錄。CCD相機型號GE4900,最短曝光時間625 μs,分辨率為4872×3248,像素尺寸7.4 μm。
超高速運動物體在撞擊過程中將自身擁有的巨大動能部分轉化為碰撞材料的內能,導致碰撞材料的溫度會急劇增加,被加熱的材料達到足夠的溫度使原子和分子輻射出可見光波長范圍內的光。實驗發現強烈的自發光會使相機過曝光,碎片的干涉條紋被“淹沒”[17]。記錄過程中相機的曝光時間長達625 μs,不可避免地會受到碎片云撞擊觀察板自發光的影響。鋁原子的輻射峰值出現在波長396.15 nm處[27-28],采用帶寬20 nm中心波長532 nm的帶通濾波片對自發光進行濾波,允許532 nm信號光通過,大部分的自發光被過濾(如圖3(c)所示)。進一步在相機前布置直徑50 mm,透過率1%的中性濾波片,由于全息圖信號光和自發光都被衰減了,通過提高激光能量,增強信號光,可以提高信噪比。
2.3 時序精確控制
超高速撞擊碎片云的運動速度非常快,從產生到撞擊觀察板整個過程僅有幾十微秒,為了準確記錄某運動狀態的碎片云全息圖,精確控制測量系統的時序。在彈托和彈丸分離后,彈丸經過兩個光電探測器,根據響應時間間隔計算出彈丸的運動速度,進一步得到彈丸撞擊靶板產生碎片云運動到視場中心的時間。測控系統將外觸發信號給數字延時發生器(型號DG645)。根據提前設定的時序,數字延時發生器給激光器點燈信號,接著給相機曝光信號,相機開始曝光,等碎片云運動到視場中心,激光器收到信號開始出光,相機記錄彈丸撞擊薄板形成碎片云的全息圖。雖然相機曝光時間625 μs,但激光照射時間僅有8 ns,可以認為相機有效的曝光時間為8 ns。
3 實驗結果及分析
利用已知直徑的標準絲對測量視場的放大倍率進行標定,獲得等效像素尺寸。采用納秒級脈沖激光數字全息系統,精確控制測量時序,得到2.25 mm鋁球彈丸以4.0 km/s速度撞擊0.5 mm鋁板15 μs后的碎片云全息圖,重建得到碎片云的三維結構、粒徑分布和碎片形狀特征。
3.1 實驗參數
超高速撞擊實驗彈丸為直徑2.25 mm的鋁球,撞擊速度4.0 km/s,靶板為厚度0.5 mm的鋁板(模擬防護罩),觀察板位于靶板后方120 mm,也為0.5 mm的鋁板。試驗前靶室抽真空,絕對壓力35 Pa。調整控制系統時序,撞擊前165 μs激光器點燈,10 μs相機開始曝光,撞擊后15 μs激光器出光,CCD相機記錄彈丸撞擊薄板15 μs后碎片云的全息圖。利用透鏡組,測量視場擴大到原來的1.82倍,等效像素尺寸13.45 μm,視場大小44 mm×66 mm,視場中心距離靶板60 mm。
3.2 測量視場標定
為了較完整地記錄碎片云的輪廓,在CCD前安裝透鏡組,以擴大測量視場。實驗前用鐵絲懸掛標準絲放置在碎片云產生的位置,記錄鐵絲和標準絲的全息圖,如圖4(a)所示,標準絲的直徑為120 μm。由于光路系統中存在多個光學器件(透鏡、光學窗口、濾波片等),不可避免地會產生明顯的背景噪聲,如圖4(b)所示,采用擦鏡紙和酒精多次清洗,仍然存在較明顯的干涉條紋。
為了減弱背景對測量的影響,同時便于觀察目標物體的全息圖,利用多張背景圖生成一張背景,采用去背景的方式得到目標物體的全息圖,如圖4(c)所示,可以看出去背景后鐵絲和標準絲的全息條紋圖更清晰,背景更均勻。采用數字全息方法對去背景的標準絲全息圖進行重建,景深擴展后如圖4(d)所示。鐵絲和標準絲的重建圖像都很清晰,甚至可以看到局部打結的細節。統計不同位置處標準絲占的像素點數,平均值為8.91個,則實測直徑為65.93 μm,得到測量視場的放大倍率為1.82倍,也就是說實際視場大小為CCD物理靶面大小的1.82倍。基于標定結果計算鐵絲的直徑為2.50 mm,說明搭建的數字全息系統能夠同時測量大碎片和小碎片,即使二者的距離較近,大、小碎片的尺寸和輪廓也能準確識別。
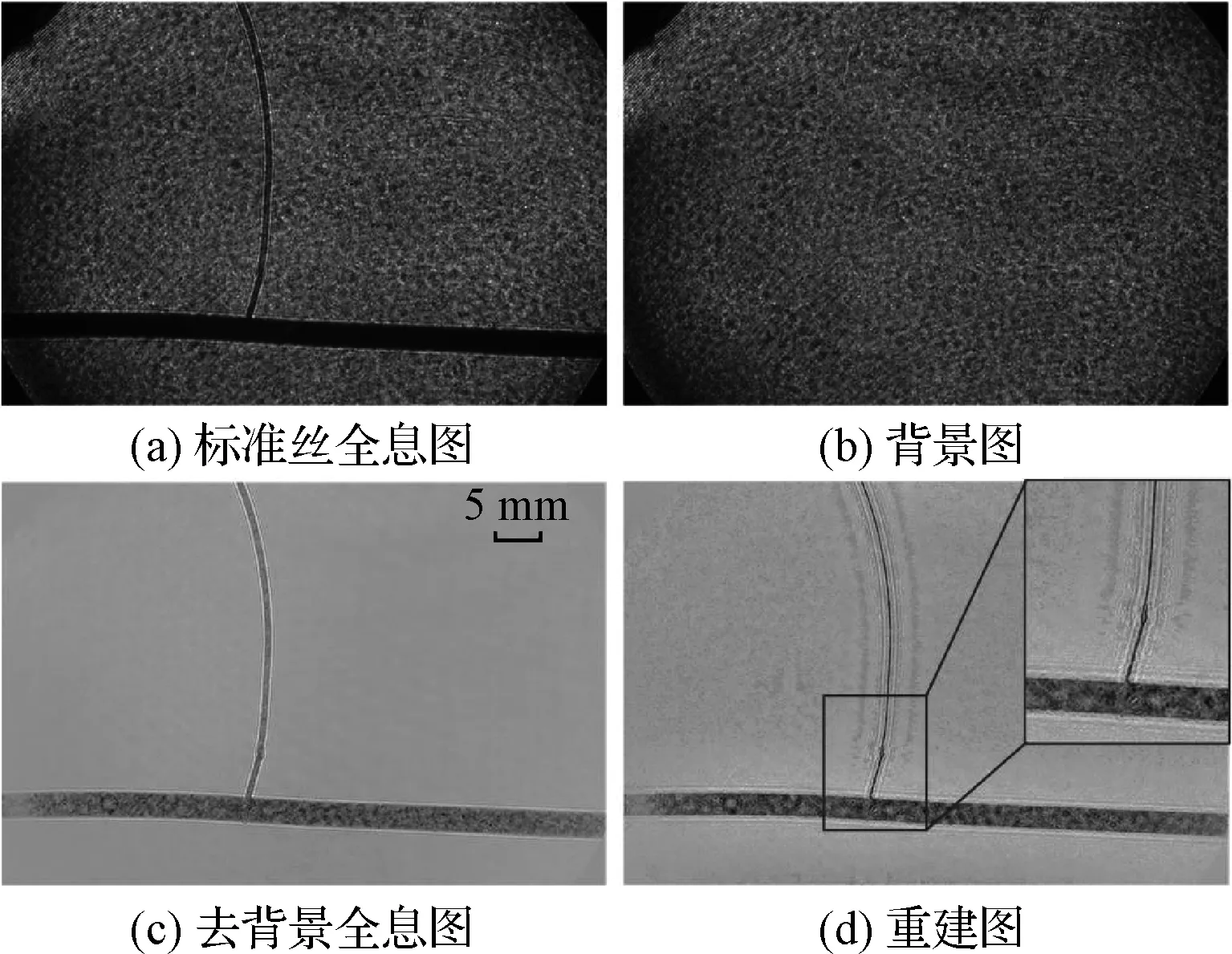
圖4 標定結果
3.3 實驗結果討論
超高速撞擊碎片云全息圖如圖5所示,該圖是去背景以后的碎片云全息圖,可以清楚地看到碎片云的輪廓以及碎片的干涉條紋。在碎片云的前端,有少量的小碎片,隨后碎片明顯稠密,干涉條紋互相疊加,可以判斷是由于彈丸的破碎形成的大量碎片,接著碎片的分布明顯稀疏,且存在一定的對稱性。
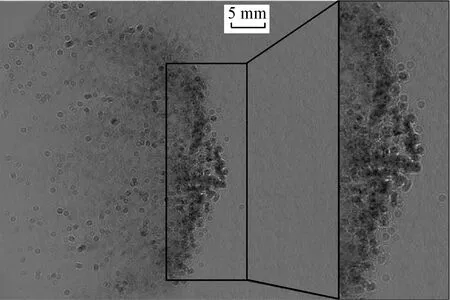
圖5 超高速撞擊碎片云全息圖
采用小波變換算法對去背景的碎片云全息圖進行重建,重建距離60 mm到140 mm,間隔0.1 mm,重建截面800個,景深擴展后的重建圖如圖6所示。碎片云的輪廓呈橢球型,可以分為三部分:碎片云的前端,主要由彈丸撞擊靶板后靶板的破裂形成,碎片較分散,粒徑在幾十微米到200 μm之間;碎片云的核心,主要由彈丸的破碎形成,碎片數量多,存在大碎片,且分布較集中;碎片云外殼,由彈丸后部(彈丸面向發射方向的部位)層裂構成,分布稀疏,擴散范圍廣。從圖6可以看出,大、小碎片的輪廓都很清楚,碎片形狀都不一樣,形狀不規則,多數呈長條形。
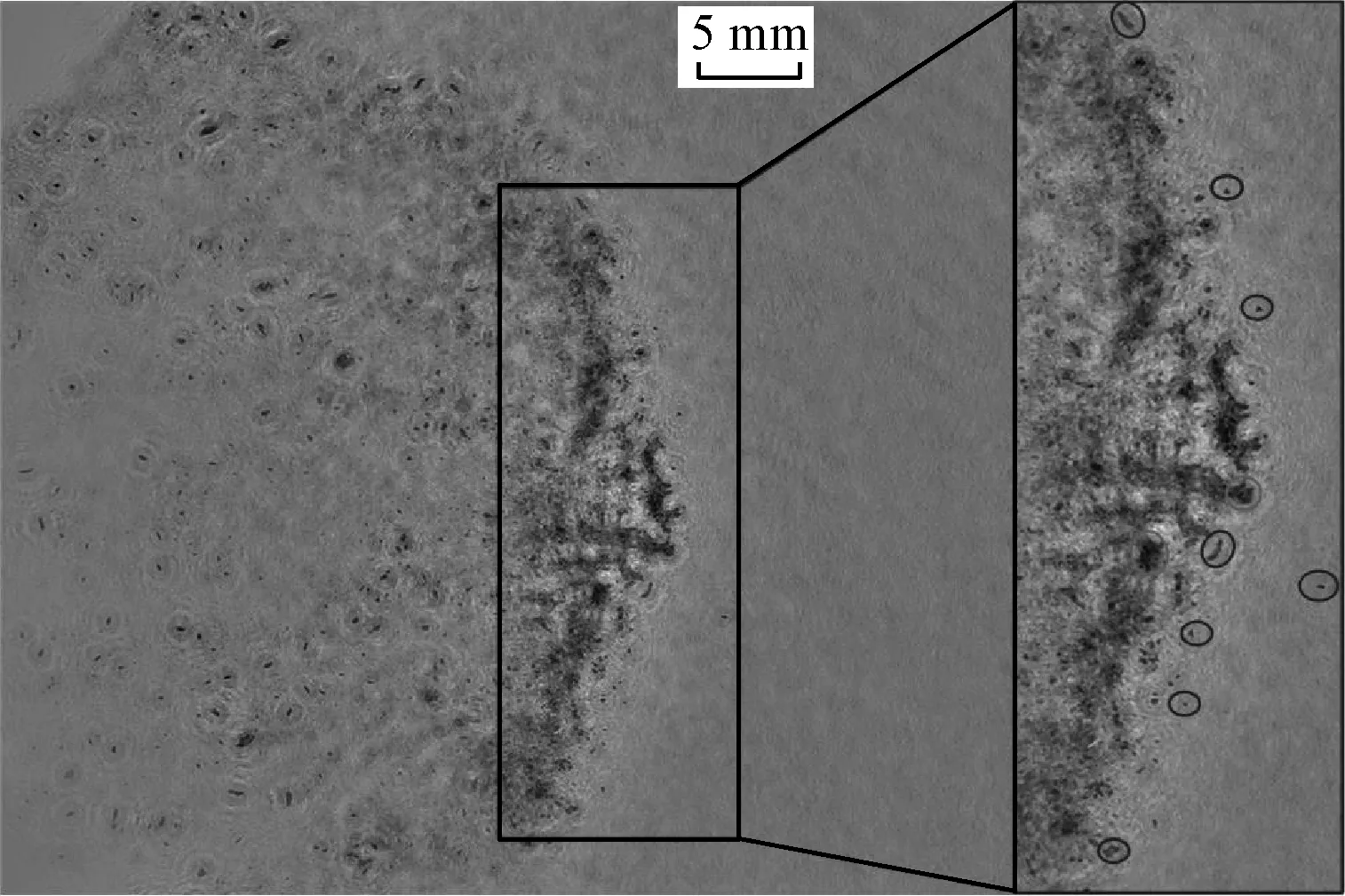
圖6 超高速撞擊碎片云全息圖重建景深擴展圖
進一步對重建碎片進行識別,一共識別出1080個碎片,根據碎片的聚焦曲線得到碎片的z軸坐標,從而獲得識別碎片的三維位置,如圖7所示,圖中球的大小和顏色表示碎片的等效粒徑。從圖7可以看出,大碎片出現在碎片云的核心(頭部),其前端均布有稀疏的小碎片,而300 μm~550 μm碎片分布在碎片云的外殼和前端,大量的小碎片分布碎片云頭部附近和外殼。參照碎片云在x-y平面上的投影,碎片云三維結構的前部呈“傘蓋形”,中間突出對應彈丸運動軸線,為彈丸和靶板最先接觸的位置。
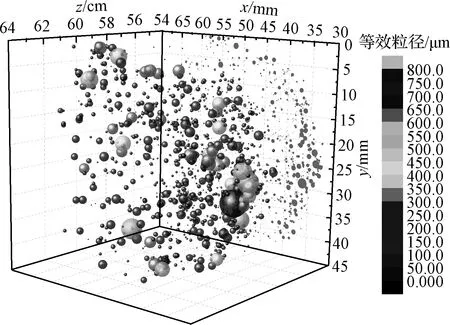
圖7 碎片云的三維結構
統計識別出的1080個重建碎片的粒徑分布,如圖8所示,粒徑范圍為34 μm~757 μm,平均粒徑109 μm,峰值粒徑75 μm,占比36.30%。碎片中小于100 μm的占比60.83%,100 μm~300 μm占比35.37%,大于300 μm的碎片僅占1.94%。同時,2.25 mm 彈丸以4.0 km/s的速度撞擊0.5 mm薄板產生的碎片云中大部分是小碎片,最大碎片僅有彈丸直徑的33.64%,說明薄板較好地分散了彈丸的動能,大大減輕了彈丸對后板的威脅。
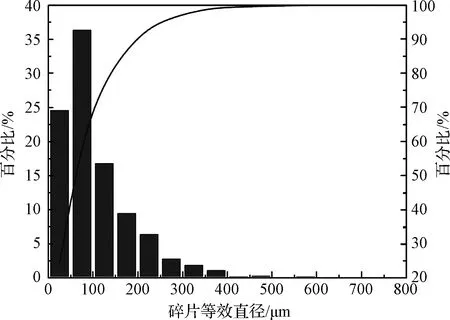
圖8 碎片云的粒徑分布
靶板后方觀察板的圖像如圖9所示,可以較明顯地分為兩個區域。在彈丸的軌道對應靶板中心附近彈坑數量多,穿孔嚴重,而在其外圍彈坑比較密集,多為小彈坑。對應碎片云的三維結構及粒徑分布,說明碎片云對后板的損傷嚴重區域主要是碎片云頭部彈丸破裂形成的大碎片造成。
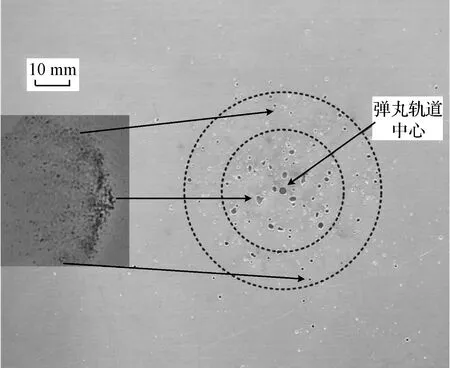
圖9 靶板后方觀察板圖像
4 結 論
在中國空氣動力研究與發展中心7.6 mm超高速碰撞靶上搭建納秒級脈沖激光數字全息系統。精確控制測量系統的時序,采用532 nm帶通濾波片和中性衰減片消除超高速碰撞自發光的影響,利用高分辨率相機記錄碎片云的全息圖,獲得了2.25 mm鋁球彈丸以4.0 km/s速度撞擊0.5 mm鋁板15 μs后的碎片云全息圖,測量視場達到44 mm×66 mm。通過小波變換對碎片云全息圖進行重建,得到超高速撞擊碎片云的三維結構,碎片的形狀及粒徑分布。大碎片分布在碎片云核心區,中等大小碎片分布在碎片云的外殼和前端,大量的小碎片分布在碎片云頭部附近和外殼。撞擊形成碎片云的等效粒徑范圍34 μm~757 μm,平均粒徑109 μm,峰值粒徑75 μm,占比36.30%。本文首次實驗測得了超高速撞擊碎片云較完整的三維結構,統計了碎片的粒徑分布,為數字全息技術在超高速碰撞領域的應用奠定了基礎。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00