不同重力環境下空間機構電機驅動力差異
2020-12-07 06:08:18劉福才曹志瓊
宇航學報 2020年11期
關鍵詞:環境
劉福才,曹志瓊,張 曉,李 倩
(燕山大學工業計算機控制工程河北省重點實驗室,秦皇島 066004)
0 引 言
對于在太空中運行的空間機構,重力釋放是其在空間復雜環境中遇到的問題之一[1]。空間機構通常在地面進行設計調試,在空間微重力環境中進行操控,由于重力環境的變化,空間機構的運行會受到一定的影響,嚴重時會發生故障[2-3]。因此,有必要研究重力變化對空間機構運動行為造成的影響,分析空間機構在不同重力環境下運動行為的差異性。以此作為依據,進行空間機構的優化和控制器設計,改善空間機構的在軌服役性能,提高空間機構的操作精度,避免因重力變化而引起的機構故障[4]。
國外關于重力對空間機構運動行為的研究,首先是在數值模擬仿真領域。研究者在計算機中建立各種不同的重力環境,運用結構力學、物體運動學及動力學等知識,對機構在不同重力環境中的各項參數特性進行了理論仿真研究,從理論上對空間機構在微重力環境中的重力效應問題做出了重要的貢獻[5-7]。在取得相關理論研究成果后,世界先進航天國家如德國、日本、美國,又通過落塔、飛機拋物線飛行、空間站在軌飛行等試驗方法,相繼獲得空間機構定位精度、電機驅動電流、摩擦參數等微重力環境下的試驗數據,并將其與地面試驗研究數據進行對比[8-12]。對比研究結果表明,地面模擬微重力環境中得到的試驗數據,與真實微重力環境中獲取的試驗數據存在著很大的差異。
我國在重力變化對空間機構運動行為的影響方面研究較晚,初期研究重點多在機構運動學的模型建立與分析、地面模擬微重力環境試驗以及試驗方法上[13]。由于空間試驗條件及技術水平的限制,關于不同重力條件下空間機構運動行為的差異性研究成果還比較少,目前的研究成果主要集中在多自由度微重力模擬試驗裝置、重力影響試驗補償研究、重力影響仿真分析和重力影響下的空間機構控制技術等方面[14-17]。王文魁教授在文獻[1]中提出了空間機構運動行為模擬概念,指出可以在地面重力場環境中,以試驗模擬手段找出重力對機構運動行為造成的影響,尤其是對機構間隙等其它一系列運動行為參數的影響。燕山大學劉福才教授對不同重力環境下機械臂驅動力進行了仿真模型及試驗研究,通過改變關節軸線取向的方法,對微重力環境進行了模擬,得到適用于不同重力環境下的關節摩擦模型[18-19]。在空間機構地面試驗中,研究者多采用關節軸線平行于地面重力方向進行的微重力環境模擬[20],并沒有進行真正的微重力環境試驗,關于空間機構電機驅動力在微重力環境與模擬微重力環境中的差異,還沒有相關結論。
本文為了對不同重力環境下空間機構電機驅動力進行分析,首先基于拉格朗日方程推導了單關節機械臂的動力學模型,再根據力矩平衡和直流電機原理,得到直流電機的電樞電流;通過在不同重力環境下分別改變摩擦、轉速、負載等條件進行仿真,分析地面與空間驅動力的差異及其影響因素;綜合考慮并設計一套基于單關節驅動的機械臂試驗裝置,并進行落塔微重力試驗,對比分析地面模擬微重力環境試驗和落塔微重力試驗的試驗數據,獲取相關結論;同時將試驗數據與仿真數據進行分析比較,并基于試驗獲取的數據對摩擦模型進行修正,辨識得到微重力條件下的摩擦系數。
1 模型建立
單關節機械臂是由直流減速電機通過輕桿(連桿質量遠遠小于負載質量,故忽略連桿質量)帶動負載進行旋轉運動的裝置。在笛卡爾坐標系(X,Y,Z)中,以輕桿連接電機的一端(軸心端)作為原點,分別建立坐標系(0)、坐標系(1)。其中坐標系(0)是笛卡爾坐標系(X,Y,Z)在XY平面上的一個平移,固定不動,其坐標原點為(0x0,0y0,0z0);坐標系(1)隨著輕桿的轉動相對于固定坐標系(0)繞0z軸旋轉(1z軸和0z軸重合),其坐標原點為(1x0,1y0,1z0),建立的坐標系如圖1所示。
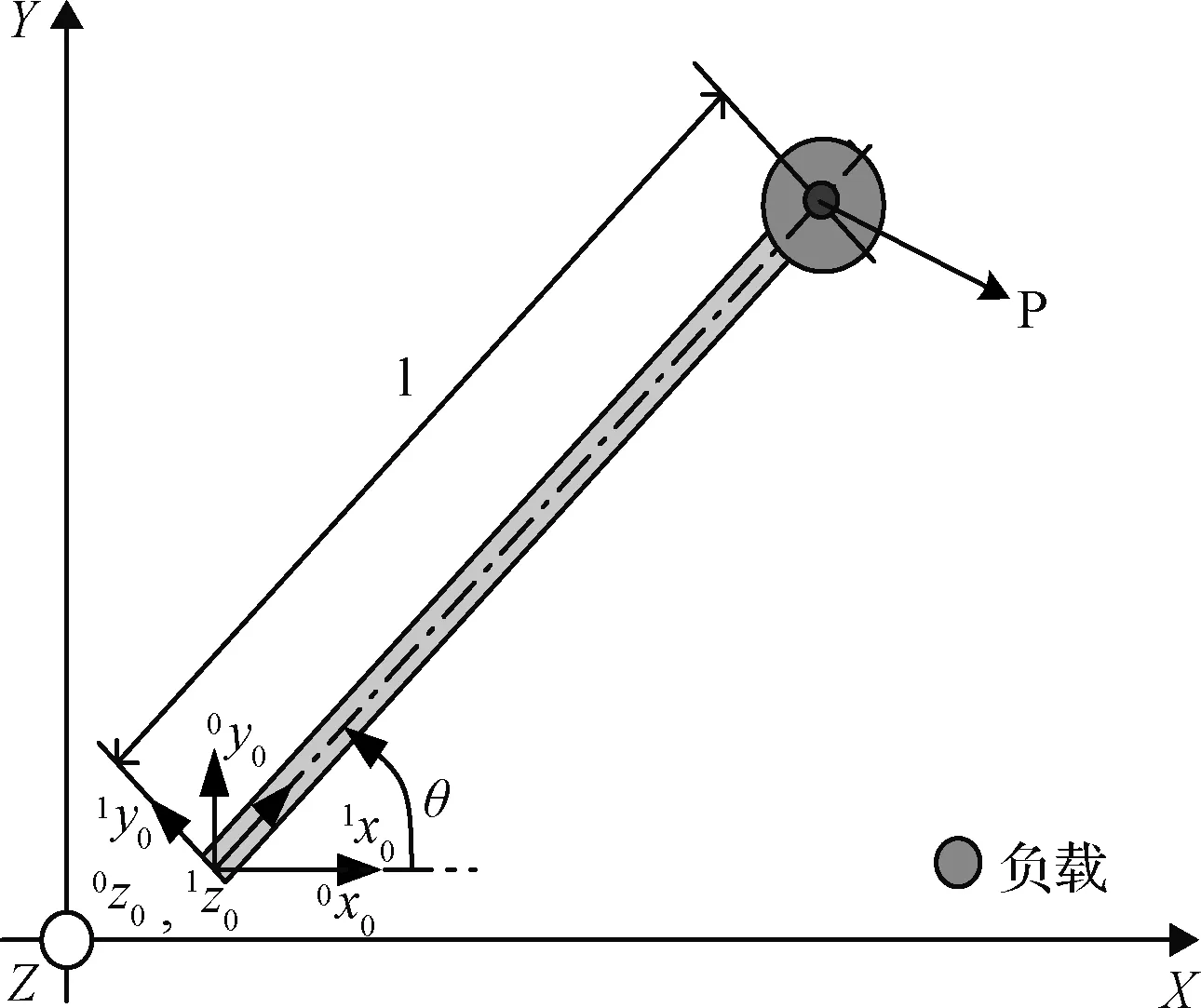
圖1 輕桿坐標系
為了對單關節機械臂的驅動力進行分析,采用拉格朗日方程對單關節機械臂建立動力學模型。該方法將系統看作一個整體,通過分析系統能量、系統變量及其微分之間的關系,將有關運動的描述轉化為能量的描述,避開了系統中力、速度、加速度等矢量以及矢量間的復雜運算,從而得到運動方程式。在廣義坐標系中,定義拉格朗日函數為:
L=T-U
(1)
式中:L是拉格朗日量,T和U分別為系統的動能和勢能。
對拉格朗日函數進行求導及變形,得到拉格朗日方程表示如下:
(2)
式中:q是機械臂關節變量組成的向量,ξ是廣義坐標q相關的廣義力。對于空間中的一點X,在上述坐標系(0)和坐標系(1)中分別表示為0X和1X,展開表示為:
(3)
又由圖1可知,負載重心點P在坐標系(1)中的坐標為(l,0,0)T,則點P在坐標系(1)中記為
(4)
坐標系(0)繞0z軸旋轉θ角后,與坐標系(1)重合,由此得到兩坐標系的變換矩陣0R1為:
(5)
由式(4)和式(5),得P點在坐標系(0)中的坐標0P為:
(6)
將式(6)對時間進行微分,得到速度v:
(7)
因為坐標系(1)繞0z軸旋轉θ角,故在0x軸、0y上的旋轉角度為0,坐標系(1)相對于坐標系(0)的旋轉角速度ω為:
(8)
根據速度v和角速度ω,得到拉格朗日方程中的系統動能T:
(9)
式中:m是負載質量,Iz是負載慣量。
將式(7)、式(8)代入式(9)中,計算得到系統動能T為:
(10)
在圖1的笛卡爾坐標系中,當輕桿與Y軸負半軸平行時,系統的勢能記為0,以X軸正半軸作為起始運動處,逆時針旋轉為運動正方向,計算系統的勢能U為:
U=(1+sinθ)mgl
(11)
根據式(10)和式(11),代入拉格朗日函數式(1)中求得(單關節機械臂:q=(0,0,θ)T:
(12)
由于系統受到重力和摩擦力的作用,故系統的合力FL為:
(13)

綜上,對拉格朗日方程中的各項分別進行運算,得到:
(14)
將式(13)帶入式(14)進一步整理得:
(15)
將上式表述為矩陣形式,得到動力學方程為:
(16)
又由于單關節機械臂的關節驅動使用行星直流減速電機,根據直流電機原理,電磁轉矩與電樞電流成正比,即電磁轉矩Te:
Te=Kt×i
(17)
式中:Kt為電磁轉矩常數,i為直流電機電樞電流。
在機械臂帶動負載進行運動時,電磁轉矩Te的一部分會因為轉動中的慣性和摩擦而損失,這部分損失記為Tf;電磁轉矩的另一部分則會傳遞到負載側用于帶動負載運動,記為Td。
根據力矩平衡原理,得到力矩平衡方程:
(18)
式中:J是轉動慣量(電機旋轉時的慣性),Bm是黏滯摩擦系數。
單關節機械臂的驅動電機為直流減速電機,存在減速機構,設定其減速比為N。又因為減速機構是通過多級齒輪來完成減速,齒輪間存在著滑動摩擦,電機輸出側轉矩Td經過減速機構時會因此損失一部分,該摩擦損失力矩與轉矩Td成比例。設定摩擦比例系數為c,則經過減速機構傳遞到負載側的扭矩τq為:
τq=N(Td-cTd)=N(1-c)Td
(19)
2 仿真分析
基于上述拉格朗日方程與直流電機原理推導出的單關節機械臂動力學方程,在Matlab軟件中建立仿真模型,根據試驗目的與試驗裝置的實際參數,設置方程中各參數如表1所示。同時,為了分析不同重力環境下有無摩擦、不同負載、不同轉速對直流電機驅動力的影響,分別設置不同的仿真條件如表2所示。
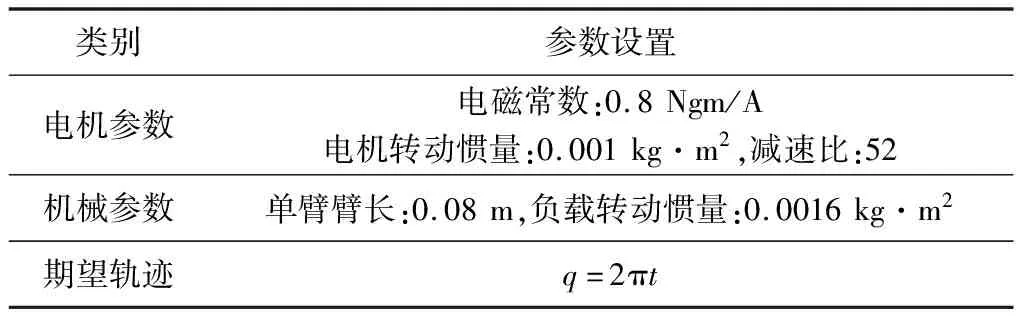
表1 仿真參數設置
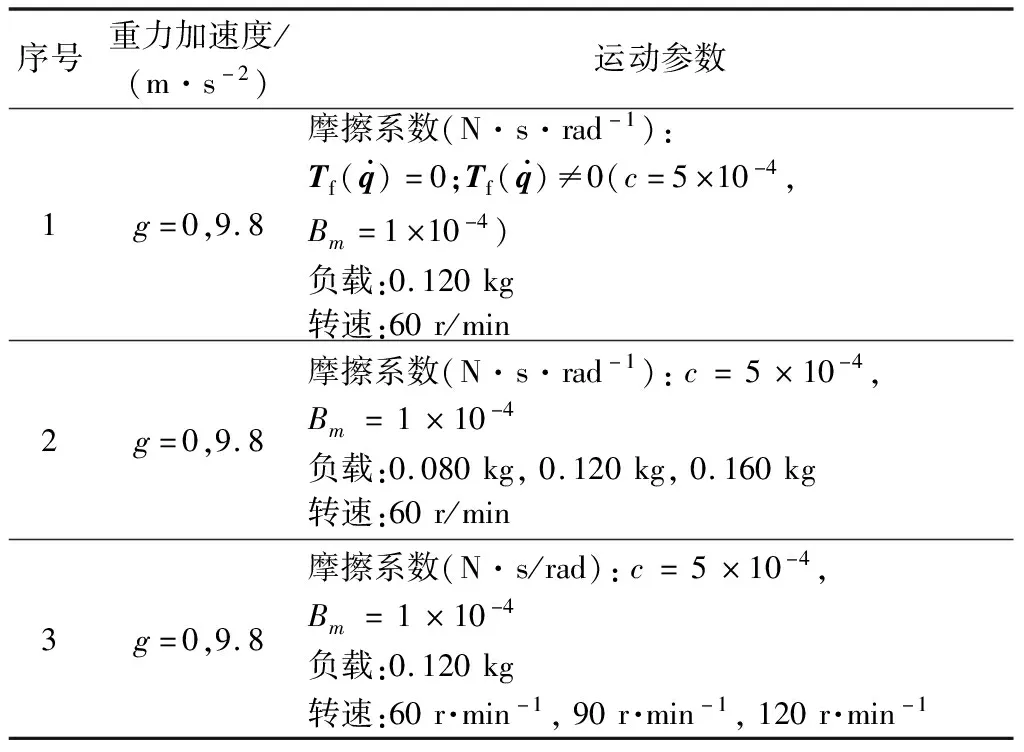
表2 仿真條件設置
2.1 不同重力環境下摩擦對電機驅動力矩的影響
根據表1中的條件1進行仿真,得到不同重力環境下摩擦對驅動電流影響曲線如圖2所示。
從圖2中可以看出,在不同重力環境下摩擦對關節驅動電流的影響是不同的。在地面重力環境中電機驅動電流曲線近似正/余弦波形,驅動電流的變化與機械臂運動時的位置存在一定比例的正/余關系;又由于摩擦的關系,有摩擦時的電機驅動電流要略大于無摩擦時的電機驅動電流,但摩擦對電機驅動力的影響很小,電機驅動力主要用于克服重力做功。在空間微重力環境中,當空間無摩擦時,電機驅動電流為零;當存在摩擦時,電機驅動電流為一恒值,分析可知此時的電機驅動力全部用于克服摩擦力做功。
由上述可知,在地面重力環境中摩擦相對于重力對電機驅動力的影響很小;但在空間微重力環境中,因為沒有重力的影響,摩擦對電機驅動力的影響很大,因此只考慮在空間微重力環境中不同摩擦對電機驅動力的影響。進一步采用表3中各組參數進行仿真,得到空間微重力環境中不同摩擦對驅動電流影響曲線如圖2(b)所示。從圖中可以看出,在空間微重力環境中,電機驅動力主要用于克服電機旋轉運動中的摩擦力,并且電機驅動電流與旋轉運動黏滯摩擦系數Bm呈線性關系,而減速機構的摩擦系數對電機驅動力影響不大。
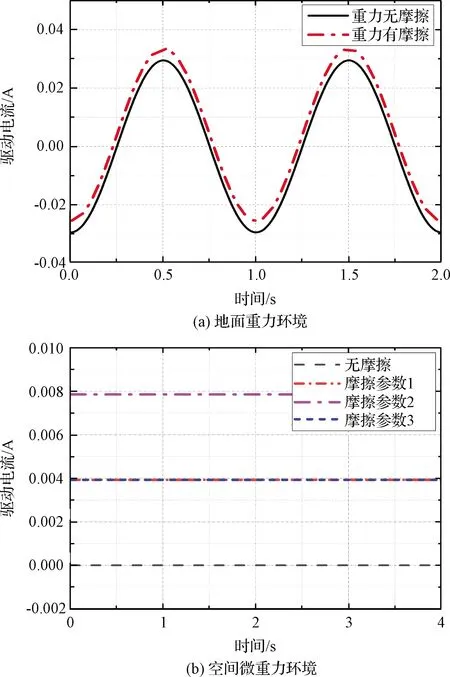
圖2 不同重力環境下有、無摩擦時電機驅動電流曲線
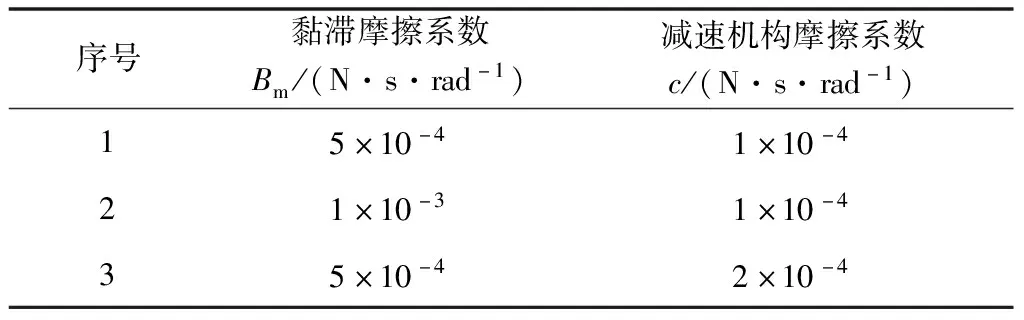
表3 不同摩擦參數仿真表
2.2 不同重力環境下負載對驅動力矩的影響
根據表1中的條件2進行仿真,得到不同重力環境下負載對驅動電流影響曲線如圖3所示。
從圖3可以看出,在不同重力環境下負載對關節驅動電流的影響是完全不同的。在地面重力環境中,隨著負載的增加,電機驅動電流也隨之增加,可知驅動電流與負載成正比關系,但在空間微重力環境中,驅動電流始終為一恒值,因空間微重力環境中的重力加速度g=0,不管負載質量如何變化,重力影響始終為零,機械臂只需要克服摩擦做功即可。
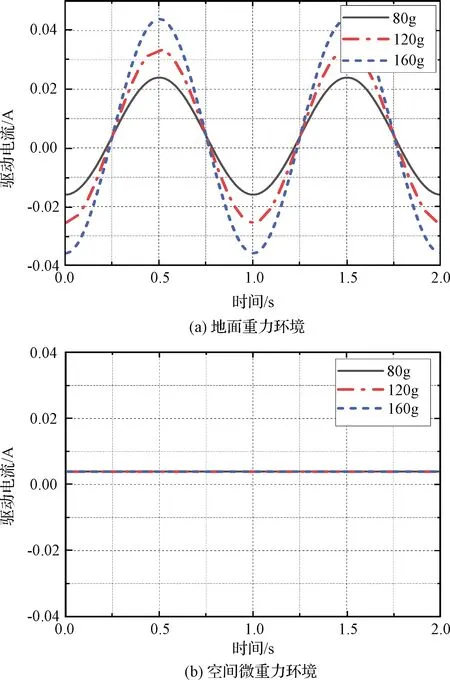
圖3 不同重力環境下不同負載時的電機驅動電流曲線
2.3 不同重力環境下轉速對驅動力矩的影響
根據表1中的條件3進行仿真,得到不同重力環境下轉速對驅動電流影響曲線如圖4所示。
從圖4中可以看出,在不同重力環境下,轉速的不同對關節驅動電流的影響極小。在地面重力環境中與空間微重力環境中,隨著轉速的增加,電機的驅動電流都會相應增大,但增加幅度不明顯。從機械臂動力學方程中分析可知,轉速的增加會導致方程中相關摩擦力的略微增大。總體而言,轉速對電機驅動電流的影響很小。
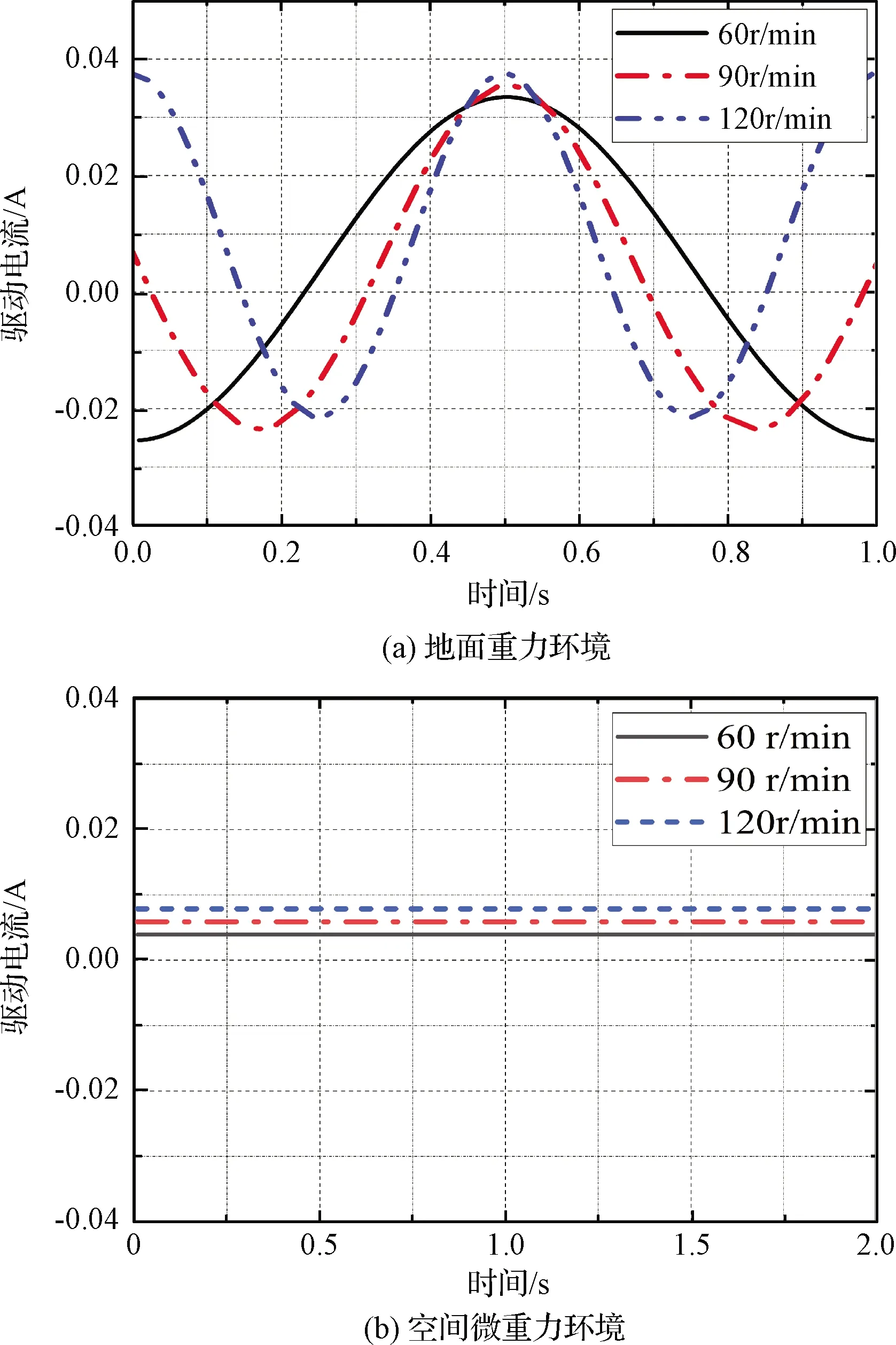
圖4 不同重力環境下不同轉速時的電機驅動電流曲線
3 地面試驗分析
3.1 試驗系統設計
單關節機械臂由直流電機作為關節驅動帶動單桿組成(單桿作為機械臂),單桿連接電機的一側作為軸心端,另一端為自由端,可以帶動負載進行運動。因單關節機械臂的驅動為直流電機,而電機轉矩是由電樞電流與磁場相互作用而產生的電磁力,通過電流與轉矩的數學關系,可以求出關節的驅動力,因此試驗采用對電機電流的直接測量來對驅動力進行分析,設計測控系統如圖5所示。
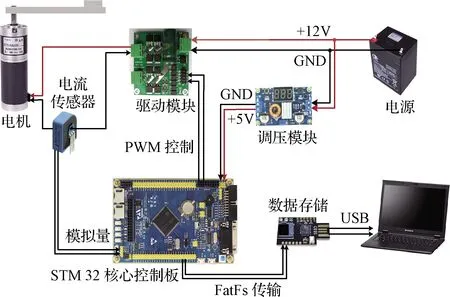
圖5 單關節機械臂測控系統組成
該測控系統采用STM32作為控制核心,通過向H橋電機驅動器輸出PWM波來控制直流電機的運行速度;在電機運行過程中由霍爾電流傳感器采集電機的驅動電流,并將采集到的原始數據傳送給控制單元,經過核心控制單元的模數轉換及相關數據處理后,利用FatFs文件管理系統將處理好的電流數據存儲到外設模塊TF卡中。TF卡中的電流數據可在試驗后進行讀取,便于進一步的處理與曲線繪制,從而對不同重力環境下單關節機械臂的驅動力進行分析,完成對仿真結果的驗證和參數辨識,機械臂相關硬件選型及其關鍵參數如表4所示。
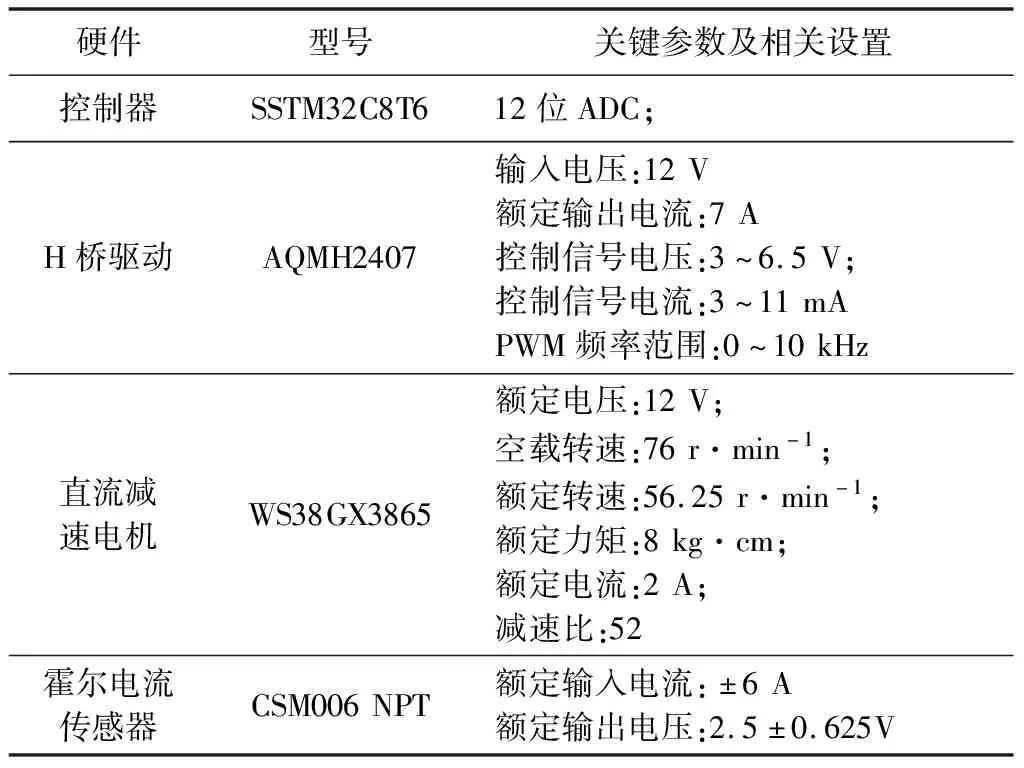
表4 測控系統硬件選型
在進行微重力試驗前,需要對測控系統進行地面試驗與調試。在機構驅動力的試驗研究中,通常將機構關節軸線垂直于地面來消除重力的影響,獲取模擬微重力試驗條件,進而研究機構在微重力環境下的某些特性[14,20]。在地面進行試驗時,首先采用關節軸線垂直于重力方向(平行于水平面),設置試驗條件,獲取地面重力環境下單關節機械臂電機驅動電流數據;再采用關節軸線平行于重力方向(垂直于水平面),獲取模擬微重力試驗條件下單關節機械臂電機驅動電流數據,并對數據進行分析,為后續落塔微重力試驗做準備。
3.2 不同重力環境對電機驅動力矩的影響
將試驗裝置的關節軸線分別平行和垂直于地面放置,設置臂桿末端負載為285 g,電機開環旋轉速度為85 r/min,測得的電機驅動電流響應曲線如圖6所示。
從圖6中可以看出,當試驗機構的關節軸線取向不同時,電機驅動電流差異很大。在重力環境中(關節軸線平行于地面),機構電機驅動電流峰值為166.89 mA,在模擬微重力試驗條件下(關節軸線垂直于地面),機構電機驅動電流峰值為142.15 mA;模擬微重力試驗條件下的電機驅動電流為重力環境中機構電機驅動電流的85%。
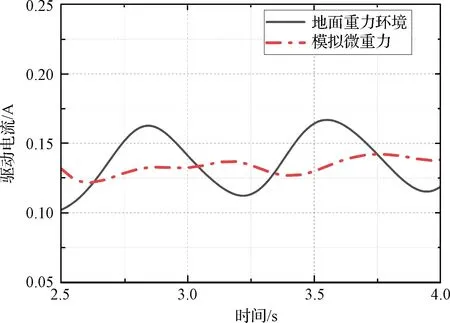
圖6 不同重力環境下電機驅動電流曲線
分析認為在重力環境中,電機在帶動負載運行時受到重力的影響較大,電機驅動力主要用來克服重力和部分摩擦力;而模擬微重力試驗條件中,機構受到重力的影響較小,驅動力矩主要用來克服摩擦力,由此導致模擬微重力試驗條件中的電機驅動電流遠小于在重力環境中的電機驅動電流。
4 落塔微重力試驗
4.1 試驗環境
為了進行地面模擬微重力與真實微重力環境下電機驅動電流的對比,將地面試驗用單關節機械臂進行落塔微重力試驗。國家微重力實驗室塔高116 m,地下深8 m,有效落高63 m,微重力水平10-3g~10-2g,最大可搭載載荷90 kg,可以獲得有效微重力的時間在3.5 s左右,滿足在不同重力環境下分析電機驅動力的試驗條件。
在落塔微重力試驗中,試驗裝置被密封放置在錐型的落艙中,艙內外通過無線電進行信息交互。在試驗艙內放置攝像機,記錄試驗過程中單關節機械臂的運動影像。試驗結束后打開艙體,取出試驗數據與視頻錄像。微重力試驗過程中單關節機械臂三個不同位置的運動圖像如圖7所示。

圖7 落塔試驗過程中運動圖像記錄
4.2 不同重力環境下電機驅動力分析
落塔微重力試驗是以自由釋放的方式進行,可能會對試驗裝置造成一定的損壞,因此設計同樣的單關節機械臂試驗裝置共4組,通過改變負載的試驗條件如表5所示,在轉速一定的條件下進行微重力試驗,并與上述地面模擬微重力試驗條件下的電機驅動電流相比較,獲取并分析機構在兩種重力環境中的電機驅動電流數據。圖8為落塔微重力試驗時的重力參數,圖9為試驗組2在落塔微重力試驗中的電機驅動電流曲線;圖10為試驗組2在模擬微重力試驗環境與落塔微重力試驗環境中的電機驅動電流數據對比曲線。
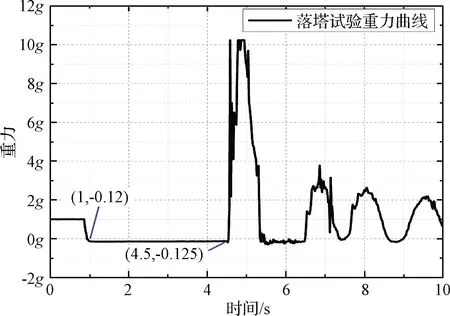
圖8 微重力試驗中的重力曲線
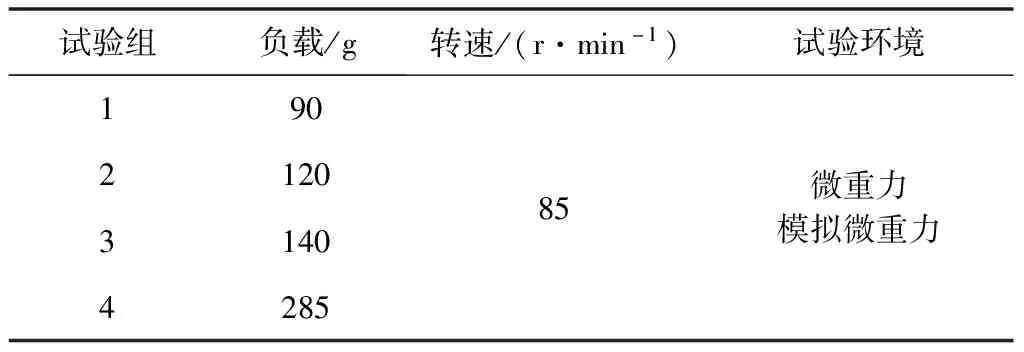
表5 試驗條件設置
從圖9中可以看出,在不同重力環境中運行的空間機構,其電機驅動電流存在著較大的差異。在未進入微重力環境中(試驗機構處在重力環境中),電機驅動電流較大且具有周期性;當進入微重力環境后,電機驅動電流變小、無周期性,數據曲線近似于一條直線,即在微重力環境中電機驅動電流為恒值;同時對比模擬微重力試驗環境中的電機驅動電流,從圖10可以看出落塔微重力與模擬微重力環境中的電流曲線較接近,并且模擬微重力試驗環境中的電機驅動電流略大于落塔微重力環境中的電機驅動電流。
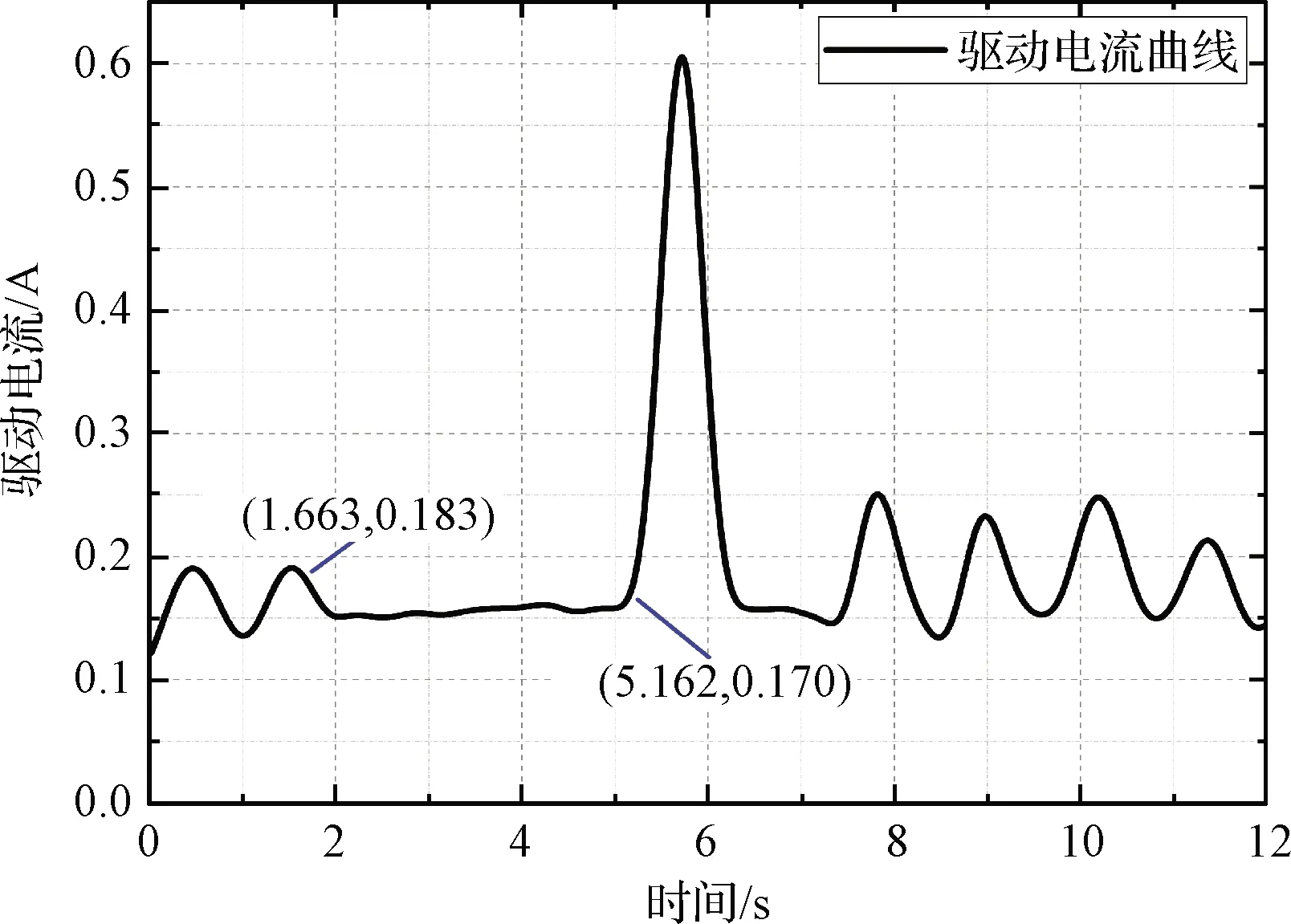
圖9 落塔微重力試驗中的電機驅動電流曲線
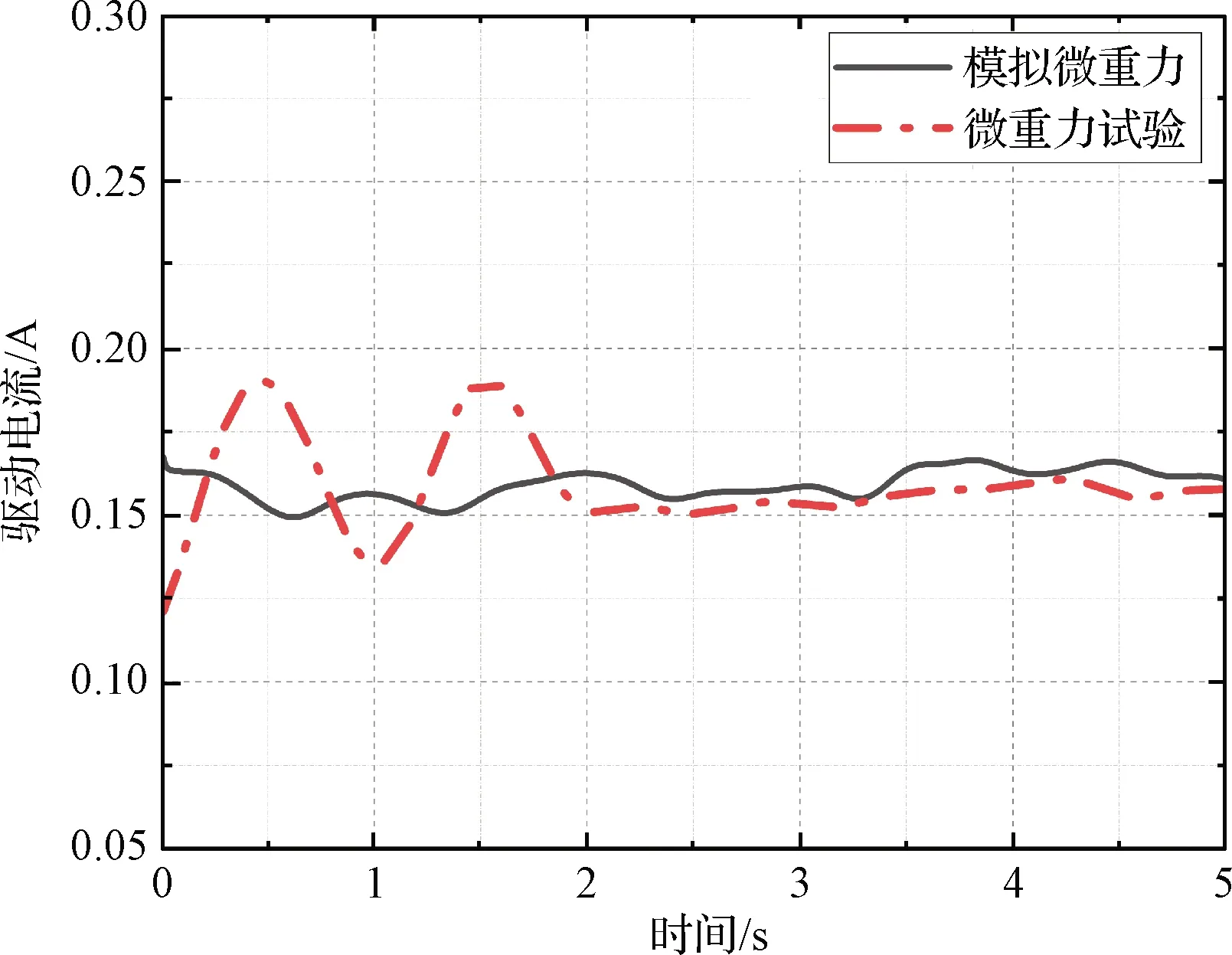
圖10 電機驅動電流數據對比曲線
設置負載120 g,轉速85 r/min的試驗條件,將重力環境、模擬微重力環境與落塔微重力環境試驗中獲取的驅動電流數據合并繪制如圖11所示。當機械臂處于重力環境中,電機驅動電流的峰值約為190 mA;當關節軸線平行于重力方向進行地面模擬微重力環境試驗時,獲得電機驅動電流為160.75 mA左右;當機械臂處于落塔微重力環境中,電機驅動電流在156.75 mA左右波動。可以看出,落塔微重力環境中的電機驅動電流與模擬微重力試驗環境中驅動電流相差很小,但與重力環境中的電機驅動電流有近18%的差值,驅動電流數值相差較大。
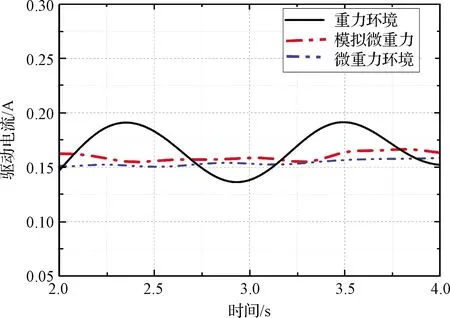
圖11 不同重力環境下的電機驅動電流
分析認為,在微重力環境中,由于機械臂不再受重力的影響,電機驅動力只需克服摩擦力矩做功。因此在微重力環境中,機構驅動力矩大小等于其所受到的摩擦力矩大小,其數值相對較小;而在重力環境中運行的機械臂,會受到重力和摩擦力的雙重影響,機械臂驅動力矩的大小為其受到的重力與摩擦力矩之和,其數值相對較大;在地面模擬微重力環境試驗中,由于機械臂的關節軸線平行于重力方向,相對于關節軸線垂直于重力方向、可以消除重力的對電機運動的影響,但是因為試驗是在地面重力環境中進行,總會受到重力的影響,進而機械臂的間隙和摩擦會發生變化,導致驅動力矩在不同位置有所不同。但是模擬微重力環境試驗與微重力環境中的驅動力差值約為3%,相對重力環境與微重力環境中驅動力差值的18%,還是比較小的。
因此,在一般探究微重力環境中空間機構運動行為分析的試驗中,可以通過將關節軸線平行于重力方向進行微重力環境的模擬。
4.3 基于試驗結果的摩擦參數辨識
在不同重力環境下設置負載120 g,轉速85 r/min的試驗,基于試驗得到的數據對電機摩擦參數進行辨識,辨識后的摩擦參數如表6所示。將辨識后的摩擦參數帶入方程對模型進行修正,再進行仿真并得到驅動電流數據,與試驗獲取到的驅動電流數據進行比較,繪制不同重力環境下參數辨識后的電機驅動電流曲線如圖12所示。
從圖12中可以看出,使用辨識后的摩擦參數仿真得到的電流數據曲線與試驗測得的電流曲線基本一致,驗證了摩擦參數辨識的正確性。另外,從表6辨識后的摩擦參數可以看出,在不同重力環境下電機旋轉黏滯摩擦系數相差不大,但減速機構摩擦系數變化較大,在重力環境與模擬微重力環境中分別為0.005 N·s·rad-1和0.003 N·s·rad-1,而在落塔微重力環境中僅為0.001 N·s·rad-1,可見在空間微重力環境中,由于減速機構的重力釋放,而導致機構摩擦系數減小。

表6 不同重力環境下的摩擦參數
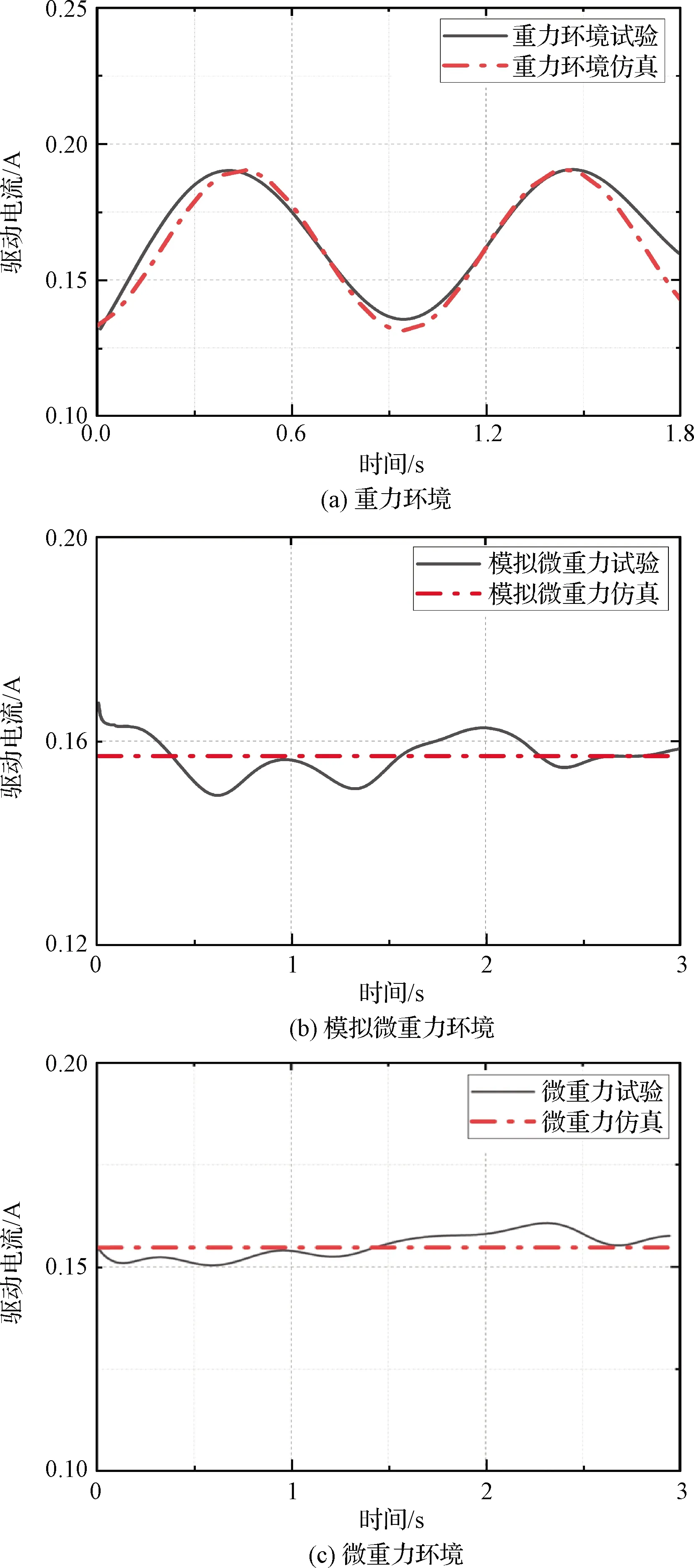
圖12 不同重力環境下參數辨識后電機驅動電流
5 結 論
對不同重力環境下空間機構驅動力的分析,首先通過仿真得出一般性結論,其次進行重力環境、模擬微重力環境及落塔微重力環境試驗驗證仿真結果,由試驗數據再對模型摩擦參數進行辨識,并得到修正后的機械臂動力學模型,所得結論如下:
1)在地面環境中,可以通過模擬微重力的方法來近似獲得空間微重力環境,即將機構的運動軸線平行于重力方向(垂直于水平面),消除重力對機構的影響,近似等效空間微重力環境,其與真正微重力環境中的驅動力矩相差在3%左右。
2)在不同重力環境下運動的空間機構,其驅動力大小存在著較大的差異。在微重力環境中運行的機構,其驅動力大小近似于恒值,且遠小于機構在重力環境中的驅動力,數據表明落塔微重力試驗中電機驅動力矩峰值與重力環境中電流峰值相差約18%。
3)在不同重力環境中,負載的變化對機構驅動力造成的影響也不同。在重力環境中,負載的變化會直接影響機構驅動力的變化,具體表現為機構驅動力會隨著負載的增大而增大;在微重力環境下,當機構的負載發生變化時,對機構驅動力影響極小。
4)在不同重力環境下,機構運行速度的不同對其驅動力的影響很小。在地面重力環境中,機構不同的運動速度,對機構驅動力大小的影響較小;在微重力環境中,機構運行速度的不同對其驅動力幾乎無影響。
5)在不同重力環境下,電機受到的摩擦力也不相同。在重力環境下,機構的電機驅動力主要用于克服重力做功,此時摩擦力對電機運行的影響很小,由試驗數據辨識得到電機黏滯摩擦系數為0.0201 N·s·rad-1,減速機構摩擦系數為0.005 N·s·rad-1;在微重力環境下,機構的電機運行不受到重力的影響,此時電機驅動力用于克服摩擦力做功,基于試驗數據辨識得到電機黏滯摩擦系數為0.0197 N·s·rad-1,減速機構摩擦系數為0.001 N·s·rad-1。可以看出,在不同重力環境下機構所受到的摩擦力并不相同,重力環境下機構受到的摩擦力要略大于微重力環境中機構所受到的摩擦力。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38