基于露天礦區智能駕駛場景的V2X通信技術研究及應用
2020-12-04 05:24:26蘇敏
數字通信世界 2020年11期
關鍵詞:信息
蘇 敏
(濰柴動力股份有限公司軟件研究院,山東 濰坊 261000)
0 引言
礦區場景具備封閉管理、路線固定、車輛行駛速度低、路況可控等特點,是智能駕駛最可能商業化落地的場景之一。礦區的環境與正常的路面環境存在很大差異,主要表現在車輛的行駛路線存在坡度,交叉路口存在感知盲區,作業面存在深度差異等。
與攝像頭或激光雷達相比,V2X擁有更廣的使用范圍,它具有突破視覺死角和跨越遮擋物的信息獲取能力,同時可以和其他車輛及設施共享實時駕駛狀態信息,還可以通過預判算法產生預測信息[1]。針對露天礦區場景特性,使用V2X技術協助礦車感知和規劃路徑。
1 V2 X技術研究及應用現狀
1.1 V2X通信協議研究現狀
車聯網標準體系主要包括無線和應用兩大部分,以底層的無線通信技術區分,目前主流的兩條技術路線是C-V2X (Cellular Vehicle-to-Everything)和DSRC(Dedicated Short Range Communication),上層的應用標準與部署地域耦合性較大,由各國家和地區根據區域應用特點進行制定[2]。DSRC是一種專用短距離的無線通信技術,不依賴于任何附加的基礎設施,從而最小化傳輸時延,但DSRC需要首先建立通信鏈路,造成較大的網絡開銷[3];LTE-V2X不需要建立通信鏈路,網絡開銷小且穩定性高,但是需要網絡中繼支持。基于兩種V2X通信方式各有利弊,在智能駕駛領域需要依據不同的應用場景和需求來選擇合理的V2X通信方式。
傳統的V2X通信主要以歐洲、美國以及日本推行的DSRC技術為主,該技術基于IEEE802.11協議擴充的IEEE802.11p協議,又稱車輛環境中的無線接入(Wireless Access in the Vehicular Environment,WAVE),主要應用于車輛之間的無線通信。我國重點支持具有自主知識產權的C-V2X技術研發與產業化,C-V2X是一種基于蜂窩網的V2X無線通信技術,除支持車與車、車與人、車與路側基礎設施通過直通方式進行通信外,也包含基于云平臺的LTE連接和信息服務,因此具備提供專用短程直接通信與廣域蜂窩通信的綜合通信能力。車與車、車與人、車與路側基礎設施短程直接通信,可以不需要LTE網絡支撐,提供主動安全等低時延要求的應用;車與云平臺則經由LTE網絡提供基于云端的更加豐富的綜合信息服務。
1.2 V2X技術應用現狀
我國以華為、大唐等通信公司為主導,提出對LTEV2X通信技術進行研究,與車企合作共同推出V2X解決方案,并在車路協同及自動駕駛領域進行了初步應用國際上各項V2X技術都尚未實現大規模商用,一方面受制于DSRC技術的局限性,另一方面則是由V2X特殊性決定的,車輛、道路及其他設施需要增加V2X通信功能的設備才能實現互聯互通。
隨著V2X核心芯片、模組和終端產品研發基本成熟,大唐、華為、高通等企業已對外提供基于LTE-V2X的商業芯片、模組。華為、大唐、中國移動可以提供基于LTE-V2X的車載單元、路側設備以及相應的軟件協議棧,相關終端產品已具備商用基礎。
目前針對礦區、農田等非道路場景的V2X應用處于初步階段,非道路場景沒有相應的標準及規范進行對V2X技術的約束,目前需要針對不同特定場景的不同特性,制定合適的V2X解決方案。
2 露天礦區智能駕駛場景環境特性
礦區主要分為兩大類:露天礦和地下礦,對于礦體所處的位置距離地面比較近時,選擇露天礦的形式進行開采能夠降低工作難度,提高開采效率,同時能夠增加安全系數。露天礦大多數采用凹陷式階梯狀分布,經過層層剝離,將礦體之上的非礦物資去除,從而實現底層礦體的開采。在礦區開采過程中,由上至下層層剝離上層浮土及巖石,并不斷擴展采礦范圍,同時在剝離過程中需要把剝離的廢土及巖石運送到已經完成采礦的排土區進行填充,這樣會造成在不同的深度都會有作業車輛進行作業。
2.1 礦區底層作業面網絡信號弱
在礦區中挖掘機從上至下進行浮土與巖石的剝離,寬體車采用無人駕駛車輛由下至上進行廢料的排卸,挖掘機與寬體車進行通信時處于會處于不同的水平面。由于露天礦區的地形會隨著開采的進行不斷地改變,會把基站設在固定的地表層,導致礦區底層作業面的信號較弱,從而影響通信質量。在處于不同深度的作業面的車輛進行相互通信時會造成信號嚴重的不匹配,尤其是處于低洼處的信號較弱無法傳輸信息至較高層的作業車輛。因此需要借助V2X技術進行輔助轉發。
2.2 作業路面交叉路口
由于露天礦區整體作業面呈階梯狀分布,各作業面交匯互相連通,在交匯處的路口與道路的路口完全不同。由于各個作業面不處于同一水平面,從而使不同作業面的車輛在作業面交匯處存在視覺盲區,單純的只依賴于車輛的雷達及攝像頭是不能安全的完成會車。因此需要依賴于網聯功能來協助感知。
2.3 基礎環境頻繁改變
礦區的無人駕駛車輛是由高精地圖調度平臺依據作業面情況及車輛位置進行車輛路徑規劃及調度,從而實現裝載車輛與挖掘機的高效匹配。由于礦區在開采過程中,會隨著開采任務的進行作業面實時發生變化。高精地圖是依賴于地圖數據的采集,而高精地圖的采集頻率是周期性采集不能達到實時的采集效果,因此需要依賴于作業現場的網聯終端進行輔助路徑規劃與調度。
3 露天礦區智能駕駛場景V2X技術應用
由本文的第2部分的描述可知:露天礦區存在低洼處信號覆蓋較差、作業面交叉口存在感知盲區以及作業面路況不斷改變的情況。針對露天礦區的特點設計了相對的V2X技術解決方案,露天礦區V2X技術應用基本框架如圖1所示。
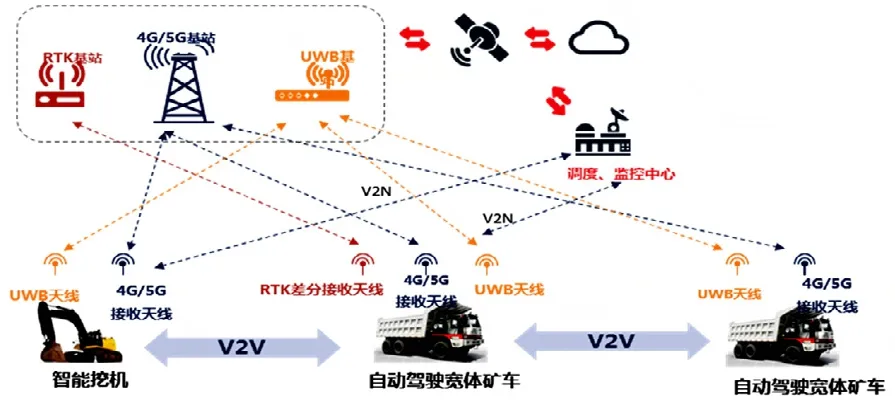
圖1 露天礦區V2X技術應用基本框架
3.1 協助轉發
挖掘機與無人駕駛排土車除了需要通過V2V的通信方式進行協助作業,同時挖掘機會將作業面情況、調度需求通過V2N的形式將數據轉發至云平臺調度中心。由露天礦區智能駕駛場景環境特性可知,處于深處作業面的挖掘機受基站影響導致信號較弱不能通過蜂窩網絡進行數據傳輸。在此情況下,需要借助V2V的直通方式將信息轉發至信號良好的車輛,信號良好的車輛將接收到的信息通過V2N的形式轉發至云平臺。實現信息轉發需要修改原有的廣播的數據格式,在原始的DSM廣播信息格式[4]中加入轉發標志位,接收到廣播信息的車輛根據判斷標志位來判斷是否需要轉發至云平臺。信息格式示意圖如圖2所示。

圖2 信息廣播數據格式
3.2 協助感知
在礦區作業面交匯口存在感知盲區,通過V2V直通方式廣播到周圍車輛,從而實現協助感知功能。
車載V2X終端能夠與周圍不同V2X終端交換車輛安全狀態數據,通過廣播將自身所在車輛的實時狀態包括車輛ID,車輛尺寸、車輛類別、位置信息、方向、車速、加速度、轉向角速度、剎車狀態信息告知周圍車輛。車輛根據接收到的廣播信息結合車端感知信息進行信息融合,從而作出正確決策。
3.3 輔助路徑規劃及調度
礦區作業面會隨著開采作業的進行不斷改變,云平臺的高精地圖更新頻率大于作業面變化頻率。云平臺根據高精地圖對自動駕駛寬體車進行全局路徑規劃,如果高精地圖沒有及時更新作業面的變化可能會導致錯誤的全局路徑規劃。所以,需要借助V2X網聯設備將整車上的高清圖片信息及作業面情況上傳至云平臺,云平臺根據V2X設備上傳的信息進行綜合評估,優化全局路徑;另外,也可以將最新的作業面信息廣播至附近車輛協助車輛進行局部的路徑規劃。
4 結束語
V2X技術對露天礦區智能網聯的應用起著至關重要的作用。V2X技術不僅能夠實現車輛與車輛、車輛與路側設備以及車輛與云端通信的功能,還能擴展車輛對環境的感知范圍,能協助動態變化的場景進行路徑規劃的功能。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
