基于凸輪曲線理論的機(jī)械手對(duì)ROV本體位姿影響效果分析
2020-12-01 05:40:34楊明巖張麗巍
機(jī)械設(shè)計(jì)與制造工程 2020年11期
王 妍,楊明巖,張麗巍,高 勝
(東北石油大學(xué)機(jī)械科學(xué)與工程學(xué)院,黑龍江 大慶 163318)
UVMS(underwater vehicle-manipulator system)即ROV(remote operated vehicle)機(jī)械手系統(tǒng)可代替人工進(jìn)行水下作業(yè),完成海底樣品采集、打撈、設(shè)備定位等任務(wù)[1]。UVMS本身是一個(gè)動(dòng)力耦合系統(tǒng),在進(jìn)行作業(yè)時(shí)因與作業(yè)目標(biāo)之間的動(dòng)力學(xué)耦合作用會(huì)造成作業(yè)目標(biāo)的運(yùn)動(dòng)誤差。目前對(duì)于此類誤差的補(bǔ)償大多是通過控制ROV的運(yùn)動(dòng)來實(shí)現(xiàn),然而對(duì)于細(xì)微誤差應(yīng)用此方法則很難滿足精度要求。這是因?yàn)椋m然通過控制機(jī)械手的運(yùn)動(dòng)可以彌補(bǔ)運(yùn)動(dòng)中產(chǎn)生的微小誤差,但機(jī)械手運(yùn)動(dòng)對(duì)ROV位姿的影響反過來又會(huì)影響到機(jī)械手末端位置,繼而影響補(bǔ)償效果,因此合理的機(jī)械手運(yùn)動(dòng)方式對(duì)誤差的補(bǔ)償效果至關(guān)重要。
基于此,本文采用機(jī)構(gòu)學(xué)凸輪曲線理論[2],推導(dǎo)出等加速度型、5次多項(xiàng)式型、變形梯形、擺線型、合成正弦和變形正弦運(yùn)動(dòng)曲線方程,假定作業(yè)目標(biāo)質(zhì)量忽略不計(jì),研究分析機(jī)械手以這6種運(yùn)動(dòng)曲線執(zhí)行相同動(dòng)作對(duì)ROV本體位姿產(chǎn)生的影響,間接評(píng)價(jià)機(jī)械手補(bǔ)償誤差的效果,研究成果對(duì)利用機(jī)械手運(yùn)動(dòng)補(bǔ)償作業(yè)誤差具有一定的參考價(jià)值。
1 UVMS動(dòng)力學(xué)模型建立
在描述UVMS運(yùn)動(dòng)之前,首先參考文獻(xiàn)[3]的方法建立UVMS的坐標(biāo)系,并將其分為固定坐標(biāo)系與運(yùn)動(dòng)坐標(biāo)系。這里以ROV和四自由度機(jī)械手構(gòu)成的UVMS為研究對(duì)象,建立的UVMS坐標(biāo)系如圖1所示。
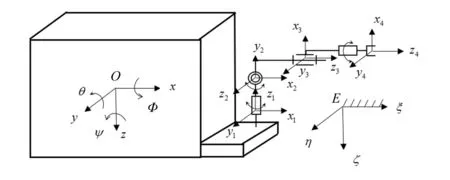
圖1 UVMS坐標(biāo)系
固定坐標(biāo)系E-ξηζ:選定海中任一點(diǎn)為坐標(biāo)系原點(diǎn)E,Eξ軸在水平面內(nèi),并以ROV的艏部為其正方向,Eζ軸與Eξ垂直且正方向指向地心,Eη軸與ξζ平面垂直,并以ROV右舷為其正方向[4]。
運(yùn)動(dòng)坐標(biāo)系O-xyz:ROV在水中存在靜平衡問題,先對(duì)ROV本體進(jìn)行配重,使ROV重心和浮心重疊在ROV幾何中心上,至少使ROV重心和浮心重疊保持在其橫、縱中剖面的交線上。將ROV的浮心規(guī)定為運(yùn)動(dòng)坐標(biāo)系的原點(diǎn)O,規(guī)定Ox軸正方向指向ROV的艏部,ROV的右舷方向?yàn)镺y軸的正方向,Oz軸垂直于Ox軸和Oy構(gòu)成的平面,其正方向指向地心。
文中部分變量的含義見表1和表2。表中將固定坐標(biāo)系簡稱為定系,將運(yùn)動(dòng)坐標(biāo)系簡稱為動(dòng)系。
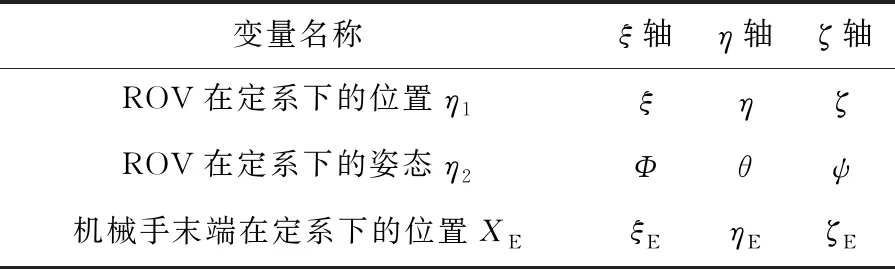
表1 固定坐標(biāo)系變量
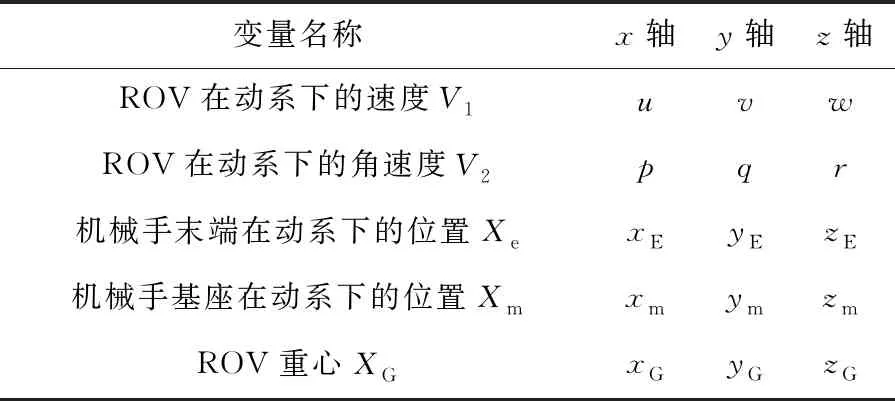
表2 動(dòng)坐標(biāo)系變量

基于準(zhǔn)拉格朗日公式(Quasi-Lagrange)及其他相關(guān)研究[5-6],UVMS的一般動(dòng)力學(xué)方程為:

(1)

ROV和機(jī)械手構(gòu)成動(dòng)力學(xué)耦合系統(tǒng),機(jī)械手運(yùn)動(dòng)時(shí)產(chǎn)生的交互作用力會(huì)引起ROV的位姿變化,而ROV位姿的變化又會(huì)對(duì)機(jī)械手的作業(yè)精度產(chǎn)生影響,要想保證機(jī)械手誤差補(bǔ)償?shù)男Ч鸵芯繖C(jī)械手運(yùn)動(dòng)對(duì)ROV位姿產(chǎn)生的影響。目前研究此類問題時(shí)機(jī)械手多采用等加速型的運(yùn)動(dòng)方式,但無法判斷機(jī)械手采取的這種運(yùn)動(dòng)方式是否合理。本文借助機(jī)構(gòu)學(xué)中的凸輪曲線理論,推導(dǎo)出多種運(yùn)動(dòng)曲線方程,并將其應(yīng)用在UVMS的動(dòng)力學(xué)分析上,找出最適合應(yīng)用于機(jī)械手控制的加速度曲線。
2 凸輪曲線描述與推導(dǎo)
慣性負(fù)載由靜止移動(dòng)到另一點(diǎn)剛好處于靜止?fàn)顟B(tài),在此過程中運(yùn)動(dòng)隨時(shí)間變化規(guī)律通常用機(jī)構(gòu)學(xué)中的凸輪曲線理論來研究。理想的運(yùn)動(dòng)軌跡是平滑的,即從始點(diǎn)到終點(diǎn)整個(gè)運(yùn)動(dòng)過程中有連續(xù)的位移、速度、加速度,起始點(diǎn)和終點(diǎn)的連續(xù)條件為:


式中:t為運(yùn)動(dòng)時(shí)間;tf為運(yùn)動(dòng)到終點(diǎn)所需時(shí)間;x為位移;xf為運(yùn)動(dòng)到終點(diǎn)的位移。
在慣性負(fù)載運(yùn)動(dòng)過程中,其加速度應(yīng)盡量小一些,且在運(yùn)動(dòng)過程中應(yīng)合理地分配加速度,這樣會(huì)產(chǎn)生較小的慣性載荷,使系統(tǒng)運(yùn)動(dòng)更加平穩(wěn)。
設(shè)定時(shí)間和位移的變化為
t/tf=T,x/xf=X
(2)
將x(t)統(tǒng)一為X(T),再設(shè)定dx/dT=V,d2x/dT2=A,則有
(3)
以下按無量綱形式對(duì)幾種典型凸輪曲線進(jìn)行描述和推導(dǎo)。
1)等加速度型。
等加速度型運(yùn)動(dòng)加速度Am為常數(shù),其表達(dá)式為
(4)
對(duì)式(4)積分,代入邊界條件V(0)=V(1)=0,得慣性負(fù)載的速度表達(dá)式為:
(5)
對(duì)式(5)積分,代入邊界條件X(0)=0和X(1)=1,得慣性負(fù)載位移表達(dá)式為:
(6)
其中Am=4。
2)擺線型。
擺線型角加速度的曲線為正弦曲線,Am為加速度最大值,加速度表達(dá)式為:
A=Amsin(2πT) 0≤T≤1
(7)
對(duì)式(7)進(jìn)行積分,由其邊界條件V(0)=0或V(1)=0,可得慣性負(fù)載速度表達(dá)式為:
(8)
對(duì)式(8)進(jìn)行積分,代入邊界條件X(0)=0和X(1)=1,得慣性負(fù)載位移表達(dá)式為
(9)
其中Am=2π。
3)5次多項(xiàng)式型。
5次多項(xiàng)式型角加速度曲線為3次多項(xiàng)式,其表達(dá)式為:
A=aT3-bT2+cT0≤T≤1
(10)
對(duì)式(10)進(jìn)行連續(xù)兩次積分有:
(11)
式中:a,b,c,d,e為多項(xiàng)式系數(shù)。
其邊界條件為A(1)=0,V(0)=V(1)=0,X(0)=0且X(1)=1,可得到d=e=0,同時(shí)有:
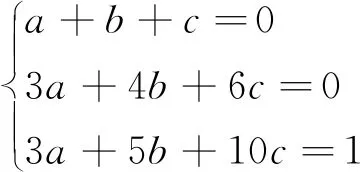
計(jì)算可得a=120,b=-180,c=60。則5次多項(xiàng)式運(yùn)動(dòng)規(guī)律可定義為
(12)
4)合成正弦。
合成正弦方式的加速度曲線為兩個(gè)不同運(yùn)動(dòng)周期的正弦曲線疊加,其加速度表達(dá)式為:
A=A1+A2=asin(2πT)+bsin(6πT)
0≤T≤1
(13)
對(duì)式(13)連續(xù)兩次積分有
(14)
利用邊界條件X(0)=0和X(1)=1,可直接得到c=1和d=0。速度邊界條件為V(0)=0或V(1)=0,則有:
(15)
如圖2所示,從削波角度分析,兩條獨(dú)立正弦曲線A1和A2需滿足:
(16)
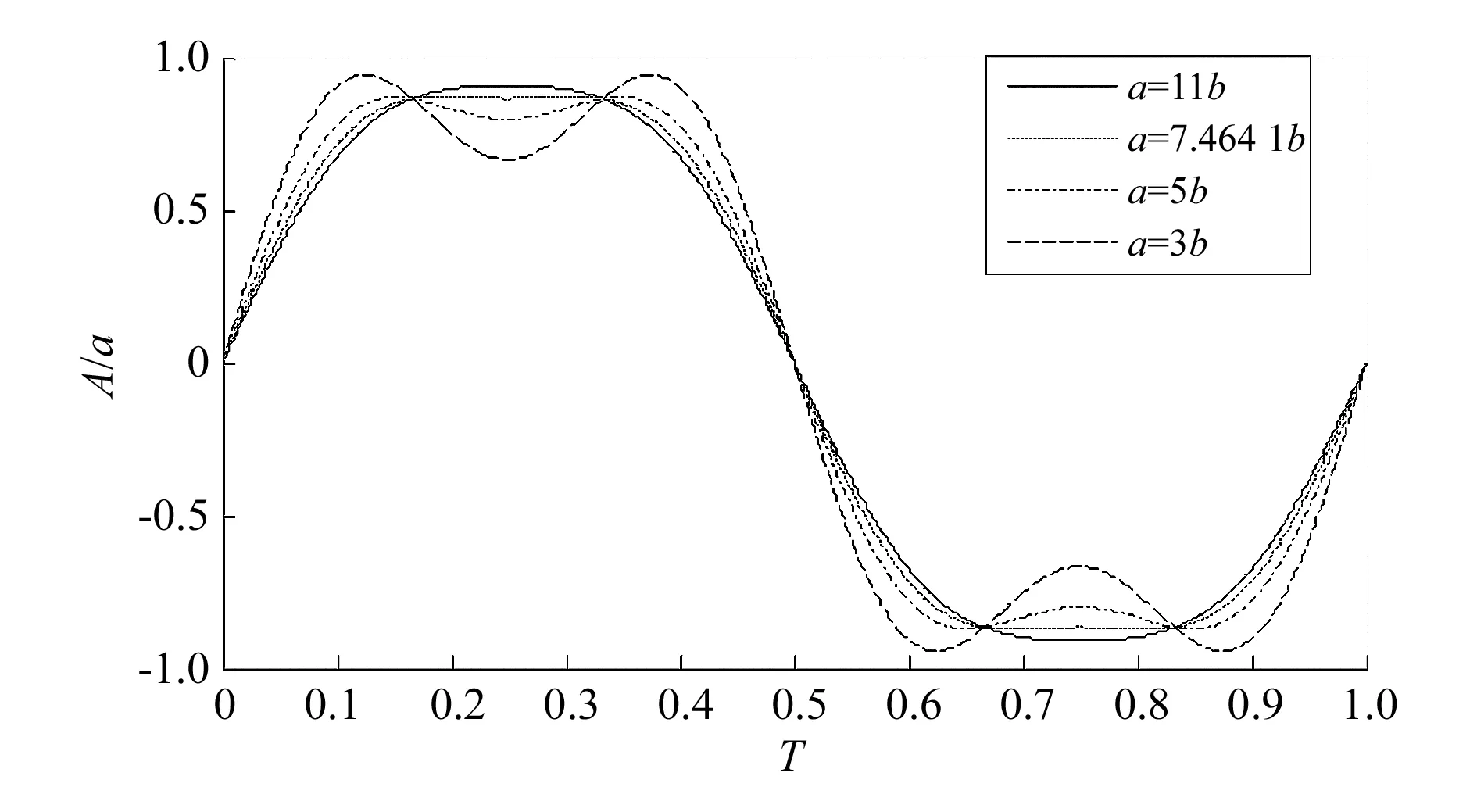
圖2 合成正弦參數(shù)的選擇
由圖可知,當(dāng)a/b減小時(shí),削波趨勢(shì)加強(qiáng),但在t=0~0.2這段時(shí)間加速度曲線變陡。取a=5b,可得合成正弦運(yùn)動(dòng)表達(dá)式為
(17)
5)變形正弦。
變形正弦由兩條不同角頻率的正弦曲線合成,其加速度表達(dá)式為:
(18)
對(duì)式(18)進(jìn)行積分,通過其相應(yīng)邊界條件限定,得到速度和位移表達(dá)式分別為:
(19)
(20)
6)變形梯形。
變形梯形由正弦曲線與直線合成,加速度表達(dá)式為:
(21)
對(duì)式(21)進(jìn)行積分,通過其相應(yīng)邊界條件限定,得到速度和位移表達(dá)式分別為:
(22)
(23)

3 多種類型凸輪曲線對(duì)比分析
圖3給出了上述6種運(yùn)動(dòng)規(guī)律的加速度、速度、位移曲線。從圖中可以看出,6種運(yùn)動(dòng)方式凸輪曲線在T=1以內(nèi)滿足位移X=1且起始速度V(0)和終點(diǎn)速度V(1)均為0的運(yùn)動(dòng)控制要求。同時(shí)可以看出位移曲線變化趨勢(shì)較相似,速度與加速度曲線變化存在較大差異。6種運(yùn)動(dòng)方式只有等加速型的加速度曲線不連續(xù),擺線類型具有最大加速度6.283 2,而等加速型的加速度最小為4。速度曲線中,變形正弦運(yùn)動(dòng)方式下具有最小速度峰值1.759 6,5次多項(xiàng)式為1.875 0,其他曲線的速度峰值均為2[7]。表3給出了6種凸輪曲線的加速度峰值和速度峰值的統(tǒng)計(jì)數(shù)據(jù)。

圖3 不同類型凸輪曲線
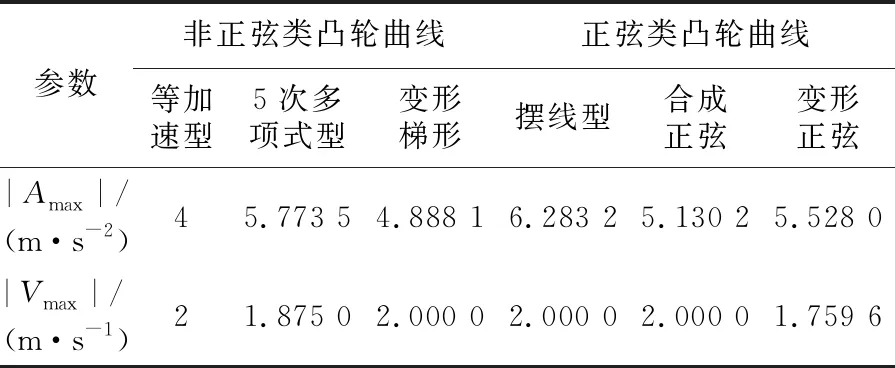
表3 不同類型凸輪曲線加速度峰值和速度峰值
4 機(jī)械手以不同加速度進(jìn)行運(yùn)動(dòng)對(duì)ROV位姿的影響
在6種加速度曲線方程和式(1)UVMS動(dòng)力學(xué)方程的基礎(chǔ)上,應(yīng)用ADAMS軟件對(duì)UVMS進(jìn)行運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)分析,分析機(jī)械手按不同運(yùn)動(dòng)曲線執(zhí)行相同動(dòng)作對(duì)ROV位姿產(chǎn)生的影響。
ROV本體質(zhì)量為900 kg,外形尺寸為2 100 mm× 1 200 mm×2 060 mm。四自由度機(jī)械手收縮時(shí)長度為760 mm,完全伸出時(shí)長度為980 mm。機(jī)械手材料為GCr15,材料密度為7 801 kg/m3,機(jī)械手在空氣中質(zhì)量為40 kg。令機(jī)械手在時(shí)間tf=1 s內(nèi)由收縮狀態(tài)到完全展開,其中關(guān)節(jié)1轉(zhuǎn)動(dòng)角度為π/12,關(guān)節(jié)2轉(zhuǎn)動(dòng)角度為5π/12,關(guān)節(jié)3伸長量為220 mm,腕部轉(zhuǎn)動(dòng)關(guān)節(jié)4轉(zhuǎn)動(dòng)角度為π/2。由t/tf=T和x/xf=X及6種凸輪曲線的位移方程,可以得到各運(yùn)動(dòng)關(guān)節(jié)的量綱位移方程。
以等加速型運(yùn)動(dòng)為例,此時(shí)機(jī)械手各關(guān)節(jié)位移與時(shí)間關(guān)系的表達(dá)式為:
(24)
(25)
(26)
(27)
對(duì)于其他形式的加速度曲線,可利用相同方式得到機(jī)械手各關(guān)節(jié)位移與時(shí)間關(guān)系的表達(dá)式。
按不同加速度類型曲線控制機(jī)械手運(yùn)動(dòng),可以得到ROV在x,y,z方向的位置偏差和繞x,y,z軸角度偏差的曲線如圖4和圖5所示,ROV絕對(duì)位姿偏差統(tǒng)計(jì)數(shù)據(jù)見表4和表5。
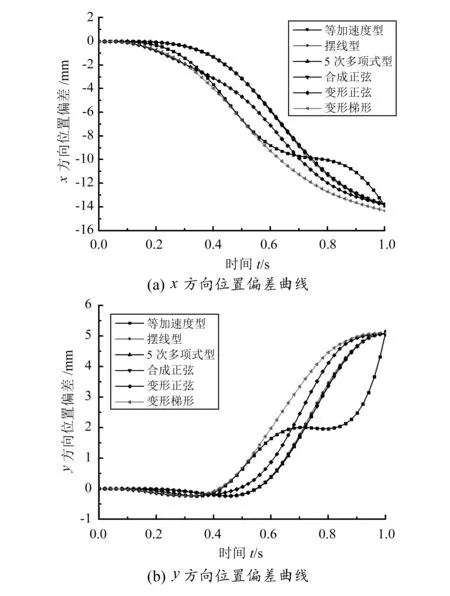
圖4 不同加速度運(yùn)動(dòng)規(guī)律對(duì)ROV位置偏差的影響
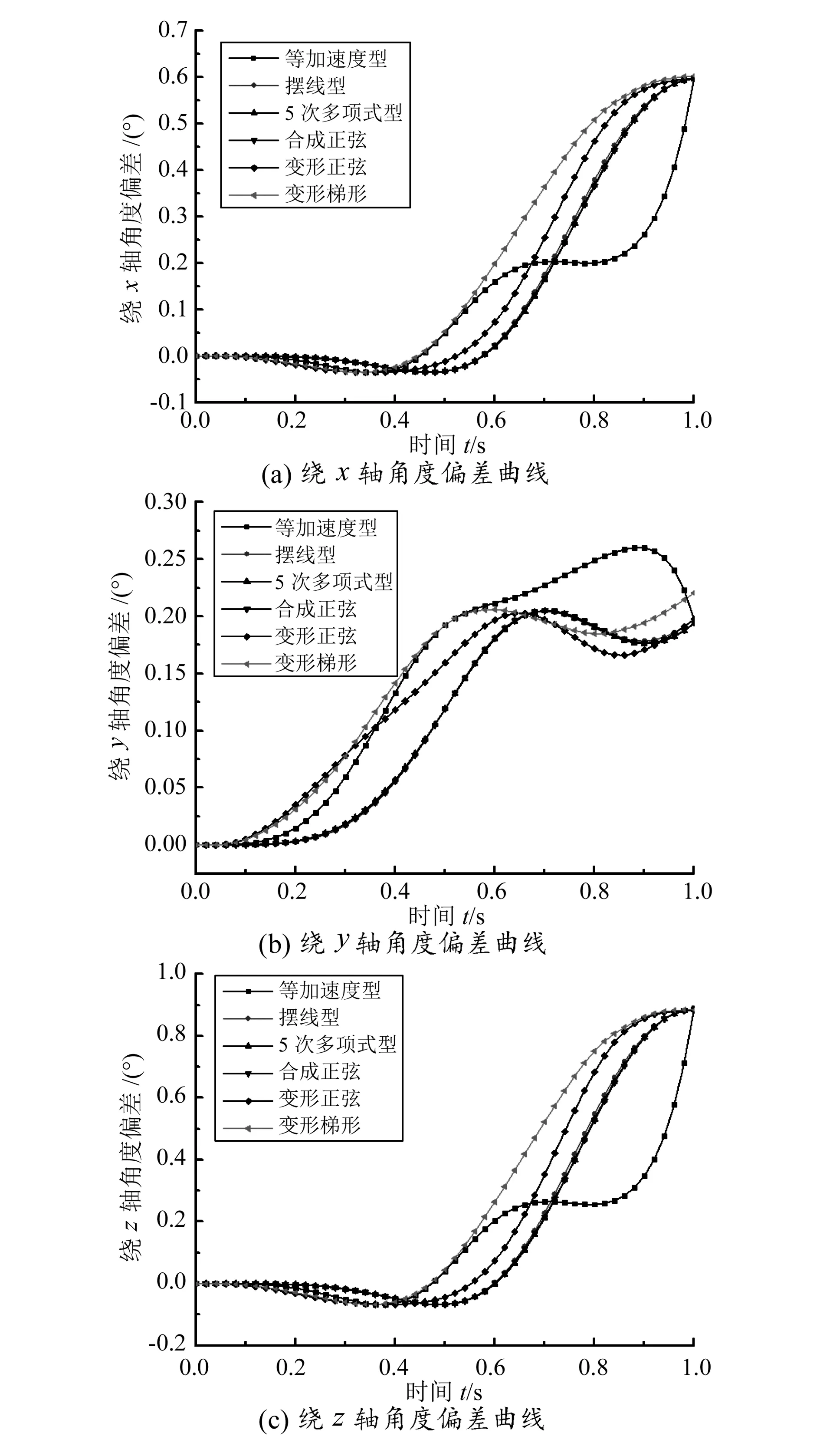
圖5 不同加速度運(yùn)動(dòng)對(duì)ROV角度偏差的影響
從圖4和圖5中可以看出,等加速度型方式下機(jī)械手運(yùn)動(dòng)對(duì)ROV位姿偏差的影響與其他幾種方式有明顯區(qū)別。等加速度型方式下機(jī)械手運(yùn)動(dòng)過程中ROV位置偏差曲線和角度偏差曲線波動(dòng)劇烈,說明在此運(yùn)動(dòng)方式下機(jī)械手和ROV之間存在強(qiáng)烈的耦合作用,機(jī)械手運(yùn)動(dòng)的交互作用力很容易對(duì)ROV位姿產(chǎn)生影響。從表4、表5可以看出,等加速型方式下ROV絕對(duì)位姿偏差最大值比較大,說明機(jī)械手停止運(yùn)動(dòng)時(shí)ROV位置偏差較大。
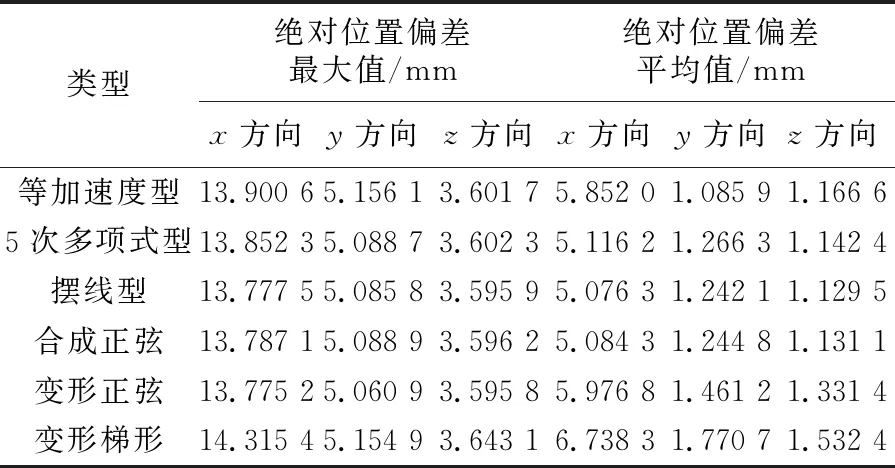
表4 不同加速度運(yùn)動(dòng)規(guī)律對(duì)ROV絕對(duì)位置偏差統(tǒng)計(jì)數(shù)據(jù)

表5 不同加速度運(yùn)動(dòng)規(guī)律對(duì)ROV絕對(duì)角度偏差統(tǒng)計(jì)數(shù)據(jù)
機(jī)械手在擺線型、5次多項(xiàng)式型和合成正弦方式下運(yùn)動(dòng)ROV位姿偏差曲線非常相近,并且曲線較為光滑。從表4、表5可以看出,擺線型運(yùn)動(dòng)方式下絕對(duì)位姿偏差平均值、絕對(duì)位姿偏差最大值都要小于5次多項(xiàng)式型和合成正弦方式,說明在擺線方式下ROV姿態(tài)受機(jī)械手運(yùn)動(dòng)影響較小,ROV位置偏差和角度偏差波動(dòng)較平緩。5次多項(xiàng)式型方式下絕對(duì)位姿偏差平均值、絕對(duì)位姿偏差最大值大于擺線型和合成正弦方式,說明該方式下ROV位置偏差曲線和角度偏差曲線波動(dòng)較為劇烈,在此運(yùn)動(dòng)方式下ROV位姿受機(jī)械手運(yùn)動(dòng)影響大。合成正弦方式下ROV絕對(duì)位姿偏差最大值和絕對(duì)位姿偏差平均值介于擺線型和5次多項(xiàng)式型中間,與擺線方式相比,機(jī)械手在此運(yùn)動(dòng)方式下ROV位置偏差和角度偏差曲線波動(dòng)稍顯劇烈。
從變形梯形方式下ROV位姿偏差曲線可以看出,在0.4 s后偏差值迅速變大,ROV位姿變化劇烈。在機(jī)械手動(dòng)作結(jié)束前的一小段時(shí)間內(nèi)ROV位置偏差和角度偏差增長緩慢,在此時(shí)間段內(nèi)ROV受機(jī)械手運(yùn)動(dòng)影響較小。從表4、表5可以看出,變形梯形方式下ROV的絕對(duì)位置偏差最大值在x,y,z方向分別為14.315 4 mm、5.104 9 mm和3.643 1 mm,繞x,y,z軸轉(zhuǎn)動(dòng)的絕對(duì)角度偏差最大值分別為0.603 2°、0.220 6°和0.885 3°,明顯大于其他幾種運(yùn)動(dòng)方式,說明在此運(yùn)動(dòng)方式下ROV位置偏差和角度偏差變化幅度最大。
從圖4、圖5可以看出,變形正弦方式下ROV位置偏差和角度偏差曲線與擺線型、5次多項(xiàng)式和合成正弦方式下的曲線較相近,波動(dòng)程度比其他3種方式下的曲線稍顯劇烈,但在0.8~1.0 s時(shí)間段內(nèi)ROV位置偏差和角度偏差變化緩慢。從表4、表5可以看出,變形正弦下絕對(duì)位置偏差最大值在x,y,z方向分別為13.775 2 mm、5.060 9 mm和3.596 1 mm,繞x,y,z軸轉(zhuǎn)動(dòng)的絕對(duì)角度偏差最大值分別為0.597 3°、0.202 7°和0.882 8°,都要小于其他幾種運(yùn)動(dòng)方式,說明在此運(yùn)動(dòng)方式下ROV位置偏差和角度偏差變化幅度最小。
通過上述分析可知,從ROV位置偏差極值和角度偏差極值方面考慮,變形正弦方式效果最好,其次為擺線型、合成正弦和5次多項(xiàng)式型,再者是等加速度型,最后為變形梯形。在此基礎(chǔ)上,還有必要分析機(jī)械手以不同運(yùn)動(dòng)方式對(duì)ROV位姿穩(wěn)定性影響的差異。對(duì)ROV位置偏差和角度偏差函數(shù)求導(dǎo),利用位置偏差導(dǎo)數(shù)和角度偏差導(dǎo)數(shù)分析機(jī)械手以不同加速度方式運(yùn)動(dòng)時(shí)ROV位姿變化穩(wěn)定性的差異。不同加速度運(yùn)動(dòng)規(guī)律下ROV位置偏差導(dǎo)數(shù)和角度偏差導(dǎo)數(shù)曲線如圖6和圖7所示。

圖6 不同加速度運(yùn)動(dòng)規(guī)律下ROV位置偏差導(dǎo)數(shù)
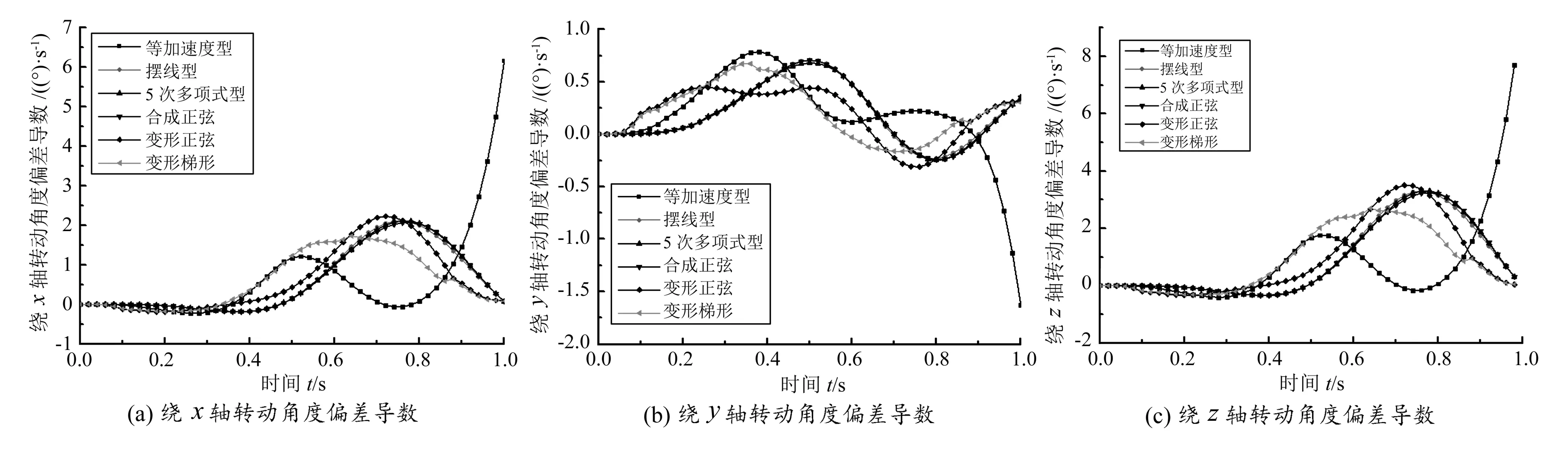
圖7 不同加速度運(yùn)動(dòng)規(guī)律下ROV角度偏差導(dǎo)數(shù)
ROV位置偏差導(dǎo)數(shù)和角度偏差導(dǎo)數(shù)也可以理解為ROV受機(jī)械手運(yùn)動(dòng)影響產(chǎn)生的線速度和角速度。從圖中可以看出,與其他幾種運(yùn)動(dòng)方式相比,等加速度型方式下ROV位姿偏差導(dǎo)數(shù)曲線的波動(dòng)程度較劇烈,t=1.0 s時(shí)位姿偏差導(dǎo)數(shù)與其他幾種運(yùn)動(dòng)方式相比差異較大,ROV絕對(duì)位姿偏差導(dǎo)數(shù)最終值要遠(yuǎn)大于其他幾種運(yùn)動(dòng)方式(見表6、表7),說明當(dāng)機(jī)械手停止運(yùn)動(dòng)時(shí)ROV仍保持較大運(yùn)動(dòng)速度,ROV位姿變化的穩(wěn)定性受機(jī)械手運(yùn)動(dòng)影響較大。
變形梯形方式下ROV位姿偏差導(dǎo)數(shù)曲線不光滑,但曲線的波動(dòng)程度較小。從表6、表7可以看出,絕對(duì)位置偏差導(dǎo)數(shù)最大值在x,y,z方向分別為0.028 9 mm/s、0.014 4 mm/s和0.008 5 mm/s,繞x,y,z軸轉(zhuǎn)動(dòng)的絕對(duì)角度偏差導(dǎo)數(shù)最大值分別為1.736 1(°)/s、0.522 9(°)/s和2.692 7(°)/s,要小于其他幾種運(yùn)動(dòng)方式,絕對(duì)位置偏差導(dǎo)數(shù)最終值、絕對(duì)角度偏差導(dǎo)數(shù)最終值也比較小,說明在變形梯形方式下ROV位姿最平穩(wěn)。
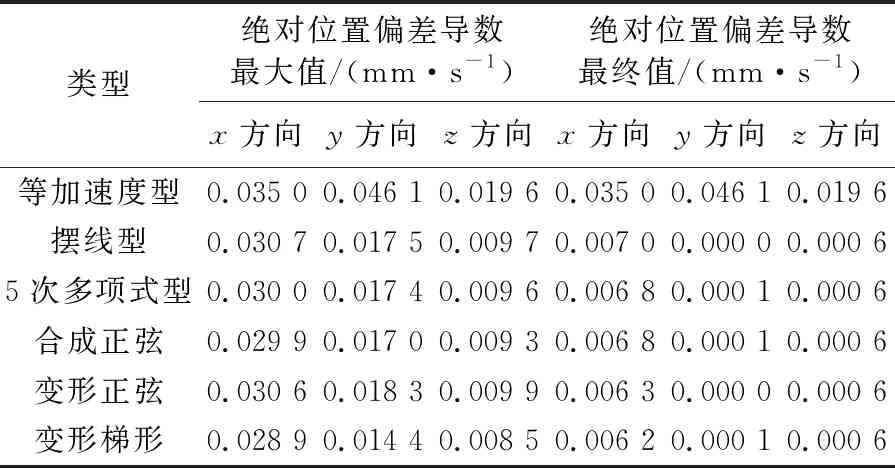
表6 不同加速度運(yùn)動(dòng)規(guī)律ROV絕對(duì)位置偏差導(dǎo)數(shù)統(tǒng)計(jì)數(shù)據(jù)

表7 不同加速度運(yùn)動(dòng)規(guī)律ROV絕對(duì)角度偏差統(tǒng)計(jì)數(shù)據(jù)
擺線型、5次多項(xiàng)式型和合成正弦方式下ROV位姿偏差導(dǎo)數(shù)曲線十分相近且光滑,從表6、表7可以看出,3種運(yùn)動(dòng)方式的絕對(duì)位姿偏差導(dǎo)數(shù)最終值比較接近,其中合成正弦方式下ROV絕對(duì)位置偏差導(dǎo)數(shù)最大值在x,y,z方向分別為0.029 9 mm/s、0.017 0 mm/s和0.009 3 mm/s,繞x,y,z軸轉(zhuǎn)動(dòng)的絕對(duì)角度偏差導(dǎo)數(shù)最大值分別為2.069 7 (°)/s、0.705 9(°)/s和3.248 1(°)/s,是3種運(yùn)動(dòng)方式下最小的,說明合成正弦方式下ROV位置偏差和角度偏差變化比較小。擺線型方式下ROV絕對(duì)位置偏差導(dǎo)數(shù)最大值和絕對(duì)角度偏差導(dǎo)數(shù)最大值略小于5次多項(xiàng)式方式,此運(yùn)動(dòng)方式下ROV位姿的平穩(wěn)性好于5次多項(xiàng)式。
從表6、表7可以看出,變形正弦方式下絕對(duì)位置偏差導(dǎo)數(shù)最大值和絕對(duì)角度偏差導(dǎo)數(shù)最大值略大于擺線型、5次多項(xiàng)式型和合成正弦方式,但絕對(duì)位置偏差導(dǎo)數(shù)最終值和絕對(duì)位置偏差導(dǎo)數(shù)最終值要略小于這3種運(yùn)動(dòng)方式,說明機(jī)械手以合成正弦方式運(yùn)動(dòng)的過程中ROV位置偏差和角度偏差變化較劇烈,但對(duì)ROV最終位姿的影響卻很小。
綜合以上分析,從ROV位置偏差和角度偏差變化的平穩(wěn)性考慮,變形梯形是比較好的選擇,其次為合成正弦、擺線型和5次多項(xiàng)式型,再者是變形正弦,而等加速度型最差。
5 結(jié)束語
UVMS中機(jī)械手運(yùn)動(dòng)時(shí)會(huì)對(duì)ROV本體的位姿產(chǎn)生影響,機(jī)械手以不同的加速度運(yùn)動(dòng)方式完成同一動(dòng)作時(shí)對(duì)ROV位姿的影響也不同。本文通過建立UVSM動(dòng)力學(xué)模型,基于凸輪曲線理論進(jìn)行仿真實(shí)驗(yàn),研究分析了機(jī)械手以不同加速度運(yùn)動(dòng)方式運(yùn)動(dòng)時(shí)對(duì)ROV位置偏差和角度偏差的影響,研究成果對(duì)機(jī)械手運(yùn)動(dòng)誤差補(bǔ)償具有一定的參考價(jià)值。
 機(jī)械設(shè)計(jì)與制造工程2020年11期
機(jī)械設(shè)計(jì)與制造工程2020年11期
- 機(jī)械設(shè)計(jì)與制造工程的其它文章
- 智能乒乓球陪練機(jī)器人結(jié)構(gòu)設(shè)計(jì)
- 一種網(wǎng)球陪練機(jī)的機(jī)構(gòu)設(shè)計(jì)
- 基于子結(jié)構(gòu)實(shí)驗(yàn)的橡膠減振器動(dòng)態(tài)特性預(yù)測(cè)研究
- 軌道交通高等減振和特殊減振措施下乘客煩惱率對(duì)比分析
- 基于NSGA-Ⅱ的飛機(jī)襟翼運(yùn)動(dòng)機(jī)構(gòu)多目標(biāo)優(yōu)化設(shè)計(jì)
- 基于桁架結(jié)構(gòu)優(yōu)化的復(fù)雜零件構(gòu)型設(shè)計(jì)方法