基于NSGA-Ⅱ的飛機襟翼運動機構多目標優化設計
2020-12-01 05:48:48陳炎
機械設計與制造工程 2020年11期
陳 炎
(上海飛機設計研究院,上海 201210)
襟翼作為飛機增升裝置的一部分,可以提高飛機的起飛、著陸性能,改善飛機進場速率、爬升率及進場飛行姿態[1]。為實現襟翼特定的運動軌跡需設計相應的運動機構。目前襟翼常用的運動機構有鉸鏈式、四連桿式和滑軌-滑輪架式[2]。若襟翼運動機構設計不合理,將對飛機的氣動性能及質量指標帶來不利影響,因此對襟翼運動機構進行優化設計研究具有十分重要的意義。
國內外學者對襟翼運動機構展開了相關研究,文獻[3]、[4]根據襟翼的運動軌跡分別通過解析法和幾何法得到了襟翼運動機構的相關參數;文獻[5]在考慮襟翼運動機構運動約束限制的基礎上,對襟翼運動軌跡重新進行了優化分析;文獻[6]對襟翼運動機構和襟翼氣動外形進行了多目標優化,實現了在提升飛機氣動性能的同時減少了襟翼運動機構的質量,但在優化過程中未考慮襟翼運動機構中滑軌質量的影響。
本文以襟翼運動機構中的滑軌-滑輪架式為例,以其運動學性能、動力學性能、質量指標為多目標優化函數,同時以運動機構的位移方程作為約束條件,利用帶精英策略的非支配排序遺傳算法(NSGA-Ⅱ)對襟翼運動機構進行優化設計,以提高襟翼運動機構的性能。
1 襟翼運動機構優化模型
1.1 襟翼運動機構工作原理及設計變量
滑軌-滑輪架式襟翼運動機構主要由曲柄、搖臂、滑軌、滑輪架組成,具體連接關系如圖1所示。滑軌-滑輪架式機構的工作原理為:驅動器驅動曲柄轉動,帶動搖臂運動,使襟翼和滑輪架沿滑軌移動,并實現襟翼特定的運動軌跡。以曲柄繞驅動器轉動的鉸鏈點A為原點建立坐標系,運動機構設計參數可以通過圖1中鉸鏈點B點、C點的坐標Bi(xBi,yBi)、Ci(xCi,yCi)表示,其中i=1,2,3,分別代表B點、C點在襟翼巡航、起飛、著陸的位置。可以將該3個鉸鏈點在襟翼巡航位置時的坐標作為本優化模型的設計變量X,即X={xA1,yA1,xB1,yB1,xC1,yC1}。
1.2 約束條件
襟翼的運動軌跡可以用襟翼在巡航、起飛、著陸位置時翼面上任意一點P的坐標及通過該點的某條直線與X軸之間的夾角表示,設P點在巡航、起飛、著陸時3個位置的參數為(xPi,yPi,θi)(i=1,2,3)。運動機構設計變量之間的約束關系可利用剛體導引機構的設計方法[7]得出,由于曲柄需繞驅動器旋轉,曲柄坐標參數在襟翼巡航、起飛、著陸位置需滿足定長約束方程:
(xBi-xA1)2+(yBi-yA1)2=(xB1-xA1)2+(yBi-yA1)2i=2,3
(1)
同時滑輪架在滑軌上平移,滑輪架坐標參數在襟翼巡航、起飛、著陸位置需滿足定斜率約束方程:
(2)
Bi和Ci點在襟翼巡航、起飛、著陸位置的坐標由坐標變換關系確定:
(3)
(4)
式中:D1i為剛體位移矩陣,由P點的位置參數確定:
i=2,3
(5)
為保證滑輪架的安裝空間,鉸鏈點C1到襟翼弦線beg的距離lcb需滿足相應約束條件,即
lcb≥d
(6)
式中:d為lcb下限約束。
運動機構設計變量還需滿足邊界約束條件:
lb≤X≤ub
(7)
式中:lb和ub分別為變量X的下限和上限約束。
1.3 目標函數
目標函數根據實際優化目標進行選取,優化目標的側重點不同,目標函數的選取也不同。對于襟翼運動機構來說,除了要實現襟翼特定的運動軌跡,還要考慮其對飛機質量、氣動阻力的影響,具體如下:
1)襟翼運動機構的質量。
襟翼運動機構的質量越小越有益于飛機的經濟性。襟翼運動機構主要由曲柄、搖臂、滑軌、滑輪架組成,為了簡化目標函數,假設這些零件的材料密度和截面面積一致,因此襟翼運動機構的質量可由上述零件的長度之和函數f1(X)表示,即
f1(X)=|B1-A1|+|C1-B1|+|D13C1-C1|
(8)
式中:A1,B1,C1為3個鉸鏈點在襟翼巡航位置時的坐標。
2) 襟翼運動機構的氣動阻力。
襟翼運動機構位于機翼后緣處,為實現襟翼的運動,其高度通常比翼盒的高度高,因此會對飛機氣動效率帶來不利影響:運動機構高度越高,其迎風面積越大,導致飛機氣動阻力增大,飛機氣動效率降低。襟翼運動機構的氣動阻力可由襟翼運動機構的高度函數f2(X)表示,并且實際高度由搖臂的長度和滑軌最低點的位置決定,即
f2(X)=max[|B1-A1|,|L·D13C1|]
(9)
式中:L=[0 1 0]。
3) 襟翼運動機構的驅動載荷。
襟翼運動過程中運動機構由驅動器提供的驅動載荷M驅動。M越大,驅動器的設計成本和質量越大,從減少飛機設計成本和減重角度出發,在整個襟翼運動過程中M的峰值應越小越好。

M+F·lAF=T·lAT
(10)
式中:lAF,lAT分別為A點到氣動載荷方程F和支撐力方程T的距離。
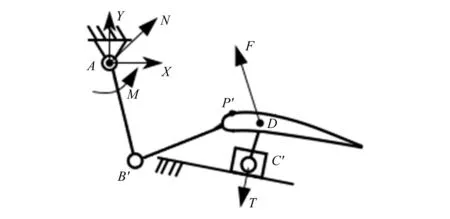
圖2 襟翼運動機構受力示意圖
再對B′點取力矩平衡,得
F·lB′F=T·lB′T
(11)
式中:lB′F,lB′T分別為B′點到氣動載荷方程F和支撐力方程T的距離。
根據方程(10)、(11),驅動載荷可表示為
(12)
假設氣動載荷F為已知量,驅動載荷M可由等效驅動力臂函數f3(X)表示,即
(13)
2 襟翼運動機構優化實例分析
由第1章可以看出,襟翼運動機構優化是一個典型的多變量、多目標的優化問題,3個目標函數都很重要,關系到襟翼運動機構的質量、氣動性能,還會影響飛控系統的驅動能力。如果對此問題采用傳統的多目標優化算法,不但求解速度慢、效率低,同時還會依賴目標函數中權重參數的選取。文本選用了帶精英策略的非支配排序遺傳算法[8](NSGA-Ⅱ)進行優化,該算法具有收斂速度快、魯棒性好、穩健性強等特點,已成功應用于多目標優化領域。由于優化過程涉及非線性約束條件,導致計算效率下降,因此本文采用了二元錦標的約束處理方法[9],加快了計算收斂速度。
設置NSGA-Ⅱ算法的優化參數為:最前端系數為0.3、種群大小為200、進化代數與停止代數均為200、交叉概率為0.8、變異概率為0.01、適應度函數值偏差為1×10-4,其余輸入參數值見表1。根據以上參數繪制Pareto前端,結果如圖3所示。
從圖3中可以看出,每個點對應一個 Pareto最優解,各 Pareto最優解之間沒有優劣之分。針對各 Pareto最優解,可以根據經驗和對各目標的重視程度從中選出最滿意的解,并與原始設計進行對比,對比結果見表2。

表1 輸入參數清單
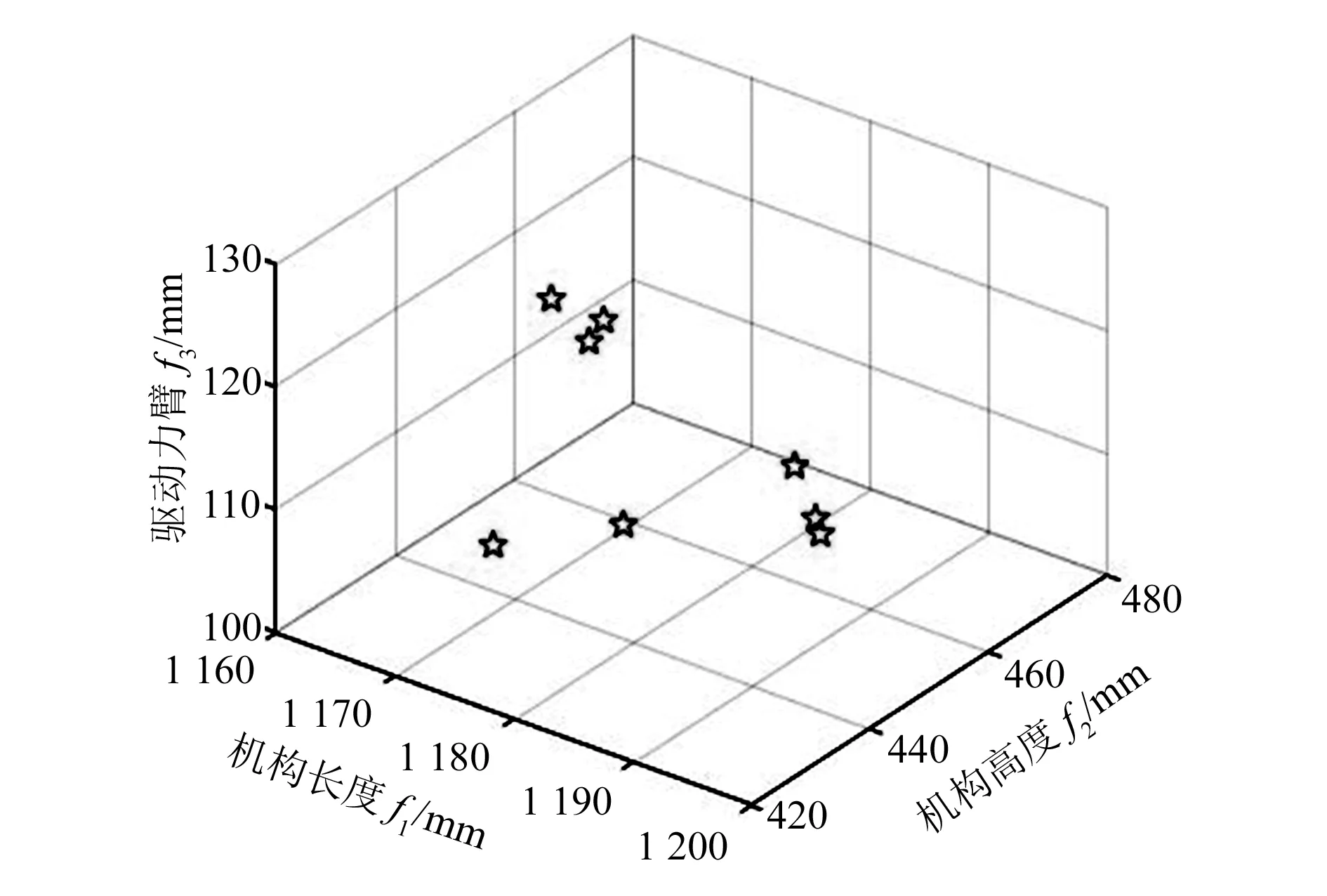
圖3 Pareto最優解集示意圖

表2 所選優化方案與原始設計對比
從表2的對比中可以看出,選出的Pareto最優解與原始設計數據相比3個目標都有一定程度的改善,優化后的襟翼運動機構質量減少了3.9%,氣動阻力減少了0.69%,驅動載荷峰值減小了15.4%。
3 結束語
本文采用NSGA-Ⅱ優化算法對襟翼運動機構進行多目標優化,并根據襟翼運動機構的運動特點設定約束條件,優化結果表明,襟翼運動機構在滿足襟翼運動軌跡的前提下,能有效降低飛機質量,改善飛機氣動性能,降低飛機設計成本。本文為襟翼運動機構初始設計和多目標優化提供了一種分析方法,也為后續進行深入研究提供了參考依據。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
環球時報(2022-05-30)2022-05-30 15:16:57
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
當代陜西(2019年11期)2019-06-24 03:40:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
Coco薇(2017年5期)2017-06-05 08:53:16