整車下線EPS 刷寫偶發性失敗問題分析與方案優選
2020-11-27 08:47:56陳江波涂將輝夏永強趙能卿賈和平
汽車電器 2020年11期
關鍵詞:指令
陳江波, 涂將輝, 夏永強, 趙能卿, 李 娟, 賈和平
(江鈴汽車股份有限公司, 江西 南昌 330001)
下線EOL診斷儀是汽車主機廠生產下線時的重要生產工具[1],整車項目開發后期需要進行EOL設備進行聯調以滿足生產的需求[2]。EOL設備一般具有讀取模塊軟件故障碼、清除模塊軟件故障碼、模塊軟件功能自動識別配置、特殊功能學習、模塊軟件刷寫更新等功能[3]。EOL功能指令的發送時序與時間參數的設置是根據產線工序、軟件特殊需求、下線流程來定義[4]。ECU Bootloader刷寫是根據UDS協議開發定義[5]。
1 軟件刷寫電氣原理
圖1為EPS模塊(電動助力轉向) 診斷通信的路徑,刷寫指令由EOL設備發送,經網關從動力CAN路由轉發至EPS所在總線上,EOL發送指令,各模塊根據診斷通信規范做出正響應或否定響應 (設定條件不符時),EOL根據得到的響應進行下一步的指令發送。

圖1 EPS模塊診斷通信的路徑

圖2 EPS模塊刷寫流程
圖2 為EPS軟件刷寫流程,EPS進入刷寫之前需要對診斷模式切換,需要從默認會話模式(正常工作狀態) 進入拓展會話模式(響應拓展模式下的指令),再進入編程模式 (響應編程模式下的編程指令可以對EPS進行刷寫操作)。通過圖2步驟實現整車軟件刷寫過程,這些流程按照順序執行,任何步驟出現問題,如出現負響應,EPS的刷寫過程都會被中斷導致刷寫失敗。
2 故障現象
項目投產階段總裝工廠反饋有部分下線車輛配置線上出現EPS刷寫一次測試不通過情況,經過錄制數據跟蹤問題主要是以下兩種失敗情況:①10臺左右車失敗的原因為31 01 FF 02回復了7F 31 7F。②EPS模塊未有任何響應(含7DF指令和721),功能尋址10 83/85 82發出EPS并沒有正響應。針對以上兩種刷寫失敗情況,得到問題出現的3種可能原因。
1) 反饋負響應的模塊有SWM (組合開關)、EPS (電動助力轉向)、SRS (安全氣囊),3個模塊均對28指令反饋7F,這3個模塊在CCAN上,而EOL設備發送指令是在PCAN上,說明很大概率是網關丟幀導致包括10 83指令在內的很多指令未成功轉發至模塊終端,指令缺失導致不符合EPS刷寫流程,EPS對后面轉發過來的指令給出7F反饋,不執行后續的刷寫命令。
2) EPS軟件問題,軟件未按照流程開發,導致出現報錯情況。
3) 轉向盤異動導致失敗,可能會影響刷寫模塊出現負響應。
3 問題分析
3.1 情況1問題分析
針對以上兩個刷寫失敗的情況,經過確認情況①EOL設備31 01 FF 02回復7F 31 22,下線在對EPS進行刷寫時,方向盤被有意觸動后,電動助力轉向系統轉向機扭矩會出現波動,容易產生EPS刷寫失敗;EPS刷寫時需要監控的因素主要有方向盤扭矩處、車速、發動機狀態、供電電壓,其中任何一個條件不滿足都無法完成刷寫流程。EPS在進入編程模式時觸碰方向盤導致EPS內部的扭矩傳感器波動,出于整車安全考慮,EPS軟件刷寫編程是不允許出現扭矩波動情況(上限值2.5Nm),出于安全考慮的原因是確保在無駕駛員操作車輛,即EPS處于非工作狀態,EPS軟件才能進入再編程模式。
3.2 情況2問題分析
根據圖3所示問題數據1分析,在T=150.434542和T=150.693814兩個時間點,PCAN上有診斷報文7DF,但網關未將其轉發至CCAN。直到T=150.953830時,PCAN上出現第3幀診斷報文時,網關GW才開始將診斷報文路由到CCAN。之后各模塊反饋否定響應碼7F導致刷寫失敗。根據數據分析刷寫失敗原因初步定位為網關未轉發診斷報文導致 (CAN1:PCAN,CAN6:CCAN,CAN8:BCAN)。
網關未轉發診斷報文是否正常需要繼續分析,從圖3中T=144.311722可知BCAN上下線測試設備在BCAN上發送0x763 TBOX診斷請求及診斷響應,當前診斷優先級為BCAN;之后0x763報文停發,BCAN上做其他模塊 (0x732/0x7E0) 本地診斷,當前診斷不需要網關處理,網關會從最后一幀0x763開始5s診斷報文超時計時;而在T=150.434542時,發送第1幀0x7DF時,此時網關會認為BCAN/PCAN診斷報文已超時,如果超時后TCAN上有診斷報文,則會將診斷優先級切換至TCAN;此時再請求0x7DF會涉及一次診斷優先級從TCAN->PCAN的過程,而這一過程中,TCAN診斷報文未超時,此時會有500ms延時處理PCAN診斷請求的計時器,這也就是前面0x7DF報文網關未處理,而在T=150.953830時,0x7DF開始從PCAN正常路由至CCAN。因此,根據進一步分析,網關漏轉報文是因為TBOX有診斷請求導致。
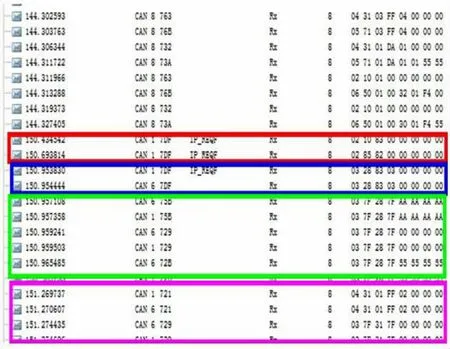
圖3 問題數據1
根據深入分析發現:按照下線匹配流程,在問題數據2(圖4) 中T=85s,下線設備對TBOX進行了一次硬件復位;按照TBOX和網關握手認證策略,此時TBOX需要發起握手認證流程,如未握手認證成功,TBOX會一直發0x760嘗試和網關進行握手認證;又由于網關未經過重啟,不滿足網關握手的條件,未進入等待握手流程狀態。
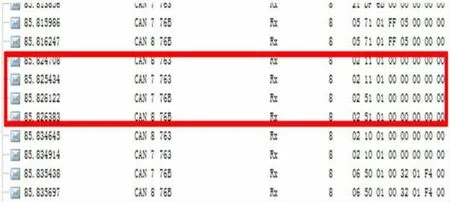
圖4 問題數據2
綜上所述,從流程上梳理問題根本原因如下所述。
1) 根據EOL下線流程,需要先完成TBOX模塊與PEPS模塊之間的匹配認證(TBOX學習完成SC碼),然后會執行硬件復位,復位后就開始和網關進行認證 (TBOX會發出網關診斷0x760報文)。
2) 按照TBOX與網關握手認證策略,GW網關未執行上下電操作,網關不會對該握手認證指令進行響應。導致TBOX握手失敗情況,總線上會一直發送網關診斷0x760報文。
3) 在完成TBOX和PEPS匹配認證后,EOL流程會等待6s后才開始執行EPS模塊刷寫操作,此時TBOX還在發送網關診斷0x760報文。
4) 按照網關診斷策略,Tester/EOL設備的診斷優先級高于T-Box模塊自身的診斷優先級,如果BCAN、PCAN上5s未收到任何診斷指令時,此時如TCAN上出現診斷報文,網關會將本地診斷模式切換為遠程模式。車子下線時,出現TBOX握手報文,正好處于5~6s的時間段內,網關將會把診斷路由模式切換為遠程模式。
5) 當網關在PCAN收到EPS刷寫的第1條報文時,此時依據本地診斷優先級高于遠程診斷策略原則,會將診斷路由模式切換為本地診斷模式,但考慮遠程診斷還在進行,預留了一個500ms的切換時間。該段時間內的本地診斷報文不會路由,從而導致EPS刷寫失敗。
4 整改方案優選
按照刷寫失敗原因分析,有以下3個方案去解決該問題。
1) 網關修改軟件,將網關的等待握手流程開始的條件修改為任意時刻。當前只有上電或者喚醒時,網關會響應進行握手協議。把網關的等待握手流程修改為任意時刻,只要TBOX發送握手協議指令,網關響應后停止發送指令,就可以完全避免出現EPS刷寫時從診斷報文不會路由的情況。考慮到更改GW軟件時間周期較長,且涉及開發費用,因此建議不采用。
2) TBOX修改軟件,TBOX按照其他項目,在下線的前20min內不進行診斷。此次刷寫失敗的原因主要是因為TBOX需要進行診斷,進行診斷之前需要通過握手實現診斷通信,前20min不進行握手通信,就可以完全避免出現EPS刷寫時出現漏轉發診斷信號的情況。但是由于修改TBOX軟件時間周期長,同時還需要進行聯調測試,因此建議不采用。
3) 修改EOL流程,調整硬件復位時間,由于EOL在整個流程結束會進行一次7DF的硬件復位,將TBOX學習完SC碼后的硬件復位取消。在EPS刷寫過程中不會出現握手指令,使得GW始終處于本地診斷模式,GW進行正確的報文轉發,不會出現停止發送報文的情況。且該方案不涉及開發費用,經評估方案可行,同時經過聯調測試,該方法測試驗證通過,未對其他下線流程產生影響。綜上所述,此方案為最優方案。
5 結論
針對下線EOL設備對EPS模塊進行Bootloader刷寫時出現偶發性失敗情況,對問題進行跟蹤并錄制CAN總線數據進行分析,結合下線流程詳細分析了出現問題的根本原因,同時提出3種修改策略。對3種修改策略分別分析方案的可行性,分析結果表明:通過調整下線流程取消TBOX的硬件復位,并在整個下線流程結束后進行整車所有模塊硬件復位,徹底解決了這類問題。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
