地鐵高空作業車整車防傾覆性能設計及計算研究
2020-11-24 06:48:36徐照新高海軍
機械工程師 2020年11期
關鍵詞:作業
徐照新,高海軍
(中車山東機車車輛有限公司研究院,濟南250000)
0 引 言
高空作業車是一種采用液壓作為動力,可以載人和工具到達3 m以上的高空進行作業的特種車輛。為了保證工作人員高空作業的安全性,在設計高空作業車時都應該考慮其防傾覆設計,防止在正常作業時高空作業車發生傾覆[1]。
一般公路上或工地上使用的高空作業車,由于作業地點空間比較空曠,常采用外伸支腿來防止車輛發生傾覆[2]。但是在地鐵隧道中,由于作業地點特殊,公路上成熟的防傾覆方案不再適用,所以需要一套特別針對地鐵環境使用的防傾覆方案。
防傾覆性能對于地鐵高空作業車至關重要,地鐵高空作業車登高作業時主要任務是維修接觸網和隧道壁,一旦發生傾覆,不僅會造成作業人員傷亡,還會損壞地鐵線路,造成地鐵無法正常運營。所以,設計時要求地鐵高空作業車在任何作業工況下均不會發生傾覆。
1 地鐵高空作業車防傾覆系統設計
如圖1所示,地鐵高空作業車主要由司機室、固定作業平臺、發電機組、高壓清洗系統、曲臂式高空作業平臺等組成。曲臂式高空作業平臺設有三回轉機構,垂直最高高度為12 m(距軌面),水平最遠工作距離為11.7 m(距軌道中心線),可以使人和工具方便繞過接觸網對隧道壁全斷面進行檢修作業,高空作業平臺作業過程中不會與接觸網發生干涉,額定載荷為300 kg。

圖1 地鐵高空作業車
曲臂式高空作業平臺的回轉減速機在液壓動力下帶動小齒輪轉動,通過齒輪嚙合實現回轉支撐、臂體及其以上裝置的回轉。變幅油缸將各級臂體舉升到一定角度,多個伸縮油缸將各級臂體及平臺舉升到一定高度,使安裝在臂體端部的作業平臺上升到所需高度。連桿機構在油缸作用下,通過結構位置變化實現作業平臺小范圍內回轉。回轉與伸縮的配合作用,使人員到達指定工作區域。
地鐵高空作業車主要參數如表1所示。
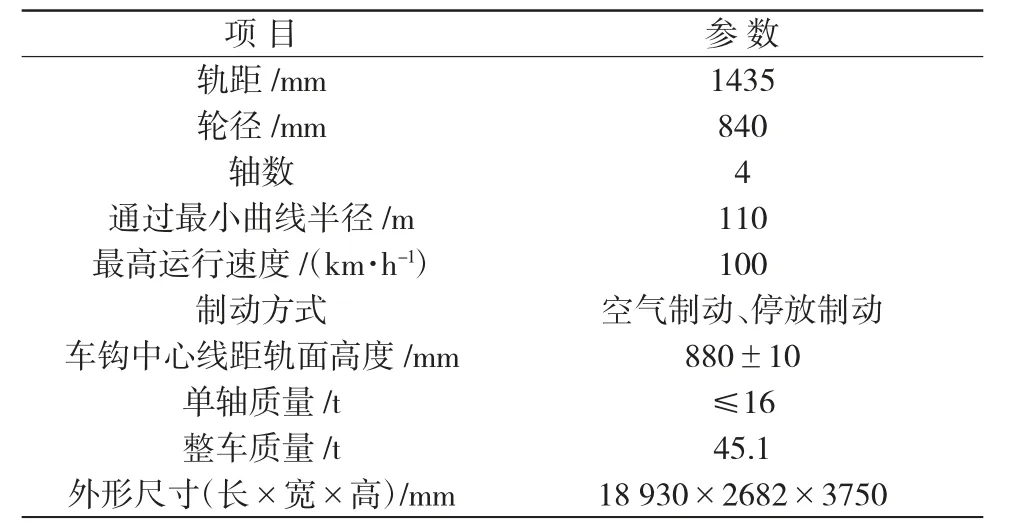
表1 地鐵高空作業車主要參數
曲臂式高空作業平臺主要參數如表2所示。

表2 曲臂式高空作業平臺主要參數
由于地鐵車輛的特殊性,支腿裝置無法外伸,且轉向架懸掛系統剛度不足,所以防傾覆系統的設計采用以下3種結構:
1)采用液壓支腿將車輛支撐在鋼軌上,使車輛與鋼軌之間形成剛性連接。地鐵高空作業車共設有2對支腿裝置,分別位于車輛前、后兩端的左右兩側。該支腿位于鋼軌正上方,下部帶有一走行滾輪。曲臂高空作業機具不工作時,不用支腿,此時支腿位于軌面上方。當高空作業機具工作時,支腿伸出,落在軌面上,傳遞車輛上部載荷。
如圖2所示,支腿裝置主要由操作手柄、鎖緊總成、伸縮油缸、滾動裝置、液壓系統、內導套、外導套等組成。鎖緊總成的目的是防止支腿在收回狀態時,車輛行駛時的振動使支腿意外落下。滾動裝置在支腿發生故障時可以使車輛以不超過10 km/h的速度行駛,保證線路的正常運營。
Research based on the H7N9 Avian Flu Virus transmission problem
液壓系統額定壓力為20 MPa,系統流量為20 L/min。為了減少系統冗余,液壓支腿和高空作業平臺共用一個液壓站,使用手動換向閥切換液壓油到支腿或高空作業平臺。
控制部分由2個三位六通的手動換向閥組成,換向手柄即是操作手柄,可以控制支腿伸縮油缸的伸縮。使用2個液控單向閥實現伸縮油缸的雙向閉鎖,而液壓油可以通過換向閥的中位直接回流到油箱,節能高效。
2)充分考慮線路條件、軸重和經濟性,適度增加車體自重,以增加安全力矩。采用配重塊的方式增加車重,配重塊使用鐵板焊接,內部裝填沙子,安放在車體兩側的型鋼內部,最終使整車質量增加到45 t左右。
3)為解決安全力矩不足,車輛兩側各安裝一組抓軌器(如圖3),保證車輛和鋼軌牢牢地連接在一起。
抓軌器主要由吊桿、螺母、鏈條、夾軌鉗、鎖緊框等組成,放下時由鎖緊框的重力作用使夾軌鉗夾住鋼軌,不會意外脫出,收回時可把鎖緊框吊在安裝座上,不會超出限界,影響行車安全。

圖2 支腿裝置
圖3 抓軌器放下及收回圖
整車防傾覆系統設計原理圖如圖4所示。
圖4 整車防傾覆系統設計原理圖
2 防傾覆性能計算及校核
在上述防傾覆系統設計的基礎上,下面將介紹一種地鐵高空作業車防傾覆性能計算方法,并利用該計算方法進行校核。車輛在發生傾覆時總是繞支腿與鋼軌接觸線傾覆,我們將支腿與鋼軌的接觸線定義為傾覆線。將傾覆線以內的質量相對于傾覆線產生的力矩作為安全力矩,傾覆線以外的質量相對于傾覆線產生的力矩作為傾覆力矩。
2.1 載荷和力的確定
首先確定組成安全力矩和傾覆力矩的載荷和力,載荷和力主要包括以下五大部分:1)高空作業機具的額定載重量;2)結構載荷(自重);3)風載荷;4)手動操作力;5)特殊載荷和力。
2.1.1 高空作業機具的額定載重量額定載重量m由人的質量和工具的質量組成:

一般而言,額定載重量的值由高空作業平臺設計廠家給出,所有這些載荷均作用在產生最不利結果的位置[3]。
2.1.2 結構載荷(自重)
結構載荷M由車輛各部分自重組成:

結構本身的質量產生的載荷方向豎直向下,作用在質心位置。
2.1.3 風載荷
由于地鐵高空作業車是工作在露天環境中,所以應考慮風載荷影響。一般認為車輛是受風壓100 N/m2的作用,相當于風速12.5 m/s(風力等級6級)[1]。
風力水平作用在車輛零部件、工作平臺上的人員、工具和材料表面的中心,并視為動態力乘以1.1倍系數。

登高作業的工作人員一個人的全面積按0.7 m2計算,面積中心位于工作臺面以上1.0 m[4]。
2.1.4 手操作力
設計僅承載一個人員時,手操作力按200 N計算,設計承載一人以上時手操作力按400 N計算,該力作用于平臺面以上1.1 m高度位置。手操作力視為動態力,應乘以系數1.1,作用于產生最大傾覆力矩的方向。
2.1.5 特殊載荷和力高空作業平臺在特殊的工作方法和使用條件下會產生特殊載荷和力,例如承載大型物體承受風力等。
2.2 最惡劣工況的確定
確定完載荷和力之后,應確定車輛工作的最惡劣工況,并在該工況下進行計算。由于軌道高空作業車工作在鋼軌上,鋼軌存在軌道超高的情況(一般外軌比內軌高150 mm),當車輛位于軌道超高位置時,所產生的傾覆力矩最大,安全力矩最小。一般選取靜態和動態兩種工況分別進行計算。所以最惡劣工況為位于軌道超高時的側傾(靜態)和位于軌道超高下降到極限位置時的側傾(動態)。動態工況下,額定載重量和結構載荷均應視為動態載荷,一般處理方式為將額定載重量和結構載荷各乘以0.1系數,作用在產生最大傾覆力矩的方向上[5]。
2.3 各載荷和力的計算
下面以地鐵高空作業車為例,進行傾覆性能計算,載荷及工況如表3所示。
表3 載荷及工況

圖5 地鐵高空作業車試驗
工況一:位于軌道超高時的側傾穩定性。
1)安全力矩計算結果如表4 所示。
2)傾翻力矩計算結果如表5所示。
結果分析:

則抓軌器最大應力為50088÷2÷(0.25×3.14×182)=98.5MPa<235 MPa,安全。
工況二:位于軌道超高下降到極限位置時的側傾穩定性。

表4 安全力矩計算結果
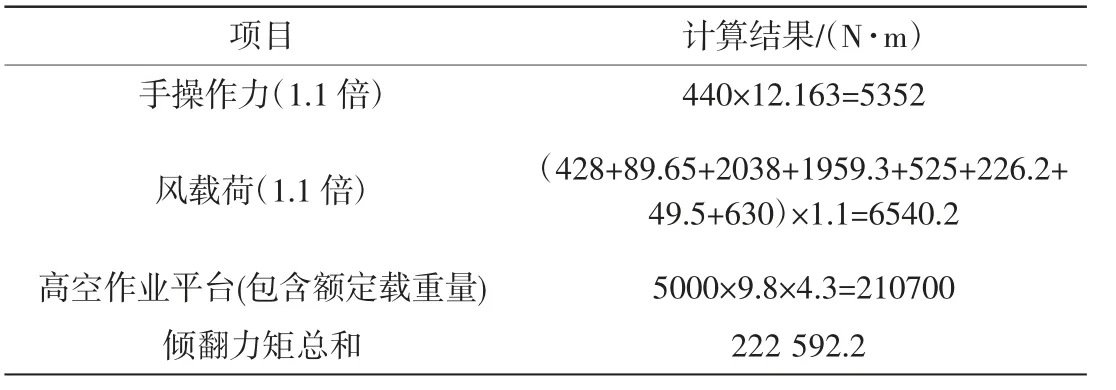
表5 傾翻力矩計算結果
工況二的計算與工況一類似,最終計算得到的安全力矩為150 716 N·m,傾翻力矩為242 431.1 N·m。抓軌器最大應力為125.6 MPa<235 MPa,所以也是安全的。
3 試驗和結論
根據地鐵高空作業車的試驗情況,在吊蘭滿載的情況下,進行工況一和工況二試驗,在高空作業機具極限伸出作業時,抓軌器繃緊,車輛穩定停放,作業時無任何晃動,證明該計算方法正確可靠。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學畫報(2009年9期)2009-09-14 03:18:56
