基于視覺引導(dǎo)的LED打標移送進給控制系統(tǒng)研究
2020-11-24 07:23:16梅陽寒劉志偉舒雨鋒
機械工程師 2020年11期
梅陽寒,劉志偉,舒雨鋒
(東莞職業(yè)技術(shù)學(xué)院 機電工程學(xué)院,廣東 東莞523808)
0 引 言
近年來,政府對半導(dǎo)體行業(yè)的大力支持推動了我國LED 封裝行業(yè)的跨域式發(fā)展。經(jīng)過十多年的發(fā)展,中國已成為世界LED 封裝器件的制造中心,但是在LED 晶片過程中,往往忽略了引線支架移送定位精度對焊線質(zhì)量的影響[1],在設(shè)備運動工作中,送料進給系統(tǒng)是直接通過傳動機構(gòu)推動支架移動,其性能將直接影響到支架移動的定位精度及可靠性。在實際LED 晶片打標過程中,設(shè)備現(xiàn)場環(huán)境是比較復(fù)雜的,特別是進給控制系統(tǒng)在運行過程中,比較容易受外部環(huán)境的影響。另外,進給移動速度的變化是非線性的,使得實際控制過程難于達到很好的定位效果[2]。針對存在的這些缺陷及問題,本研究設(shè)計的一種基于視覺檢測反饋的微進給控制系統(tǒng),采用了一套粗微控制進給運動機構(gòu),構(gòu)建了其動力學(xué)模型,通過測試檢驗,有效地縮短了遠距離運行時間,保證了近距離精確定位效果。
1 進給控制系統(tǒng)總體設(shè)計
LED 晶片進給控制系統(tǒng)是由電動機、螺桿機構(gòu)、單自由度的粗微移動控制裝置構(gòu)成,設(shè)計的主要思路為:在粗工作臺運動過程中,微結(jié)構(gòu)隨動不起作用,完成主要長距離的進給;而微結(jié)構(gòu)運動時,粗工作臺不參與工作,完成短距離的微進給,如圖1 所示。具體工作過程為:在系統(tǒng)接受到運動控制信號后,電動機帶動螺桿機構(gòu)運動,實現(xiàn)工作平臺的粗位移,視覺檢測系統(tǒng)獲取了粗位置后,給微運動發(fā)出控制信號,壓電陶瓷動作帶動平臺完成微進給。
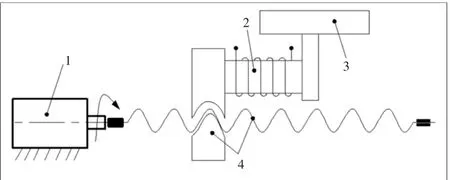
圖1 進給機構(gòu)示意圖
圖3 控制接線圖
LED 晶片打標工作臺的粗進給運動主要由工控機控制步進電動機來實現(xiàn),軟件主要控制過程由視覺檢測系統(tǒng)對工作平臺末端位置進行檢測,與標定的位置進行比較,通過圖像采集系統(tǒng)數(shù)據(jù)處理,識別出實際位差,再把位差信號傳輸給電動機控制系統(tǒng),作為電動機、螺桿驅(qū)動控制信號,當粗進給作用使工作臺到達預(yù)定位置,電動機開始減速直到停止,在到達精密控制階段之前,控制接口發(fā)送信號使電動機停止工作,實現(xiàn)粗定位;工作臺的微進給控制是由壓電陶瓷來實現(xiàn),控制信號也是由視覺檢測系統(tǒng)獲得圖像信息進行后處理獲得的,工作臺的目標位置標定是實現(xiàn)精確定位的關(guān)鍵,總之,系統(tǒng)運行是分兩部分:1)采用步進電動機、螺桿機構(gòu)實現(xiàn)毫米級到微米級的長距離操作;2)采用壓電精密驅(qū)動器實現(xiàn)微米級到亞納米級的微位移[3]。
2 粗微工作臺模型構(gòu)建
LED 晶片打標機移送系統(tǒng)主要是通過移送控制系統(tǒng)把支架上的燈杯位一個一個地移送到打標指定位置,在這個過程需要移送進給工作臺有很好的動態(tài)響應(yīng)特性和定位精度。為了達到這些特性要求,設(shè)計采用螺母絲桿機構(gòu)傳動、壓電陶瓷為驅(qū)動相結(jié)合的粗微進給控制機構(gòu)。粗微進給工作臺在工作的過程中受到靜態(tài)和動態(tài)的作用力,在常規(guī)控制中,主要是通過改變響應(yīng)頻率和控制系統(tǒng)阻尼等來提高工作臺的動態(tài)響應(yīng)特性,但在實際使用中受壓電陶瓷材料本身具有磁滯特性的影響,壓電陶瓷驅(qū)動器性能受到一定的制約[4-5]。因此,通過建立粗微工作臺的動力學(xué)數(shù)學(xué)模型,對于提高工作臺的抗干擾和瞬態(tài)響應(yīng),提高工作臺的動態(tài)特性具有重要的意義。
構(gòu)建螺母絲桿傳動、壓電陶瓷為驅(qū)動相結(jié)合的粗微進給控制機構(gòu)動力學(xué)數(shù)學(xué)模型,采用的構(gòu)建方法是將系統(tǒng)簡化為彈簧、質(zhì)量和阻尼三者組成的二階系統(tǒng)。為了方便建立模型,將粗、微工作臺考慮為動態(tài)耦合和串聯(lián)系統(tǒng),且為雙輸入-雙輸出系統(tǒng),即粗、微位移輸入和粗、微位移輸出。

圖4 進給系統(tǒng)模型
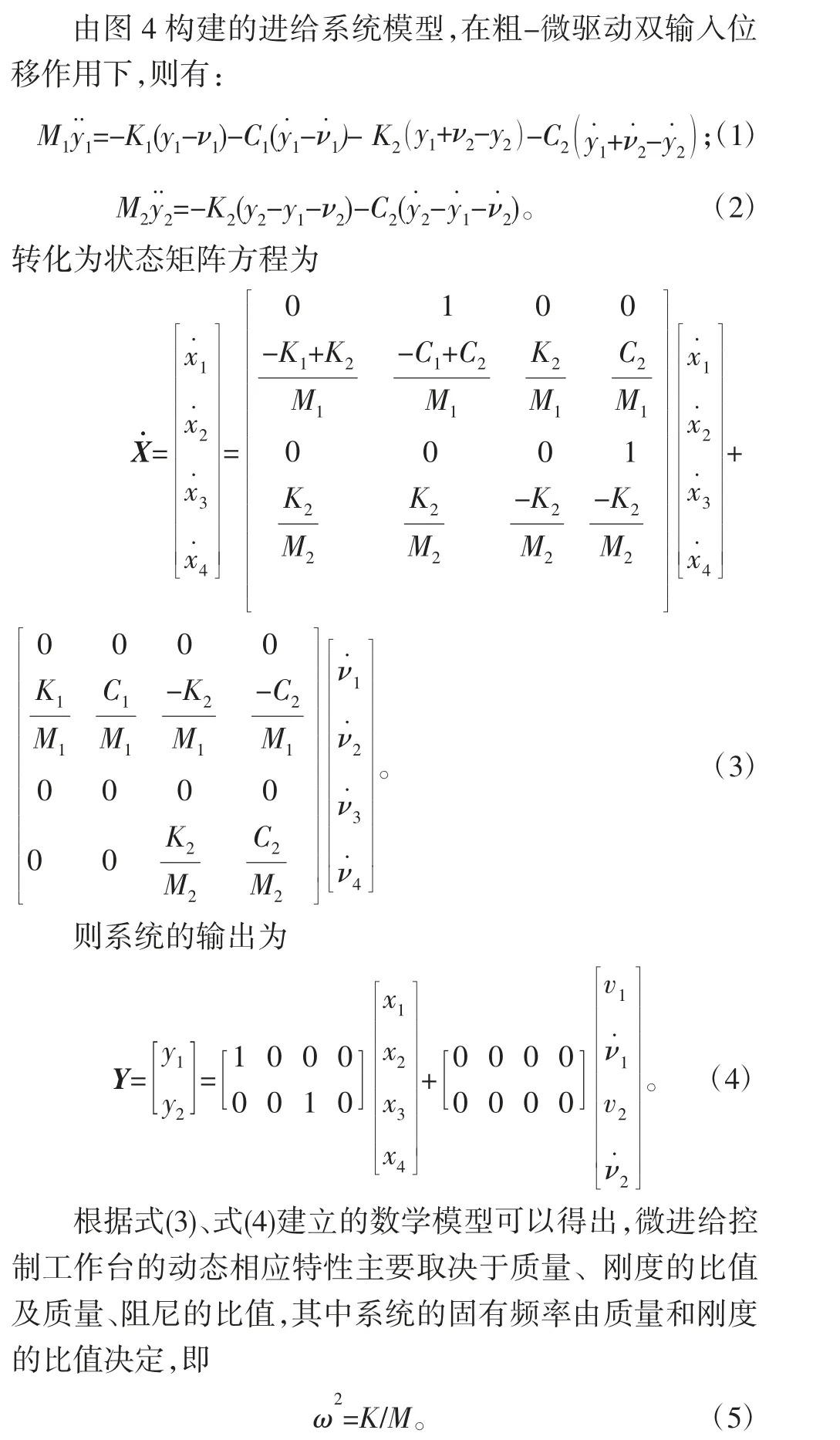
根據(jù)后續(xù)的檢測分析和以往經(jīng)驗數(shù)據(jù)分析表明,從粗微進給驅(qū)動位置精度保持性能等方面來看,模型分析推算得出當粗微工作臺特性參數(shù)基本相同時,系統(tǒng)的動態(tài)響應(yīng)和定位性能達到最佳狀態(tài),滿足了打標的質(zhì)量要求。
3 視覺檢測的LED圖像標定
設(shè)計選用深圳市迪奧科技有限公司的TEO黑白工業(yè)攝像機,該相機主要完成自動焊線機的打標頭的視覺引導(dǎo)和LED支架移動位置的檢測,CCD相機固定在打標平臺的上方。為了準備獲取微進給系統(tǒng)的運動距離與檢測圖像位置的關(guān)系,需要對相機進行匹配標定。
Sapera Processing 5是基于Windows R 的圖像處理和分析的高度優(yōu)化圖像庫,采用MMXTM, SSETM(Streaming SIMD Extensions) 及SSE2 進行優(yōu)化,由整套圖像處理分析功能模塊組成。Sapera Processing 5 圖像處理系統(tǒng)提供包括圖像數(shù)據(jù)處理、圖像數(shù)據(jù)搜索和各種條形碼解碼等工具箱數(shù)據(jù)庫調(diào)用[6],該設(shè)計基于迪奧科技的TEO工業(yè)相機和Sapera Processing 圖像處理軟件提供的函數(shù)庫來實現(xiàn)指定的功能,即初始化指定設(shè)備,提取感興趣區(qū)域(ROI區(qū)域),模板匹配找出對應(yīng)圖像位置。
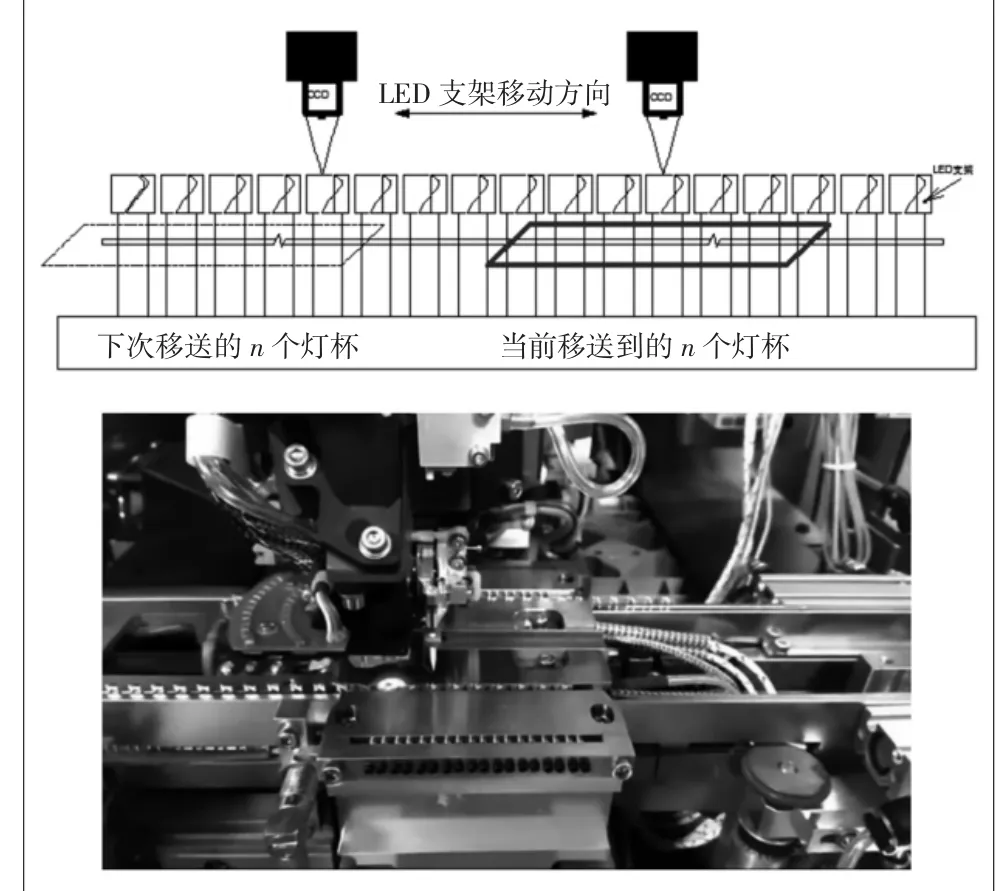
圖5 LED支架移送平臺
LED支架移送過程中,主要是依靠進給系統(tǒng)的移送定位精度來保證打標的質(zhì)量,特別是晶片位的聯(lián)排數(shù)量多且打標尺寸點比較小,所以對圖像定位誤差的檢測精度要求非常高,如圖3所示。具體設(shè)計的實施流程為:相機標定確定相機圖像位置與進給系統(tǒng)移動位置匹配關(guān)系后,先通過獲取當前CCD圖像中感興趣的LED支架燈杯位置坐標(Xold,0),然后控制系統(tǒng)驅(qū)動LED支架移動相應(yīng)的距離,這段距離包含粗位移和微調(diào)距離,到達目標位置后,再獲取位置坐標(Xnew,0)感興趣的X坐標值,最終根據(jù)相機標定匹配的對應(yīng)位置參數(shù),進而驗證實際進給控制系統(tǒng)的定位精度及定位誤差。
在實際的測試中,發(fā)現(xiàn)由于圖像在屏幕中的坐標與進給控制工作臺上的實際位置沒有固定的線性或者函數(shù)關(guān)系,并且又受機構(gòu)的機械結(jié)構(gòu)和工業(yè)相機安裝位置的影響,因此在不同的LED支架產(chǎn)品、不同工作臺和不同的相機安裝位等情況下存在不同的映射關(guān)系,必須對檢測系統(tǒng)進行坐標標定,找到具有映射匹配關(guān)系的數(shù)學(xué)參數(shù)模型,通過相機標定后,確定了屏幕上圖像位置的變化與工作臺距離的變化關(guān)系,當進給系統(tǒng)發(fā)出一定的指令脈沖后,移送工作臺推動LED支架移動一定距離與圖像模板相對也移動相應(yīng)的距離存在一個關(guān)系,也就是當量脈沖與圖像像素的關(guān)系[7-8]。由于在實際的設(shè)備制造和安裝中存在很多的不定因素,工作臺的實際坐標位置和圖像坐標位置關(guān)系的不一致,比如安裝出現(xiàn)角度偏差等形位誤差,所以通過移動進給機構(gòu)聯(lián)動操作決定相機標定的模型參數(shù)。為了建立工作臺位置與圖像上對應(yīng)像素位置關(guān)系,先假設(shè)為:工作臺的相對位置變化為(ΔU,0),圖像像素變化的相對位置關(guān)系為(ΔI,0),并且假定像素在移動過程中質(zhì)量良好且不發(fā)生失真,定義位置的變化都是相對統(tǒng)一的坐標參考點出發(fā)的,則有:

1)根據(jù)工作臺的移動,攝取支架移送圖像,將圖像的一個唯一特征區(qū)域標記為模板,并記錄當前的坐標相對于初始參考位置的坐標變化(LStart,0),并記錄下工作臺的當前位置坐標值(UStart,0)。
2)基于當前的(UStart,0)坐標位置,左右移動工作臺,移動的距離一致,并獲取移動前后的圖像。
3)進而獲取圖像上模板的位置,分別記錄下左右兩點相對參考原點的坐標位置(LLeft,0)和(LRight,0)。
4)同時記錄下工作臺的實際左右移動的位置坐標值(ULeft,0)和(URight,0)。
5)最后移動進給工作臺,如果只能找到一個且只有一個,則說明模板匹配成功。最終依據(jù)校準標定后的數(shù)據(jù),計算出左右移動相應(yīng)的像素和平臺變化值。

獲取的CCD圖像盡可能滿足人的肉眼視覺看圖方向,也就是盡量考慮CCD的內(nèi)參數(shù)和視角等因素的影響,保證視圖的偏差角與移動進給工作臺的方向一致,如果角度偏差過大的話,圖像模板匹配識別的響應(yīng)時間就會加長,檢測效率會下降。
由于設(shè)計的是單自由度工作臺,驅(qū)動LED支架的引導(dǎo)軌是直的且平行的,考慮安裝要求,即平行度比較高(理論絕對平行)。即:ΔUx=AΔIx是成立的。根據(jù)CCD相機標定的過程,記錄和得出具體的相關(guān)數(shù)據(jù)如表1所示,為了保證模型參數(shù)的有效性,獲取了多組數(shù)據(jù),以A的均值代替單次A的數(shù)據(jù),以減少由于工作臺等其他因素的影響所造成的系數(shù)A的變化,則有
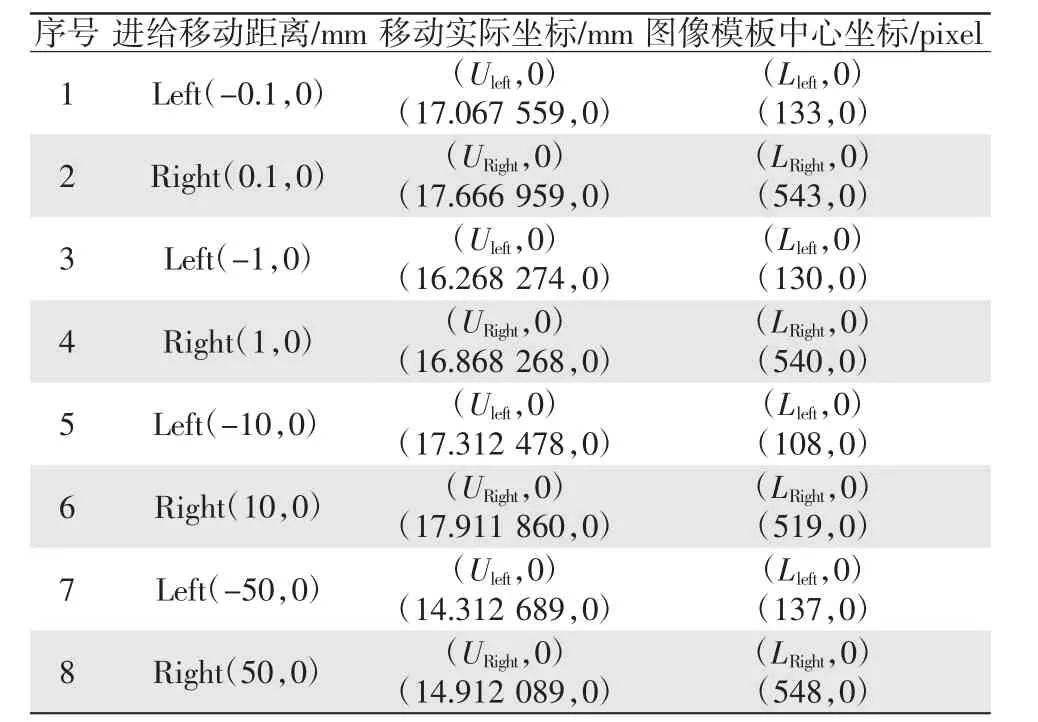
表1 進給移動位置與圖像像素對應(yīng)參數(shù)

在相機的模板標定時,確定系數(shù)A的相關(guān)特征參數(shù)的具體大小,因此,在實際的進給控制過程中,根據(jù)運行時獲取的圖像像素的相對坐標位置,推算出實際工作臺需要插補移動的位移,以達到實際的定位精度要求。
4 進給控制測試分析
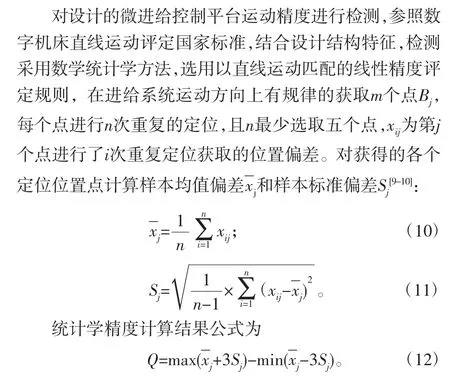
在實際的測試中,由于運動方向上工作的距離最多只有0.5 m,所以為了減少數(shù)據(jù)獲取和計算的工作量,總共選取3個具有代表性的點,且每個點進行5次重復(fù)的定位測試實驗,分別控制微進給機構(gòu)實現(xiàn)5 μm、1×103μm和5×104μm的三個區(qū)間內(nèi)進行視覺檢測反饋的閉環(huán)控制。最后獲得采樣周期為10 ms、輸出間隔為0.1 s、步距為0.1 μm的時間-位移曲線如圖6所示。
圖6 時間位移定位誤差曲線
采用式(10)~式(12)對測試數(shù)據(jù)進行統(tǒng)計學(xué)分析,得出了基于視覺反饋的粗微進給運動平臺各項運動精度指標,具體結(jié)果分析數(shù)據(jù)如表2所示,統(tǒng)計學(xué)計算分析獲得的定位精度為3.468×10-2μm。

表2 定位精度數(shù)據(jù)表 μm
5 結(jié) 語
從仿真和實驗研究的結(jié)果來看,仿真結(jié)果準確可靠,針對LED支架打標高精度和穩(wěn)定性要求,所建立的動力模型能夠比較準確地描述微進給系統(tǒng)的動力學(xué)特性。進行閉環(huán)控制實驗研究,在50 mm行程范圍內(nèi),實現(xiàn)步距為0.1 μm的微位移直線運動,定位精度達到3.468×10-2μm。系統(tǒng)能夠?qū)崿F(xiàn)較高的位移輸出精度,驗證了仿真分析結(jié)果的正確性,在實際打標應(yīng)用中也得到好評。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
模具制造(2019年3期)2019-06-06 02:10:54
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
