裁剪抓取式紅花采摘裝置的設計研究
2020-11-24 07:23:48白溢文李霞邵宇晴呂其峰楊袁浩
機械工程師 2020年11期
關鍵詞:模態
白溢文, 李霞, 邵宇晴, 呂其峰, 楊袁浩
(1.天津理工大學a.天津市先進機電系統設計與智能控制重點實驗室;b.機電工程國家級實驗教學示范中心,天津300384)
0 引 言
紅花是名貴中藥材和重要的油料作物,作為提取食用色素的原料,廣泛應用于食品、化妝品等行業[1]。近年來國內紅花產業在飛速發展,因此紅花花絲的機械化采收是勢在必行的[2]。
紅花種植在國內十分廣泛,隨著紅花產業的迅速發展,帶來的最突出問題就是采摘困難。紅花采摘期大約在每年的7-9月份,與其他農作物采摘期重疊,而且紅花對采摘時間的要求也很苛刻,過早或過晚采摘都會影響紅花的質量。由于紅花獨特的生長特性,花球分布較為復雜,導致采摘定位困難;紅花花絲和花籽的成熟時期不同,并且收獲花絲時不能損傷花球,導致機械化采摘困難,因此現在仍以人工采收為主[3-5]。這些因素導致了采摘費用逐年上升,已占到紅花田間生產總費用的30%~50%,甚至導致新疆等地出現雇工困難的情況,嚴重影響了農戶種植紅花的積極性。
針對紅花機械化采摘問題,中國、印度、意大利等國家進行了大量研究[6],現有已研發的紅花采摘機按工作原理主要可分為氣吸式、對輥式、梳夾式等,但都存在著能耗高、噪聲大、采凈率低等缺陷,在實際生產過程中使用效果并不是非常理想。為解決目前紅花采摘技術落后、勞動強度大、安全性較差等問題[7],通過幾何計算和三維建模的方法設計了一種裁剪抓取式紅花采摘末端執行器,來降低農作者的勞動強度。末端執行器擺脫了傳統的高壓氣流采摘方式,實現了無噪聲無污染作業,同時利用PLC搭建了與采摘裝置配套的自動控制系統。為驗證結構可行性和穩定性,對其進行了有限元分析,提前在理論上預測了其能否滿足紅花采摘的工作要求。
1 結構與原理
1.1 總體結構
裁剪抓取式末端執行器由驅動機構、托舉機構、裁剪抓取機構等組成,能夠有效地對紅花花球進行限位,避免花絲散亂分布,有效減少花絲采摘不完全現象的發生,如圖1所示。近年來,國外針對紅花花絲機械化采收問題的研究主要集中在氣力式采收方面[8],而該末端執行器擺脫了傳統使用高壓氣流對花絲進行采摘的方式,并且采摘過程中不存在花絲反復摩擦的現象,因此有效降低了紅花的破碎率,滿足了穩定性要求[9-10]。
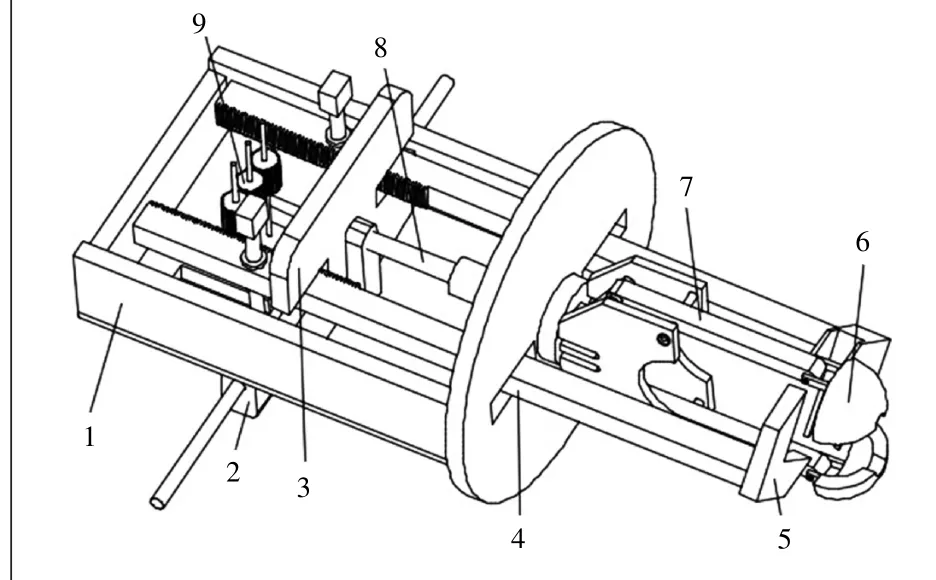
圖1 總體結構
1.2 工作原理
末端執行器驅動機構分為第一、第二、第三驅動機構,其中第一驅動機構控制托舉機構運動,第二、第三驅動機構控制裁剪抓取機構運動。工作時,末端執行器的第一驅動機構控制限位爪(由爪體和托舉碗組成)相對于支撐殼體運動,限位爪形成抓取通道從而對花莖和花球進行限位。限位爪上的托舉碗形成托舉紅花花球的半球形托舉腔,即每一個托舉碗的內表面均彎曲呈1/4球面,兩個托舉碗扣合形成半球形腔體。與此同時,裁剪抓取機構的兩個夾取爪起初為張開狀態,限位爪對花球和花莖進行限位后兩個相對設置的夾取爪在第二和第三驅動機構的驅動下對準花絲根部直接夾取花絲。其中一個夾取塊上設有切割花絲的刀片,當兩個夾取塊扣合后,一個夾取塊上的刀片與另一個夾取塊扣合實現對花絲的切割,瞬間實現花絲和花球的分離。由于夾取塊彎曲呈“V”形,兩個夾取塊扣合后中間位置能夠形成夾取通道,避免了切割花絲后花絲直接掉落。最后裁剪抓取機構釋放采摘下來的花絲,紅花花絲落入收集裝置。其工作流程如圖2所示,可以更好地說明機構的整體運行情況[11]。
2 關鍵結構設計
2.1 托舉機構的設計
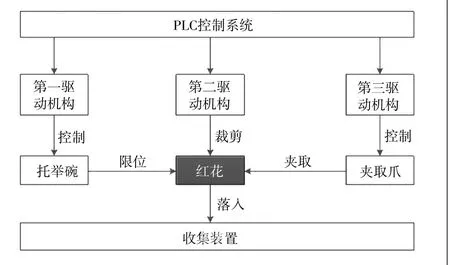
圖2 工作流程
托舉機構是末端執行器的關鍵結構之一,其對末端執行器能否成功采摘紅花花絲有著決定性的影響。托舉機構的主要作用是直接抓取花徑并通過托舉腔托舉紅花花球,有效地對花球進行限位,即使遇到較為惡劣的天氣(如大風天氣),限位爪也能夠保證花莖和花球是穩定的。托舉機構由支撐殼體、第一驅動機構及上述托舉碗活動連接的限位爪構成,托舉碗和限位爪均和第一驅動機構連接。第一驅動機構用于驅動限位爪相對于支撐殼體運動,以使限位爪形成用于抓取花莖的通道和用于托舉花球的托舉腔,如圖3所示。
2.2 裁剪抓取機構的設計
裁剪抓取機構是末端執行器的另一關鍵結構,其主要作用是準確地摘取下紅花花球上的花絲,并且采摘過程中不會產生很大的振動,且噪聲小。裁剪抓取機構由抓取機構、第二驅動機構和第三驅動機構組成,抓取機構包括兩個相對設置的夾取爪,第二驅動機構和兩個夾取爪連接來驅動夾取爪扣合夾取花絲,如圖4所示。
3 控制系統設計
采摘裝置所有功能的實現均需要通過控制系統,并且只有通過控制系統才可以真正實現采摘全過程的自動化。PLC 是工業自動化領域重要的控制器[12],其能夠通過數字或模擬式的輸入/輸出來控制各種類型的機械設備和生產過程。
根據紅花采摘裝置的運動和工作原理,考慮到實現對裝置的控制需要較為復雜的PLC系統,并且輸入/輸出信號較多,因此選用三菱FX3U-32MT型號的PLC。采摘裝置控制系統具體的I/O分配如表1所示。
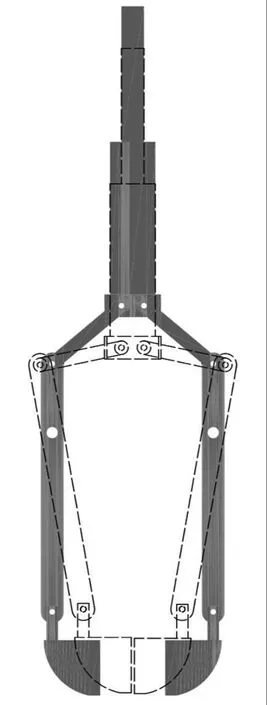
圖3 托舉機構
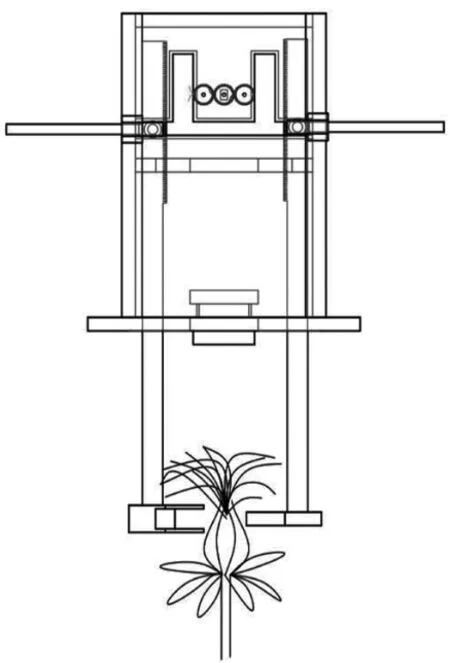
圖4 裁剪抓取機構
采摘裝置共有3個驅動機構,因此需要3個伺服驅動器來實現裝置驅動。考慮到農業機械的經濟性、可靠性的需求[13],第一、第二、第三驅動機構均采用松下MBDKT2510CA1型伺服驅動器,該伺服驅動器為松下A5Ⅱ系列伺服驅動器,操作簡單方便且具有很好的兼容性,接線圖如圖5所示。
4 托舉碗傾角計算
裝置托舉碗的作用是固定紅花花球位置,將花球包裹在其形成的托舉腔內。托舉腔前端存在圓柱孔洞,其作用是形成紅花花莖的的通道,避免托舉花球時將花莖損傷。
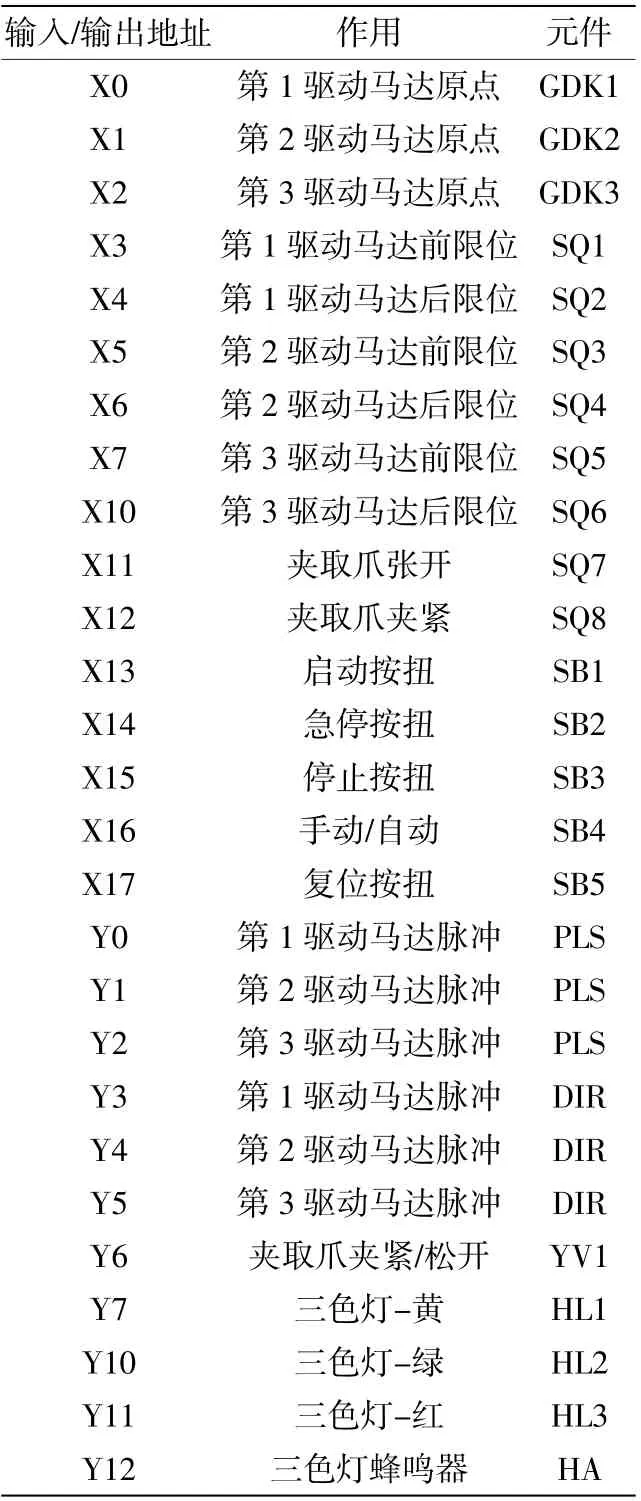
表1 I/O分配表
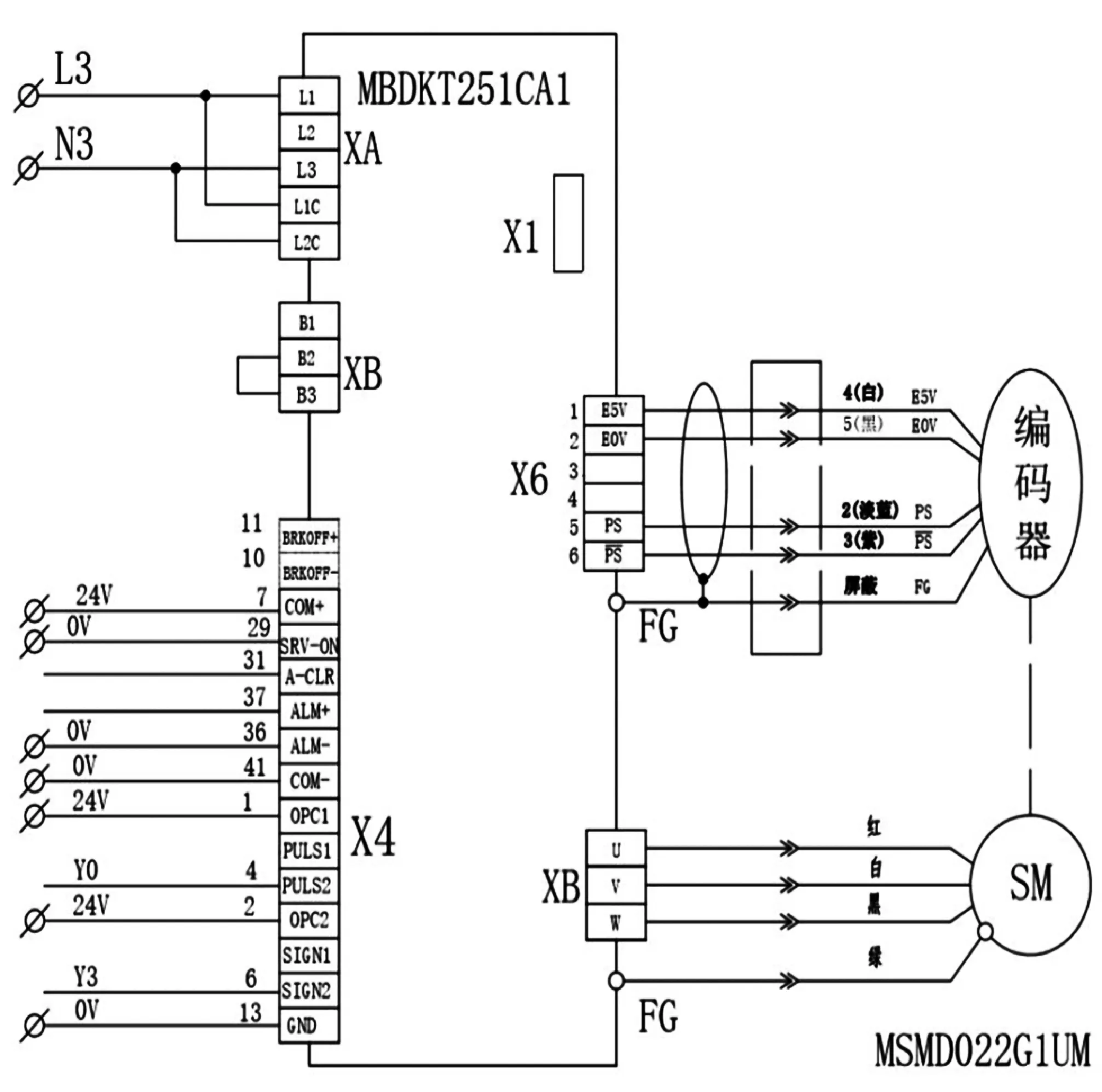
圖5 伺服驅動器接線圖
托舉紅花花球時,要保證采摘裝置的兩個球形托舉碗相互扣合從而形成閉合的半球托舉腔。因此,需要對托舉碗相對于爪體的傾角大小進行幾何關系計算。具體在工作中,首先第一驅動機構通過氣壓(液壓)等方式驅動動力組件向前方運動,動力組件隨之帶動傳動組件運動。左右兩端的傳動組件與豎直方向的夾角發生改變,裝置前端兩個球形托舉碗形成閉合托舉腔。托舉碗閉合前爪體處于水平位置,具體如圖6所示。
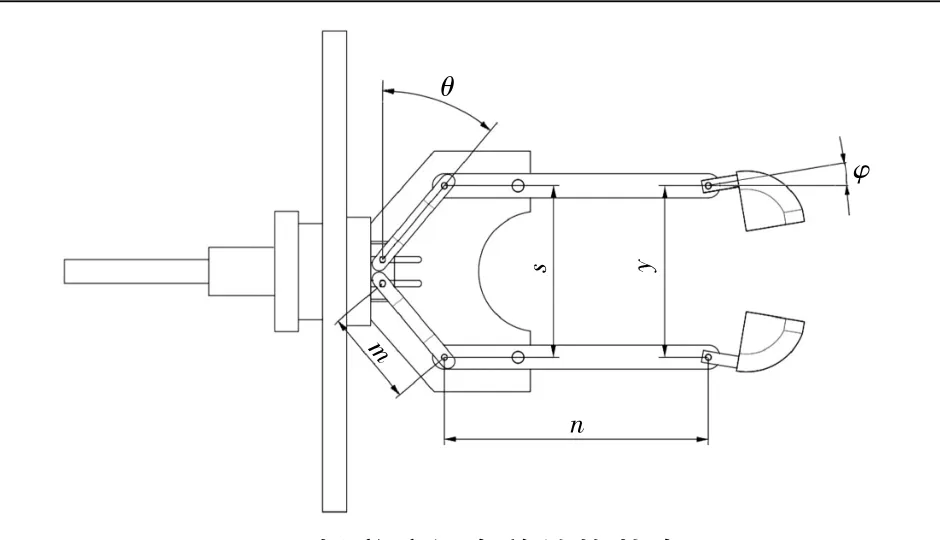
圖6 托舉碗閉合前結構狀態
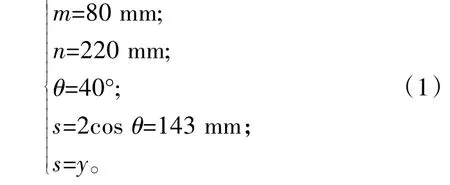
設傳動組件兩端圓心距離為m,爪體兩端圓心距離為n,傳動組件與豎直方向夾角為θ,左右兩端傳動組件圓心距離為s,左右兩端托舉碗圓心距離為y,托舉碗與水平方向的夾角為φ。根據結構的設計尺寸和幾何關系可確定:
托舉碗閉合后,爪體不再處于水平位置,具體如圖7所示。
圖7 托舉碗閉合后結構狀態
傳動組件與豎直方向夾角變為θ′,左右兩端傳動組件圓心距離為s′,左右兩端托舉碗圓心距離為y′, 此時s′與y′不再相等,但托舉碗與水平方向的夾角仍為φ不變,根據結構的設計尺寸和幾何關系可確定:
5 采摘裝置有限元分析
ANSYS軟件主要用來進行熱、電磁、靜力學及流體等方面的分析,在工程上得到了廣泛的應用和推廣,尤其是在復雜工程問題的計算和分析方面[14]。通過Cero軟件設計出紅花采摘裝置的三維模型,將其導入到ANSYS SCDM中進行檢測和修復。修復完成后通過軟件內部接口直接將模型導入到Workbench模塊中。首先對采摘裝置整體結構進行靜力學分析,目的是檢驗該裝置在理論上是否滿足實際生產中強度和剛度的需求[15]。然后對裝置的關鍵結構——托舉機構進行模態分析,以確定在工作頻率下是否會產生共振現象。
5.1 建立有限元模型
第一步先定義裝置的材料,考慮到在實際紅花采摘過程中的外部環境,末端執行器的材料應該具有較高的強度和耐磨性,因此材料選擇45鋼。接下來對裝置進行網格劃分,采用自由生成網格的方式進行劃分[16],因為末端執行器結構模型不是很規則,所以在進行網格劃分時選擇四面體形式的網格進行劃分。
5.2 靜力學分析結果
根據位移云圖的觀測,末端執行器最大位移為0.180 86 mm,出現在其頂端位置,如圖8(a)所示;根據結構應力云圖的觀測,末端執行器最大應力為17.186 MPa,出現在其中間連接位置,如圖8(b)所示;根據結構應變云圖的觀測,末端執行器最大應變 為8.9771 ×10-5,也出現在其中間連接位置,如圖8 (c) 所示。
5.3 模態分析
圖8 靜力學分析求解結果
托舉機構是采摘裝置的關鍵結構之一,由于機構末端的動力組件直接接觸氣壓或液壓機構,并且該機構的托舉碗限位紅花花球也是整個采摘裝置運行的第一步。托舉機構的穩定性至關重要,直接影響著裝置能否成功采摘花絲,因此對該結構進行模態分析,以確定其是否能夠穩定工作。根據模態分析結果可以確定托舉機構的固有頻率和振型特征,機構前6階模態振型和模態頻率如圖9所示。
圖9 托舉機構前6階振型
由模態振型可知,托舉機構的前6階振型頻率均很小。托舉機構工作頻率在0.1~0.2 Hz左右,遠大于振型頻率,因此工作時不會發生共振現象。具體各階振幅和振型特征如表2所示。
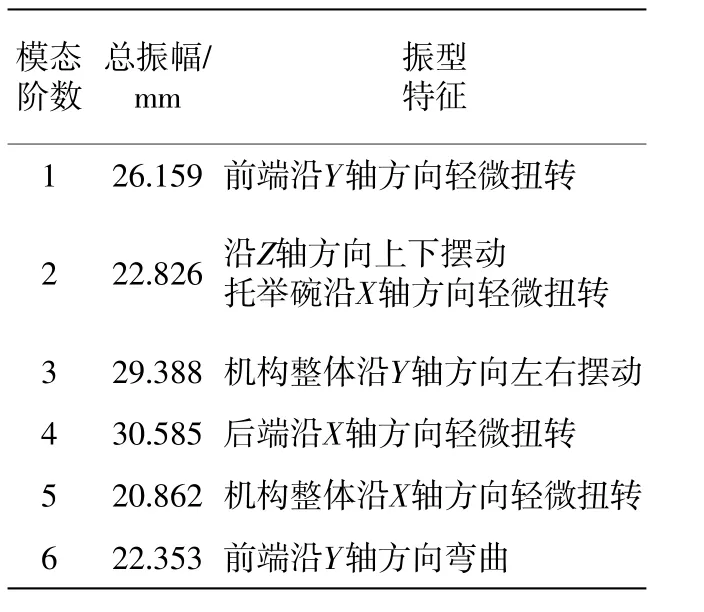
表2 前6階模態分析
6 結 論
1)設計了一種裁剪抓取式紅花采摘裝置,根據幾何關系計算出結構傾角,同時設計出配套的PLC控制系統,提高了農業機械自動化水平。
2)通過靜力學分析,裝置結構最大位移發生在頂端位置,與實際情況相符。整體結構應力、應變數值均較小,說明裝置能夠穩定運行,不會發生破壞。
3)通過模態分析,獲得了托舉機構前6階振型,機構的各階振型固有頻率遠小于工作頻率,不會產生共振現象。
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36
