基于時滯反饋控制的1/4車輛模型乘客減振研究
2020-11-24 08:21:10吳凱偉任傳波曹軍帥孫志釧
科學(xué)技術(shù)與工程 2020年29期
吳凱偉, 任傳波, 呂 浩, 曹軍帥, 孫志釧
(山東理工大學(xué)交通與車輛工程學(xué)院, 淄博 255000)
汽車長時間行駛在不平坦的路面時引起的垂直方向的振動會損傷汽車的零部件,同時這種狀況會給乘客帶來嚴(yán)重的健康問題[1],懸架系統(tǒng)的設(shè)計、開發(fā)和控制算法的應(yīng)用都是為了實現(xiàn)乘客乘坐舒適性和車輛平順性。與被動懸架相比,主動懸架有實時改變阻尼的特性讓懸架系統(tǒng)時刻處于最佳的阻尼力[2-3],但是隨著主動控制技術(shù)的應(yīng)用,不論是什么樣的控制問題,都要通過傳感器采集信號,控制器分析信號并對作動器發(fā)出指令實現(xiàn)控制,在這些過程中難免會產(chǎn)生“時滯”,在控制系統(tǒng)中時滯已經(jīng)成為不可避免的問題。
現(xiàn)運用時滯反饋控制理論,提出時滯反饋控制在3自由度1/4車模型中乘客減振中研究,通過異步學(xué)習(xí)因子粒子群算法確定反饋增益和時滯量,并提出頻域掃描法對時滯反饋參數(shù)進行穩(wěn)定性分析,通過建立被動懸架和含時滯的主動懸架模型進行模擬仿真,驗證含時滯反饋控制的主動懸架系統(tǒng)在提高乘坐舒適性和行駛平順性方面的效果。
1 1/4車輛主動懸架模型的建立
圖1所示含時滯反饋控制的1/4車輛主動懸架模型,設(shè)計的該車輛模型有3個自由度,具有所研究問題的所有基本特性。該結(jié)構(gòu)的部件包括乘客質(zhì)量、車身質(zhì)量和車輪質(zhì)量。該1/4車輛模型主要用于主動懸架和被動懸架系統(tǒng)的性能評估。車輛懸架模型參數(shù)如表1所示。
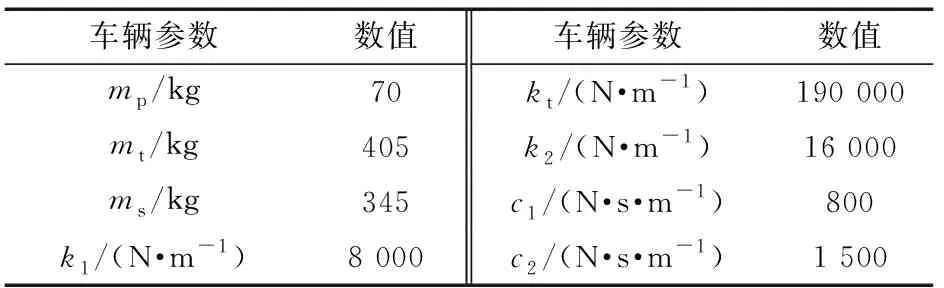
表1 車輛懸架模型參數(shù)Table 1 Vehicle suspension model parameters
根據(jù)拉格朗日法對1/4車輛模型列動態(tài)方程:

(1)
k2(x2-x3)+fr=0
(2)

(3)
式中:fr=gx3(t-τ),g和τ分別表示反饋增益和時滯量;t為時間。
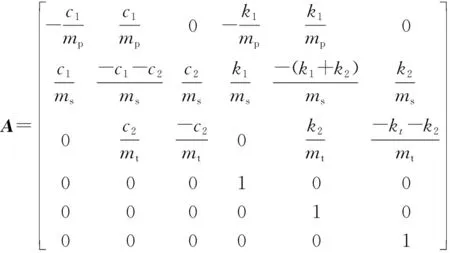
1.1 系統(tǒng)控制模型的建立
根據(jù)車輛的懸架性能指標(biāo)和乘客舒適性性能指標(biāo),選取狀態(tài)變量定義以下狀態(tài)空間方程:
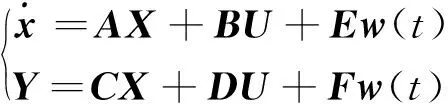
(4)
1.2 優(yōu)化目標(biāo)函數(shù)的建立
為提高乘客舒適性和汽車平順性,使用新的建立目標(biāo)函數(shù)的方法,通過對式(1)~式(3)求解,得到系統(tǒng)各時間點的動力響應(yīng)為
(5)
將各個時間點的動力響應(yīng)代入式(1)~式(3)得:
(6)
求得乘客座椅、車身、輪胎在各個時間點對應(yīng)的加速度,以此在優(yōu)化的過程中可以得到不同時間點的優(yōu)化結(jié)果,即最大程度上使目標(biāo)函數(shù)最小化。
以車身加速度均方根、乘客加速度均方根、車身速度均方根加權(quán)作為優(yōu)化目標(biāo)評價函數(shù)J,以最大限度地提高乘客的舒適性和汽車的平順性。

(7)
1.3 時滯參數(shù)確定
粒子群優(yōu)化算法(particle swarm optimization, POS)[16]是一種進化計算技術(shù)(evolutionary computation),源于對鳥群捕食的行為研究。PSO算法是一種基于迭代的優(yōu)化工具。系統(tǒng)初始化為一組隨機解,通過迭代搜尋最優(yōu)值,粒子間具有信息共享機制,gbest(粒子群經(jīng)歷過的最優(yōu)位置)或pbest(粒子本身經(jīng)歷過的最優(yōu)位置)將信息傳遞給其他粒子,相向流動,搜索跟新跟隨最優(yōu)解,收斂速度快。根據(jù)目標(biāo)函數(shù)的特點,使用具有異步變化學(xué)習(xí)因子的粒子群算法。
1.3.1 算法原理
學(xué)習(xí)因子在優(yōu)化過程中隨時間的變化而變化,這樣使得在優(yōu)化的初期,粒子具有較大的自我學(xué)習(xí)能力和較小的社會學(xué)習(xí)能力,加強全局搜索能力,在優(yōu)化后期,粒子具有較大的社會學(xué)習(xí)能力和較小的自我學(xué)習(xí)能力,有利于收斂到全局最優(yōu)解。學(xué)習(xí)因子的變化公式為

(8)
式(8)中:c1,ini、c2,ini分別代表c1、c2的初始值;c1,fni、c2,fni分別代表c1、c2的迭代終值。
1.3.2 異步學(xué)習(xí)因子粒子群算法的基本步驟
(1)隨機初始化種群中各微粒的位置和速度。
(2)評價每個微粒的適應(yīng)度,將當(dāng)前各微粒的位置和適應(yīng)度儲存在各微粒的pbest中,將所有pbest中適應(yīng)最優(yōu)個體的位置和適應(yīng)存儲于gbest中。
(3)用式(9)更新粒子的速度和位移。
(9)
(4)更新學(xué)習(xí)因子[式(8)]。
(5)對每個微粒,將其適應(yīng)值與其經(jīng)歷過的最好位置做比較,如果較好,則將其作為當(dāng)前的最好位置,比較當(dāng)前所有phest和gbest的值,更新gbest。
(6)若滿足停止條件,搜索停止,輸出結(jié)果;否則返回(3)繼續(xù)搜索。在優(yōu)化過程中,取粒子數(shù)60,c1,fin取0.5,c1,ini取2.5,c2,fin取2.5,c2,ini取0.5,慣性權(quán)重取0.9,迭代步數(shù)取150次,分別得到簡諧激勵和隨機激勵下的最優(yōu)控制參數(shù):g1=18 815 N/m,τ1=0.868 0 s,g2=-32 609 N/m,τ2=0.993 0 s。適應(yīng)度函數(shù)迭代優(yōu)化的變化如圖2所示。
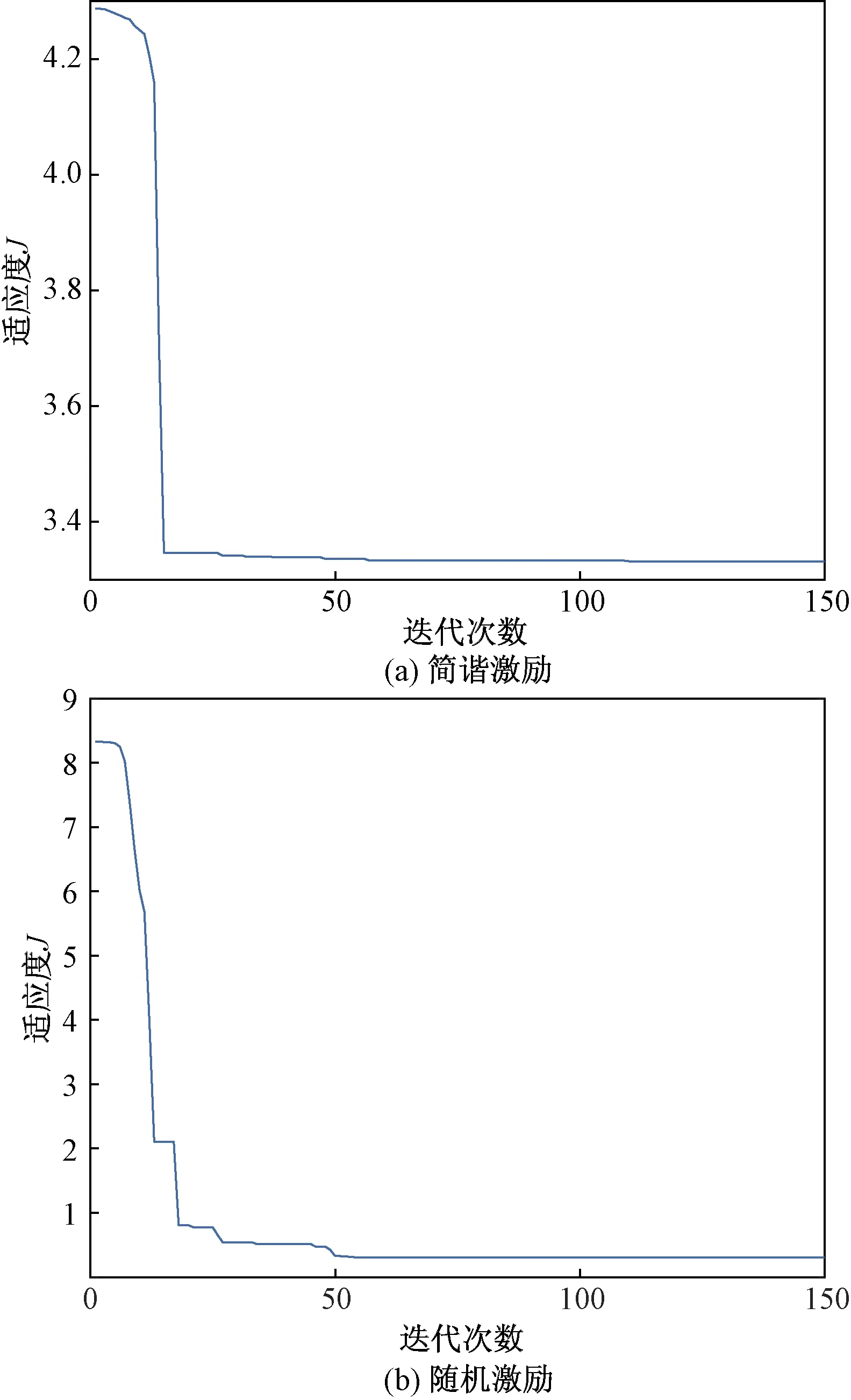
圖2 適應(yīng)度函數(shù)變化Fig.2 Variation of fitness function
2 穩(wěn)定性分析
時滯反饋控制系統(tǒng)的穩(wěn)定性分析非常重要,為了確保控制系統(tǒng)的穩(wěn)定,選用頻域掃描法對系統(tǒng)進行穩(wěn)定性分析[17]。
首先把式(1)~式(3)改寫為時滯方程的一般形式:

(10)

由式(10)可得系統(tǒng)的特征方程為
det(sI-A-Be-τs)=0
(11)
s和z的特征方程具體形式為

(12)
式(12)中:a0=c6s6+c5s5+c4s4+c3s3+c2s2+c1s1+c0;a1=c4s4+c3s3+c2s2+c1s1+c0;z=e-τs;c為特征方程的常系數(shù)。
進一步,在式子中a0和a1存在連續(xù)的多項式Gl(s)(l=1,2,…,n)滿足狀態(tài)方程并可等價為
CE(s,z)=a1[z+Gl(s)]a0=
k=0,1
(13)
式(13)中:Gl(s)滿足:

(14)
由于s和z為復(fù)數(shù),CE(s,z)=0時,多項式z+Gl(s)為0。
通過頻域掃描基本定理對優(yōu)化出簡諧激勵下的時滯參數(shù)g1=18 815 N/m,τ1=0.868 0 s進行穩(wěn)定性分析。當(dāng)時滯等于零時方程的特征根為(-4.385 3×105+4.608 1×105i),則特征方程的所有特征根均位于復(fù)平面的左半開面,即方程沒有非負(fù)實部的特征根,則控制系統(tǒng)是穩(wěn)定的。當(dāng)時滯不為0時通過頻域掃描法確定z1的模與頻率的關(guān)系找到交叉頻率,圖3(a)系統(tǒng)的交叉頻率為w1=6.338 3,將s=6.338 3 i代入特征方程得(-0.835 2-0.550 0i),這樣就可以得到w1對應(yīng)的時3.141 6+2rπ/6.338 3,r=0,1,…,。由于時滯為零時系統(tǒng)是穩(wěn)定的,即這個系統(tǒng)τ1∈(0,3.141 6)時是漸近穩(wěn)定的。
進行頻域掃描法分析得到了z2的模與頻率的關(guān)系,如圖3(b)所示,求得交叉頻率w2=19.646 5,即時滯的穩(wěn)定區(qū)間τ2∈(0,4.893 7)。
圖3 特征方程中z1、z2的模Fig.3 Modulus of z1,z2 in the characteristic equation
3 仿真結(jié)果分析
3.1 簡諧激勵下的仿真分析
將通過異步學(xué)習(xí)因子粒子群算法優(yōu)化出來的時滯參數(shù)代入式(1)~式(3)中,對簡諧激勵xgf=0.05sin(6.6t)作用下乘客和車身振動響應(yīng)進行仿真,分析1/4車模型在被動懸架系統(tǒng)和含時滯反饋的主動懸架系統(tǒng)在時域狀態(tài)下的振動響應(yīng)特性,其仿真結(jié)果如圖4所示。
圖4 簡諧激勵下仿真對比Fig.4 Simulation comparison under harmonic excitation
從圖4的仿真結(jié)果以及經(jīng)過20 s的時域計算得到的乘客舒適性和車輛平順性的評價指標(biāo)的均方根如表2所示,與被動懸架相比,根據(jù)圖4(a)、圖4(b)得出含時滯反饋的主動懸架車身加速度和乘客加速度的均方根分別從2.470 6、3.190 1減小到0.324 6、0.423 3,減小比例為86.70%、86.73%;圖4(c)車身速度的均方根值從0.565 0減小到0.061 3,減小比例為89.15%,圖4(d)乘客速度的均方根從0.420 9減小到0.018 2,減小比例為88.55%,圖4(e)車身位移的均方根從0.057 1減小到0.008 9,減小比例為84.41%,圖4(f)乘客位移的均方根從0.073 6減小到0.011 0,減小比例為85.05%。
表2 平順性指標(biāo)均方根值Table 2 Roughness index root mean square value
車身加速度和乘客加速度是衡量車輛平順性和乘坐舒適性的重要指標(biāo),當(dāng)外界激勵頻率等于系統(tǒng)固有頻率時,時滯反饋控制系統(tǒng)可以完全消除系統(tǒng)的振動,從仿真結(jié)果可見,在簡諧激勵下,含時滯反饋控制的主動懸架明顯地吸收了外界對系統(tǒng)的振動,使乘客舒適性和汽車平順性得到明顯的提升。
3.2 隨機激勵下仿真分析
為進一步研究含有時滯反饋控制的主動懸架的減振效果,模擬車輛以20 m/s速度行駛,某汽車懸掛系統(tǒng)的參數(shù)如表1所示,對1/4車模型在路面激勵下振動響應(yīng)進行仿真。仿真結(jié)果有助于分析含時滯反饋控制的主動懸架在汽車平順性和乘客舒適性的性能。
現(xiàn)實生活中,路面表現(xiàn)出隨機性,具有不可預(yù)測的不平度分布,路面激勵對車輛的動態(tài)響應(yīng)及乘客的乘坐舒適性有強烈影響,即選取路面激勵作為對輪軸的垂向擾動。在這里采用正弦函數(shù)疊加的方法建立路面的時域模型,圖5顯示了相應(yīng)的擬合模型,隨機路面由下列數(shù)學(xué)方程生成:
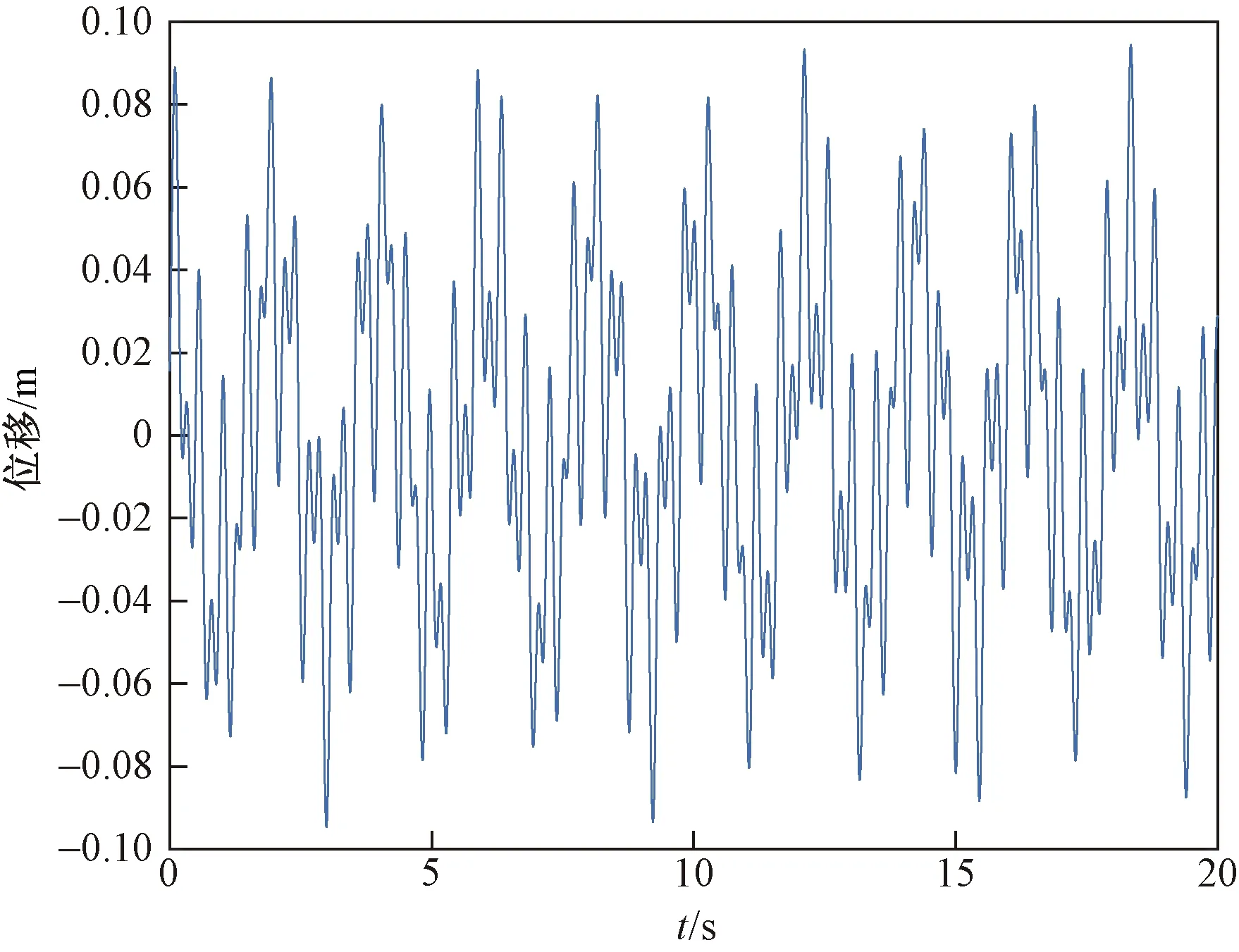
圖5 路面激勵的時域模型Fig.5 Time-domain model of road excitation
(18)
式(18)中:φ為幅值;ω為等效頻率;θ為(0,2π)上隨機分布的數(shù)值。
同樣將優(yōu)化出的時滯參數(shù)代入到式(1)~式(3)中,在路面激勵下時域的仿真結(jié)果如圖6所示。
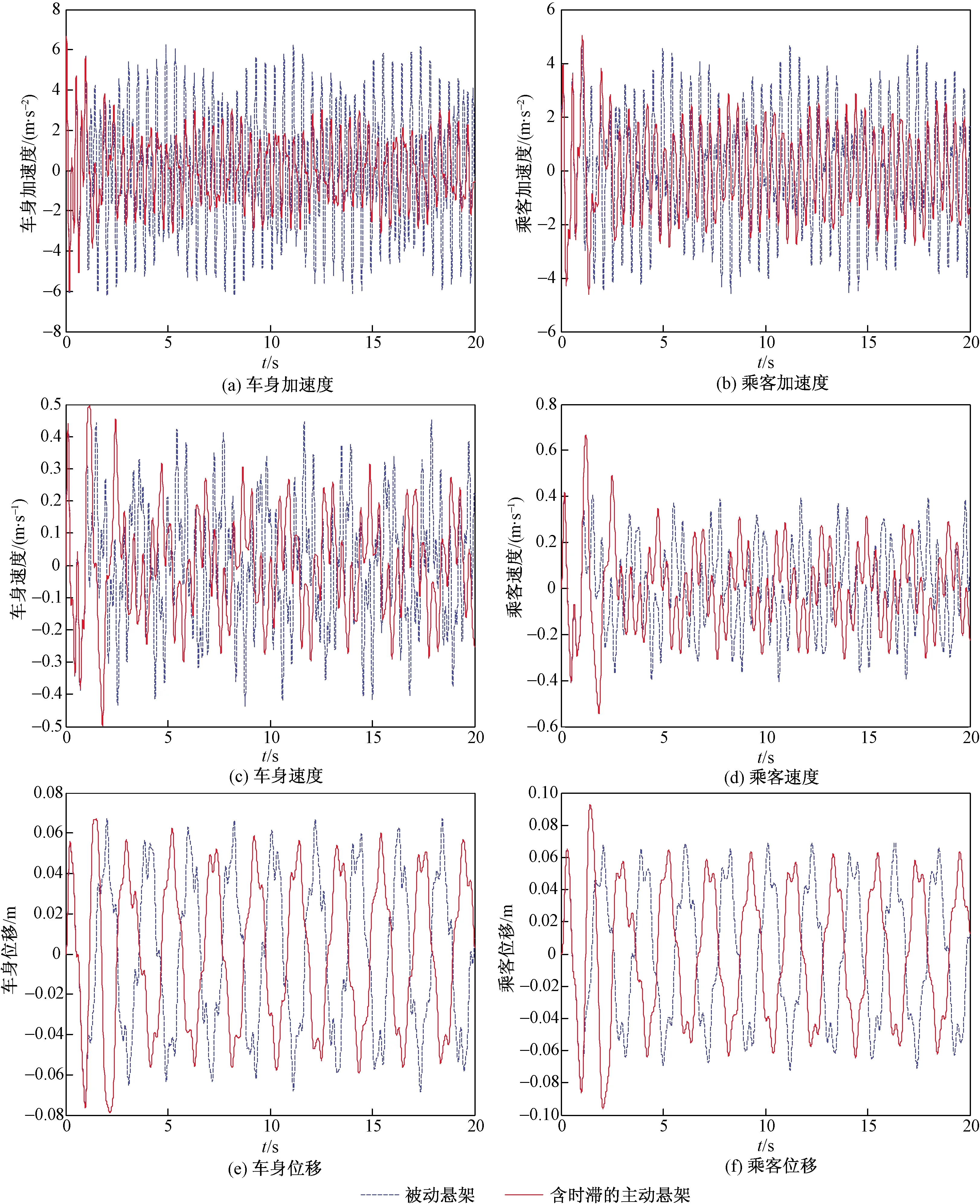
圖6 路面激勵下仿真對比Fig.6 Simulation comparison under road excitation
從圖6路面激勵的仿真圖及表3的平順性指標(biāo)可以得出,與被動懸架相比,根據(jù)圖6(a)得出出含時滯反饋控制的主動懸架車身加速度均方根從1.893 7降到1.096 6,減小比例為42.09%,圖6(b)乘客加速度均方根從1.465 0降到1.107 3,減小比例為24.42%,圖6(c)車身速度均方根從0.038 5降到0.035 9,減小比例為6.75%,圖6(d)乘客速度均方根從0.041 8降到0.039 0,減小比例為6.70%,圖6(e)車身位移均方根從0.127 4降到0.107 1,減小比例為15.93%,圖6(f)乘客位移均方根從0.120 6降到0.112 5,減小比例為6.72%。
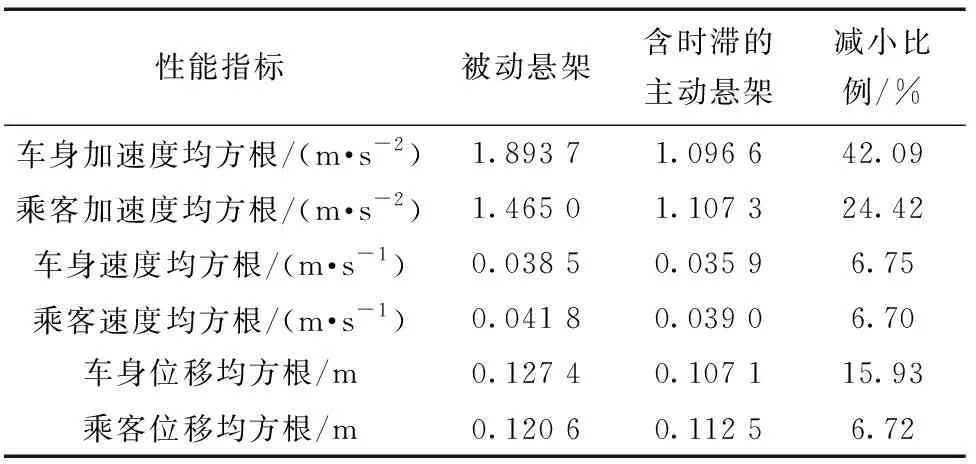
表3 平順性指標(biāo)均方根值Table 3 Roughness index rms value
在路面激勵下,根據(jù)仿真結(jié)果車身和乘客加速度同樣有明顯的降低,車身和乘客的速度、位移也得到了不同程度的下降,提高了乘坐的舒適性和車輛平順性,驗證了含時滯反饋控制的主動懸架在路面激勵下同樣有較好的減振效果。
4 結(jié)論
將時滯反饋控制應(yīng)用到1/4車乘客減振中,通過仿真分析得到以下結(jié)論。
(1) 針對3自由度車輛主動懸架系統(tǒng),將優(yōu)化變量各個時間點處動力響應(yīng)的均方根值加權(quán)作為優(yōu)化目標(biāo)函數(shù),并提出了頻域掃描法確定穩(wěn)定區(qū)間。
(2) 對于時滯參數(shù)的優(yōu)化建立了異步學(xué)習(xí)因子粒子群算法,然后運用頻域掃描法確保系統(tǒng)的穩(wěn)定性。仿真結(jié)果表明,無論在簡諧激勵還是路面激勵下,乘客的加速度和車身加速度都得到了明顯的降低,振動得到明顯的抑制,達(dá)到了預(yù)期的效果。
因此,含時滯反饋控制的主動懸架減振效果明顯,對改善乘客的乘坐體驗和車輛行駛期間平順性有很大的幫助。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
