某反無人機雷達伺服系統設計
2020-11-23 04:48:04吳影生
無線互聯科技 2020年17期
關鍵詞:設計
宣 翔,吳影生
(中國電子科技集團公司第三十八研究所,安徽 合肥 230088)
0 引言
隨著現代戰爭朝著信息戰、電子戰的方向不斷發展,無人機逐步取代有人駕駛飛機,在戰場上廣泛應用于偵察監視、電子干擾、對地攻擊、反導攔截等方面。無人機具有飛行速度快、體積小、雷達難以追蹤等特點[1]。反無人機雷達具有實時偵察和定位敵方無人機,并為打擊無人機武器提供制導的功能,為解決無人機飛行速度快等難題,反無人機雷達對伺服系統的響應速度和跟蹤精度提出了更高的要求。
本研究的雷達伺服系統是反無人機雷達跟蹤無人機的基礎,通過對雷達伺服系統驅動能力、雙伺服電機精度的補償以及伺服軟件等一系列設計來滿足反無人機雷達快速伺服響應和高跟蹤精度等功能要求。
1 雷達伺服系統設計
雷達伺服系統包括:轉臺、驅動系統、減速機、控制系統、編碼器和供電系統等,簡化的數學模型如圖1所示。
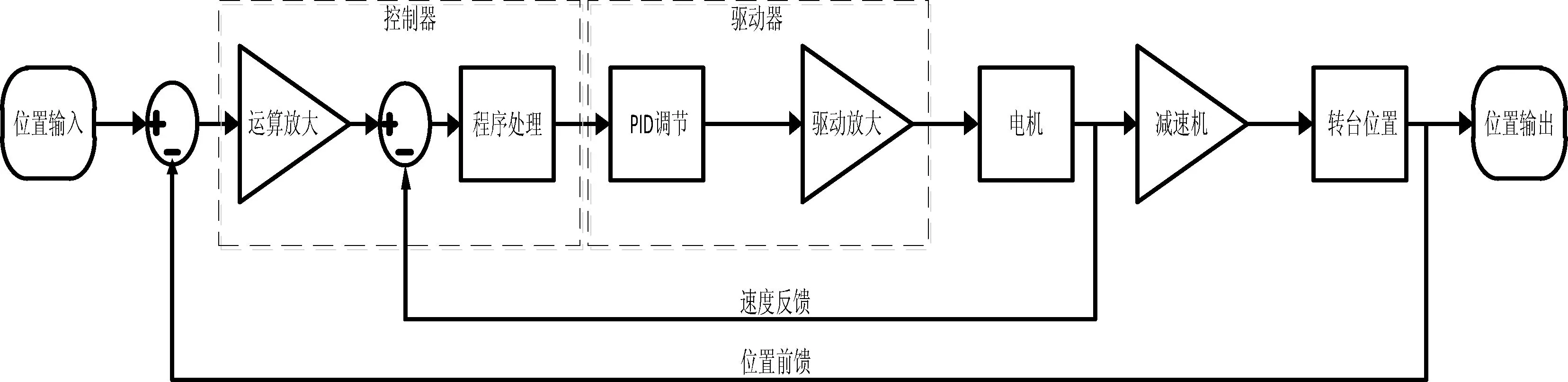
圖1 雷達伺服系統數學模型
驅動系統由兩套電機和驅動器組成,兩套驅動器分別驅動兩套電機,兩套電機分別通過角度編碼器向兩套驅動器反饋位置信息。兩套電機分別驅動減速機里的兩套小齒輪減速機構,從而實現共同驅動轉臺的功能。驅動器之間通過串行外設接口(Serial Peripheral Interface,SPI)協議實時進行交互,伺服系統通過控制器只需要向其中一臺主驅動器下達指令,另一臺從驅動器實時接收信號并完成相應任務。控制器通過控制器局域網絡(Controller Area Network,CAN)總線的方式與驅動器進行交互,同時通過RS422串口信號接收指令系統下達的指令。雷達伺服系統的設計如圖2所示。
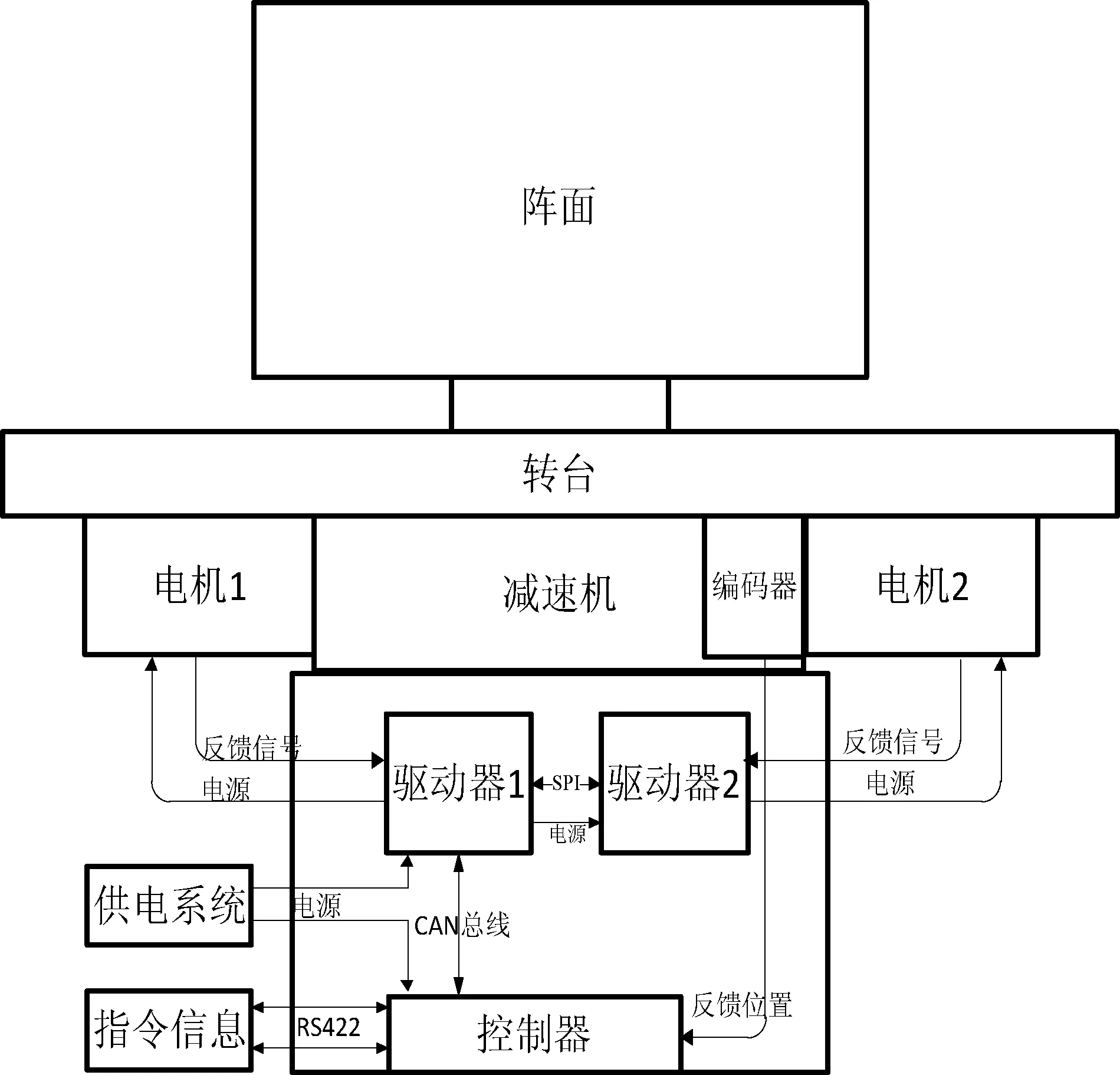
圖2 雷達伺服系統設計框圖
2 雙電機消隙設計
2.1 機械電氣設計
雙電機驅動消除間隙,即用相同的兩臺電機分別帶動兩套完全相同的減速機構,再由兩減速機構的輸出小齒輪帶動主機構的大齒輪轉動;電機通過消隙控制軌跡曲線運行,使大齒輪在啟動和換向過程中始終受到偏置力矩的作用,兩個輸出小齒輪分別貼在大齒輪兩個相反的嚙合面,使大齒輪不能在齒輪間隙中來回擺動,不會出現兩臺電機同時對被拖動的大齒輪或者齒輪軸的輸出扭矩為零的現象(見圖3—4),從而消除間隙,達到提高系統精度的目的[1]。
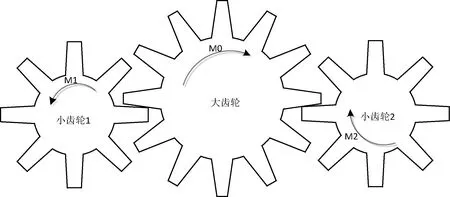
圖3 雙電機消隙示意

圖4 雙電機消隙工作示意
相對于傳統的單電機方位驅動,雙電機消隙在性能上具有以下幾個方面的優勢。(1)更高的重復定位精度。運用雙電機消隙這種電氣方式代替傳統復雜的機械傳動方式,降低了復雜性,不需要進行機械維護,重復性更高。(2)更靈活的控制方式。雙電機既可以反向驅動消除齒輪間隙,又可以同向驅動加大力矩。(3)更低廉的運行成本。機械結構更簡單,設計和維護成本更低。
2.2 動態偏執力矩
在雷達天線啟動過程中,兩個電機提供大小相等、方向相反的力矩,形成偏置力矩,使兩個小齒輪分別貼緊大齒輪的兩個相反的嚙合面,大齒輪不能在齒輪的間隙擺動[2],隨著一個小齒輪輸出力矩的增大,另一個小齒輪力矩減小到0后(見圖5,對應C、C′),換向并逐漸增大輸出力矩,這樣帶動主齒輪轉動達到平穩的工作狀態;在換向的過程中,兩個電機的工作狀況不同:一個電機維持平穩的轉動狀態,另一個電機提前改變力矩方向,使該電機驅動的小齒輪貼向大齒輪的另一個嚙合面,再次形成偏置力矩,又回到啟動時的偏置力矩狀態,該力矩逐步增大,然后由提前反向的電機帶動主齒輪轉動,另一個電機才逐步反向,直到和前一個電機共同負擔負載轉矩,從而又使雷達天線達到平穩狀態。
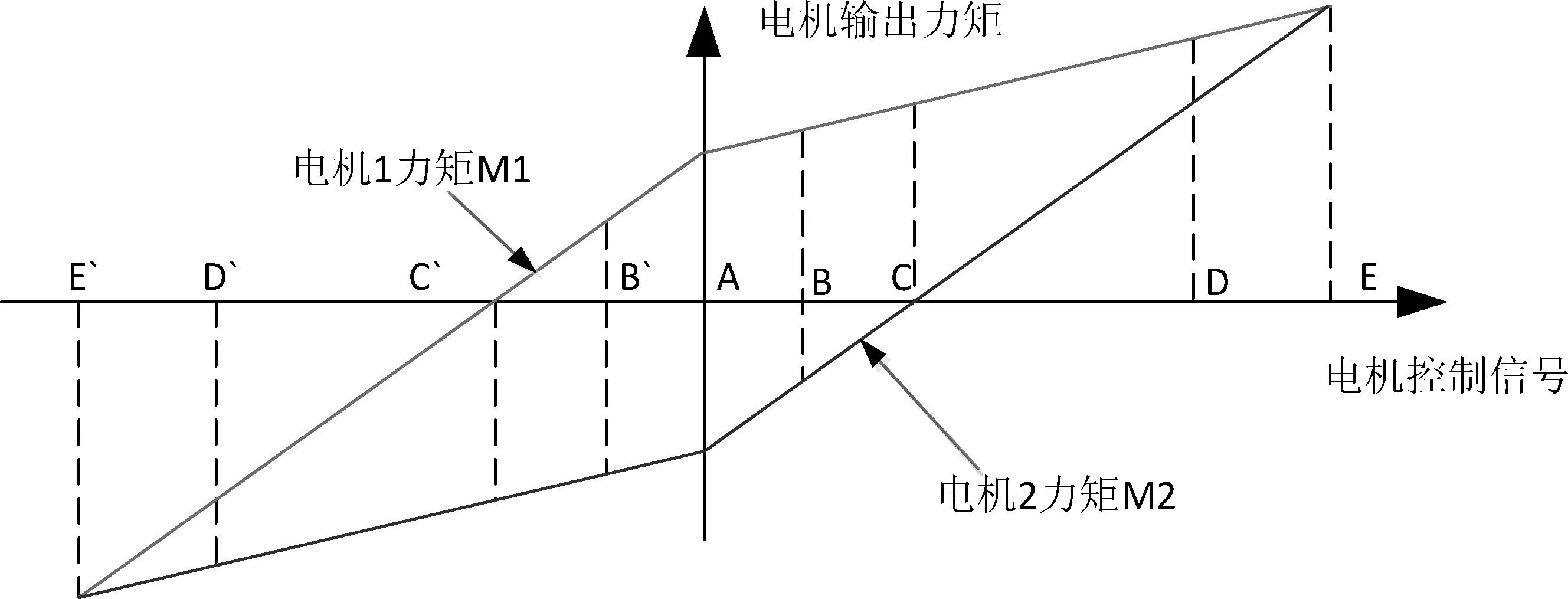
圖5 動態偏執力矩信號
2.3 軟件模擬仿真設計
為進一步驗證伺服系統的設計是否滿足實際要求,通常采用Matlab/Simulink仿真軟件根據實際機械和電氣各元器件的工程參數搭建模型,建立伺服仿真系統(見圖6)。伺服仿真系統通常通過電流環、速度環、位置環三環反饋及前饋進行補償,采用目前工程應用中最常用的PID調節三環參數[3],從而使得目標快速達到給定值的目的。本設計中,伺服電機采用三相交流電機,首先通過電流環調節滿足速度環增益要求,其次在伺服電機后端增加摩擦力矩、轉動慣量等傳遞函數,通過PID調節位置環反饋,實現位置環快速響應閉環,達到快速精密跟蹤的效果。仿真過程中,由于雙電機工作時,采用同時驅動和相互借力制動的原理,將雙電機參數加成后設計為單電機模型,從而更簡潔地進行仿真設計。
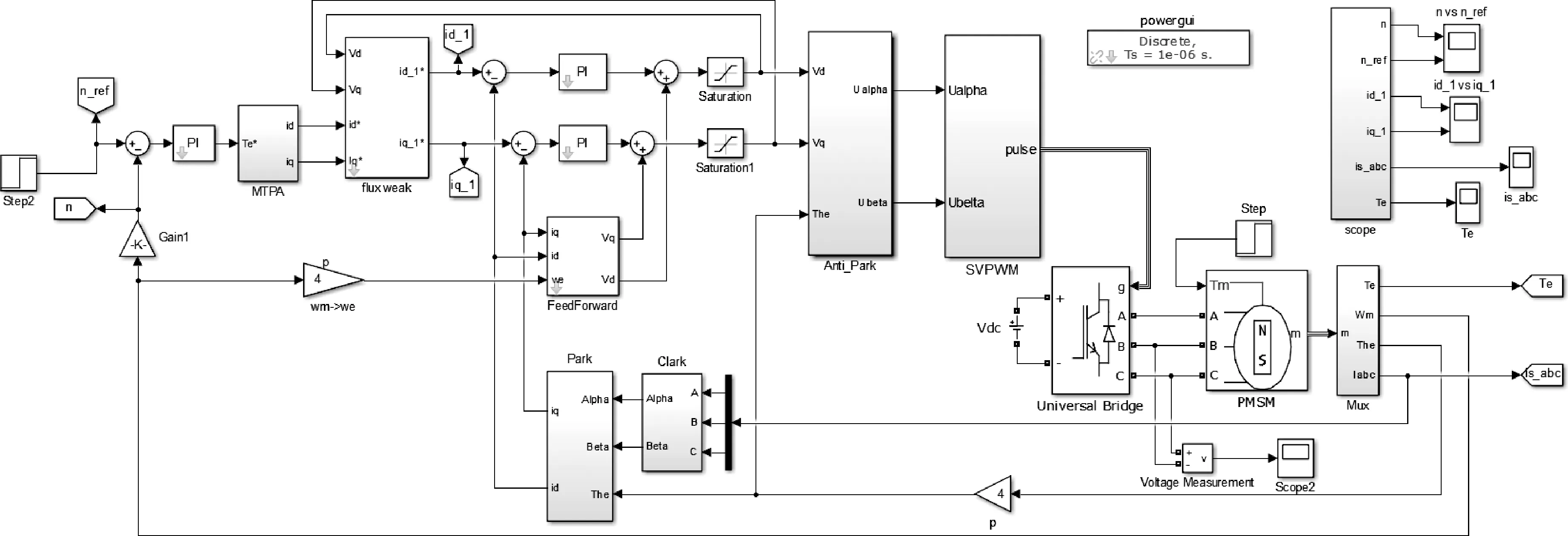
圖6 雙電機伺服系統仿真模型
3 伺服系統仿真
本仿真模型中,為實現伺服系統快速響應追蹤的性能驗證,應采用位置階躍作為輸入,通過Kp、Ki和Kd的調節,以期達到快速響應且穩態的效果。位置階躍給定為1 000,通過調節PID參數,電流環Kp=20,Ki=0.2,Kd=0,速度環Kp=20,Ki=0.4,Kd=0,位置環Kp=6.5,Ki=0.13,Kd=0,得出如圖7所示的位置跟蹤仿真結果。伺服系統在收到位置階躍信號后,進行位置補償,大約在0.04 s時到達階躍位置,整個位置環補償速度響應快速,且無超調,并且系統穩定無震蕩,性能上實現了穩定、快速且準確的特點。
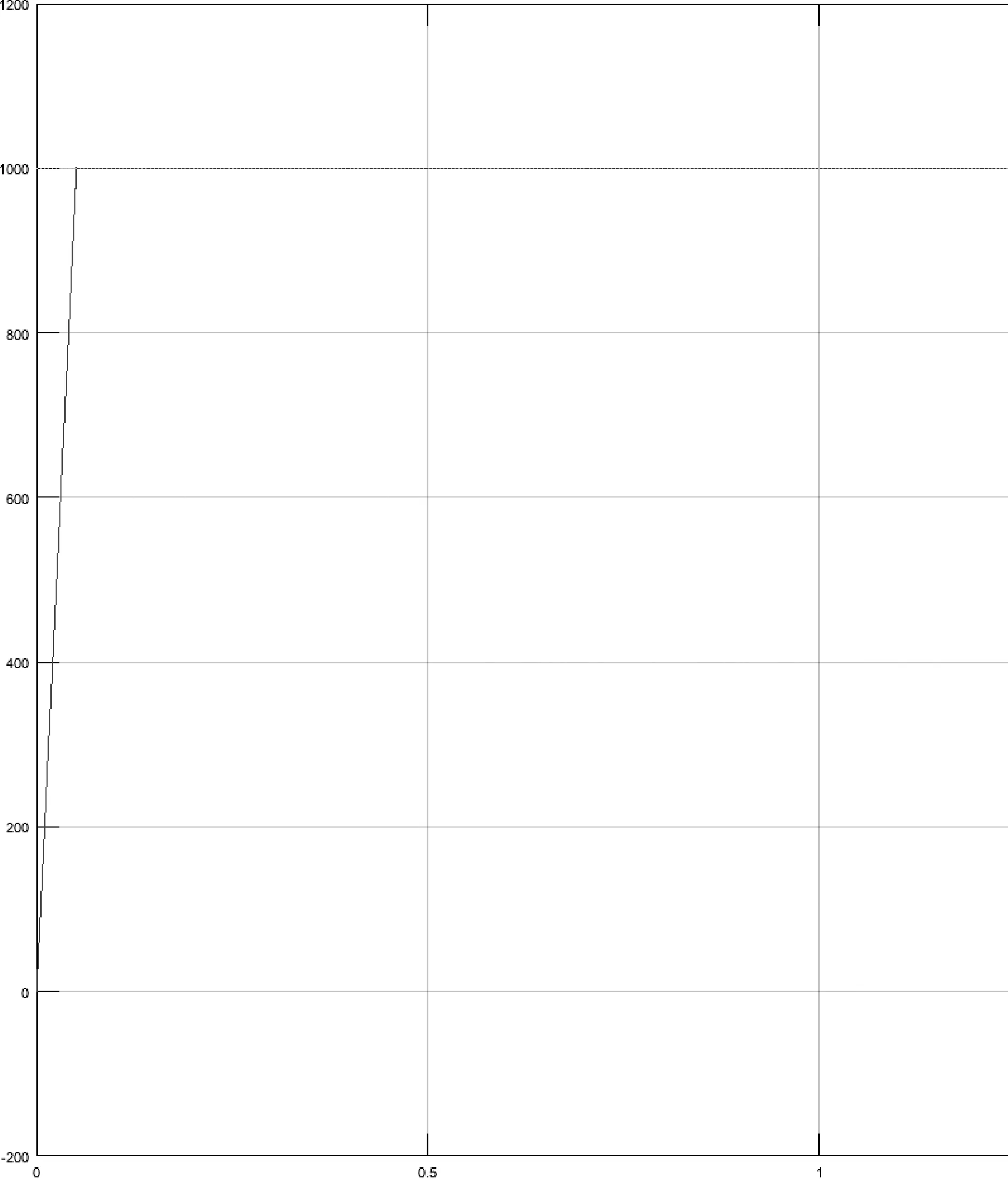
圖7 位置跟蹤仿真結果
4 結語
文章闡述的雷達伺服系統在現代戰爭中針對無人機類小型化、速度快的低空飛行物具有重要的借鑒作用。通過雙電機及電氣同步控制設計,系統實現了在機械電氣性能上的優良指標,且在仿真軟件環境下,通過建模,以簡潔明了的方式,實現了伺服系統在PID參數上的快速確認,為工程實施調試提供了有效參數,為雷達伺服系統性能指標的實現提供了數據佐證。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
