三維激光掃描技術在地鐵隧道檢測中的精度分析
2020-11-21 07:22:06占曉明鄭佳佳袁珊麗
資源導刊(信息化測繪) 2020年10期
占曉明 鄭佳佳 袁珊麗
(浙江華東測繪與工程安全技術有限公司,浙江杭州310014)
1 引言
近年來,隨著地鐵建設的快速發展,地鐵隧道災害變得尤為突出,其安全隱患主要包括隧道結構的變形、滲水、脫落、裂縫等[1]。隨著技術的發展,傳統測量方法由于自身局限性,如全站儀檢測方法采集密度低、速度慢、效率低,近景攝影測量對工作環境光線要求高,越來越難以滿足隧道檢測要求。
三維激光掃描技術發展于上世紀90 年代,作業方式具有非接觸、高效率、高密度和數字化等特點,被稱為繼GNSS 導航定位技術之后測繪領域的又一次技術革命[2-3]。本文分別采用架站式三維激光掃描儀和移動式三維激光描儀采集數據,并以全站儀測量結果作為精度評定的標準,對三維激光掃描儀測量成果進行精度分析,驗證了三維激光掃描技術的可用性。
2 三維激光掃描技術工作原理
2.1 架站式三維激光掃描原理
架站式三維激光掃描系統類似于傳統測量中的全站儀,由激光掃描儀及控制系統、內置數碼相機、后期處理軟件等組成。在儀器內,通過兩個同步反射鏡快速旋轉,將激光脈沖發射體發出的窄束激光脈沖依次掃過被測區域,通過測量時間或相位差計算距離,再根據脈沖激光發射角度,計算出被測點的三維坐標。
架站式三維激光掃描儀通常使用儀器內部自定義坐標系統,掃描儀的激光發射點為坐標點O,Y軸為激光束發射方向,Z軸豎直向上,X軸垂直于YOZ面。三維坐標測量原理如圖1 所示。
公式(1)中,S是被測物體表面任意點P到掃描儀激光發射點O的斜距,水平角α是橫向掃描角度值,豎直角β是縱向掃描角度值。因此,可根據距離值S、水平角度值α和豎直角度值β求出任意點P的三維坐標。
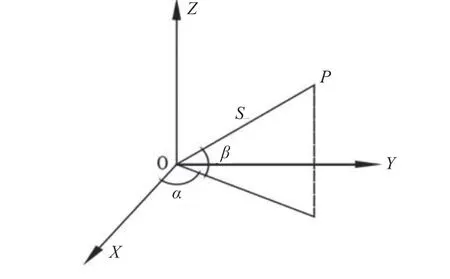
圖1 三維坐標測量原理圖

2.2 移動式三維激光掃描原理

將掃描點相對掃描中心的二維坐標與移動三維激光掃描系統位移數據綁定,即可得到掃描點三維坐標。
3 數據采集與處理
實驗在杭州某運營地鐵隧道中進行,在選定區間的地鐵軌道兩側合適位置布置黑白棋盤靶標作為特征點,依次采用TM50 全站儀、FARO S70 架站式三維激光掃描儀、GRP5000 移動式三維激光掃描儀進行測量。
3.1 FARO S70 架站式三維激光掃描儀作業流程
FARO S70 架站式三維激光掃描儀掃描分辨率設置為1/4,質量精度為3 倍,掃描儀需嚴格執行調平設置,打開補償器,現場測量禁止人員走動。掃描儀工作原理為單點測量,其中正交入射精度最高,測試中所有斷面數據盡可能滿足正交入射。實驗所有測量數據不采取拼接形式,后處理數據直接在原始點云提取斷面。
3.2 GRP5000 移動式三維激光掃描儀作業流程
分別采用50Hz、20000 點每圈和100Hz、10000 點每圈采集數據,一人推行小車采集數據,一人記錄。GRP5000 移動式三維激光掃描儀按規定在選定區間采集三次同向數據,現場人員記錄臺賬。采用最新版本RAIL 處理數據,數據斷面嚴格按現場布置標志點提取。
4 精度分析
使用的儀器在數據采集時有各自的坐標系,統一坐標系會帶來額外的工作量及坐標轉換誤差。因此,實驗不采用直接對點坐標分析方法,而是將儀器自身坐標系統下獲得的各靶標中心點間距作為最終成果進行分析。GRP5000 移動式三維激光掃描儀點云采集方式為線掃描模式,分別采用50Hz 和100Hz 掃描頻率進行了10 次同向數據采集,并用白塞爾公式計算了誤差,成果統計如表1 所示。50Hz 掃描頻率下,測量成果最弱點中誤差為±0.9 mm,100Hz 掃描頻率下,最弱點中誤差為±1.8 mm,50Hz 掃描頻率測量成果精度更高。
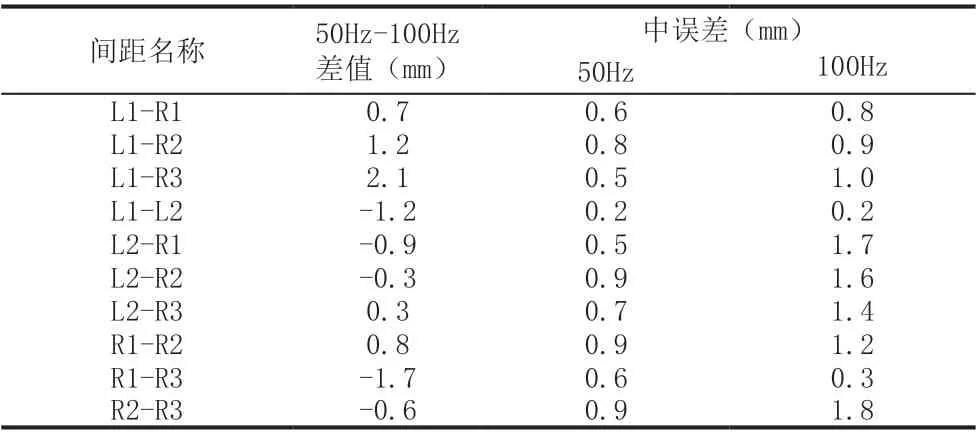
表1 GRP5000移動式三維激光掃描儀在50Hz和100Hz下測量結果差值及各自中誤差
各測量系統間差值比如表2 所示,TM50 全站儀與FARO S70 架站式三維激光掃描儀測量結果相仿,最大差值為1.8 mm,GRP5000 移動式三維激光掃描儀與TM50 全站儀、FARO S70 架站式三維激光掃描儀的較差較大,最大差值分別為4.6 mm 和4.7 mm。實驗中FARO S70 架站式三維激光掃描儀只進行了單站掃描,因此沒有點云拼接誤差,數據后處理過程采用曲面擬合的方式自動提取靶標中心點,故精度較高。GRP5000 移動式三維激光掃描儀由人工提取靶標,所以誤差產生原因除儀器本身精度和掃描頻率外,也與人工識別靶標有關。
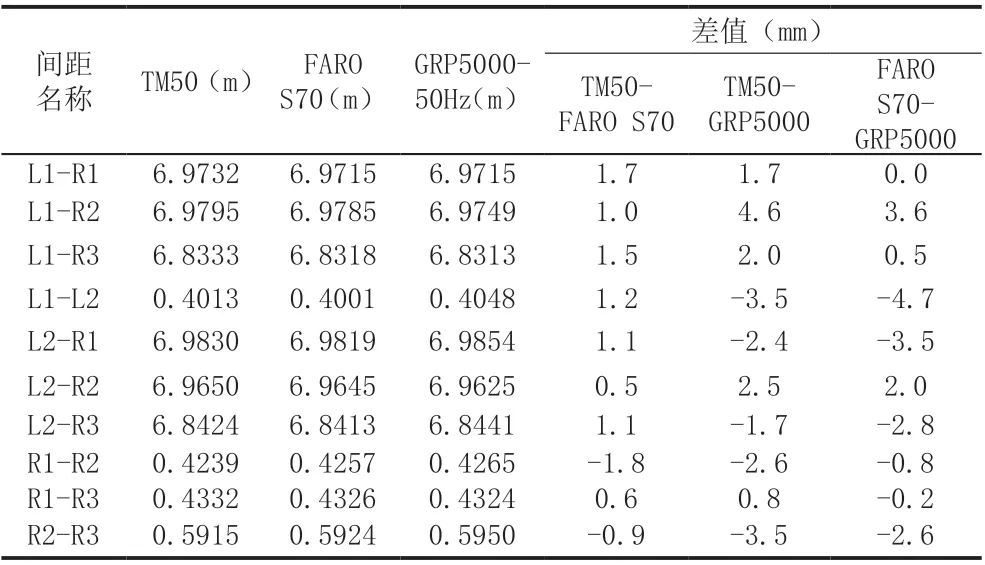
表2 各測量系統間差值對比
5 結論
本文通過在地鐵隧道中分別使用三種測量儀器對所布設靶標中心進行提取計算并分析,得出以下結論:
(1)GRP5000 移動式三維激光掃描儀采用50Hz頻率比100Hz 頻率精度更高,但兩者相差不大。與100Hz 掃描頻率相比,采用50Hz 頻率掃描作業時間更長,存儲數據所需空間更大,數據處理時間更久,因此作業前可根據自身所需精度選擇合適的掃描頻率。
(2)FARO S70 架站式三維激光掃描儀達到TM50全站儀的精度,兩者差值在2 mm 以內;GRP5000 移動式三維激光掃描儀精度稍差,與TM50 全站儀差值在5 mm 以內。
通過與傳統測量方式的成果進行精度對比,實驗證明了三維激光掃描技術在地鐵隧道檢測中的可用性,也為該技術的深入應用提供了依據。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08