高速列車半主動懸掛系統的振動及主動控制
2020-11-10 01:34:54趙艷影黃小衛
科學技術與工程 2020年28期
趙艷影, 黃小衛
(南昌航空大學飛行器工程學院, 南昌 330063)
在中國鐵路高速化的背景下,列車運行速度不斷提高。隨著列車的提速,車輛的振動性能不斷惡化。目前對高速列車減振技術的研究主要集中在車輛系統動力學、半主動懸掛系統控制律、半主動懸掛系統減振器三個方面。對車輛系統動力學的研究主要集中研究非線性輪軌接觸[1]、動力學分岔[2]、蛇形動力學行為[3]、動力學仿真模型[4]、懸掛系統參數設計等[5]幾個方面。現代車輛正朝著安全、舒適的方向發展,因軌道不平順導致的車體振動引起了學者們的關注,懸掛系統智能化解決了傳統被動懸掛存在的舒適性和穩定性不能兼顧的問題。主動懸掛系統是在懸掛系統中加入受控作動器,以抑制車體的振動[6]。雖然主動懸掛性能最優,但是也存在內部結構復雜、成本高、耗能高等問題,尤其重要的是不能控制在懸掛失效時的穩定性,這些缺陷導致其在實際列車上應用不多。針對主動懸掛系統的缺點,半主動懸掛因其結構大大簡化以及控制效果良好等優勢應運而出[7]。時間滯后,簡稱時滯,是系統中存在的時間延遲現象,所有的控制系統中不可避免地存在時滯現象[8],它可以在信號的測量、采集、傳遞等過程中,也可以存在于目標的反應過程中。針對半主動懸掛系統中的時滯問題,目前得到的一般結論是:時滯對控制系統具有顯著的惡化影響[9],從而提出了時滯研究的必要性[10]。這種惡化影響主要體現在時滯對車輛運行平穩性[11]、蛇形運動穩定性和隨機振動響應[12]等,針對車輛系統動力學性能的仿真[13]研究也證實了時滯是半主動懸掛系統的不利因素。采用合理的控制律進行時滯補償或時滯消除的方法,可以減小時滯對系統的影響,一般都能夠使得控制系統得到明顯改善。然而,研究也發現,時滯對車輛懸掛系統動力學行為的影響不是一成不變的,在某些時滯的區間內,時滯的存在能夠改善懸掛系統的性能[14],通過對控制參數進行優化,能夠有效降低車身加速度[15],從而提供了利用時滯的可能。本文及文獻[16]對兩自由度高速列車半主動懸掛系統的垂向振動進行研究,考慮了二系懸掛中的剛度三次非線性,重點討論時滯反饋控制對車體振幅的影響規律,從而能夠利用時滯改善懸掛系統的振動特性。
1 懸掛系統的控制微分方程
圖1是高速列車半主動懸掛系統垂向振動的動力學模型。
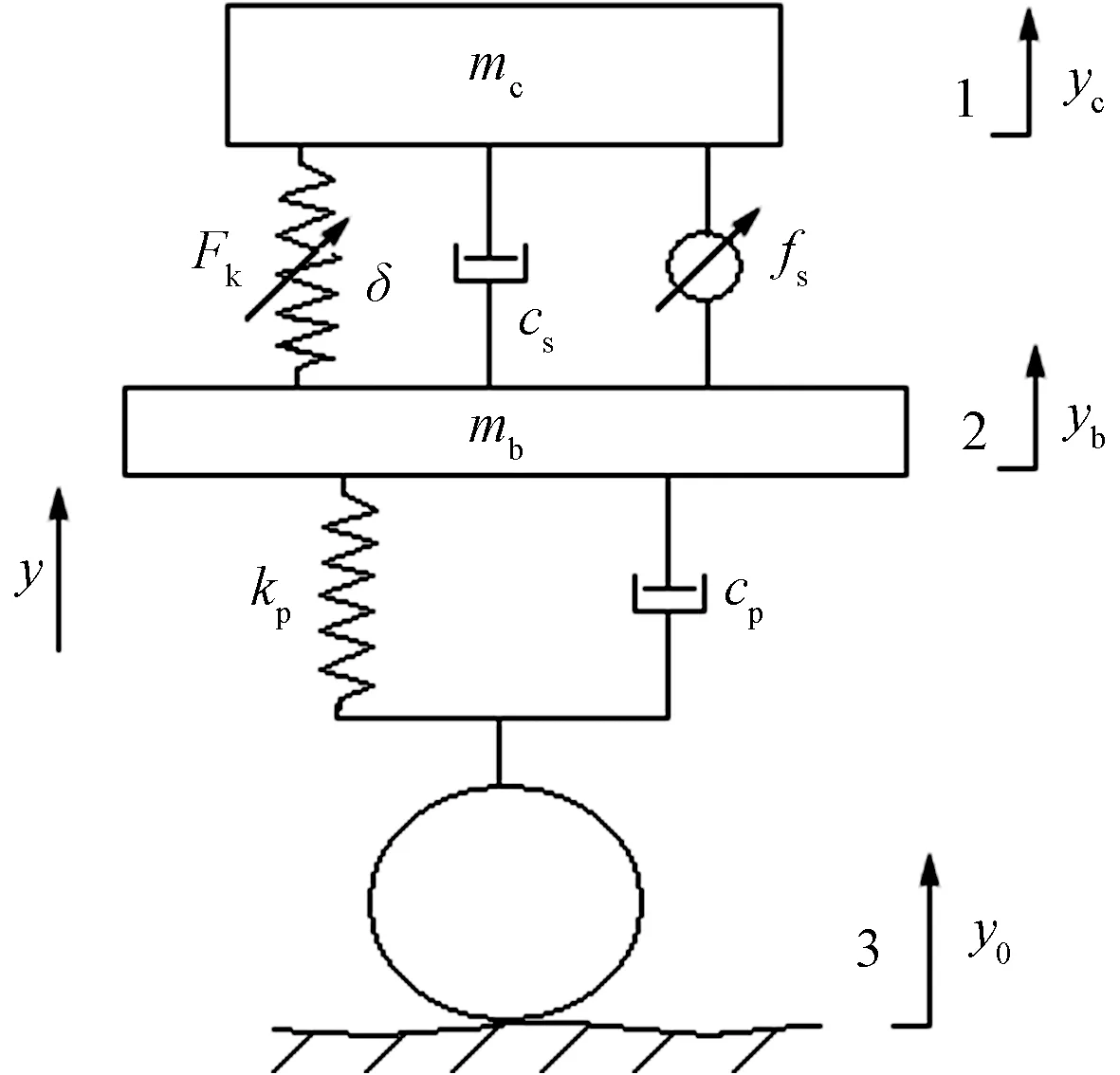
圖1 高速列車半主動懸掛系統垂向振動模型Fig.1 Vertical vibration model of semi-active suspension system of high-speed train


ks[yb(t)-yc(t)]-δ[yb(t)-yc(t)]3=0
(1)

kp[y0(t)-yb(t)]+ks[yb(t)-yc(t)]+
δ[yb(t)-yc(t)]3=0
(2)
式中:yb和yc分別表示轉向架和車體的位移;y0表示軌道不平順激勵,將其簡化為簡諧外激勵的形式:y0=Fcos(Ωt),F為外激勵振幅,Ω為外激勵頻率。當fs=0時,反饋控制項消失,振動系統退化為非線性的被動控制系統。當τ=0時,時滯反饋控制項消失,振動系統退化為非線性主動無時滯反饋控制系統。
高速列車懸掛系統的物理參數參照CRH5選取,如表1所示。
表1 懸掛系統物理參數
2 線性系統的幅頻及減振特性
首先,不考慮非線性因素,分析線性系統的振動特性。圖2分別給出了線性被動減振系統(即fs=0,τ=0,δ=0),在不存在阻尼和存在阻尼兩種情況下垂向振動的幅頻響應曲線,其中外激勵振幅選擇為F=40 mm。
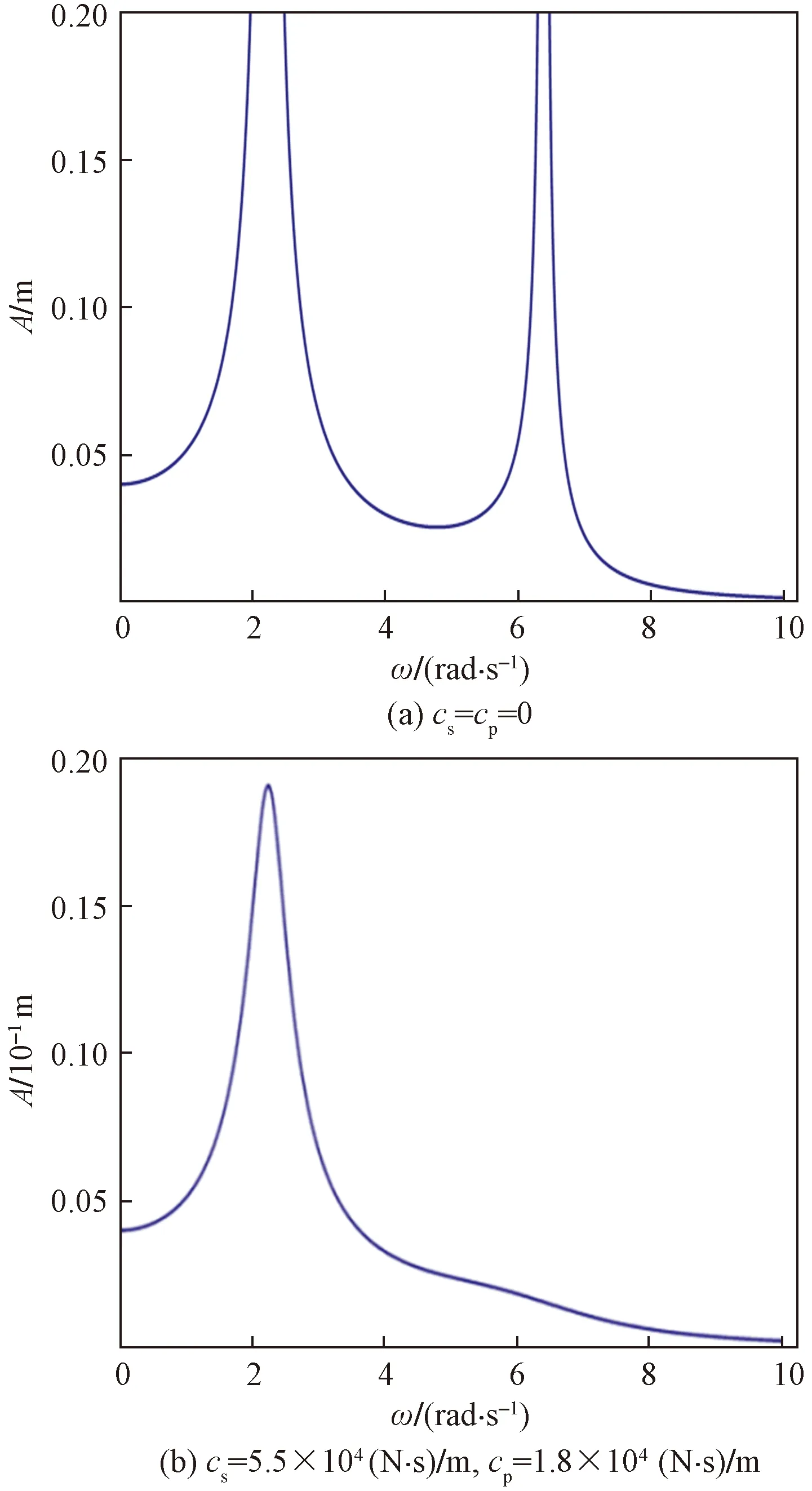
圖2 車體的幅頻響應曲線Fig.2 Amplitude-frequency response curves of vehicle body
從圖2可以看出,當懸掛系統存在阻尼時,二階模態頻率ω2=6.39 rad/s對應的車體振幅峰值基本消失,只有一階模態頻率ω1=2.24 rad/s對應的車體振幅最大,振動最惡劣,振幅最大值可達0.19 m。
下面考慮在外激勵頻率趨近系統一階振動模態頻率時線性時滯反饋控制的減振特性,得到的車體振幅隨反饋增益系數和時滯變化如圖3所示。
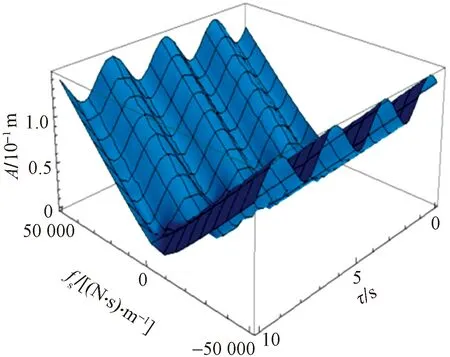
圖3 反饋增益系數和時滯對車體振幅的影響Fig.3 Effects of gain and time delay on amplitude of vehicle body
由圖3可以看出,車體振幅A受到反饋增益系數和時滯兩個控制參數的影響,對于某一特定的時滯參數,反饋增益系數fs=-7 506.18 (N·s)/m時車體的振幅最小,因此可選定反饋增益系數為fs=-7 506.18 (N·s)/m。反饋增益系數確定之后,可以在某些時滯區間選擇時滯參數達到抑制車體振幅的目的,但同時要對系統進行穩定性分析,保證系統在穩定的狀態下工作,在此對線性時滯反饋控制系統不做詳細介紹。下面考慮非線性系統及時滯反饋控制的效果。
3 非線性系統的近似多尺度法
對非線性時滯反饋控制系統,采用多尺度方法結合模態設解的方法進行分析。首先,將式(1)、式(2)寫成矩陣的形式為

(3)
將式(3)的解設為模態解的形式yc=q1+q2,yb=r1q1+r2q2,即:
(4)
式(4)為(yc,yb)與(q1,q2)兩組坐標之間的變換關系,其中坐標變換矩陣設為u,其轉置為uT。

(5)
將式(4)代入式(3),再將式(3)左乘矩陣uT得:
(6)

(7)
為方便采用多尺度方法進行攝動分析,將各量標注如下:mc=m1,mb=m2,ks=k1,kp=k2,cs=εc1,cp=εc2,δ=εδ,fs=εfs,fs=εfs。則式(7)可寫為
δ(1-r1)(q1+q2-r1q1-r2q2)3]
(8)
εr2k2fcos(Ωt)-ε[c1-r1c1-r2c1+
δ(1-r2)(q1+q2-r1q1-r2q2)3]
(9)
采用多尺度法對系統動力學方程進行攝動分析,求解式(8)、式(9)的二階近似解,將解的形式表示為
(10)
式(10)中:時間尺度Tr為新引入的自變量,Tr=εrt,r=0,1,2,…,偏導算子為
(11)



(12)


(13)

(14)
將式(10)~式(14)代入到式(8)、式(9)中,并比較ε同次冪,得到:
ε0:

(15)

(16)
ε1:
r1r2(c1+c2)]D0q21-[(1-r1)fs(D0q11τ+
D0q21τ)+δ(1-r1)(q11+q21-r1q11-
r2q21)3]+r1k2fcos(Ωt)
(17)
[c1-2r2c1+r1r2(c1+c2)]D0q21-
[(1-r2)fs(D0q11τ+D0q21τ)+δ(1-r2)
(q11+q21-r1q11-r2q21)3]+r2k2fcos(Ωt)
(18)

ε0:

(19)

(20)
ε1:
[c1-r1c1-r2c1+r1r2(c1+c2)]D0q21-
[(1-r1)fs(D0q11τ+D0q21τ)+δ(1-r1)×
(q11+q21-r1q11-r2q21)3]+r1k2fcos(Ωt)}
(21)
[c1-2r2c1+r1r2(c1+c2)]D0q21-
[(1-r2)fs(D0q11τ+D0q21τ)+δ(1-r2)×
(q11+q21-r1q11-r2q21)3]+r2k2fcos(Ωt)}
(22)
設微分方程組的解為
q11=A(T1)eiω1T0+cc
q21=B(T1)eiω2T0+cc
(23)
式中:A和B是未知的函數;cc代表其前面各項的共軛。外激勵項和時滯項可以表示為

(24)
(25)
將式(24)、式(25)代入到式(21)、式(22)中得:
K3e3iω1T0+K4e3iω2T0+K5eiT0(-2ω1+ω2)+
K6eiT0(2ω1+ω2)+K7eiT0(-ω1+2ω2)+
K8eiT0(ω1+2ω2)+K9eiω1(T0-τ)+
K10eiω2(T0-τ)+K11eiΩT0]+cc
(26)
K14e3iω1T0+K15e3iω2T0+K16eiT0(-2ω1+ω2)+
K17eiT0(2ω1+ω2)+K18eiT0(-ω1+2ω2)+
K19eiT0(ω1+2ω2)+K20eiω1(T0-τ)+
K21eiω2(T0-τ)+K22eiΩT0]+cc
(27)

4 非線性系統平衡解線性系統的幅頻及減振特性
由系統幅頻曲線可以看出,車體的一階模態振幅最大。下面研究外激勵頻率趨近系統的一階模態頻率時振動系統的平衡解。為此,引進及分別表示外主共振解諧參數和1∶3內共振解諧參數為
(28)
式(26)、式(27)可寫成如下形式:
K3e3iω1T0+K4e3i(3ω1+εσ2)T0+
K5eiT0(ω1+εσ2)+K6eiT0(5ω1+εσ2)+
K7eiT0(5ω1+2εσ2)+K8eiT0(7ω1+2εσ2)+
K9eiω1(T0-τ)+K10ei(3ω1+εσ2)(T0-τ)+
K11ei(ω1+εσ1)T0}+cc
(29)
K14ei(ω2-εσ2)T0+K15e3iω2T0+

(30)
得到式(29)、式(30)的可解性條件,并化簡得到:

(31)

(32)


(33)
(34)

(35)
(36)
式中:φ1=θ2-3θ1+σ2T1,φ2=σ1T1-θ1。
為了確定對應的穩態運動的定常解振幅和相位,即在a′=b′=φ′1=φ′1-3φ′2=0時的平衡解,以判斷平衡解的穩定性,首先將式(33)~式(36)轉化到直角坐標系下:為此,設:s1=acosφ2,d1=asinφ2,s2=bcos(φ1-3φ2),d2=bsin(φ1-3φ2),則式(33)~式(36)變為

(37)

(38)
s′2=b′cos(φ1-3φ2)-b(φ′1-3φ′2)×

(39)
d′2=b′sin(φ1-3φ2)+b(φ′1-3φ′2)×

(40)
5 非線性系統的時滯反饋控制
車體的位移形式可以近似表達為
yc=q1+q2=q11+q21+ε(q12+q22)+
ε2(q13+q23)+…≈q11+q21≈
acos[ω1T0+θ1(T1)]+
bcos[ω2T0+θ2(T1)]=y1+y2
(41)
式(41)中:y1=acos[ω1T0+θ1(T1)],y2=bcos[ω2T0+θ2(T1)]。

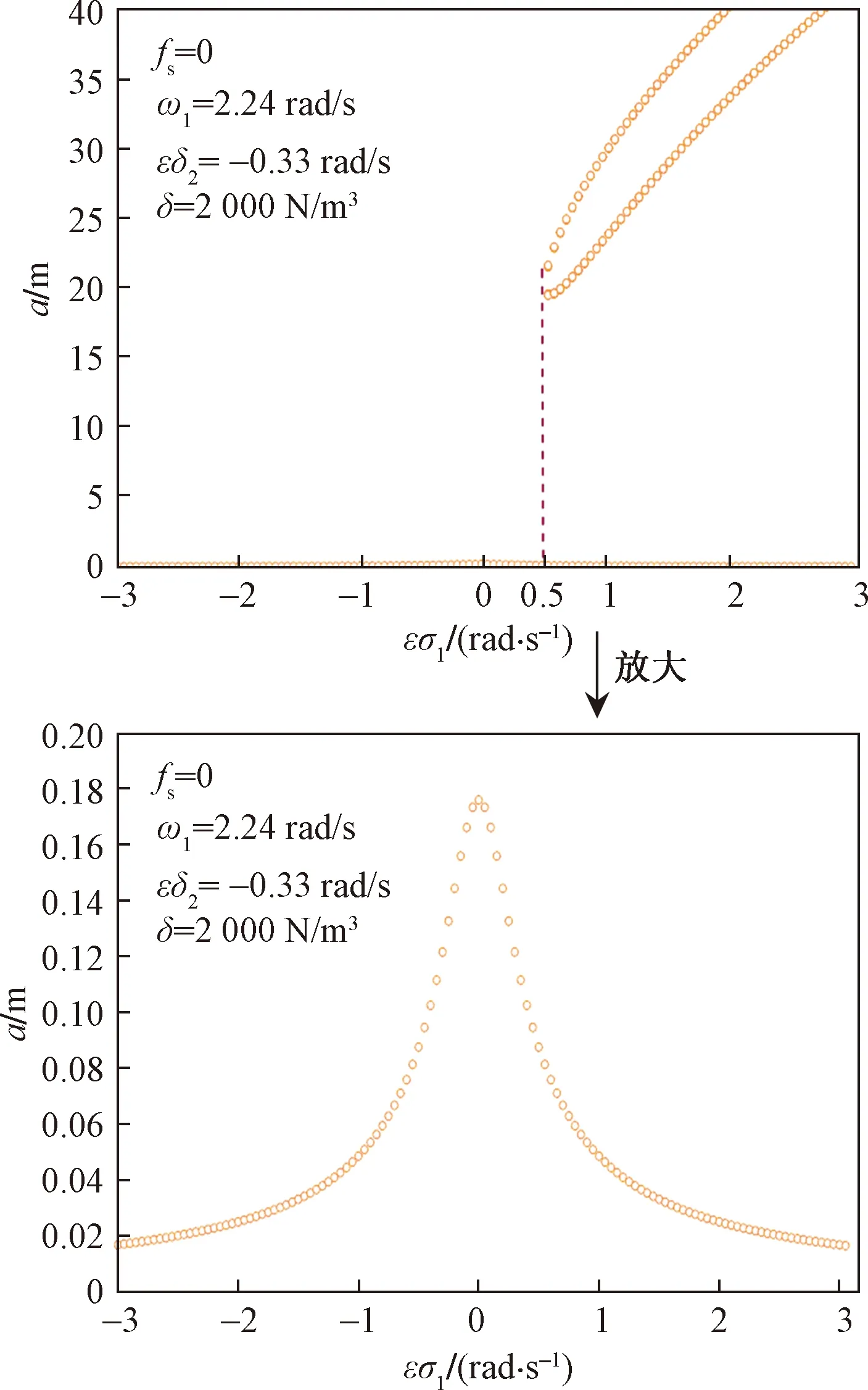
圖4 車體的幅頻響應曲線aFig.4 Amplitude-frequency response curves a of vehicle body
從圖4、圖5可以看出,當外激勵在主共振點右側(即εσ1>0.5),振動系統的幅頻響應曲線出現了多解現象,對應某一個確定的外激勵頻率有三個解支,其中上下兩條曲線是穩定的,中間的曲線是不穩定的。根據非線性系統的特性很容易判斷,當振動系統的初始條件較小時,系統對應振幅較小的解支;當振動系統的初始條件較大時,系統對應振幅較大的解支。而且容易觀察到,振幅a的量級要遠遠大于振幅b的量級,因此對于主動控制系統,重點討論采用時滯反饋控制振動系統在主共振點及其附近對振幅a的控制效果。以外激勵頻率分別在εσ1=-0.2 rad/s、εσ1=0和εσ1=0.2 rad/s三點為例進行研究。圖6是時滯系統的車體振幅隨時滯量的變化曲線,根據以上分析,反饋增益系數選擇為fs=-7 506.18 (N·s)/m。
從圖6可以看出,振幅a隨著時滯量的變化呈現周期性的變化趨勢,有波峰和波谷,這說明時滯對振動系統的振幅有調節作用。理論上存在某些時滯區間,在這些區間內振動系統的振幅有明顯的減小,可以在這些時滯的減振區間內調節時滯量,以達到抑制車體振幅的目的。然而在某些時滯區間內,由于時滯量的出現導致了系統出現不穩定,系統的振動將更加惡劣,在實際工作中應避免將時滯調節到不穩定區間內。
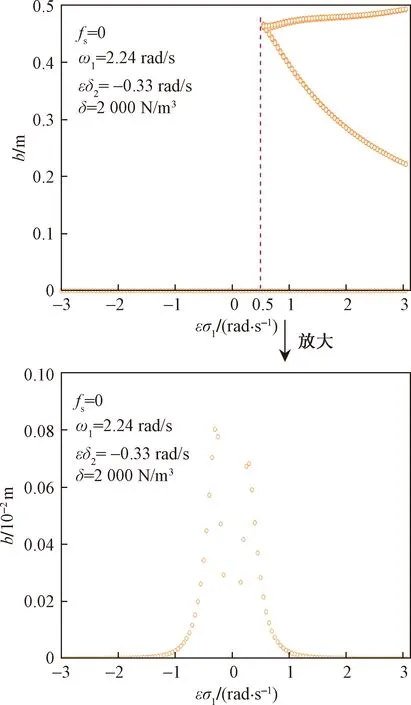
圖5 車體的幅頻響應曲線bFig.5 Amplitude-frequency response curves b of vehicle body
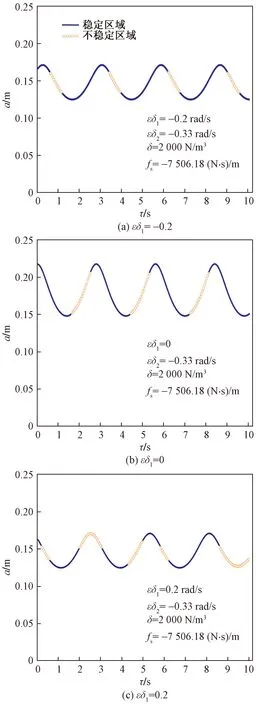
圖6 車體的振幅-時滯響應曲線Fig.6 Amplitude-delay response curves of vehicle body
6 數值模擬

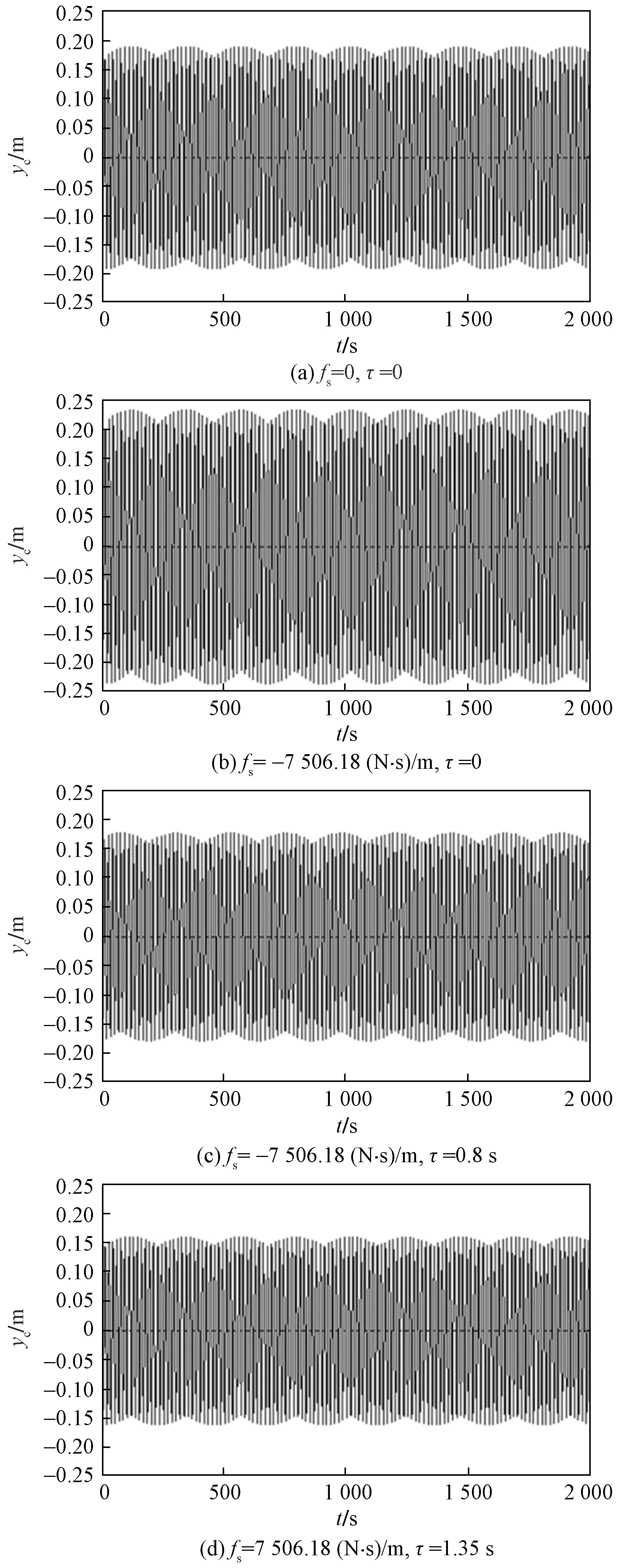
圖7 車體時間歷程響應曲線Fig.7 Time history response curves of vehicle body
從圖7中車體位移的時間歷程響應曲線可以看出,圖7(a)為被動系統,振幅約為0.19 m。圖7(b)為采用時滯反饋控制,且時滯量為零時的情況,可以看出系統的振幅增大了,振幅約為0.24 m,說明采用無時滯的反饋控制系統的振幅反而增大了。圖7(c)為在時滯減振區間內的選擇的時滯量,當時滯量選擇為τ=0.8 s時,振幅減小了,約為0.17 m,說明時滯反饋有抑制系統振幅的作用。圖7(d)為在時滯減振區間內的選擇的一個最佳時滯量,當時滯量選擇為τ=1.35 s時,振幅減小到最小值,約為0.16 m,說明時滯量的合理選擇能夠達到最好的減振狀態。實際上時滯量的最佳減振點不是唯一的,當選擇為τ=4.16 s也能到達最佳減振效果。
7 結論
對兩自由度高速列車半主動懸掛系統的垂向振動進行研究,考慮了二系懸掛中的剛度三次非線性。通過利用設模態解、方程解耦、多尺度等方法對振動方程進行求解,得到了系統的二次近似解析解,分析了系統在主外共振和1∶3內共振同時存在時的動力學行為。采用時滯反饋控制系統的振動,分別對線性和非線性時滯減振性能進行了分析,得到的主要結論如下:
(1)所用到的物理參數都是有實際量綱的參數,在此基礎上對懸掛系統進行的分析和計算都是有實際物理意義的,對工程實際有重要參考價值。
(2)對線性被動控制系統,得到了振動系統的幅頻響應曲線,由于二階模態的振幅遠遠低于一階模態的振幅,重點研究了當外激勵頻率趨近一階模態頻率和1∶3內共振的同時存在時采用時滯反饋控制系統的振動。
(3)對線性時滯反饋控制系統,得到了車體振幅相對反饋增益系數和時滯變化的圖形,找到了最佳的反饋增益系數。針對所有的時滯,當反饋增益系數取得該值時車體的振幅最小。
(4)對非線性時滯反饋控制系統,得到了車體振幅隨著時滯量變化的響應曲線,得到了時滯的減振區間,在該區間內選擇時滯量能夠達到抑制車體振幅的目的。并且存在一些時滯的最佳值,當時滯選擇該數值時車體的振動能夠抑制到最小。
(5)時滯是可以利用的控制參數,合理地利用時滯能夠達到抑制系統振動的目的;同時時滯也是導致系統不穩定的因素,在某些時滯區間能夠導致系統失去穩定導致破壞。
(6)數值模擬結果和解析結果吻合,證明了結果的正確性和可靠性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44