基于模擬法的反魚雷魚雷武器系統作戰效能評估
2020-11-10 02:09:56蔣繼軍
水下無人系統學報 2020年5期
關鍵詞:模型
曹 萌,趙 琪,蔣繼軍
(中國船舶重工集團公司 第705 研究所,陜西 西安,710077)
0 引言
反魚雷魚雷(anti-torpedo torpedo,ATT)對抗對象是高速機動小目標,大多數情況下其與來襲魚雷是相向運動,相對陣位和視角變化大,與常規魚雷的對抗過程存在較大差異。同時,ATT 作為艦船防御最后一道硬殺傷武器,責任重大,其作戰效能直接關系到艦船的生死存亡,在真實的戰場環境下綜合評估ATT 作戰效能,使效能評估與設計研制形成良性循環,可最大限度地提升ATT 的作戰效能。
目前,針對魚雷作戰效能評估主要有解析法和模擬法2 種[1]。針對魚雷與目標相對運動關系比較明確的情形,應用解析法可以得到較準確的解,由于ATT 與來襲魚雷相對運動關系的復雜性和不確定性,應用解析法則比較困難;而模擬法可以真實地仿真各種作戰環境、ATT 復雜的搜索過程及其導引彈道,以及目標的任意機動,且能在短時間內完成較大計算量。
基于此,文中在分析反魚雷魚雷作戰系統(anti-torpedo torpedo weapon system,ATTWS)作戰過程的基礎上,構建了ATTWS 作戰效能評估指標體系,開展了基于模擬法的ATTWS 作戰效能評估。
1 ATTWS 作戰效能評估思路
應用模擬法進行ATTWS 作戰效能評估的具體思路如圖1 所示。

圖1 ATTWS 作戰效能評估思路Fig.1 Operational effectiveness evaluation ideas of ATTWS
2 ATTWS 作戰效能評估指標體系
2.1 作戰過程分析
有效對抗來襲魚雷的先決條件是能否在足夠遠的距離外可靠探測到來襲魚雷,然后結合我方兵力部署、對抗裝備等情況,對戰場態勢進行快速反應,采取對抗措施。
ATT 為精確打擊武器,魚雷報警聲吶在被動工作方式下,由于解算誤差較大,無法滿足ATT攻擊的需要,因此,考慮魚雷主被動報警聲吶工作條件下的作戰流程如下[2-5]:
1) 系統準備,魚雷報警聲吶以被動工作方式值更警戒;
2) 魚雷報警聲吶以被動工作方式發現來襲魚雷目標,進行魚雷報警,主動聲吶開機,在被動報警方位附近進行探測;
3) 根據來襲魚雷報警方位進行解算,目標方位等要素具備發射使用武器的條件后,發射干擾器、聲誘餌軟對抗器材,干擾、誘騙來襲魚雷;
4) 主動報警聲吶發現目標后,本艦保持現有航向并持續跟蹤目標,依據主動探測信息進行目標要素解算;
5) 發射ATT 進行末段攔截。
2.2 指標體系構建
ATTWS 作戰效能不僅是武器自身作戰能力的體現,還受發射平臺預警系統、作戰使用策略、射擊要素等諸多因素影響。在指標體系研究中分層次進行,逐層建立單項效能指標和系統效能指標。利用復雜系統層次分析法劃分多個層級,采用自底向上的方式,先針對ATT 本身的作戰指標,再綜合發射平臺魚雷預警能力、平臺反應時間、防御策略效能、目標要素解算精度和反魚雷射擊精度。ATTWS作戰效能評估指標體系規劃如圖2 所示。
ATTWS 作戰效能評估指標由平臺探測效能指標、平臺解算效能指標、ATT 捕獲目標效能指標和攔截毀傷目標效能指標構成。平臺探測能力指系統的魚雷報警能力,包括目標航向誤差和目標距離誤差;平臺解算能力指系統對戰場信息態勢的綜合處理判斷能力,包括戰場敵我態勢的綜合分析及對抗決策處理等過程,主要由射擊諸元解算誤差反映;ATT 捕獲目標能力指在一定的報警條件下ATT 能夠在多大程度上發現來襲魚雷,主要由ATT 首次捕獲目標時間、水平方位角、垂直方位角和雷目距離組成;ATT 攔截毀傷目標能力指ATT 發現來襲魚雷后,能夠在多大程度上于一定距離接近來襲魚雷并對其造成毀傷的能力,主要由ATT 攔截目標時間、脫靶量、航程消耗和最大旋回角速度組成。
3 ATTWS 作戰效能評估仿真
3.1 仿真系統
ATTWS 作戰效能評估仿真系統由仿真模型、作戰想定、仿真調度、作戰效能分析和數據管理等5 個部分組成,總體結構如圖3 所示。
3.2 仿真模型
文中依托仿真技術手段,采用作戰模擬法進行,建立攻防對抗過程各實體模型是ATTWS 作戰效能評估的重中之重,有利于作戰效能評估的準確性。ATT 攻防對抗數學仿真原理[6-7]見圖4。

圖3 ATTWS 作戰效能評估仿真系統Fig.3 Operational effectiveness evaluation simulation system of ATTWS
3.2.1 ATT 模型
1) 運動動力模型: 建立六自由度空間運動方程組,完成魚雷動力學和運動學方程解算。
2) 控制系統模型: 三通道耦合穩定控制模型。
3) 彈道邏輯模型: 包括入水下潛彈道、初始搜索及確認彈道、跟蹤導引彈道模型。
4) 主動自導檢測模型: 完成主動自導工作模式下的高速小目標檢測。
5) 被動自導檢測模型: 完成被動自導工作模式下的目標檢測。
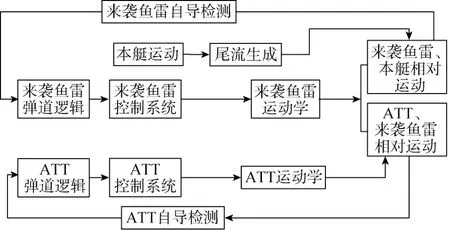
圖4 ATT 數學仿真原理圖Fig.4 Principle of numerical simulation of ATT
3.2.2 來襲魚雷模型
1) 運動動力模型: 建立六自由度空間運動方程組,完成魚雷動力學和運動學方程解算。
2) 控制系統模型: 以在役重型反艦魚雷模型為基礎適當簡化,包括三通道耦合穩定控制模型。
3) 彈道邏輯模型: 重型魚雷典型全彈道模型,包括程序彈道、自導導引彈道、尾流導引彈道等,根據自導檢測結果執行全彈道邏輯轉換。
4) 主動自導檢測模型: 完成主動自導工作模式下的目標檢測。
5) 被動自導檢測模型: 完成被動自導工作模式下的目標檢測。
6) 尾流自導檢測模型: 尾流工作模式下的目標檢測,實現左、中、右三通道能量級檢測。
3.2.3 本艦模型
1) 運動模型: 采用質點運動實現二維水平面運動過程模擬。
2) 尾流生成模型: 艦船尾流特性模擬,包括尾流形狀模型、空穴模型和回波生成模型。
3) 魚雷報警聲吶探測模型: 模擬聲吶探測過程,包括魚雷報警聲吶誤差模型,來襲魚雷目標方位和距離估計模型。
4) 射擊諸元解算模型: 根據魚雷報警聲吶解算ATT 射擊要素,包括現在方位射擊解算模型、正常提前角射擊解算模型、有利提前角射擊解算模型和迎面攔截射擊解算模型。
4 ATTWS 作戰效能評估模型
4.1 指標權重算法模型
主客觀綜合賦權法即可排除個人因素對指標權重的影響,又能避免當客觀數據較為特殊時,權重會與實際情況相差較大的情形,因此對于精度要求較高的系統,宜采用主客觀綜合賦權法來提高指標權重的可信度,文中采用層次分析-熵權法進行指標權重賦值。
通過層次分析法[8-9]得到主觀權重λj,通過熵權法[10]得到客觀權重θj,二者相結合得到綜合權重ωj,即

計算綜合權重ωj時采用的主觀權重λj與客觀權重θj均為最底層指標的權重,結合的過程只是在用主客觀2 種方法各求得所有指標權重后,對于指標結果的簡單綜合。當用2 種方法求出的某指標權重值相差懸殊時,會使綜合權重失調,不足以體現指標的實際重要程度。
針對上述方法中存在的問題,文中提出一種改進的指標權重綜合求取方法。
在運用層次分析法對準則進行評價時,往往能夠很好地把握上層準則的重要程度,而對該準則下子準則的評價可能出現偏差。基于此特點,對綜合權重的解算方法進行改進,從而得到各指標客觀準確的權重,具體步驟如下:
1) 設有l個上層準則,m個子準則,每個上層準則分別包含m1,m2,…,ml個子準則,且m1+m2+…+ml=m,通過層次分析法求得上層準則權重記為A={β1,β2,β3,…,βl},各子準則的權重記為B={λ1,λ2,λ3,…,λm},熵權法求得的各準則的權重為C={θ1,θ2,θ3,…,θm};
2) 對層次分析法與熵權法計算的子準則的權重按照式(1)進行綜合,得到各子準則的綜合權重為D={ω1,ω2,ω3,…,ωm};


4.2 效能評估算法模型
逼近理想解排序法(technique for order preference by similarity to ideal solution,TOPSIS)是一種有效的多屬性決策方法,能對方案進行排序比較。該方法利用基于標準化后的原始數據矩陣,找出有限方案中的正理想解和負理想解,獲得某一方案與靠近理想解和遠離理想解之間的相對距離長度,從而得出某一方案與最理想解的相對接近程度,然后依據相對接近度的大小對評價結果進行排序,并以此來評價各方案的優劣。計算步驟如下。
1) 設有m個評價對象,n個評價指標,第i個評價對象第j項評價指標取值為aij,建立評價矩陣A;
2) 對決策矩陣進行規范化處理,構造規范化矩陣R,其中

7) 依據相對接近程度的大小對備選方案排序或選優,相對接近程度越大,說明備選方案相對越好。
5 算例分析
文中考慮報警時刻本艦與來襲魚雷的相對態勢進行作戰想定設計,然后進行ATTWS 全彈道仿真,最后利用仿真結果進行指標權重計算和ATTWS 作戰效能評估。
5.1 想定設計
采用全面設計方法,試驗因子和相應的因子水平如表1 所示,仿真想定如表2 所示。

表1 試驗因子設計Table 1 Design of test factors

表2 作戰想定設計Table 2 Design of operational scenarios
5.2 全彈道仿真結果
針對每個作戰想定進行100 次仿真,取100次仿真的平均值,由于篇幅限制,文中僅對部分作戰想定仿真結果進行顯示,如表3 所示。
5.3 指標權重計算
5.3.1 層次分析法權重計算結果
ATTWS 作戰效能遞階層次結構如圖2 所示,分為總目標層、單目標層和指標層3 個層級。邀請專家對每一層的各參數在上一層中所占的比重進行打分,得到總目標層-單目標層以及單目標層-指標層判斷矩陣如下

表3 全彈道仿真結果Table 3 Simulation results of whole trajectory

計算得到單目標層對總目標層的權重為λ0=(0.117 0,0.063 9,0.4916,0.332 8)T,且CR=0.0376<0.1;指標層對單目標層的權重依次為λ1=(0.75,0.25)T,λ2=(1)T,λ3=(0.572 6,0.262 9,0.043 8,0.120 7)T,λ4=(0.270 9,0.119 7,0.0418,0.567 7)T,且CR值均小于0.1。
從而求得各指標權重如表4 所示。
5.3.2 熵權法權重計算結果
通過如表3 所示的影響ATTWS 作戰效能的11 個指標定量結果,可直接得到決策矩陣X30×11。被評估的11 個指標中,除了最大旋回角速度外,其余均為成本型指標,對成本型指標和效益型指標分別進行歸一化處理,可得到指標屬性矩陣Y30×11。熵權法權重計算結果如表5 所示。
5.3.3 綜合權重計算結果
綜合權重計算結果如表6 所示。
5.4 效能評估結果
應用TOPSIS 法對30 個作戰想定進行作戰效能評估,結果如表7 所示。

表4 層次分析法指標權重計算結果Table 4 Index weight calculation results of analytic hierarchy process

表5 熵權法指標權重計算結果Table 5 Index weight calculation results of entropy weight method
5.5 結果分析
通過對5.3~5.4 節的結果進行分析,得到以下結論:

表6 綜合權重計算結果Table 6 Comprehensive weight calculation results

表7 作戰效能評估結果Table 7 Results of operational effectiveness evaluation
1) 層次分析法計算的權重中平臺效能指標和ATT 效能指標所占的權重分別為0.175 6 和0.824 4,由于該層指標是由行業內專家根據經驗計算得到的結果,且該層指標數量較少,專家經驗給予的結果比較準確,但首次捕獲目標時雷目距離這一指標只占到總權重的5.9%,根據前期工作經驗,是不符合實際情況的,這是由于第3層指標數量較多,主觀性判斷在此情況下會出現錯誤;
2) 熵權法計算的權重中首次捕獲目標雷目距離這一指標占到總權重的21.79%,這是由于該指標方案數據差異較大引起的,與前期工作中的結論也相吻合,但首次捕獲目標時間這一指標只占到總權重的9.3%,這與實際情況是不相符的,可見熵權法計算權重完全取決于各指標方案數據的變化差異程度,而不是各指標的實際重要程度,計算結果不能準確反映實際情況;
3) 應用文中方法計算的權重中首次捕獲目標時雷目距離這一指標的權重比層次分析法結果有所提高而比熵權法有所降低,首次捕獲目標時間這一指標的權重比層次分析法結果有所降低而比熵權法有所提高,這樣避免了由于人的主觀性導致最終結果不合理的情況和完全依賴指標方案數據變化差異引起的結果不準確的情況,在一定程度上做到了主觀和客觀的結合,與實際情況較為符合;
4) ATTWS 作戰效能按大小排序前三位分別為想定2、想定7 和想定21,對應的初始條件分別為(0°,2 000 m)、(20°,2 000 m)、(80°,1 000 m),說明當本艦與來襲魚雷相對方位較小或距離較小時發射ATT,ATTWS 作戰效能較好;
5) ATT 作戰效能按大小排序后三位分別為想定15、想定29 和想定26,對應的初始條件分別為(40°,5000 m)、(90°,4 000 m)和(90°,1 000 m),說明當來襲魚雷位于本艦正橫附近或相對距離較遠時發射ATT,ATTWS 作戰效能較差。
6 結束語
針對解析法在處理ATTWS 作戰效能問題時存在較難實現的問題,文中提出了更貼近實戰的ATTWS 作戰效能仿真評估方法。在構建ATTWS作戰效能指標體系的基礎上,將整體作戰效能與局部關鍵作戰規律聯系起來,通過對主觀賦權和客觀賦權優缺點的分析,研究了改進的主客觀賦權方法,通過對比分析,驗證了文中賦權方法的有效性和正確性。之后,根據ATTWS 作戰特點和作戰環境,選取了適用于ATTWS 的作戰效能評估算法,通過仿真實例,表明該方法可行有效。文中研究為基于戰場攻防對抗環境綜合評估ATTWS作戰效能提供了條件,可支撐不同戰場環境下的效能評估。
文中主要針對單雷作戰效能進行了研究,并未涉及到雙雷的作戰效能。因此,下一步工作將研究雙雷作戰效能,并與單雷作戰效能進行比較,以支撐ATT 的作戰使用。
相關文章導航
1.趙艾奇,王戈,孫建,等.基于目標舷別判斷的火箭助飛魚雷射擊方法[J].水下無人系統學報,2019,27(4).
2.劉海光,李偉,張永.遠程誘騙型UUV 掩護潛艇作戰效能建模與仿真[J].水下無人系統學報,2019,27(3).
3.沈亞東.關于建設“三位一體”水下戰裝備靶場的思考[J].水下無人系統學報,2017,25(2).
4.陳菁,何心怡,雷蕾,等.自導作用距離對輕型魚雷攻潛效能的影響[J].魚雷技術,2016,24(6).
5.董春鵬.基于水下信息系統的水中兵器作戰使用方法研究[J].魚雷技術,2016,24(4).
6.孫作瑋,陳航,黃青.基于雙模糊度層次分析法的反魚雷魚雷作戰效能指標權重確定[J].魚雷技術,2015,23(3).
7.崔滋剛,李志偉.基于蒙特卡洛法的潛射魚雷發現概率計算[J].魚雷技術,2014,22(4).
8.張遠彪,王昊,李春風,等.設計定型階段魚雷作戰試驗方案初探[J].魚雷技術,2014,22(2).
9.孫國振,謝志強.多魚雷與目標潛艇軟防御層對抗方法[J].魚雷技術,2013,21(5).
10.李永春,宋保維,姜軍.基于主成分分析方法的魚雷總體方案評定[J].魚雷技術,2013,21(2).
11.楊惠珍,朱遠軍,張建春,等.可組合的魚雷作戰效能評估仿真系統研究[J].魚雷技術,2013,21(2).
12.徐以成,孫明太,李居偉.反潛巡邏機空投魚雷攻潛作戰效能分析[J].魚雷技術,2012,20(4).
13.邢國強,閆雪,侯代文.基于驗前信息可信度的魚雷實航工作可靠度Bayes 融合評估方法[J].魚雷技術,2012,20(2).
14.馬亮,李偉,于大方.潛艇魚雷發射系統軍事需求及對策分析[J].魚雷技術,2011,19(2).
15.張棟,宋裕農.基于灰色理論的智能水雷作戰效能評估[J].魚雷技術,2011,19(1).
16.宋保維,李楠,毛昭勇.模糊層次分析法在魚雷作戰效能評估中的應用[J].魚雷技術,2010,18(4).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
