泵噴推進(jìn)器水動力尺度效應(yīng)數(shù)值仿真與分析
2020-11-10 02:09:50孫明宇董小倩楊晨俊
水下無人系統(tǒng)學(xué)報(bào) 2020年5期
孫明宇,董小倩,楊晨俊
(上海交通大學(xué) 海洋工程國家重點(diǎn)實(shí)驗(yàn)室,上海,200240)
0 引言
泵噴推進(jìn)器是一種低噪聲推進(jìn)裝置,主要應(yīng)用于潛艇、魚雷等水下航行器。泵噴推進(jìn)器采用導(dǎo)管來屏蔽部分輻射噪聲,導(dǎo)管一般采用減速型以改善轉(zhuǎn)子的空泡性能,另外還通過轉(zhuǎn)子與定子的配合來提高效率。泵噴推進(jìn)器結(jié)構(gòu)復(fù)雜、設(shè)計(jì)難度較高。準(zhǔn)確預(yù)報(bào)泵噴推進(jìn)器的水動力性能,是開展設(shè)計(jì)的重要基礎(chǔ)。
有關(guān)泵噴推進(jìn)器,公開的研究資料較少。Suryanarayana 等[1-2]針對泵噴推進(jìn)的軸對稱載體在風(fēng)洞和空泡水筒中進(jìn)行了試驗(yàn),驗(yàn)證了后置定子能夠吸收轉(zhuǎn)子的旋轉(zhuǎn)能量、提高推進(jìn)器效率的優(yōu)點(diǎn)。劉占一等[3]對泵噴推進(jìn)器水動力性能進(jìn)行了計(jì)算流體力學(xué)(computational fluid dynamics,CFD)預(yù)報(bào),計(jì)算結(jié)果與實(shí)驗(yàn)結(jié)果吻合較好;潘光等[4]針對泵噴推進(jìn)的無人水下航行器進(jìn)行了定常流CFD 仿真,給出了流場信息,數(shù)值驗(yàn)證了泵噴推進(jìn)器效率較高的優(yōu)點(diǎn)。與螺旋槳一樣,泵噴推進(jìn)器通常也是通過模型試驗(yàn)來預(yù)報(bào)實(shí)尺度推進(jìn)器的性能,所謂預(yù)報(bào)實(shí)際上就是對水動力的尺度效應(yīng)進(jìn)行修正。但是,實(shí)尺度泵噴推進(jìn)器的性能預(yù)報(bào)方法尚有待研究。
關(guān)于螺旋槳的尺度效應(yīng),1978 年國際拖曳水池 會 議(International Towing Tank Conference,ITTC)給出的預(yù)報(bào)方法[5]已經(jīng)獲得了廣泛的應(yīng)用。不過,近10 年來不少研究表明ITTC 方法存在局限性。Kawamura 等[6]研究表明,與雷諾平均Navier-Stokes (Reynolds-averaged Navier-Stokes,RANS) 方程計(jì)算結(jié)果相比,ITTC 方法低估了螺旋槳推力和效率的尺度效應(yīng),尤其是對于大側(cè)斜槳更為嚴(yán)重。Krasilnikov 等[7]也通過RANS 計(jì)算,表明側(cè)斜的確會對尺度效應(yīng)產(chǎn)生影響。Müller 等[8]則是系列變化槳葉幾何,基于RANS 計(jì)算給出了尺度效應(yīng)的修正公式,其中考慮了槳葉推力負(fù)荷以及側(cè)斜等因素的影響。另一方面,ITTC 方法也不適用于某些特殊的推進(jìn)器形式,對此,目前一般借助CFD 方法進(jìn)行尺度效應(yīng)的數(shù)值預(yù)報(bào)。例如,Sánchez-Caja 等[9]通過RANS 計(jì)算進(jìn)行尾流收縮葉梢有載(contracted and loaded tip,CLT)螺旋槳端板的優(yōu)化;Krasilnikov 等[10]和Oh 等[11]分別開展了導(dǎo)管槳和舵球的尺度效應(yīng)計(jì)算研究;Dong 等[12]對Kappel 槳尺度效應(yīng)的RANS 計(jì)算結(jié)果表明,在尺度效應(yīng)導(dǎo)致的實(shí)槳效率增加中,推力和扭矩的貢獻(xiàn)是相當(dāng)?shù)模鶕?jù)ITTC 方法則主要來自扭矩的貢獻(xiàn),原因是ITTC 方法未考慮尺度效應(yīng)引起的槳葉壓力分布的變化。
綜上可見,粘流CFD 計(jì)算是當(dāng)前研究推進(jìn)器尺度效應(yīng)的主要方法。但關(guān)于泵噴推進(jìn)器尺度效應(yīng)的研究幾乎未見發(fā)表,尺度效應(yīng)對各部件影響、流動機(jī)理相關(guān)內(nèi)容有待考察。文中通過求解RANS 方程,開展模型尺度及實(shí)尺度泵噴推進(jìn)器的敞水性能仿真,研究尺度效應(yīng)對泵噴推進(jìn)器水動力性能的影響,為預(yù)報(bào)實(shí)尺度推進(jìn)器的敞水性能提供參考。
基于RANS 數(shù)值仿真,首先在模型尺度開展泵噴推進(jìn)器敞水性能的網(wǎng)格收斂性研究,并與試驗(yàn)結(jié)果進(jìn)行比較,以建立可靠的計(jì)算方法;然后開展模型尺度和實(shí)尺度推進(jìn)器的水動力性能計(jì)算,分析考察尺度效應(yīng)對推進(jìn)器各部件水動力及葉梢流動的影響,加深對泵噴推進(jìn)器尺度效應(yīng)機(jī)理的理解。
1 數(shù)值仿真方法
計(jì)算對象為前置定子的泵噴推進(jìn)器,其主要參數(shù)如表1 所列,三維幾何如圖1 所示。

圖1 泵噴推進(jìn)器幾何模型Fig.1 Geometric model of the pump-jet propulsor
數(shù)值仿真在敞水條件下進(jìn)行。如圖2 所示,計(jì)算域?yàn)閳A柱體,直徑為10D,長度為20D,D為轉(zhuǎn)子直徑;泵噴推進(jìn)器軸線與計(jì)算域軸線重合,轉(zhuǎn)子盤面位于計(jì)算域長度方向的中點(diǎn)處。流體沿長度方向從左側(cè)進(jìn)入計(jì)算域。

圖2 計(jì)算域Fig.2 Computational domain
計(jì)算域分為外域、內(nèi)域、定子域和轉(zhuǎn)子域4部分,其中外域?yàn)檎麄€(gè)計(jì)算域挖去包含推進(jìn)器的小圓柱體后的剩余部分。如圖3 所示,在小圓柱體內(nèi)部進(jìn)一步切出包含定子和轉(zhuǎn)子的回轉(zhuǎn)體域,分別稱為定子域和轉(zhuǎn)子域,它們的側(cè)向邊界均為導(dǎo)管內(nèi)壁面的一部分;小圓柱體挖去定子域和轉(zhuǎn)子域后的剩余部分稱為內(nèi)域。轉(zhuǎn)子域定義在固定于轉(zhuǎn)子的旋轉(zhuǎn)坐標(biāo)系中,其余子域定義在固定坐標(biāo)系中。如圖2 所示,計(jì)算域左側(cè)邊界及側(cè)面(圓柱面)邊界設(shè)為速度入口,速度大小等于推進(jìn)器進(jìn)速,方向沿推進(jìn)器軸線從左向右;右側(cè)邊界設(shè)為壓力出口,表壓設(shè)置為0;推進(jìn)器表面設(shè)為無滑移面。計(jì)算域外邊界的湍流強(qiáng)度設(shè)為2%,湍流粘度比設(shè)為2。

圖3 內(nèi)域及其劃分Fig.3 Division of the inner domain
計(jì)算域采用分塊的結(jié)構(gòu)化六面體網(wǎng)格進(jìn)行離散,網(wǎng)格劃分采用ICEM CFD 16.0 軟件。轉(zhuǎn)子葉片周圍采用C 網(wǎng)格,相鄰葉片間采用L 網(wǎng)格(見圖4);定子葉片周圍采用C 網(wǎng)格;沿轉(zhuǎn)子及定子徑向以及轉(zhuǎn)子葉梢間隙內(nèi)均采用H 網(wǎng)格(見圖5)。

圖4 轉(zhuǎn)子葉片周圍網(wǎng)格拓?fù)銯ig.4 Grid topology around a rotor blade

圖5 葉梢間隙內(nèi)網(wǎng)格拓?fù)銯ig.5 Grid topology in the tip clearance
數(shù)值計(jì)算在STAR-CCM+12.02 軟件中進(jìn)行。采用SSTk-ω兩方程模型模擬湍流,全y+壁面處理來模擬近壁面流動,控制方程各項(xiàng)均選用2 階格式進(jìn)行離散。需要說明的是,由于轉(zhuǎn)子與定子的相互作用,即使在敞水中泵噴推進(jìn)器的水動力也會隨時(shí)間脈動。但是,研究中計(jì)算對象為7 葉轉(zhuǎn)子和5 葉定子的組合,這時(shí)推力和扭矩的最低脈動頻率為軸頻的35 倍,脈動幅值通常為時(shí)間平均值的千分位量級,因此,忽略非定常影響,采用準(zhǔn)定常模型進(jìn)行計(jì)算。
2 算例與分析
2.1 網(wǎng)格收斂性考察
為了獲得可靠的計(jì)算結(jié)果,首先考察敞水性能計(jì)算方法的網(wǎng)格收斂性。定義網(wǎng)格細(xì)化比rG=h3/h2=h2/h1,其中h3、h2和h1分別代表粗網(wǎng)格、中網(wǎng)格和細(xì)網(wǎng)格的尺度,按rG=對模型尺度和實(shí)尺度分別生成了3 套計(jì)算網(wǎng)格。首先生成模型尺度的網(wǎng)格,然后先將模型尺度網(wǎng)格按12∶1的比例放大到實(shí)尺度,再根據(jù)y+的要求調(diào)整壁面附近網(wǎng)格的離壁高度,得到實(shí)尺度計(jì)算網(wǎng)格。表2 給出了計(jì)算網(wǎng)格的主要參數(shù),圖6 為粗、中、細(xì)網(wǎng)格的比較。表3 給出了模型尺度和實(shí)尺度轉(zhuǎn)子葉片y+的平均值,由于J變化時(shí)轉(zhuǎn)速不變,不同J的雷諾數(shù)相差不大,所以y+也比較接近。為了正確模擬層流及邊界層轉(zhuǎn)捩,模型尺度y+~1;實(shí)尺度則假定全湍流,y+~50。
表4 給出了模型尺度三套網(wǎng)格的計(jì)算結(jié)果及其與試驗(yàn)結(jié)果的比 較,其中KTC、KQC分別為泵噴推進(jìn)器總推力系數(shù)和轉(zhuǎn)子扭矩系數(shù)的計(jì)算值,KTE、KQE為對應(yīng)的試驗(yàn)值;下標(biāo)T、Q分別表示推力、扭矩;ET、EQ分別表示推力、扭矩計(jì)算值相對于試驗(yàn)值的誤差。表4 中的試驗(yàn)值來自上海交通大學(xué)空泡水筒中開展的模型試驗(yàn)。根據(jù)模型試驗(yàn)結(jié)果,J=1.071 已超過了最高效率對應(yīng)的J值,因此設(shè)計(jì)工況點(diǎn)在計(jì)算工況范圍內(nèi)。表4 的結(jié)果表明,在不同的載荷(即進(jìn)速系數(shù))下,模型尺度推進(jìn)器的推力、扭矩計(jì)算結(jié)果均隨著網(wǎng)格加密而收斂,中網(wǎng)格與細(xì)網(wǎng)格的計(jì)算結(jié)果相差在0.9%以內(nèi);計(jì)算值與試驗(yàn)值相比,除重載工況(J=0.337)及部分工況的粗網(wǎng)格外,推力系數(shù)誤差在4%以內(nèi),扭矩系數(shù)誤差在5%以內(nèi),對于泵噴這樣的組合式推進(jìn)器,計(jì)算與試驗(yàn)的吻合程度較好。

表2 計(jì)算網(wǎng)格主要參數(shù)Table 2 Main parameters of computational grids

表3 轉(zhuǎn)子葉片表面y+平均值Table 3 Averaged values of y+ on rotor blade surfaces
表5 給出了實(shí)尺度3 套網(wǎng)格的計(jì)算結(jié)果,其中εT、εQ表示粗網(wǎng)格與中網(wǎng)格或中網(wǎng)格與細(xì)網(wǎng)格計(jì)算結(jié)果之間的相對差,其余符號定義與表4 相同。與模型尺度一樣,實(shí)尺度推進(jìn)器的推力、扭矩計(jì)算結(jié)果也都隨著網(wǎng)格加密而收斂,中網(wǎng)格與細(xì)網(wǎng)格的計(jì)算結(jié)果相差在0.7%以內(nèi),與模型尺度的結(jié)果很接近,表明計(jì)算方法在實(shí)尺度也是合理可靠的。

圖6 粗(a)、中(b)、細(xì)(c)網(wǎng)格對比Fig.6 Comparison of coarse (a),medium (b),and fine (c) grids

表4 模型尺度網(wǎng)格收斂性計(jì)算與仿真結(jié)果Table 4 Computation and simulation results of grid convergence for model scale

表5 實(shí)尺度網(wǎng)格收斂性計(jì)算與仿真結(jié)果Table 5 Computation and simulation results of grid convergence for full scale
2.2 尺度效應(yīng)分析
綜合考慮模型尺度與實(shí)尺度的收斂情況,選用中網(wǎng)格的計(jì)算結(jié)果進(jìn)行水動力尺度效應(yīng)的分析。表6 與圖7 給出了模型尺度與實(shí)尺度RANS仿真結(jié)果的比較,考察尺度效應(yīng)對泵噴推進(jìn)器各部件推力、扭矩及效率的影響。與模型尺度相比,實(shí)尺度推進(jìn)器的總推力系數(shù)KTC增大10%左右,效率η0提高8%左右,但是轉(zhuǎn)子扭矩系數(shù)KQC也增大了2%左右。敞開式螺旋槳的尺度效應(yīng)使得實(shí)槳效率增高的原因主要是實(shí)槳扭矩系數(shù)的降低,近年來一些數(shù)值研究發(fā)現(xiàn)推力對效率增高也有貢獻(xiàn),但至多與扭矩貢獻(xiàn)度相當(dāng)[12]。根據(jù)文中數(shù)值結(jié)果,實(shí)尺度泵噴推進(jìn)器的效率增高主要源自推力系數(shù)的增高,而扭矩對效率增高的貢獻(xiàn)為負(fù),這與敞開式螺旋槳的尺度效應(yīng)有明顯的差別。

表6 模型尺度與實(shí)尺度泵噴推進(jìn)器各部件水動力的RANS 仿真結(jié)果Table 6 RANS simulation results of hydrodynamic forces on different parts of the pump-jet propulsor at model-and full-scale
進(jìn)一步分析轉(zhuǎn)子、定子及導(dǎo)管對推力增加的貢獻(xiàn)度,由于J=0.337 的結(jié)果與其余工況相差較大,這里對該工況不作分析。從表6 及圖7 可以看出: 推進(jìn)器總推力系數(shù)的增加來自轉(zhuǎn)子KTR和導(dǎo)管KTD,實(shí)尺度轉(zhuǎn)子和導(dǎo)管的推力系數(shù)增量分別約為總推力系數(shù)增量的86%和20%。模型尺度和實(shí)尺度定子KTS都產(chǎn)生阻力(負(fù)推力);因?yàn)閷?shí)尺度轉(zhuǎn)子推力系數(shù)增高、抽吸作用加強(qiáng),導(dǎo)致實(shí)尺度定子的阻力系數(shù)比模型尺度高,阻力系數(shù)的增量約為總推力系數(shù)增量的5%,因此定子對尺度效應(yīng)的貢獻(xiàn)較小。
就推進(jìn)器各部件及整體的實(shí)尺度推力系數(shù)相對于模型尺度推力系數(shù)的變化量而言,轉(zhuǎn)子、定子及推進(jìn)器整體都在10%左右,而導(dǎo)管則高達(dá)24%以上,表明尺度效應(yīng)對導(dǎo)管表面流態(tài)的影響很大。

圖7 模型尺度與實(shí)尺度泵噴推進(jìn)器各部件水動力對比Fig.7 Comparison of hydrodynamic forces on different parts of the pump-jet propulsor at model-and full-scale
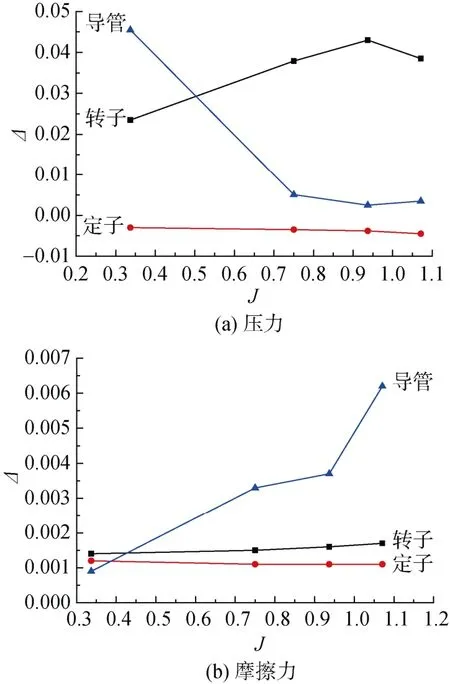
圖8 壓力和摩擦力對推進(jìn)器各部分推力尺度效應(yīng)對比Fig.8 Comparison of pressure and frictional forces to scale effect on thrust coefficients of different parts of the pump-jet propulsor
圖8 進(jìn)一步考察壓力和摩擦力成分對推進(jìn)器各部分推力尺度效應(yīng)的貢獻(xiàn),其中縱軸Δ表示實(shí)尺度推力系數(shù)S和模型尺度推力系數(shù)M之差。可以看出: 對轉(zhuǎn)子和導(dǎo)管而言,壓力和摩擦力對實(shí)尺度推力的增大都是做正貢獻(xiàn)的,而且是以壓力的貢獻(xiàn)為主;對定子而言,壓力的貢獻(xiàn)為負(fù),摩擦力的貢獻(xiàn)為正,但仍是壓力的貢獻(xiàn)為主,所以定子對推力增大的貢獻(xiàn)為負(fù)。
圖9 給出J=0.75 時(shí)模型尺度與實(shí)尺度轉(zhuǎn)子葉片表面的限界流線對比,圖10 是圖9 中標(biāo)出的4個(gè)剖面處實(shí)尺度壓力系數(shù)CPs與模型尺度壓力系數(shù)CPm之差ΔCP的對比,以考察尺度效應(yīng)對轉(zhuǎn)子葉片表面流態(tài)和壓力分布的影響。分析如下。
1) 比較圖9(a)和圖9(b),可以發(fā)現(xiàn): 在模型尺度,從葉根到0.7R,隨邊附近存在明顯的流動分離,而在實(shí)尺度,分離區(qū)域明顯減少至從葉根到0.5R范圍,這對實(shí)尺度的效率提高是有貢獻(xiàn)的。
2) 比較模型尺度和實(shí)尺度葉梢附近的流線,可以發(fā)現(xiàn): 在實(shí)尺度,從葉面向葉背的二次流動明顯比模型尺度弱,因此推測實(shí)尺度葉梢泄漏渦強(qiáng)度有所減弱。


圖9 模型尺度與實(shí)尺度轉(zhuǎn)子葉片表面限界流線對比(J=0.75)Fig.9 Comparison of limiting streamlines on the blade surfaces of model-and full-scale rotors (J=0.75)
3) 圖10 表明,葉背的ΔCP基本為負(fù)值,而葉面的ΔCP基本為正值,表明實(shí)尺度葉背壓力系數(shù)比模型尺度低、實(shí)尺度葉面壓力系數(shù)比模型尺度高,因此實(shí)尺度葉剖面壓差(葉面壓力與葉背壓力之差)比模型尺度大,所以實(shí)尺度轉(zhuǎn)子的推力比模型尺度大,這與圖8(a)的結(jié)果是一致的。定義攻角為來流與剖面鼻尾線的夾角,且葉面為迎流面時(shí)攻角為正,與機(jī)翼相似,槳葉剖面的正攻角越大,壓差及升力就越大。因此實(shí)尺度壓差增大表明實(shí)尺度轉(zhuǎn)子的攻角比模型尺度大。
用與螺旋槳共軸的一系列圓柱面將槳葉分割為若干條帶,條帶中心半徑r近似作為推力、扭矩的作用半徑,按下式定義條帶的平均推力系數(shù)σT和平均扭矩系數(shù)σQ

圖10 模型尺度與實(shí)尺度轉(zhuǎn)子葉片表面壓力分布對比(J=0.75)Fig.10 Comparison of pressure distributions on the blade surfaces of model-and full-scale rotors(J=0.75)

式中:Tb(r)、Qb(r)及Ab(r)分別為中心半徑為r、徑向?qū)挾葹棣的槳葉條帶的推力、扭矩及表面積;n和D分別為轉(zhuǎn)子的轉(zhuǎn)速和直徑;ρ為水的密度。
圖11 是模型尺度與實(shí)尺度槳葉推力分布σT和扭矩分布σQ的比較。

圖11 模型尺度與實(shí)尺度泵噴推進(jìn)器推力分布和扭矩分布對比Fig.11 Comparison of thrust distribution and torque distribution at model-and full-scale propulsor
用下標(biāo)s和m分別表示實(shí)尺度和模型尺度,圖11 顯示σTs>σTm、σ Qs>σQm,表明尺度效應(yīng)導(dǎo)致實(shí)尺度轉(zhuǎn)子的來流攻角增大,從而使得推力系數(shù)和扭矩系數(shù)同時(shí)增高;另一方面,σ Ts/σTm>σQs/σQm,最可能的原因就是實(shí)尺度定子產(chǎn)生的預(yù)旋流(與轉(zhuǎn)子轉(zhuǎn)向相反)比模型尺度定子要強(qiáng),從而導(dǎo)致實(shí)尺度轉(zhuǎn)子的效率增高。考慮上文分析中的結(jié)論2),結(jié)合圖11 中在內(nèi)半徑處扭矩基本一致,推力均勻增大,而在外半徑處扭矩與推力均大幅增大的現(xiàn)象,推測實(shí)尺度下葉梢泄漏渦強(qiáng)度的減弱對轉(zhuǎn)子推力分布沿徑向不均勻增加以及轉(zhuǎn)子抽吸作用與定子預(yù)旋流的耦合變化有影響。
3 結(jié)論
通過求解RANS 方程,開展了泵噴推進(jìn)器模型尺度和實(shí)尺度敞水性能的仿真,考察了計(jì)算模型的網(wǎng)格收斂性以及與試驗(yàn)值的比較誤差,驗(yàn)證了計(jì)算方法的可靠性;基于數(shù)值結(jié)果對泵噴推進(jìn)器的水動力尺度效應(yīng)進(jìn)行了分析。主要結(jié)論如下:
1) 該類型泵噴推進(jìn)器各部件的尺度效應(yīng)差別較大,導(dǎo)致尺度效應(yīng)對水動力的影響比較復(fù)雜。實(shí)尺度推進(jìn)器的推力系數(shù)和效率均高于模型尺度,這與螺旋槳相同,但效率的增量比螺旋槳大得多;實(shí)尺度轉(zhuǎn)子的扭矩系數(shù)也高于模型尺度,這與螺旋槳相反,分析發(fā)現(xiàn)其原因是實(shí)尺度轉(zhuǎn)子的攻角比模型尺度增大。
2) 該類型泵噴推進(jìn)器實(shí)尺度效率的提高,主要是因?yàn)橥屏υ龃螅屏υ龃笾饕獊碜赞D(zhuǎn)子的貢獻(xiàn),其次是導(dǎo)管的貢獻(xiàn)。值得注意的是,導(dǎo)管推力的增大幅度遠(yuǎn)高于轉(zhuǎn)子,表明尺度效應(yīng)對導(dǎo)管的影響更大。
3) 對于所有部件,實(shí)尺度的摩擦力均小于模型尺度的,這是因?yàn)槔字Z數(shù)較高,這一點(diǎn)與螺旋槳相同。但是,尺度效應(yīng)對壓力的影響比較復(fù)雜,對于文中算例,壓力變化導(dǎo)致轉(zhuǎn)子和導(dǎo)管的推力增高,但同時(shí)也導(dǎo)致定子的阻力增高。
對泵噴推進(jìn)器而言,尺度效應(yīng)引起的攻角變化可能與葉片表面邊界層厚度的變化有關(guān),也可能與導(dǎo)管負(fù)荷的變化有關(guān),但這2 個(gè)因素哪一個(gè)為主,有待進(jìn)一步研究。
相關(guān)文章導(dǎo)航
1.崔祚,姜洪州.擺動推進(jìn)魚類魚體波復(fù)模態(tài)分解及其特性分析[J].水下無人系統(tǒng)學(xué)報(bào),2020,28(2).
2.趙曉瑞,于洋,李真山,等.基于余弦前饋的重復(fù)運(yùn)動控制算法在水下仿生推進(jìn)系統(tǒng)中的應(yīng)用[J].水下無人系統(tǒng)學(xué)報(bào),2020,28(2).
3.孫芹東,蘭世泉,王超,等.水下聲學(xué)滑翔機(jī)研究進(jìn)展及關(guān)鍵技術(shù)[J].水下無人系統(tǒng)學(xué)報(bào),2020,28(1).
4.張珂,李鵬,顏開,等.空化器操縱過程水動力試驗(yàn)方法[J].水下無人系統(tǒng)學(xué)報(bào),2019,27(4).
5.秦玉峰,齊占峰,彭家忠,等.小型長航程AUV 續(xù)航力分析[J].水下無人系統(tǒng)學(xué)報(bào),2019,27(3).
6.張凱,尹韶平,曹小娟,等.魚雷動力及推進(jìn)系統(tǒng)簡化建模與振動分析[J].水下無人系統(tǒng)學(xué)報(bào),2019,27(2).
7.范增,王揚(yáng)威,劉凱,等.仿生機(jī)器魚胸鰭波動與擺動融合推進(jìn)機(jī)制建模及實(shí)驗(yàn)研究[J].水下無人系統(tǒng)學(xué)報(bào),2019,27(2).
8.沈新蕊,王延輝,楊紹瓊,等.水下滑翔機(jī)技術(shù)發(fā)展現(xiàn)狀與展望[J].水下無人系統(tǒng)學(xué)報(bào),2018,26(2).
9.段勇,郭君,周凌波.隔振技術(shù)在水下航行器推進(jìn)軸系振動控制中的應(yīng)用[J].水下無人系統(tǒng)學(xué)報(bào),2018,26(1).
10.段勇,郭君,周凌波水下航行器尾段振動激勵(lì)源特性試驗(yàn)研究[J].水下無人系統(tǒng)學(xué)報(bào),2017,25(5).
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
核科學(xué)與工程(2021年4期)2022-01-12 06:30:26
今日農(nóng)業(yè)(2020年19期)2020-12-14 14:16:52
小學(xué)生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)物理·高中(2016年12期)2017-04-22 11:53:03
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30
