基于COMSOL 的主動式聲誘餌仿真系統
2020-11-10 02:09:54唐麗媛汪海濤
水下無人系統學報 2020年5期
唐麗媛,汪海濤,王 斌
(1.上海交通大學 海洋工程國家重點實驗室,上海,200240;2.哈爾濱工程大學 水聲技術重點實驗室,黑龍江 哈爾濱,150001;3.中國船舶重工集團公司 第726 研究所,上海,201108)
0 引言
目前反魚雷技術主要集中在自我保護和軟殺傷2 個方面。其中聲誘餌是各國海軍廣泛采用的武器裝備之一[1-2]。
聲誘餌按工作方式分為主動式和被動式2 種,主動式聲誘餌通過模擬潛艇的散射特性應答敵方的搜尋信號;被動式聲誘餌通過連續發出與潛艇輻射噪聲相似的寬帶噪聲,達到誘騙敵方聲吶的目的[3]。聲誘餌按運動方式分為拖拽式、自航式和懸浮式,懸浮式聲誘餌由共軸的發射陣、接收陣、聲障板以及電子艙組成,其中,電子艙為耐壓殼體結構,用于連接發射接收裝置,儲存參與工作的電子設備[4]。
為了對抗智能化魚雷,現代主動式聲誘餌通常采用邊收邊發工作模式[5],即發射信號的同時不關閉接收機,該技術的關鍵在于降低發射信號串漏對接收信號的影響。向大威等[6]指出邊收邊發模式下聲串漏是由發射-接收端直接聲串漏和海底/海面反射引起的間接聲串漏兩部分組成。王自娟[7]、王守義[5]討論了利用矢量傳感器的組合指向性抑制聲串漏。吳培榮[8]分析了發射/接收的指向性和干擾抵消算法對聲串漏的抑制效果。王敏慧等[9]定量分析了圓柱換能器軸向波束隨聲障板安裝距離和直徑的變化。徐盛瀛等[10]討論了聲誘餌電子艙材料、結構及其與發射點距離對接收隔離度的影響。上述研究對聲誘餌串漏抑制具有重要的指導意義,但不具備系統仿真分析能力。
董陽澤[11]、苑秉成等[12]基于Matlab、VC 平臺研制了聲誘餌仿真系統。董陽澤等[13]對水聲對抗仿真系統的設計思路和具體的實施方案進行了闡述。以上仿真系統的重點為聲誘餌的防御策略,對陣元域信號仿真關注較少。
針對以上問題,文中設計了一套邊收邊發工作模式的主動式聲誘餌仿真系統。該系統借助多物理場耦合數值仿真軟件COMSOL Multiphysics仿真電子艙聲振耦合的聲場,將串漏反饋模型和時域波形仿真等算法通過其內置的APP 開發器在不同的模塊中實現,完成了陣元域接收/發射信號完整仿真流程;同時,提供了包括模擬潛艇回波功能的信號處理模塊,可以對信號進行分析;采用模塊化設計,獨立性高。最后分析了電子艙引起的發射/接收聲場畸變以及邊收邊發模式下串漏引起的器材增益變化。
1 仿真原理與系統構成
1.1 仿真原理
主動式聲誘餌工作原理如圖1 所示。

圖1 聲誘餌工作原理圖Fig.1 Principle of acoustic bait
由主動聲吶發射探測信號,經過海洋信道傳播至聲誘餌,接收陣將入射聲波及其在聲隔離障板和電子艙上的散射聲波一同轉換為電信號,經接收機、信號處理機以及發射機濾波、放大,驅動發射基陣將電信號轉換為聲波,與接收過程類似發射聲波在聲隔離障板和電子艙上發生散射,經過海洋信道傳播至主動聲吶。
將包含聲隔離障板和電子艙散射的海洋信道聲傳播作為一個線性系統考慮,并根據Ignenito近似[14]忽略聲誘餌與海面/海底之間多次散射,聲誘餌接收陣輸出電壓信號可表示為

式中:S(ω)為主動聲吶發射信號頻譜;θi、G(θi)和φ(θi)分別為本征聲線入射角、幅度和相位;H1(ω,θi)為θi方向單位幅度平面波激勵自由場環境下聲誘餌接收陣輸出復電壓;n(t)為海洋環境噪聲激勵下輸出電壓。
主動聲吶接收應答信號可表示為

式中:Z(ω)為輸出機輸出電壓頻譜;H2(ω,θ i)為自由場環境下單位電壓激勵下聲誘餌接發射陣在θi方向和距離歸一化后的復聲壓。
傳統存儲轉發模式時,輸出機輸出電壓z(t)與接收機輸入電壓y(t)的頻譜滿足

其中,H(ω)為存儲轉發模式下聲誘餌接收機輸入電壓與發射機輸出電壓之間的傳遞函數,為已知量。
在邊收邊發工作模式下,發射陣發射信號經接收陣接收后同時轉發,形成一個典型反饋閉環系統[15],如圖2 所示。

圖2 串漏反饋模型Fig.2 Model of cross-leak feedback
此時接收機輸入電壓與發射機輸出電壓之間傳遞函數由H(ω)變為

其中,H3(ω)為自由場環境單位聲壓驅動下發射陣發射聲波時接收陣輸出電壓的傳遞函數。
由此可知聲誘餌陣元域信號仿真流程如下:1) 根據海洋環境參數、主動聲吶/聲誘餌深度和水平距離計算本征聲線入射角、幅度與相位;2) 根據聲隔離障板、電子艙結構與材料參數以及發射/接收陣配置參數(形狀、尺度以及壓電響應或靈敏度)計算傳遞函數;3) 根據接收機輸入電壓與發射機輸出電壓之間的傳遞函數,計算接收機輸入電壓以及發射陣應答信號時域波形。
1.2 系統構成
針對上述仿真流程,該系統采用了模塊化設計,模塊間采用共享文件的方式通信。系統結構如圖3 所示。

圖3 系統結構Fig.3 System structure
各模塊具體功能如下。
1) 模型構建模塊: 具備豐富的CAD 接口,支持用戶導入待計算的聲誘餌模型,并同時展示該模型二維剖面圖和三維立體圖,輸出二維模型。
2) 海洋環境模塊: 用于生成主動聲吶信號和模擬海洋信道多途效應、背景噪聲和混響。基于射線聲學計算主動聲吶與聲誘餌之間的本征聲線入射角、幅度和相位,同時根據Wenz 譜[16]和單元散射模型[17]模擬海洋環境噪聲和混響時域波形。
3) 聲學有限元模塊: 根據海洋環境模塊輸出的本征聲線入射角,計算自由場情況下各個角度聲波入射時考慮誘餌電子艙的聲場傳遞函數,包含發射、接收和串漏傳遞函數。為了提高計算速度,系統采用了基于軸向諧波展開的有限元方法[18]計算傳遞函數,計算速度與效率相對于三維有限元方法具有顯著優勢[18]。
4) 接收機模塊: 根據海洋環境模塊和聲學有限元模塊計算得到的本征聲線和傳遞函數,應用式(1)計算接收機輸入電壓時域波形。
5) 發射機模塊: 根據海洋環境模塊和聲學有限元模塊計算得到的本征聲線和傳遞函數,結合式(2)、式(3)和式(5)計算存儲轉發和邊收邊發2種模式下的主動聲吶應答信號時域波形。
6) 信號處理模塊: 對仿真設計的效果進行評估,具體通過對式(5)計算得到的應答信號進行信號處理和與模擬潛艇回波對比進行評估。信號處理部分采用較為成熟的頻譜分析,匹配濾波和包絡檢測以及時頻分析方法處理聲吶應答信號。
模擬潛艇回波部分,設包含潛艇目標散射聲場傳遞函數為Hv,則模擬潛艇的回波為

由于通常要模擬的潛艇等目標尺寸很大,主要為幾何回波,若采用有限元軟件計算,對計算機的要求很高,計算速度較慢,因此采用板塊元方法[19]快速計算Hv,即

其中,αij是第(i,j)個板塊元的法向與入射和反射方向的夾角。
2 仿真系統實現
2.1 硬件與平臺配置
2.1.1 集群系統硬件資源
該系統配置集群系統包含4 臺曙光C500-3K刀片服務器,每臺服務器配置2 個型號為Intel(R)Xeon(R) CPU E5-2695 v4@2.10 GHz 的處理器,每個處理器核心數為18 個。服務器內存128 GB。數據均置于本地硬盤中存儲,其中3 個節點的容量為2 479 GB,第4 個節點容量為479 GB。各節點通過千兆有線局域網連接,通過作業配置調度程序PBS (portable batch system)實現仿真計算程序的協同處理。
2.1.2 集群軟件配置
各節點安裝的操作系統為Linux,其中節點1為主節點,安裝的軟件為COMSOL Server 5.3a。
COMSOL Server 是由COMSOL 公司開發的專業平臺[20],用于部署和運行已構建好的仿真模塊,界面內置多種管理工具,可以管理已上傳APP 的訪問權限、用戶帳戶、用戶組以及多處理器的使用情況等。通過COMSOL Server 內置的集群計算技術部署各模塊,使其能夠在集群架構中運行。系統主界面如圖4 所示。

圖4 系統主界面Fig.4 Main system interface
2.1.3 模塊開發方法
各模塊均采用COMSOL Multiphysics 內置的APP 開發器進行開發。APP 開發器不僅可以通過運行方法對有限元仿真進行控制,還支持嵌入算法、定制APP 的界面、控制輸入和輸出等操作。
該系統使用Java 語言在APP 開發器中實現。首先,將常用的數據處理算法如插值函數、快速傅立葉變換等采用面向對象的方式封裝成應用程序接口(application programming interface,API),然后在方法中進行API 調用,最后設計界面。通過按鈕關聯方法,得到具有特定功能的模塊,各模塊通過維護公共的文件進行信息傳遞。
2.2 參數設計與界面顯示
1) 海洋環境模塊
具體設置如圖5 所示。左側為海洋環境參數設置部分,包含主動聲吶發射信號、發射指向性、海洋噪聲譜以及信道參數等;右側為圖形展示部分,結果圖分別為主動聲吶發射信號、海洋環境噪聲信號和海洋混響信號。
2) 聲學有限元模塊
具體設置如圖6 所示。左側為參數設置部分,主要包含導入電子艙計算模型,發射接收陣陣元類型、位置及靈敏度,各區域材料以及計算頻率范圍等;右側為圖形展示部分,其中,第1 列為計算模型和計算后聲場,第2 列3 幅圖分別為考慮電子艙時的接收傳遞函數、發射傳遞函數和串漏傳遞函數的結果。
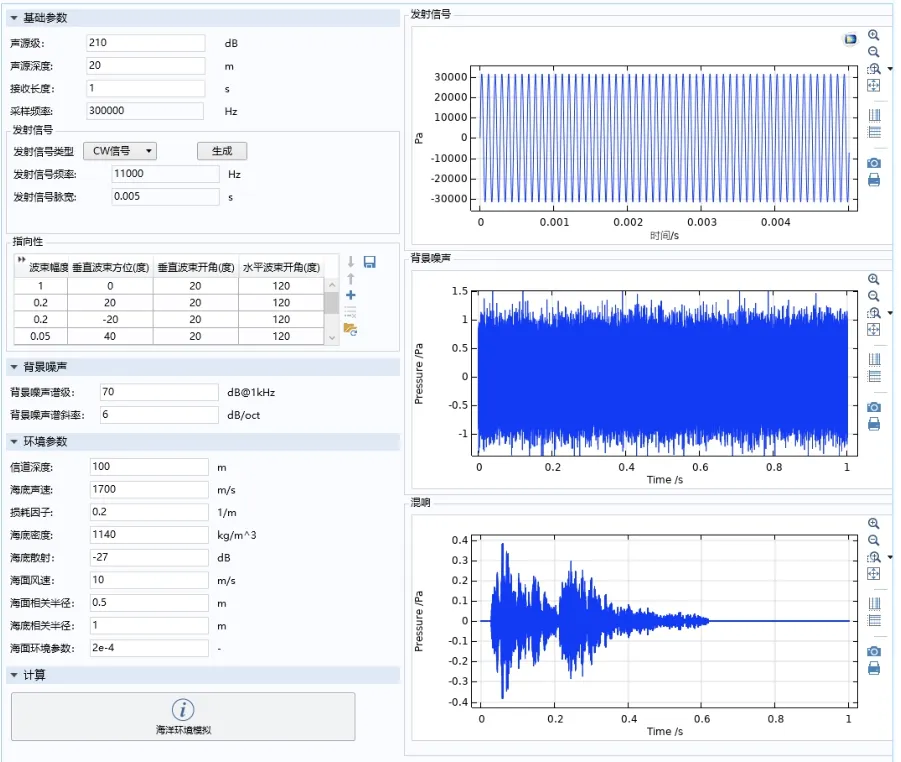
圖5 海洋環境模塊Fig.5 Marine environment module

圖6 聲學有限元模塊Fig.6 Acoustic finite element module
3) 接收機模塊
具體設置如圖7 所示。左側參數設置包含接收機增益、濾波器設置、傅里葉點數以及相關共享文件名;右側圖形展示部分分別為濾波器頻譜和接收陣輸出電壓信號。

圖7 接收機模塊Fig.7 Receiver module
4) 發射機模塊
具體設置如圖8 所示。左側參數設置包含發射機增益、卷積函數文件導入以及相關共享文件名;右側為圖形展示部分,第1 行分別為轉發信號時域和頻域圖,第2 行分別為存儲轉發模式和實時轉發模式主動聲吶接收信號。

圖8 發射機模塊Fig.8 Transmitter module
5) 信號處理模塊
具體設置如圖9 所示。左側參數設置包含待分析信號k(t)、參考信號s(t) 和待計算潛艇模型文件,并設置相關配置文件;右側第1 列圖分別為待分析信號、參考信號和分析信號時域波形,第2 列分別為時頻分析、包絡檢測和匹配濾波結果,第3 列分別為被模擬目標模型、目標強度和模擬回波。

圖9 信號處理模塊Fig.9 Signal processing module
2.3 精度與性能測試
2.3.1 精度測試
計算考慮誘餌電子艙散射對接收/轉發聲場影響的傳遞函數是該系統的關鍵。球殼和有限長柱殼均具有解析解,但對于有限長柱殼仿真時需要增加無限長的障板,無法計算軸向聲場,因此該部分采用具有理論解的球殼電子艙進行驗證。
應用彈性理論推導點源激勵下球殼散射聲場在柱坐標系下可表示為[21]

球殼電子艙參數為: 半徑0.2 m,厚度0.02 m,設置材料密度為,泊松比0.3,楊氏模量設置為復數210×(1+0.01i) GPa。分析頻段為7~15 kHz,發射陣和接收陣均為三元點源陣列,間距為3 cm。各發射陣元發送電壓響應均為120 dB,各陣元接收靈敏度均為-120 dB。兩陣中心分別位于電子艙上方0.78 m 和0.08 m 處。
將誘餌電子艙存在時水平方位的接收、發射傳遞函數和串漏傳遞函數與理論解對比,如圖10所示,可見總體吻合較好。

圖10 彈性球殼散射聲場傳遞函數隨頻率變化曲線Fig.10 Curves of transfer function of acoustic field scattered by elastic spherical shell versus frequency
2.3.2 性能測試
為測試仿真平臺的穩定性和可行性,對平臺進行多次仿真運行。測試主要在2.1 節所介紹的硬件系統下完成。測試采用動態測試方法,即所有模塊均被執行1 次。測試所用模型為球冠圓柱殼,具體參數見3.1 節,完成1 次測試所用時間定義為1 次仿真時間。
測試結果如表1 所示,仿真平臺運行良好,操作時運行流暢,時間可控。對比1、3、4 結果可知,頻率提高時網格數量增多,運行時間隨之增長;對比1、2 結果可知,相同網格時,運行時間和頻點數呈非線性正相關,這是由于1 次運算只需要1 次節點任務分配和組裝時間,計算規模越大計算效率越高。

表1 系統仿真測試結果Table 1 System simulation test results
3 仿真分析
3.1 電子艙散射聲場對傳遞函數影響分析
設置導入球冠圓柱殼形電子艙總長1.2 m、半徑0.2 m、殼厚0.02 m、殼體材料為鋼材料、密度、泊松比0.3、楊氏模量210 GPa。設置敵方距離2 km,水平深度相同,均勻聲速梯度,直達聲波入射角0°。計算頻段為7~15 kHz。發射陣和接收陣配置同2.3 節。
圖11 給出了考慮/忽略電子艙2 種情況下發射、接收傳遞函數隨頻率的變化規律。從圖中可以看出,在壓電響應或靈敏度隨頻率不變的假設條件下,忽略電子艙時,水平方位發射/接收傳遞函數不隨頻率變化;考慮電子艙時,由于電子艙殼體的散射作用,水平方位發射/接收傳遞函數隨著頻率快速起伏。相比于接收陣,發射陣距離電子艙更遠,因此發射傳遞函數起伏程度較接收傳遞函數弱。盡管發射/接收陣處于電子艙同一端,但2 個傳遞函數隨頻率起伏的趨勢不同步,這是由于近場散射聲場特性造成的。

圖11 球冠圓柱電子艙散射聲場傳遞函數隨頻率變化曲線Fig.11 Curves of transfer function of acoustic field scattered by spherical crown cylinder electronic cabin versus frequency
圖12 給出了考慮/忽略電子艙2 種情況下串漏傳遞函數幅度和相位隨頻率的變化規律。從圖中可以看出,忽略電子艙時,串漏函數隨著頻率提高而單調降低,當電子艙存在時,串漏函數隨頻率變化起伏程度明顯高于水平方位發射/接收指向性,這是由于發射/接收陣軸向空間濾波能力不足造成的,尤其是低頻情況。
綜上所述,電子艙對發射、接收以及串漏傳遞函數的影響是不容忽視的。仿真時可以通過在發射-接收陣之間加入障板、增大發射-接收陣和電子艙的距離以及更改電子艙的結構和材料等方法降低電子艙的影響,具體方法文中不予討論。
3.2 邊收邊發模式器材增益分析
根據式(4)計算的邊收邊發模式和存儲轉發模式下接收機輸入電壓與發射機輸出電壓之間傳遞函數比值為

其中,H(ω)相位設為0。上式結果幅值即有無反饋系統增益比如圖13 所示。
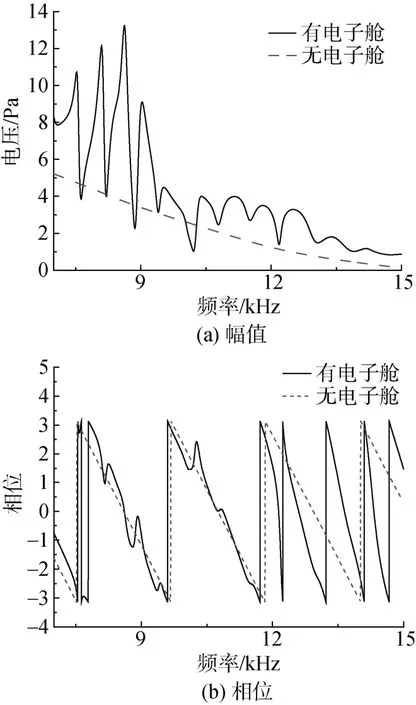
圖12 串漏傳遞函數隨頻率變化曲線Fig.12 Curves of cross-leak transfer function versus frequency

圖13 邊收邊發工作模式下系統增益比Fig.13 Gain ratio of system in receiving and sending mode
從圖中可以看出,頻率不同時,邊收邊發模式系統反饋方式不定。當H(ω)H3(ω)遠大于1時,系統增益減弱,呈負反饋;當H(ω)H3(ω)幅值接近1、相位接近 -π時,系統增益變得非常大,易引起系統自激;H(ω)H3(ω)越接近0,系統增益受串漏影響越小。無論是負反饋還是正反饋均會降低聲誘餌器材的穩定性,影響誘騙性能。因此在實際工程中,采取聲隔離措施時需要充分考慮串漏函數的影響并對其有效隔離。
4 結束語
文中利用COMSOL 軟件仿真定制的特點和強大的部署能力,設計了一套基于COMSOL 的主動式聲誘餌仿真系統,為考慮電子艙聲振耦合作用邊收邊發工作模式的聲誘餌器材性能提供了一個仿真平臺。該系統可快速仿真存儲轉發和邊收邊發2 種情況下的回波,同時兼具信號處理和仿真目標回波的功能,用戶可通過仿真結果評估設計器材的性能。該系統將各部分功能模塊化,獨立性高,界面簡潔,便于非研發人員操作,部署在集群上,計算速度快。經測試,該系統運行流暢,運行時間可控,為聲誘餌的性能研究提供了一個可靠的預評估系統。同時仿真并分析了電子艙對傳遞函數的影響,以及邊收邊發工作模式下器材的增益變化,實際工程中,需采用必要的隔離措施降低電子艙以及聲串漏的影響。
目前該系統中的仿真算法均較基礎,下一步將在各個模塊中增加用戶導入自定義Matlab 處理程序的功能,以實現用戶定制化仿真。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
