基于并聯機構構型的新型CTS試驗技術
2020-11-10 11:16:08董金剛魏忠武趙星宇秦永明馬漢東
空氣動力學學報 2020年5期
董金剛, 魏忠武, 趙星宇, 謝 峰, 秦永明, 馬漢東
(中國航天空氣動力技術研究院, 北京 100074)
0 引 言
捕獲軌跡試驗(CTS)是一種測量外掛物分離后相對載機軌跡的先進試驗方法,能有效評估外掛物分離的安全特性,獲得與全尺寸飛行數據基本相當的試驗結果,廣泛應用于外掛物投放/發射的地面模擬測量[1]。國外從20世紀50年代就已著手捕獲軌跡試驗的研究,先后在風洞中建立了CTS試驗系統[2-8],用于機彈相容性研究以及分離安全性評估,為機載武器的研制提供了技術支撐。國內中國空氣動力研究與發展中心自1980年就開始相繼研究用于1 m和2 m量級亞跨和超聲速風洞中的CTS系統[9-12],并得到了較大發展。CTS試驗系統通常由計算機及程序、六自由度運動機構、載彈測力天平、載機支撐系統、測控系統等組成,其中六自由度運動機構是其核心組件,現有的CTS試驗系統中六自由度機構普遍采用串聯的形式,存在機構剛度較弱以及關節誤差積累導致的定位精度差等不足。
近年來,隨著并聯機構的發展,研究人員逐漸認識到并聯機構的優勢,并聯形式的六自由度機構在風洞中已逐步得到應用,主要應用在風洞中提供模型支撐進行飛機模型動態試驗等方面[13-17]。在風洞中采用并聯機構構型的優勢有:1)定位精度高,相比串聯機構各關節存在的誤差累計效應來說,并聯機構多支鏈同時操作末端機構可以避免關節的積累誤差;2)機構剛度高,機構采用六個固定桿長的并聯機構構型,保證了高的機構剛度,受風載時變形小,模型不會出現劇烈抖動現象,保證風洞試驗過程中的定位精度;3)機構承載能力強,能夠承受高馬赫數時風洞開關車產生的大沖擊載荷。
為克服現有的基于串聯六自由度機構的CTS試驗技術的不足,本文將并聯機構應用到CTS風洞試驗技術中,對基于并聯機構構型的CTS風洞試驗技術進行研究,并進行風洞試驗驗證。
1 總體技術方案
如圖1所示,CTS試驗系統以專用的風洞試驗段為基礎,所有部件集成安裝到該試驗段。半臂迎角機構安裝到試驗段上方,用來支撐載機模型,迎角范圍為-5°~15°。載彈模型支撐機構采用固定桿長的并聯機構構型形式,具有6個運動自由度(3平動+3轉動)。為了實現六自由度機構大的滾轉運動空間,滿足武器分離投放模擬的要求,在并聯機構的前端連接模型的位置串聯了一個滾轉驅動機構,可以實現導彈±180°范圍的滾轉姿態模擬。六自由度機構在流場中阻塞度<1%。

圖1 六自由度運動機構Fig.1 Six-degree of freedom (DOF) mechanism
CTS試驗測控系統由信號采集系統、載彈軌跡生成程序、并聯式六自由度機構反解程序以及伺服電機控制程序組成,系統工作流程如圖2所示,試驗時根據載彈的氣動力以及其動力學參數通過載彈軌跡生成程序得到載彈某一個時刻的位姿,通過六自由度機構的反解程序得到伺服電機需要的運動位置。
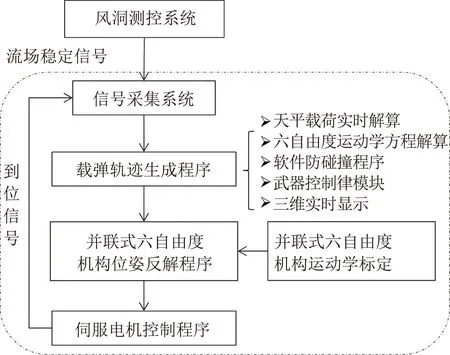
圖2 CTS系統工作流程圖Fig.2 Work flow diagram of CTS system
2 并聯六自由度機構
2.1 并聯六自由度機構結構參數及位姿反解
并聯六自由度機構基本構型如圖3所示,包括六組直線驅動單元(A1、A2、…、A6),動平臺、六組連接桿以及之間的運動副。在不影響機構分析的基礎上,可將連接桿AiCi(i=1,2,…,6)兩側的鉸鏈形式簡化為球關節,并在滑塊Ai所在平面中心設置基座原點O,并設定其x軸方向垂直于左右兩側平面,y軸方向平行于左右兩側平面。同時,在動平臺中心設置動系原點P,其坐標方向在初始狀態與O系保持平行。
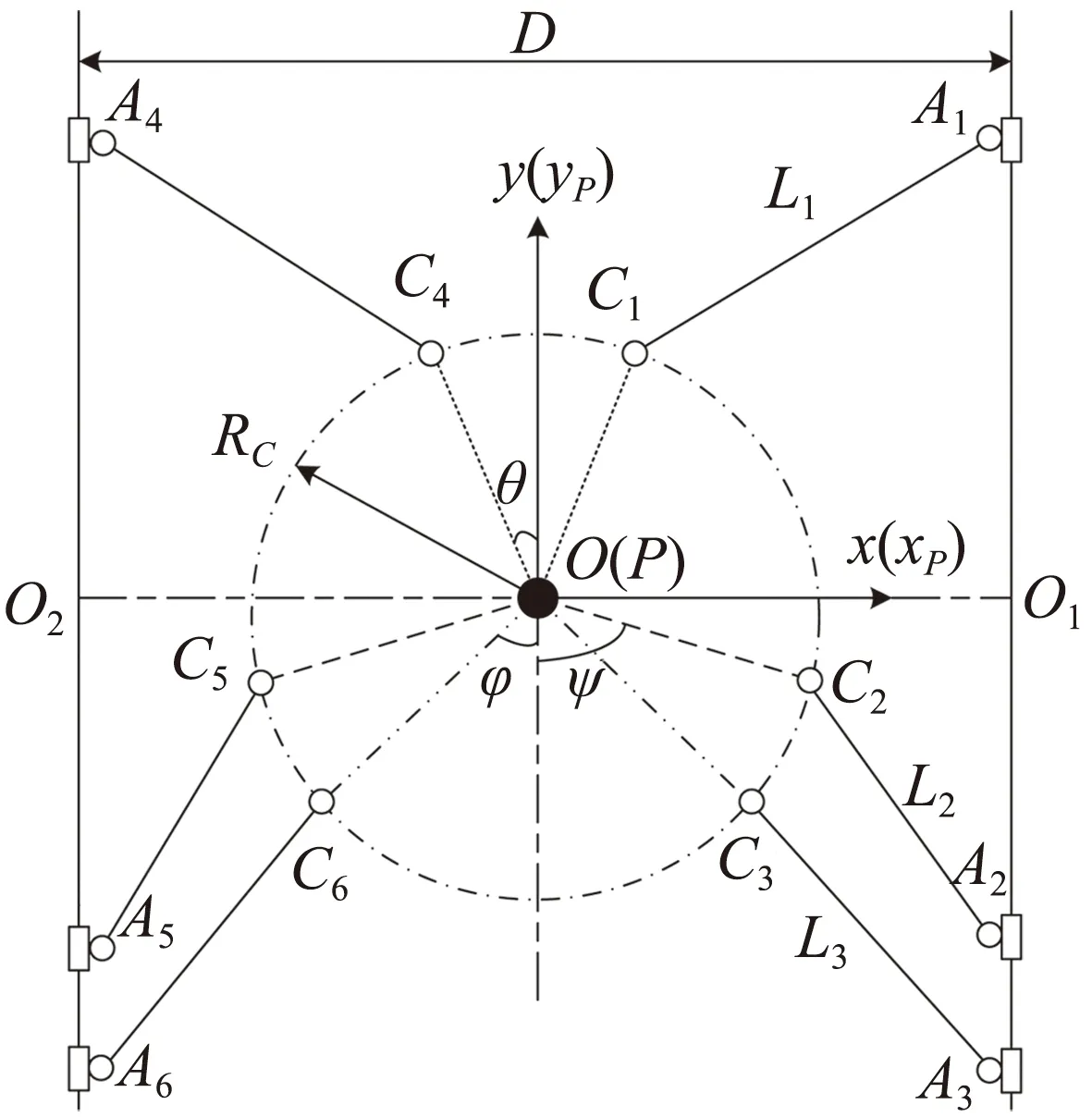
圖3 六自由度并聯機構示意圖Fig.3 Schematic diagram of 6-DOF parallel mechanism
將上層桿件(A1C1和A4C4)的桿長記作L1,將中層桿件(A2C2和A5C5)的桿長記作L2,將下層桿件(A3C3和A6C6)的桿長記作L3,兩側直線導軌中心線之間的距離為D,動平臺各鉸鏈點與yp軸夾角分別記作θ、φ和ψ,鉸鏈點的外接圓半徑記作RC。同時設定六組驅動的驅動量為q1、q2、…、q6。
給定六自由度并聯機構的基本參數,具體數值如表1所示。
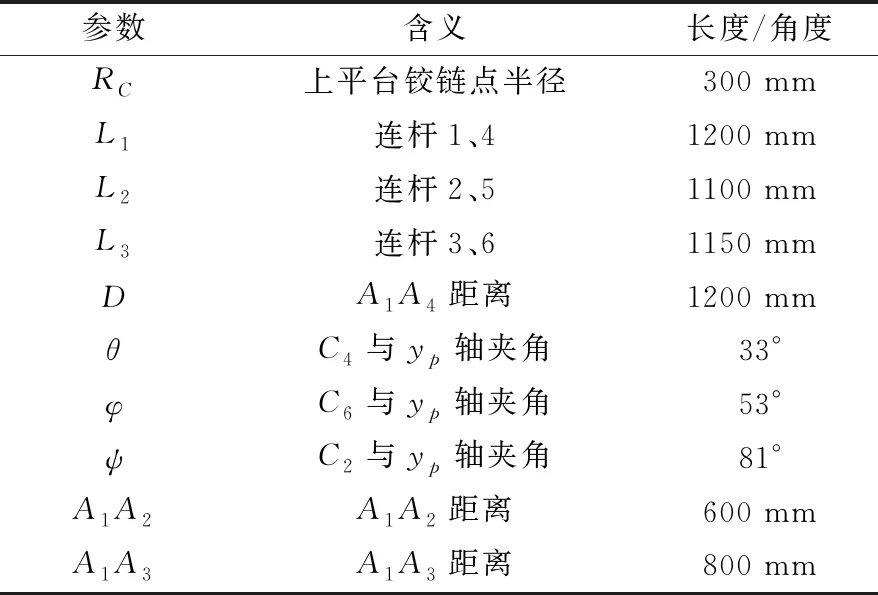
表1 六自由度并聯機構基本參數Table 1 Basic parameters of 6-DOF parallel mechanism
并聯機構的位姿反解是試驗系統中測控軟件的基礎,位姿反解過程為:給定載彈的分離位姿,需要解算出直線驅動單元對應的驅動量。
動坐標系{P}與動平臺固接,顯然,動坐標系中任意向量都能在定坐標系{O}中表示:
R=[T]R+P
(1)
其中,[T]是動平臺姿態方向余弦矩陣,應用zyx型歐拉角進行表示,P是選定點在定坐標系{O}中的位置矢量,可表示為P=(xpypzp)。
各個鉸鏈點Ci和Ai(i=1,2,…,6)在各自坐標系的坐標可以通過給定結構參數求得,通過公式(1)可以求出各個鉸鏈點在固定坐標系{O}中的坐標值。六個連接桿矢量CiAi在{O}系可以表達式為:
CiAi=Ci—Ai
(2)
同時,根據各個連接桿Li長度恒定的幾何關系,通過對公式(2)展開后進行求模計算,有|CiAi|=Li,即可得出各驅動量qi的函數表達式:

(3)
其中,q0表示驅動中間位置,為恒定值。
2.2 六自由度機構工作空間分析
六自由度機構的工作空間是CTS試驗載彈模型的活動范圍,該范圍會直接約束投放試驗的地面模擬能力。分析工作空間時考慮了各關節轉角的約束、各桿直線運行空間的約束、機構各構件的干涉及構件與風洞洞壁的干涉等情況。實際運行中并聯機構執行除滾轉外的5個自由度,滾轉運動由并聯機構前端的滾轉機構單獨實現,其角度范圍為:-180°≤θ ≤180°。
1) 靜平臺運行空間約束:Ax min i≤Axi≤Ax max i。Ax min i和Ax max i分別表示第i桿靜鉸鏈直線運行空間的最小值和最大值。
2) 鉸鏈轉角限制:δPi≤δP max、δBi≤δB max。δP max和δB max分別表示靜平臺鉸鏈和動平臺鉸鏈的最大轉角。
3) 機構各構件的干涉:dlmin≤Δ1、dmmin≤Δ2。dlmin和Δ1分別為運行中桿件和鉸鏈中心的最小距離和設計最小距離;dmmin和Δ2分別為運行中不同桿件之間的最小距離和設計最小距離。
4) 構件與洞壁的干涉:ymin≤Pyi≤ymax、zmin≤Pzi≤zmax。Pyi和Pzi分別為動平臺第i鉸鏈中心的坐標值。
根據機構干涉條件可計算構型的工作空間,垂直于氣流方向的工作截面如圖4所示。
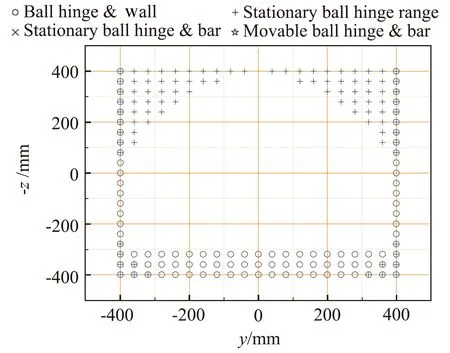
(a) υ、ψ∈[-20°,20°]
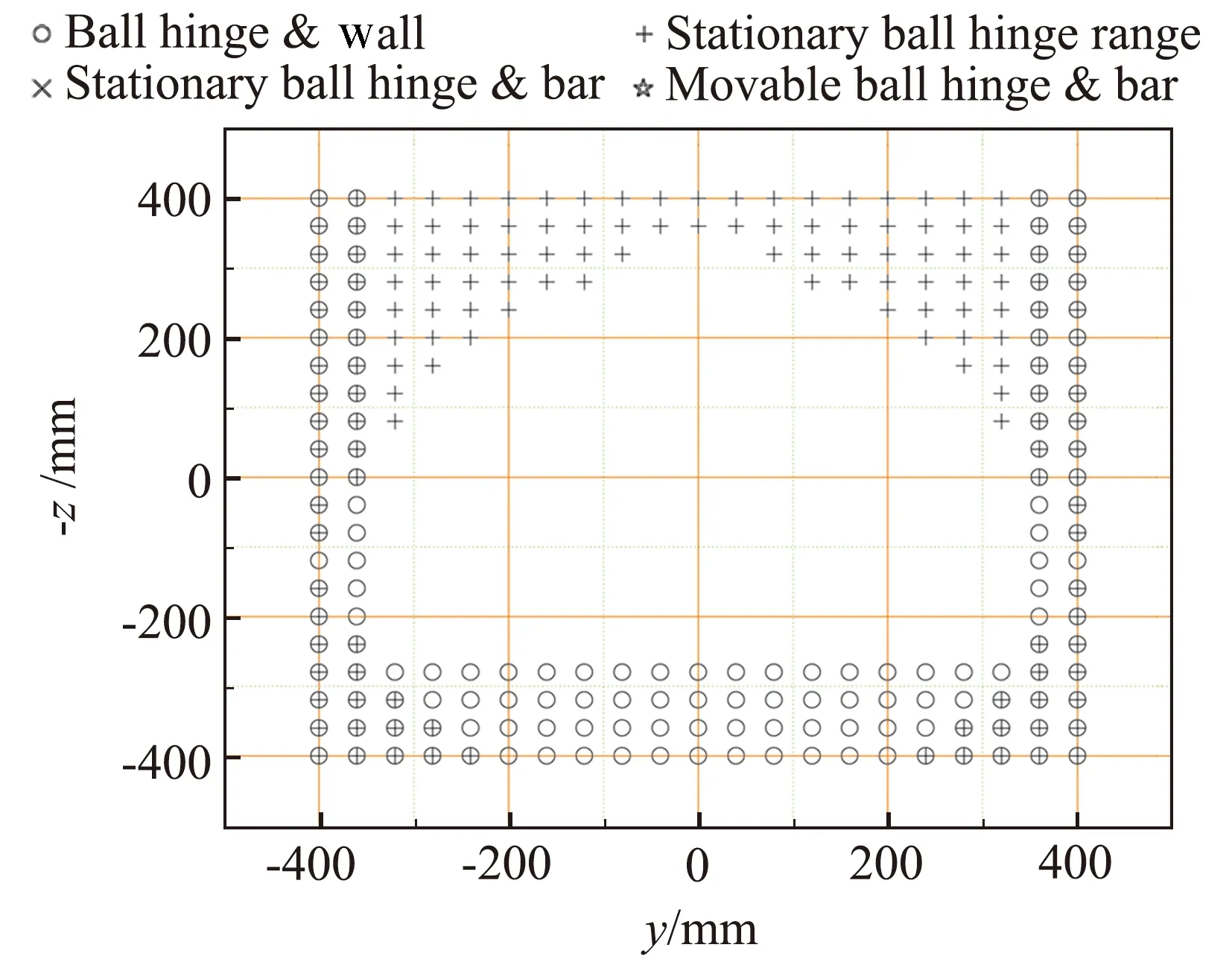
(b) υ、ψ∈[-30°,30°]
從工作空間截面圖可見,影響工作空間的因素主要是動平臺鉸鏈點與風洞洞壁的干涉及靜鉸鏈的角度范圍限制;機構的工作范圍與動平臺姿態角耦合,隨著動平臺姿態的增加,機構的工作范圍逐漸縮小。
在姿態角范圍在±30°內時,機構的工作空間可如表2所示,在該空間中可滿足常規分離試驗的風洞模擬。

表2 機構工作范圍Table 2 Workspace of the mechanism
2.3 六自由度機構剛度性能分析
串聯機構和并聯機構的剛度矩陣普遍采用如下形式:
K=[J]TK[J]
(4)
其中,K表示CTS機構的主剛度對角矩陣,為恒定值,可將其設定為單位矩陣。J為機構的雅克比矩陣。
根據方向剛度定義,剛度分為轉動剛度和移動剛度,其中移動剛度為主要剛度,取f為三個外力矢量方向上的單位矢量,則移動方向剛度可表示為:
KF=fTKTf
(5)

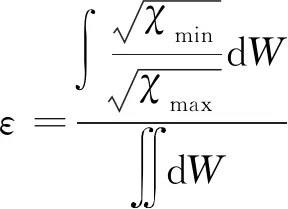
(6)
對并聯機構的ε求解得到值為0.83,串聯機構對比構型采用文獻[18]中的參數,計算結果0.63。可以看出并聯六自由度機構剛度較高。在相同機構阻塞度約束下,采用并聯構型可以提高六自由度機構的剛度以及承載力。
2.4 六自由度機構地面測試
利用便攜式三坐標對六自由度機構空間位姿進行測量,測試現場照片如圖(5)所示。便攜式的三坐標測量儀采用的是ROMER絕對測量臂。

圖5 載彈模型位姿測量照片Fig.5 Photograph of the attitude for the store model
采用文獻[19-22]中的運動學標定方法對研制的并聯式六自由度機構進行運動學標定并對加工及裝配帶來的誤差進行修正。把測量得到的位姿代入運動學位姿反解表達式(3)中,通過雅克比矩陣對非奇異性位姿進行辨識。利用辨識出的并聯機構的結構參數修正測控系統中的參數以提高并聯機構運動精度。
隨機選取空間任意10組位姿進行定位精準度的測試,表3給出了機構精準度的測試結果。并聯機構的定位精度以及對確定位姿點的定位準度比較高,位置精度優于0.1 mm,角度精度優于0.05°。
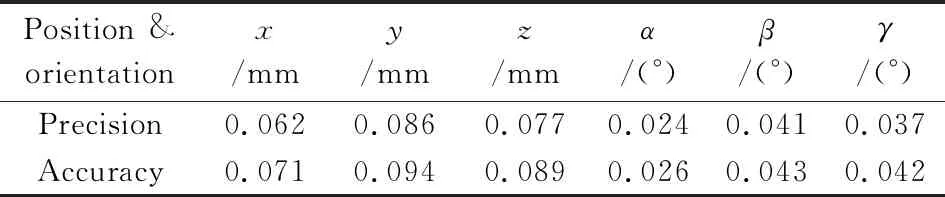
表3 機構各自由度的精準度Table 3 Precision and accuracy of 6-DOF mechanism
3 風洞試驗結果與分析
3.1 自由流對比試驗
為了驗證在風洞氣流條件下六自由度機構的定位精準度以及機構運行的穩定性,進行了自由流條件下六自由度機構走迎角序列時導彈氣動系數的測量。圖6是自由流對比試驗結果,從結果中可以看出:CTS六自由度機構得到的結果重復性很好,說明機構在有風載下具有良好的定位精度;自由流試驗數據與風洞中常規迎角機構得到試驗結果一致性較好。圖7是六自由度機構自由流時不同馬赫數下的試驗結果,從圖中可以看出不同馬赫數下得到的試驗結果規律性良好。
3.2 帶載機干擾的軌跡線試驗
為了驗證基于并聯機構的CTS試驗系統的可靠性,進行了帶載機干擾的軌跡線驗證試驗,圖8和圖9是在相同工況下得到的軌跡線數據對比,從結果可以看出:FD-12風洞CTS系統軌跡線的重復性較好,與原有串聯機構軌跡線的數據規律一致,數據相關性較好;只有在時間序列的后半段,俯仰角姿態出現分叉現象,主要是因為CTS試驗方法中軌跡解算存在誤差積累效應,串聯機構會存在由于剛度不足導致的位姿定位精度誤差,給試驗結果帶來累計效應,所以隨時間的增加誤差會增大。
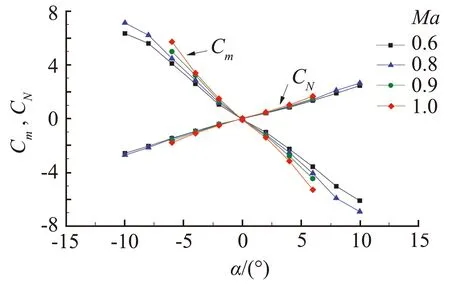
圖7 自由流下不同馬赫數下試驗結果Fig.7 Feestream comparisons for different Mach numbers
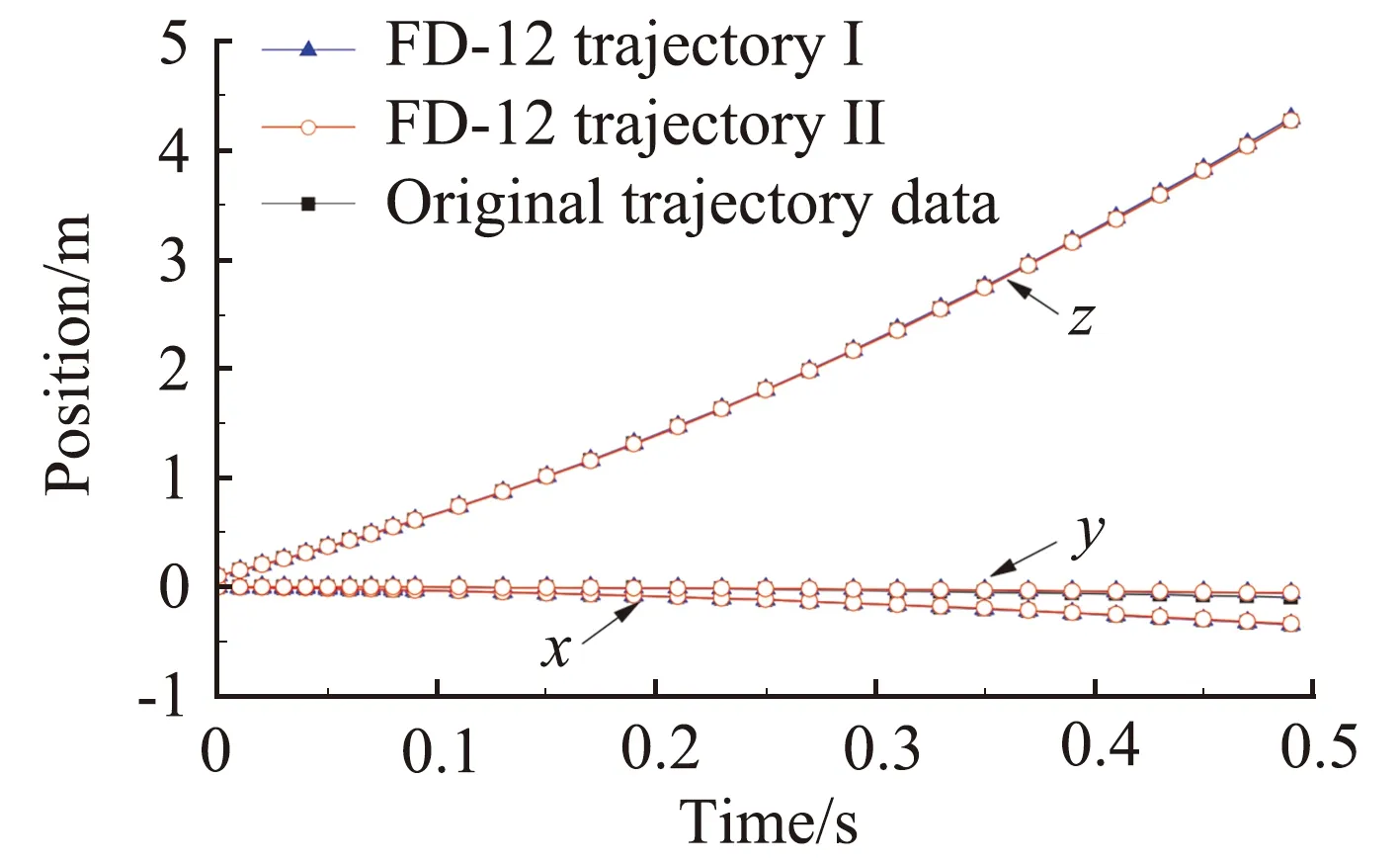
圖8 帶載機干擾的軌跡線位置重復性對比Fig.8 Comparisons of trajectory position repetitions with the carrier interference
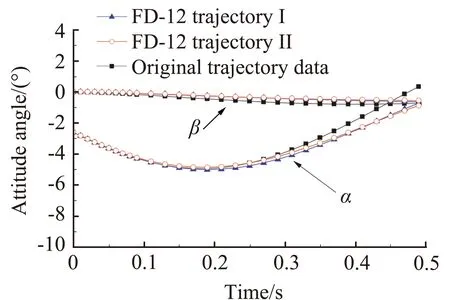
圖9 帶載機干擾的軌跡線姿態角重復性對比Fig.9 Comparisons of trajectory pose repetitions with the carrier interference
4 結 論
本文將并聯六自由度機構應用到1.2 m高速風洞CTS試驗技術,在風洞尺寸約束下對六自由度機構構型以及結構參數進行了設計,并計算了機構的運動空間,進行了地面測試以及風洞試驗驗證,得到如下結論:
1) 高速風洞CTS試驗系統中,采用固定桿長的并聯六自由度機構可以提高試驗系統的機構剛度、定位精準度以及機構的承載能力。機構位置精度優于0.1 mm,角度精度優于0.05°,滿足CTS試驗要求。
2) 自由流風洞試驗數據重復性良好,與風洞常規迎角機構得到的數據一致性較好且不同馬赫數下試驗結果規律性良好;帶載機干擾的CTS軌跡線試驗數據重復性良好。
