刮板輸送機自動張緊系統的設計與仿真
2020-11-09 14:31:31趙偉
中國化工貿易·下旬刊 2020年5期
摘 要:刮板輸送機是選煤廠生產的必要生產設備。刮板輸送機的運行狀態關乎生產的穩定性。該設備在啟動階段鏈條張力發生變化,易發生鏈條故障,為解決這一問題,設計自動張緊裝置。本文從刮板輸送機結構、張緊系統結構、自動張緊系統設計等方面進行探討。
關鍵詞:刮板輸送機;張緊;鏈條;液壓缸;沖擊
采煤機、刮板輸送機、液壓支架等作為綜采工作面的大型機電設備,其運行的可靠性和穩定性直接決定煤炭的開采效率和質量。刮板輸送機不僅承擔著煤炭、物料的運輸任務,其還為采煤機的牽引提供導軌。隨著刮板輸送機朝著大運量、大功率的方向發展,其可靠性和安全性受到了嚴峻的考驗。實踐表明,刮板鏈作為刮板輸送機最易損壞的部件,主要歸咎于其啟動方式或者載重量發生變化,需對刮板輸送機自動張緊系統進行設計,并對張緊系統性能進行仿真驗證。
1 刮板輸送機結構
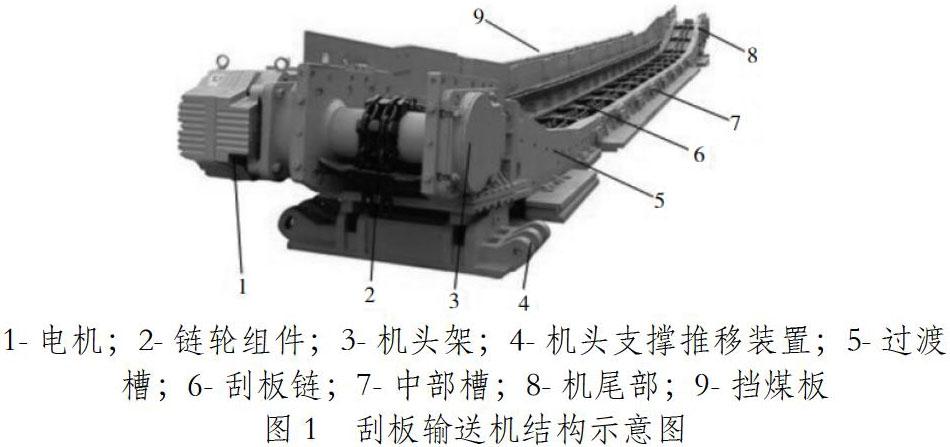
刮板輸送機是以撓性體為牽引機構的輸送機械,是當前工作面配合采煤機工作的關鍵設備。刮板輸送機的結構如圖1所示。刮板輸送機主要由機頭部、鏈輪組件、過渡槽、中部槽、機尾部以及刮板鏈等組成。
2 刮板輸送機自動張緊系統結構
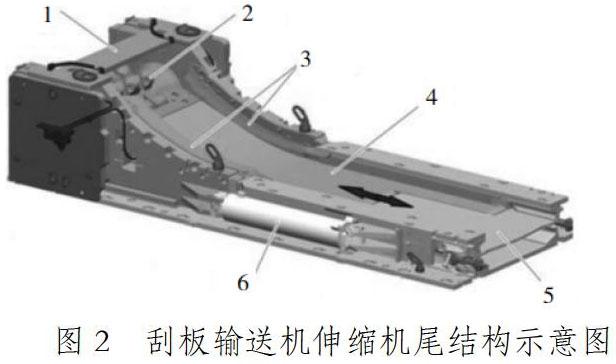
刮板輸送機自動張緊系統主要根據實時工況對刮板鏈張力進行實時調整,主要包括有伸縮機尾、張緊系統電氣控制分系統和液壓控制分系統組成。張緊系統液壓控制分系統為整個系統的關鍵,主要由各類液壓元器件組成,根據電氣控制系統所發出的信號實現對液壓油流動方向的控制,從而實現對伸縮機尾的伸出和收縮的控制。伸縮機尾為張緊系統的機械執行機構,其結構如圖2所示。
3 自動張緊系統液壓控制系統的設計
3.1 液壓控制系統的工作原理
液壓控制分系統作為張緊系統的核心部分,液壓控制系統的響應特性和控制精度直接決定張緊系統性能的發揮。自動張緊系統的液壓控制分系統主要由液壓缸、伸出閥、收縮閥、壓力傳感器以及各類液壓閥和管路等組成。
自動張緊系統液壓分系統的工作原理為根據壓力傳感器所采集的數據判斷伸出閥或者收縮閥的動作。其中,液壓泵站為整個系統的動力源;伸出閥和收縮閥為整個系統的執行機構,通過其液壓缸的收縮和伸出來控制伸縮機尾的收縮和伸出。此外,為保證系統的穩定運行,當乳化液壓力超過限值時,減壓閥動作以達到減壓的目的。
3.2 液壓控制系統的性能指標要求
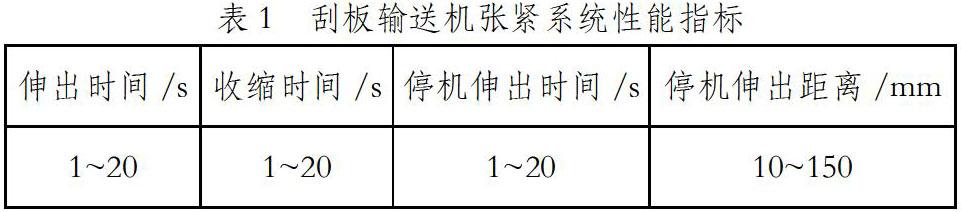
為確保自動張緊系統能夠根據生產需求實現對鏈條張緊力的調節,要求張緊系統在液壓系統效率、功率利用、調速范圍以及液壓系統剛度方面滿足要求,最終反應到張緊系統的穩定性、快速響應特性以及控制精度等。自動張緊系統的性能指標如表1所示。
3.3 液壓系統參數確定
液壓缸、各類控制閥為自動張緊裝置液壓控制系統的關鍵液壓元器件,所謂自動張緊裝置的設計主要是確定各類液壓元器件的相關參數。關鍵元器件參數如表2所示。
4 自動張緊裝置液壓系統的仿真研究
4.1 仿真模型的搭建
基于AMESim軟件分別對液壓系統中的液壓泵站、伸出閥、收縮閥、液壓缸等液壓元器件的模型進行搭建,并將各個零部件的模型裝配為自動張緊系統液壓控制分系統的仿真模型。根據表2計算所得的各液壓元器件的參數對仿真模型中的參數進行設置,分別對自動張緊裝置液壓控制系統液壓缸伸出工況和收縮工況的性能進行仿真分析。
4.2 仿真結果分析
設定仿真時長為10s,仿真步長為0.1s。
4.2.1 伸出工況下仿真結果的分析
液壓缸只有在無桿側壓力低于設定壓力203值后才會進行伸出動作。因此,設定液壓缸無桿側壓力值為0時對活塞位移、活塞速度以及活塞推力三個參數進行仿真分析。仿真結果分析如下:當液壓缸無桿側壓力為0時,液壓缸迅速伸出,即在仿真開始階段活塞桿的速度在瞬間達到最大值,最大活塞速度為0.056m/s;隨著液壓缸無桿側壓力的增加,活塞桿的伸出速度呈線性減小趨勢,直到液壓缸無桿側壓力值等于系統設定壓力值時,活塞桿的速度為0,歷時4.2s,此時活塞桿的伸出位移為0.1m,最終液壓缸無桿側的壓力穩定在15.3MPa。上述仿真結果滿足系統要求。
4.2.2 收縮工況下仿真結果的分析
當液壓缸無桿側的壓力大于系統設定壓力值時,液壓缸才會進行收縮動作。此處,設定液壓缸無桿側的壓力值為20MPa,同樣對活塞位移、活塞速度以及活塞推力三個參數進行仿真分析。仿真結果分析如下:當液壓缸無桿側的壓力值為20MPa時,在仿真初期液壓缸有桿側的壓力小于單向閥反向導通壓力,導致無桿側的壓力持續上升。當單向閥反向被導通時,液壓缸活塞開始收縮,并歷時3s后活塞桿的位移達到最低為0.205m。此時,無桿側的壓力小于系統設定壓力值,系統開始伸出動作,直到無桿側壓力值穩定于15.3MPa時,伸出動作停止。
經仿真可知,在收縮工況下由于系統壓力波動導致對系統造成沖擊,從而使得刮板輸送機鏈條的張力發生較大的浮動。因此,為減小上述系統沖擊的情況,在收縮工況下應適當降低活塞桿的運行速度、延長無桿側的釋壓時間。
5 結語
刮板輸送機承擔著綜采工作面煤炭、物料運輸任務的同時還作為采煤機牽引的導軌,因此其可靠性和穩定性尤為重要。鑒于刮板輸送機在實際工作中由于啟動以及載荷突變的原因,需對鏈條張力進行實時調整。為此,為刮板輸送機設計與其相配套、性能穩定的自動張緊裝置,可促進綜采工作面開采效率的提升。
參考文獻:
[1]郭衛,郭榮.刮板輸送機自動張緊系統性能分析[J].煤礦機械,2014(3):32-34.
[2]劉子榮.刮板運輸機常見故障與預防對策研究[J].山東煤炭科技,2018(5):128-129+134.
[3]段天平.煤礦井下刮板運輸機電損壞原因及對策分析[J].機械管理開發,2017,32(1):182-183.
作者簡介:
趙偉(1988- ),男,山西盂縣人,本科,畢業于中北大學,機械工程師,從事機械設備優化設計研究。