無人機姿態(tài)誤差對目標定位的誤差分析?
2020-11-02 09:00:34石章松吳中紅
計算機與數字工程 2020年9期
關鍵詞:測量
吳 昊 石章松 吳中紅
(海軍工程大學 武漢 430033)
1 引言
近年來,海軍為奪取制空制海權,在平臺和裝備建設上取得很多成績,其戰(zhàn)略思想著重強調了海上火力支援的能力,發(fā)展了“垂直包圍”、“艦對目標的機動”、“超視距登陸”、“空海一體登陸”等一系列戰(zhàn)法[1]。在艦艇大口徑火炮對岸進行精確打擊時,受制于傳統(tǒng)傳感器的限制,不能對目標進行實施跟蹤定位,因此采用無人偵察機對遠程目標進行前沿偵查,為艦載武器提供精確的目標位置信息,引導制導彈藥實施精確的對岸打擊[2]。無人機對制導彈藥進行保障射擊主要有如下優(yōu)勢:一是能在終端屏幕上不間斷的為指揮員提供目標信息;二是利用無人機傳感器偵察確定目標坐標的精度高;三是能夠保障艦炮實現(xiàn)對地面觀察不能觀察目標及敵縱深目標的打擊任務等;四是結合精確制導彈藥,彌補了各類武器由于偵察手段不足所導致的打擊毀耗彈量大、傷概率低等問題[3~4]。
但在無人機對制導彈藥進行保障的條件下,由于無人機姿態(tài)角度誤差(航向角φ、俯仰角θ、滾轉角γ)的存在,測量得到的目標位置與實際位置存在一定偏差,導致遠程大口徑艦炮對目標不能進行精確打擊,為解決上述問題,本文主要對無人機姿態(tài)誤差對目標定位誤差的影響進行了定量研究,并得出了相關結論,為艦艇制導彈藥的遠程打擊提供了目標依據和指標參考,給無人機及慣導器件的安裝、生產也起到了一定的借鑒意義。
2 無人機姿態(tài)對測量目標點位置誤差影響的數學模型
2.1 相關坐標系的定義
1)T系-地理坐標系
地理坐標系OtXtYtZt是指無人機載體在飛行時,為表示當前位置的東向、北向和垂直方向的姿態(tài)而固結在載體之上的坐標系。本文所采用的是東北天地理坐標系,該坐標系的原點Ot選在了載體的重心處,其中,OtXt指向東,OtYt指向北、OtZt沿垂直方向指向天。
2)N系-導航坐標系
導航坐標系OnXnYnZn是無人機載體因導航計算機系統(tǒng)工作所需要而選擇的作為當行基準的一種坐標系。導航坐標系其實只是一種功能性概念意義上的定義,本文導航坐標系用的與地理坐標系相重合的東北天坐標系。其中,原點On選在無人機載體的重心,OnXn指向東、OnYn指向北、OnZn根據右手法則指向與地表垂直向上的方向。
3)b系-載體坐標系
各傳感器因為是固定安裝在無人機載體上的,故存在一個坐標系來表示所測量的信息。載體坐標系ObXbYbZb是與載體固定連接的直角坐標系。其中。原點坐標Ob位于無人機載體重心、ObXb沿載體橫軸向右、ObYb沿載體的縱軸向前、ObZb則沿載體的豎軸向上。如圖1 所示,依據地理坐標系與載體坐標系所構成的角度關系可知導航計算時用到的無人機載體的姿態(tài)及航向[5]。
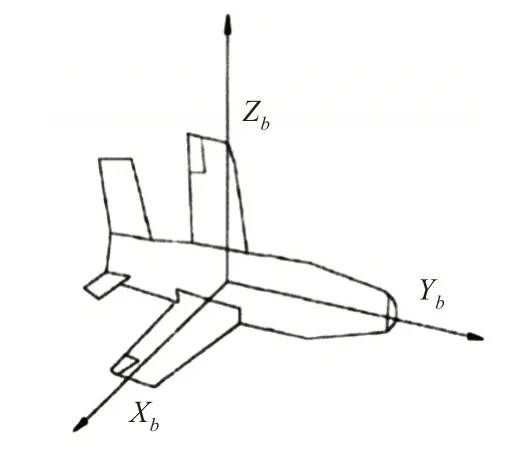
圖1 b系-載體坐標系
2.2 姿態(tài)角的表示方法
無人機姿態(tài)角是通過其導航坐標系各坐標軸與載體坐標系各個軸之間的夾角關系來定義的。其中,從一個坐標系變換到另一個坐標系有兩種方式,轉動和平移。平移不改變坐標系的方向,故對于姿態(tài)測量來講我們只需要研究無人機在空間上的姿態(tài)角和飛行航向角(統(tǒng)稱姿態(tài)角),可用載體坐標系相對地理坐標系的轉動關系來表示出來。其中假定載體坐標系與導航坐標系原點處于同一位置(方向不同),那么可以通過3 次不同方向的坐標軸轉動使載體坐標系與導航坐標系相重合,每次轉動的角度大小稱之為歐拉角,即姿態(tài)角,如圖2 所示。本文中用φ、θ、γ表示無人機的三個姿態(tài)角[6]。

圖2 姿態(tài)角度的表示方法
航向角φ:定義為繞Z 軸轉動的角度,是指在空間載體縱軸方向在水平面上的投影與地球子午線之間的夾角,即為載體坐標系Yb軸在地理坐標系中水平面的投影與地理坐標系Yt的夾角。并以地理北向為起點,以順時針轉動方向為正,定義角度范圍是(0 ~360°)。定義無人機載體的Yb軸在地理坐標系水平面上的投影和地磁子午線的夾角為磁航向角。用φm來表示。
俯仰角θ:定義為繞X 軸轉動的角度,即在空間上是指無人機載體的Yb軸與地理坐標系中水平面之間的夾角,同時也是載體縱軸Yb與其在地理水平面上的投影之間的夾角。以載體抬頭向上為正,向下為負,定義范圍是(-90°~90°)。
滾轉角γ:定義為繞Y 軸轉動的角度,是指無人機載體的橫軸Xb與地理坐標系水平面之間的夾角,即為載體橫軸Xb與其在地理水平面上投影的夾角。該角以載體右邊抬起為正,左邊抬起為負,定義范圍是(-180°~180°)。
轉動是有方向的,故按上述定義中用歐拉角轉動法表示姿態(tài)時,順序不同的轉動φ、θ、γ三個角所得到的姿態(tài)方位是不同的。每一次轉動過程可以用一個矩陣來表示,稱為姿態(tài)矩陣[5]。按照上面的方法定義的歐拉角可以確定一個姿態(tài)矩陣。
繞X軸轉動θ角時,得到:

繞Y軸轉動γ角時,得到:

由該式可以看出,如果一個向量在地理坐標系中表示為Rn,則在地理坐標系中表示Rb可為
3 目標點位置誤差的表示方法
3.1 姿態(tài)角度的誤差研究
無人機航向姿態(tài)測量系統(tǒng)采用了多種傳感器件,計算和算法過程較多,故不可避免地存在各種誤差,其中按照引起誤差的原因分類,可以大體分兩類:特有誤差和固有誤差[7]。固有誤差指的是傳感器或測試系統(tǒng)在設計、裝配及生產過程中就所固有的誤差,它的產生是不因工作環(huán)境、工作地點的改變而改變。特有誤差則是指與當前工作狀態(tài)、工作環(huán)境相關,由于特定的運動形式或狀態(tài)所導致測量結果的誤差。
固定誤差是在實際應用中,因航向姿態(tài)測量系統(tǒng)在開始工作之前,傳入導航計算機的數據參數存在一定誤差,并由于慣性測量系統(tǒng)各組成部分存在缺陷,加之計算方法不同,因而航姿系統(tǒng)的工作精度受到影響,主要包括有慣性敏感器件的誤差、計算機的算法誤差、初始對準誤差等,這其中慣性敏感器件的誤差因出廠時便固有,且不同個體誤差不同,難以控制,通常該誤差占系統(tǒng)固有誤差的80%左右[8]。
特有誤差是在姿態(tài)測量系統(tǒng)實際測算過程中,與載體運動有關系統(tǒng)所特有的誤差,大部分誤差產生原因涉及捷聯(lián)慣性系統(tǒng),與加速度計、陀螺儀在運動狀態(tài)下的工作性能相關的誤差源。由于特有誤差占整體誤差比重較小,故本文暫不考慮。
由于慣性敏感器件的誤差占系統(tǒng)固有誤差的80%左右[9],因此本文主要考慮該誤差,根據無人機廠家提供的指標估算慣導器件測量精度選擇在航向角0~0.2°,俯仰角0~0.1°,滾轉角為0~0.1°[10]。
3.2 目標點位置誤差的表示方法
為了方便統(tǒng)一,選取載體坐標系來研究目標位置誤差,在地理坐標系下實際點設為M0(),該點可由其他傳感器測量獲得,為已知,假定不存在測量誤差,由于地理坐標系原點選在載體重心O,故目標相對無人機位置=()。
在載體坐標系下設目標實際點坐標為,則有:

當存在姿態(tài)誤差時,地理坐標系下,目標相對載體位置并未發(fā)生變化,仍為=(),但從地理坐標系(即導航坐標系)到載體坐標系的變換矩陣應當考慮角度誤差,即:

那么在地理坐標系下,目標定位誤差可以用目標實際點與測量點之間的距離來表示,即:

4 仿真分析
假設現(xiàn)有某中小型無人偵察機位于高空對某地面目標實施偵察,假定某時刻該目標及無人機實時位置可由其他傳感器準確測量獲得(不考慮其他傳感器的目標定位誤差),經測算,在載體坐標系下,該目標位置相對無人機的坐標為(10,10,-10),單位為km。下面,主要從三個角度及相應誤差對目標定位的影響分別進行仿真實驗。
4.1 航向角φ 及其誤差?φ 對目標定位精度的影響
分別設俯仰角、滾轉角為0°,且暫不考慮兩個角度誤差的影響,在此情況下對實驗進行仿真計算。仿真參數設置如下:航向角Φ變化范圍為0~360°,誤差?φ取0~0.2°,以?φ為X軸、目標定位誤差為Y軸(單位:km),得出在隨φ、?φ變化,定位誤差的變化范圍(如圖3),同時任取一固定?φ值,研究隨φ角度變化,對目標定位精度的影響(如圖4)。
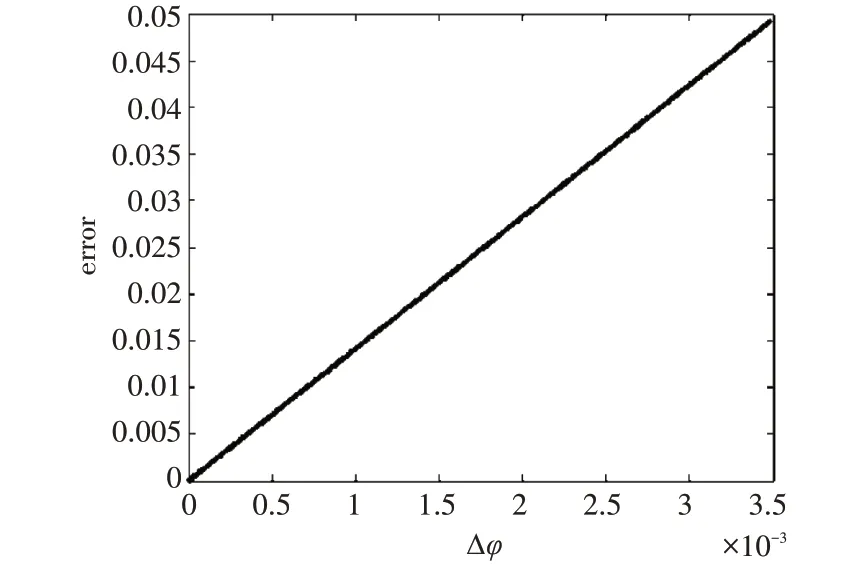
圖3 航向角φ 及其誤差?φ 對目標定位精度的影響圖
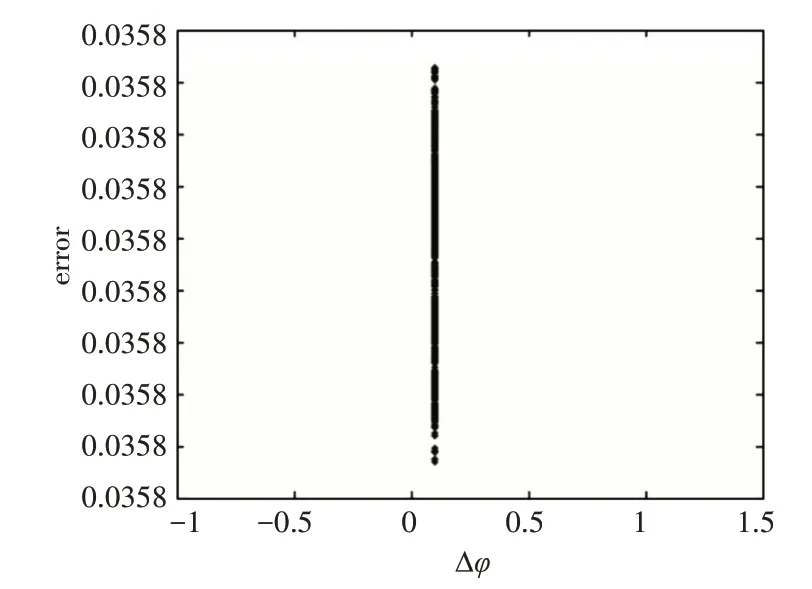
圖4 某?φ 角度下φ 對目標定位精度的影響
4.2 俯仰角θ 及其誤差?θ 對目標定位精度的影響
分別設航向角、滾轉角為0°,且暫不考慮兩個角度誤差的影響,在此情況下對實驗進行仿真計算。仿真參數設置如下:俯仰角θ變化范圍為-90°~90°,誤差?θ取0~0.1°,以?θ為X軸、目標定位誤差為Y 軸(單位:km),得出在隨θ、?θ變化,定位誤差的變化范圍(如圖5),同時任取一固定?θ值,研究隨θ角度變化,對目標定位精度的影響(如圖6)。
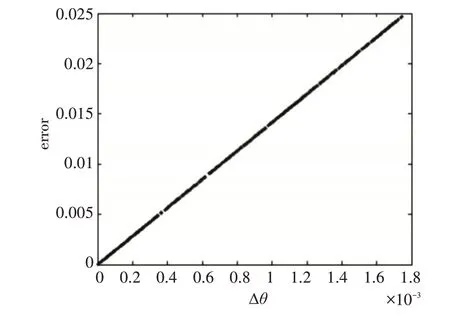
圖5 俯仰角θ 及其誤差?θ 對目標定位精度的影響
4.3 滾轉角γ 及其誤差?γ 對目標定位精度的影響
分別設航向角、俯仰角為0°,且暫不考慮兩個角度誤差的影響,在此情況下對實驗進行仿真計算。仿真參數設置如下:滾轉角γ變化范圍為-180°~180°,誤差?γ取0~0.1°,以?γ為X 軸、目標定位誤差為Y軸(單位:km),得出在隨γ、?γ變化,定位誤差的變化范圍(如圖7),同時任取一固定?γ值,研究隨γ角度變化,對目標定位精度的影響(如圖8)。

圖6 某?θ 角度下θ 對目標定位精度的影響

圖7 滾轉角γ 及其誤差△γ 對目標定位精度的影響

圖8 某?γ 角度下γ 對目標定位精度的影響
從圖3~圖8中可以看出,在設另外兩個姿態(tài)角及其誤差為0 的情況下,研究某一姿態(tài)角及其誤差對目標定位精度的影響時,有以下兩個結論:一是在角度誤差固定的情況下,某一姿態(tài)角的變化對無人機定位誤差無影響;二是當角度誤差很小的情況下,無人機定位誤差與姿態(tài)角度誤差成線性關系,姿態(tài)角度誤差越大,無人機定位誤差也就越大。
在沿無人機載體航向方向的情況下觀測,以目標真實點(10,10,-10)為圓心,若目標位于地面,則無人機的測量散布誤差應當為一個橢圓,且X 軸對應航向角誤差?φ對目標定位精度值(單位:m),Y軸為俯仰角誤差?θ對目標定位的精度值(單位:m),為如圖9所示;若目標點位于空中,則無人機的測量散布誤差應當為一個橢球,其中X、Y軸同地面目標一致,Z 軸為滾轉角度誤差?γ對目標定位精度值(單位:m),如圖10所示。
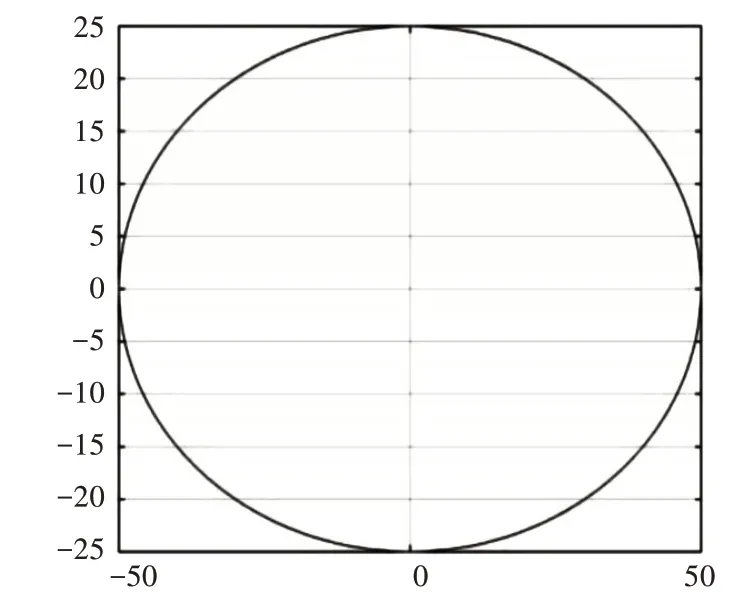
圖9 目標點為地面目標時的測量散布誤差

圖10 目標點為空中目標時的測量散布誤差
當前,設某型大口徑艦炮圓概率誤差CEP(《GJB6289-2008 地地彈道式導彈命中精度評定方法》將CEP 定義為以目標點為圓心,彈著概率為50%的圓域半徑[11])為22.17m[12],從上述測量散布誤差來看,顯然還達不到該型大口徑艦炮遠程精確打擊的要求。
5 結語
為了實現(xiàn)遠程大口徑艦炮對岸精確打擊,充分利用火力資源,研究無人機載體姿態(tài)角度誤差引起的目標定位精度的情況,本文利用地理坐標系和載體坐標系之間的轉換關系,提出并建立了無人機姿態(tài)誤差與目標定位精度相互關系的數學模型,仿真實驗表明,三個姿態(tài)角度對目標定位精度無影響,同時在角度誤差較小的情況下,定位精度與誤差角度大小成正比關系,該中小型無人機定位精度大致在0~50m范圍內,據此,艦艇指揮員可根據目標點誤差的分布情況及大口徑火炮的射彈散布情況,決定毀傷目標所需的彈藥數量,確保有效攻擊。但就上述情況來看,無人機載體姿態(tài)誤差對目標定位精度的影響依然較大,毀傷目標所需彈藥數量較多,故如何消減誤差,進一步提升無人機定位精度,仍是下一步研究的重點方向。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00