引導數據對機載衛通天線捕星的影響分析
2020-10-27 09:46:56趙麗張明軍侯景華
移動通信 2020年8期
關鍵詞:仿真
趙麗 張明軍 侯景華

【摘 ?要】
針對影響機載衛通天線指向精度和引導成功概率的因素,建立了數據引導數學模型和指令誤差計算模型,并進行了仿真,推導了指令誤差最大允許誤差范圍,研究了天線引導成功概率計算模型,分析了數據引導誤差對指向精度和引導成功概率的影響,提出了提高天線引導成功率概率的方法。
【關鍵詞】指向誤差;指令誤差;仿真;成功率
[Abstract]
In view of factors influencing pointing accuracy and guidance success probability of airborne Satcom antenna, data guided mathematical model and command error calculation model are established and simulated. Then this paper derives the maximum allowable error range of command error, studies the calculation model of antenna guidance success probability, and analyzes the effect of data guidance error on the pointing accuracy and guidance success probability. Finally, a method is proposed to improve the success probability of antenna guidance.
[Key words]pointing error; command error; simulation; success probability
0 ? 引言
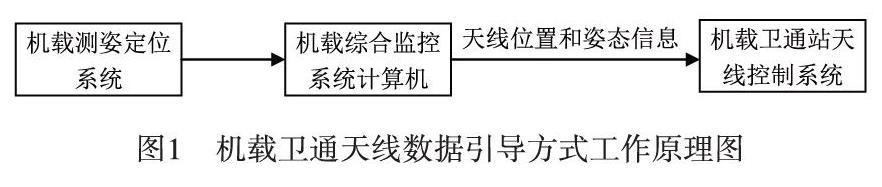
數據引導方式是機載衛通站伺服系統的重要工作方式,在此引導方式下,機載測姿定位系統通過機載綜合監控系統計算機實時向機載衛通站的天線控制系統提供衛通天線工作所需的天線姿態信息(航向角、俯仰角、橫滾角)和位置信息(地理經度L、地理緯度B、大地高度H),引導衛通天線由當前位置到達通信衛星所在位置,完成對通信衛星的初始捕獲,捕獲衛星后天線能連續跟蹤衛星。數據引導方式工作原理圖如圖1所示。
衛通天線的捕星能力主要體現在指向精度和捕星成功概率上。指向精度關系到天線能否成功捕獲衛星和位置記憶的關鍵參數,直接反映了衛通天線的捕星性能。在數據引導工作模式下,捕星成功的關鍵在于提高引導成功概率。影響天線指向精度的因素主要包括衛星定位誤差、天線座的軸系誤差、編碼誤差、伺服誤差和指令誤差等。其中,衛星定位誤差、軸系誤差、編碼誤差和伺服誤差為系統誤差,可以在天線出廠時通過標校方法得到,指令誤差為隨機指向誤差,是由數據引導誤差產生的天線對星誤差,因而,數據引導誤差是影響指向精度的主要因素。本文通過建立數學模型和仿真,分析了數據引導誤差對指向精度和引導成功概率的影響,提出了提高天線引導成功概率的方法,為分析解決指向誤差、提高天線跟星精度提供了技術支持。
1 ? 數據引導數學模型
衛星捕獲和記憶是以數據引導方式為基礎的。無論飛機的位置、姿態如何變化,只要知道了飛機的位置數據和姿態數據,通過數學計算,算出衛通天線對星參數(A、E)就可以使天線的波束指向衛星位置,并保持相對不動。
1.1 ?天線對星參數計算流程
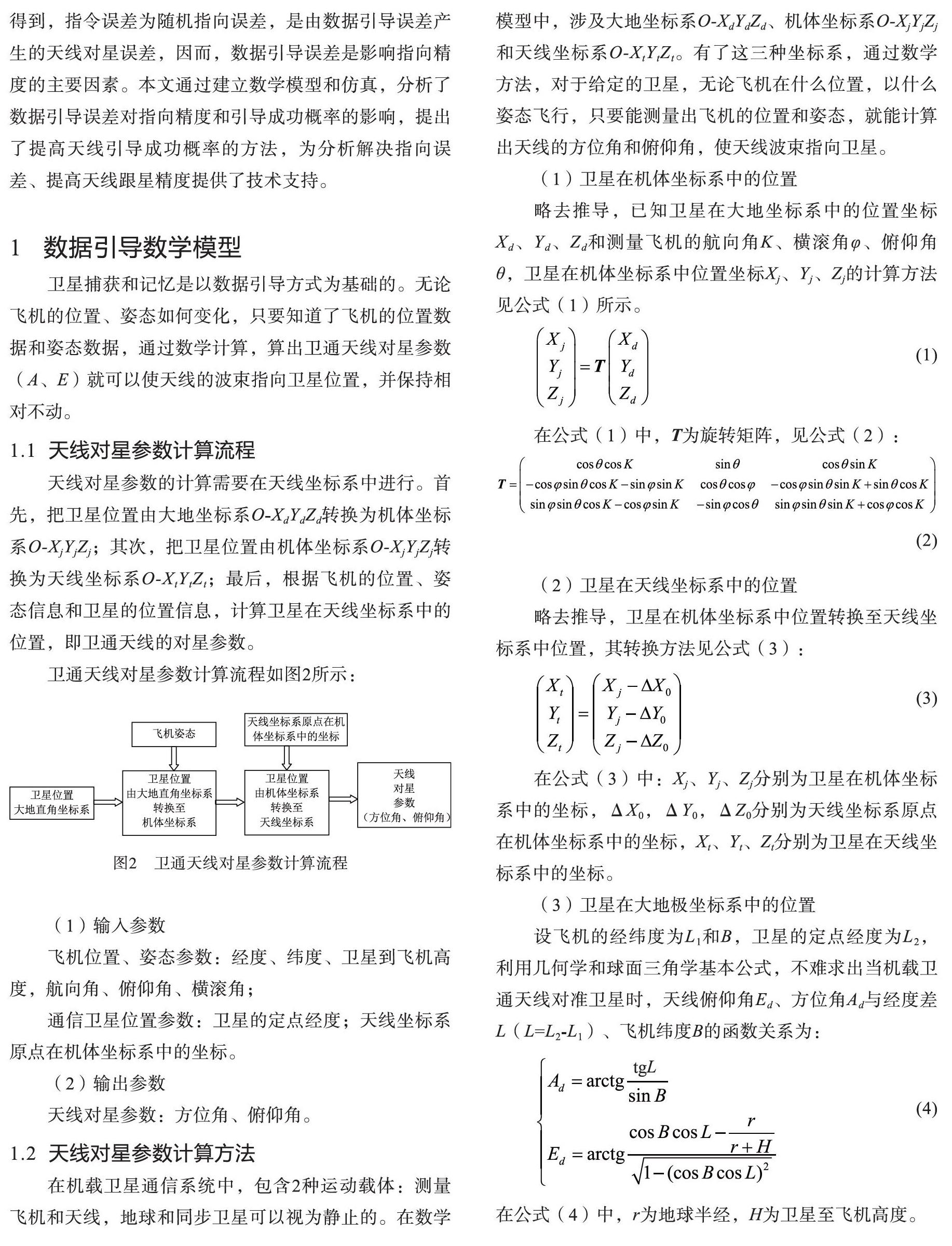
天線對星參數的計算需要在天線坐標系中進行。首先,把衛星位置由大地坐標系O-XdYdZd轉換為機體坐標系O-XjYjZj;其次,把衛星位置由機體坐標系O-XjYjZj轉換為天線坐標系O-XtYtZt;最后,根據飛機的位置、姿態信息和衛星的位置信息,計算衛星在天線坐標系中的位置,即衛通天線的對星參數。
衛通天線對星參數計算流程如圖2所示:
(1)輸入參數
飛機位置、姿態參數:經度、緯度、衛星到飛機高度,航向角、俯仰角、橫滾角;
通信衛星位置參數:衛星的定點經度;天線坐標系原點在機體坐標系中的坐標。
(2)輸出參數
天線對星參數:方位角、俯仰角。
1.2 ?天線對星參數計算方法
在機載衛星通信系統中,包含2種運動載體:測量飛機和天線,地球和同步衛星可以視為靜止的。在數學模型中,涉及大地坐標系O-XdYdZd、機體坐標系O-XjYjZj和天線坐標系O-XtYtZt。有了這三種坐標系,通過數學方法,對于給定的衛星,無論飛機在什么位置,以什么姿態飛行,只要能測量出飛機的位置和姿態,就能計算出天線的方位角和俯仰角,使天線波束指向衛星。
(1)衛星在機體坐標系中的位置
從計算結果看,當衛星定位誤差、編碼誤差、軸系誤差和伺服誤差為固定值時,指向誤差主要與指令誤差有關,是產生指向誤差的根源,當指令誤差時,就能保證天線可靠捕獲衛星和有效記憶。
2.2 ?指令誤差仿真計算模型
由數據引導誤差產生的天線對星誤差稱為指令誤差,指令誤差為隨機指向誤差,是影響指向精度的主要因素。利用指令誤差計算模型就可以研究天線的位置、速度、加速度與飛行航路及飛行姿態之間的關系。
機載衛通天線采用A-E型座架,天線方位、俯仰各軸的運動參數主要由下述參數確定:
(1)飛機姿態參數:橫滾、俯仰、航向;
(2)飛機航行參數:速度、航向;
(3)飛機位置參數:經度、緯度、高度;
(4)衛星參數:東經115°;
(5)飛機巡航速度:800 km/h;
(6)航線:北緯40°、東經120°、高度9 km、半徑20 km的圓。
橫滾、俯仰、航向的位置運動如以下方程所示:
兩組姿態參數分組表征了飛機任務姿態及飛機的動力學極限姿態。
2.3 ?指令誤差仿真計算
測量平臺提供的數據引導誤差呈正態分布,均值為0,方差為σ,根據第1.2節建立的數學模型和第2.2節建立的仿真模型,利用已開發的機載衛通天線仿真訓練系統對測控飛機進行了仿真,對數據引導工作方式和飛機飛行狀態進行了模擬,計算了在不同的姿態數據誤差和位置數據誤差下的天線指令誤差和指向誤差。
(1)仿真一
當衛星定位誤差(0.1°)、軸系誤差(0.05°)、編碼誤差(0.1°)和伺服誤差(0.1°)固定時,指令誤差和指向誤差分析表如表2所示:
(2)仿真二
衛星定位誤差(0.1°)、軸系誤差(0.05°)、編碼誤差(0.1°)和伺服誤差(0.1°)為固定值。當飛機平臺提供的數據引導姿態精度分別為航向角0.4°、俯仰角0.2°、橫滾角0.2°時,分別對甲、乙、丙三地的指令誤差、指向誤差進行了仿真計算,指令誤差和指向誤差分析表如表3所示:
從仿真試驗結果看,一是當引導數據姿態誤差相同時,在不同的地理位置,產生的指令誤差不相同,對指向精度的影響不同;二是在同一地理位置,當引導數據誤差(姿態誤差和位置誤差)不同時,產生的指令誤差不相同,對指向精度的影響不同。經過多次仿真試驗,當引導數據的位置精度優于100 m,姿態精度優于0.5°時,衛通天線就能保證可靠捕獲和有效記憶。
3 ? 數據引導誤差對天線引導成功概率的影響
3.1 ?天線引導成功概率計算模型
自跟蹤是天線伺服系統的主要工作方式,而自跟蹤的前提就是衛星位于天線的3 dB波束內。在測量平臺提供的數據引導下,控制天線克服飛機姿態及位置的變化,使天線主波束對準衛星。天線引導成功概率就是在數據引導方式下,衛星落入天線3 dB波束范圍內的概率。
為了便于計算,首先計算單次引導成功的概率,即單次引導時目標落入天線3 dB波束范圍內概率。由于天線采用對稱切割的拋物面,其主波束截面為一個橢圓,為便于計算,我們以一個近似矩形來代替橢圓域,如圖4所示:
在圖4中,橫軸和縱軸分別為天線的方位軸A和俯仰軸E,中心點O為波束中心位置,θA和θE分別表示天線方向圖的方位和俯仰的半功率波束寬度,σA和σE分別表示方位角A和俯仰角E的隨機指向誤差,即指令誤差,由數據引導誤差產生。顯然,引導成功概率與天線指向誤差及天線波束寬度關系極為密切,減小數據引導誤差,提高指向精度,可提高引導成功概率。
3.3 ?天線引導成功概率計算應用實例
天線指向誤差由隨機指向誤差和系統誤差組成,當方位系統誤差ΔА=0.1°、方位指向隨機誤差σA=0.34°、俯仰系統誤差ΔА=0.1°、俯仰指向隨機誤差σE=0.39°、天線方位和俯仰的半功率波束寬度為θA=θE=2.2°時,根據公式(12)、(13),天線引導成功概率計算結果如下:
PE=0.993,PA=0.742
在矩形域單次引導成功概率為:P=PE·PA=0.736 =73.6%
天線指向目標后,在1 s時間內若可以完成兩次獨立引導,則兩次引導成功的概率為:
由此可看出,天線在數據引導方式下,提高測量平臺的引導數據刷新率,可以提高引導成功概率。
4 ? 結束語
本文分析了數據引導誤差對衛通天線指向精度和天線引導成功概率的影響,為分析解決指向誤差、提高天線跟星精度提供了方法。該方法可應用于工作在數據引導模式下的機載光學系統、機載雷達系統和其它動態系統的跟蹤精度分析。
參考文獻:
[1] ? ? 陳振國,楊鴻文. 衛星通信系統與技術[M]. 北京: 北京郵電大學出版社, 2013.
[2] ? ? 夏南銀,張守信. 航天測控系統[M]. 北京: 國防工業出版社, 2002.
[3] ? ? 張更新,張杭. 衛星移動通信系統[M]. 北京: 人民郵電出版社, 2001.
[4] ? ? ?王海肖. 數理方程[M]. 北京: 高等教育出版社, 1994.
[5] ? ? 宗序平. 概率論與數理統計[M]. 北京: 機械工業出版社, 2010.
[6] ? ? 謝里陽. 冗余系統共因失效機理分析與概率估計[J]. 核科學與工程, 2003,23(6): 186-192.
[7] ? ? 田俊林,潘旭東,游安清. 運動平臺目標引導數據解算及誤差分析[J]. 強激光與粒子束, 2014,26(8): 91-95.
[8] ? ? 王雙平. 機載衛星通信天線引導概率分析[J]. 飛行器測控學報, 2012,31(4): 35-40.
[9] ? ? 祁立學,張萍,楊玲. 地心直角坐標到大地坐標常用轉換算法的分析與比較[J]. 戰術導彈技術, 2006(2): 37-41.
[10] ? 胡丙,華吳衡. 光電經緯儀站址與測角測距誤差校準[J]. 測控技術, 2016(1): 138-140.
[11] ? GERALD L MADER. A Comparison of Absolute and Relative GPS Antenna Calibrations[J]. GPS solutions, 2001(4): 37-40.
[12] ? HOLTSCHMIDT H, KREUSER A,VVERSTEGEN C. Extension of the German database for common cause failure events[J]. Kerntechnik, 2006,71(1/2): 22-40.
猜你喜歡
中國教育技術裝備(2016年20期)2016-12-12 10:09:15
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技資訊(2016年18期)2016-11-15 20:09:22
科技資訊(2016年18期)2016-11-15 07:55:28
價值工程(2016年29期)2016-11-14 02:01:16
電子技術與軟件工程(2016年18期)2016-11-14 00:46:54
數字技術與應用(2016年9期)2016-11-09 23:25:33
數字技術與應用(2016年9期)2016-11-09 22:09:07
科技視界(2016年18期)2016-11-03 21:44:44
科技視界(2016年18期)2016-11-03 20:31:49
