多功能坐便椅的設計
2020-10-27 02:55:04黃詩展余裕浩楊瀚林
機械設計與制造工程 2020年10期
關鍵詞:設計
黃詩展,余裕浩,楊瀚林,姜 峰
(華僑大學制造工程研究院,福建 廈門 361021)
1 研究背景
老年人坐便椅是老齡用品的一種,是為解決如廁困難人群而設計的一種兼具坐便器與椅子功能的輔助性器械。通過調研發現,目前市場在售的老年人坐便椅大多只具有基本功能,對人機工效考慮較少,導致用戶體驗不佳。老人坐便椅可根據折疊與否、高度能否調節、便桶取出方式等進行分類[1]。市面上無靠背和扶手的簡易坐便椅較為常見,但隨著生活質量不斷提高,將逐漸被淘汰。折疊的坐便椅將設計的重點放在了坐便椅的收納功能上,如專利CN210810759U所述的一種兩用折疊坐便椅[2],然而對于長期需要如廁輔助的老人來說沒必要收納。專利CN106235945A所述的一種智能助力坐便椅[3],依靠前設電機控制座位板的升降,可給老人一個起身的助力,然而對老人上半身沒有支撐作用,若老人腿部力量不足,由于自身重力,身體可能會往下滑,因此還需要老人有足夠的手臂力量,否則容易造成事故。專利CN210433391U所述的一種便于老年人使用的坐便椅裝置[4],設計了升降柱與扶手以提供輔助支撐,便捷實用,但依然需老人有足夠的手臂力量才能起身,創新點單一。通過分析相關文獻[5-12],結合目前市場上坐便椅產品進行深入的對比分析可知,多數產品主要存在以下問題:1)功能單一,結構復雜;2)對老人的安全性考慮不充分;3)適用于老人獨自居家生活的產品很少;4)對人機工效考慮較少,老人體驗不佳;5)生產成本較高,價格昂貴,普通家庭無法承受等。
本文運用機械原理知識并結合人機工程學,設計了一款適用于輔助老人獨自居家生活、簡單方便、安全性高的多功能坐便椅。
2 功能實現與設計
2.1 坐便椅設計參數
按照國家標準GB24436—2009規定[13],椅凳類家具的座面高度可以有400 mm、420 mm、440 mm 3種規格,椅子座深尺寸范圍350~400 mm,靠背的高度480~630 mm,寬度350~480 mm。休息扶手高度一般取200~230 mm,兩扶手的間距可取500~600 mm。
普通的家用馬桶尺寸如圖1所示。
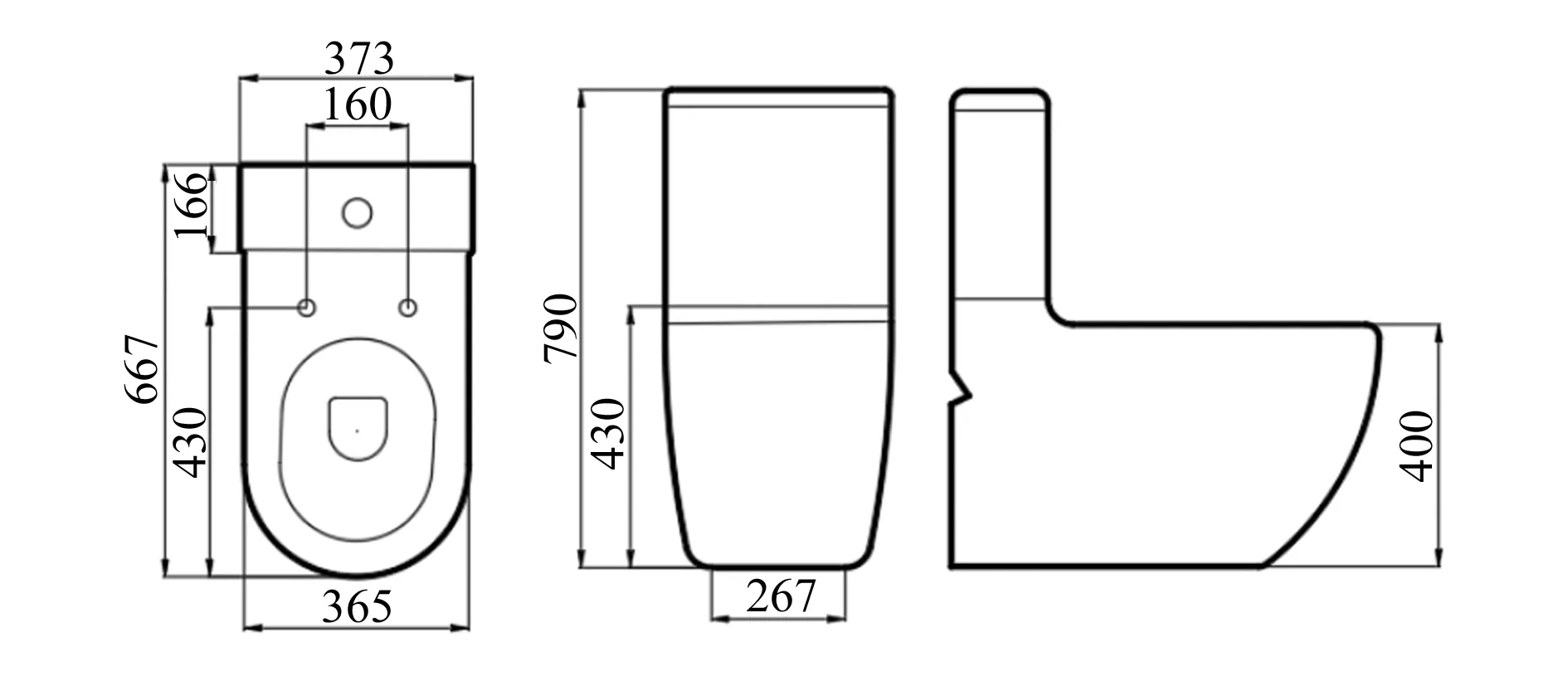
圖1 普通馬桶尺寸
綜合考慮座椅國標和普通馬桶尺寸,坐便椅座面高度取460 mm,座寬取420 mm,座深取420 mm。兩腋托間距選取410 mm,坐便時腋托到座面距離為(470±50)mm,站立時腋托距離地面為(1 310±50)mm,坐便時雙腳抬起160 mm。
2.2 動力源選擇
考慮輔助老人起立和坐下過程中,座位板需要推力完成折疊和展開功能,故選用電動推桿電機。電動推桿電機是一種將電機的旋轉運動轉變為推桿的直線往復運動的電力驅動裝置,可作為執行機械用于各種簡單或復雜的工藝流程中,以實現遠距離控制、集中控制或自動控制。
根據椅子的參數,綜合考慮一般人的質量、老人的安全保障和椅子模型的搭建效果,選擇工作電壓為12 V、空載速度為10 mm/s、最大推力為900 N、行程為400 mm的電動推桿電機。
2.3 機械結構設計
坐便椅產品設計三維圖如圖2所示。坐便椅設計整體由以下幾個部分組成:支架1、腋下機構2、腳踏機構3、電動推桿4、四邊形連桿機構5、座位板6、靠背7及腋下-腳踏聯動機構。

1—支架;2—腋下機構;3—腳踏機構;4—電動推桿;5—四邊形連桿機構;6—座位板;7—靠背圖2 產品設計三維圖
1)上下身機構設計。
上下身機構由靠背、座位板、電動推桿、平行四邊形連桿機構等組成。在靠背的兩側,通過一旋轉軸連接桿的兩端裝配腋下機構。靠背與座位板垂直連接,隨座位板作動。
電動推桿電機通過三角支撐板和鉚釘固定在座椅的兩側,作為整個裝置的唯一動力源。利用電動推桿電機可雙向分段運動的特點,其既能夠推座位板作動,也能推腳踏連接桿作動。
為方便老人安全使用坐便椅,座位板兩側還裝有扶手,以提高穩定性和安全性。座位板兩側設計兩組平行四邊形連桿機構,利用平行四邊形容易變形的原理,實現座椅的展開和折疊功能。平行四邊形連桿機構由4根連桿和4個鉸鏈依次連接而成。
2)變胞機構設計。
利用電動推桿可雙向分段運動的特點,通過約束其自由度的變化,構成變胞機構,實現腳踏板和座板先后順序工作的功能。當坐便椅處于圖3中的第三種狀態時,電動推桿處于原始狀態,為零伸縮量。當使用者按下電源后推桿將伸長,推桿兩端都處于自由無約束的狀態,但由于使用者與座板的自身重力載荷遠大于腳踏連接桿對推桿的作用力,因此推桿上端作動被限制,優先推動下方的連桿,腳踏板向下運動至觸地。此時地面對連桿的反作用力遠大于人體的自身重力載荷,于是推桿開始反向推動座板和靠背,使老人站立。在此過程中,推桿的自由度由2變成了1,其全程狀態變化如圖3所示。
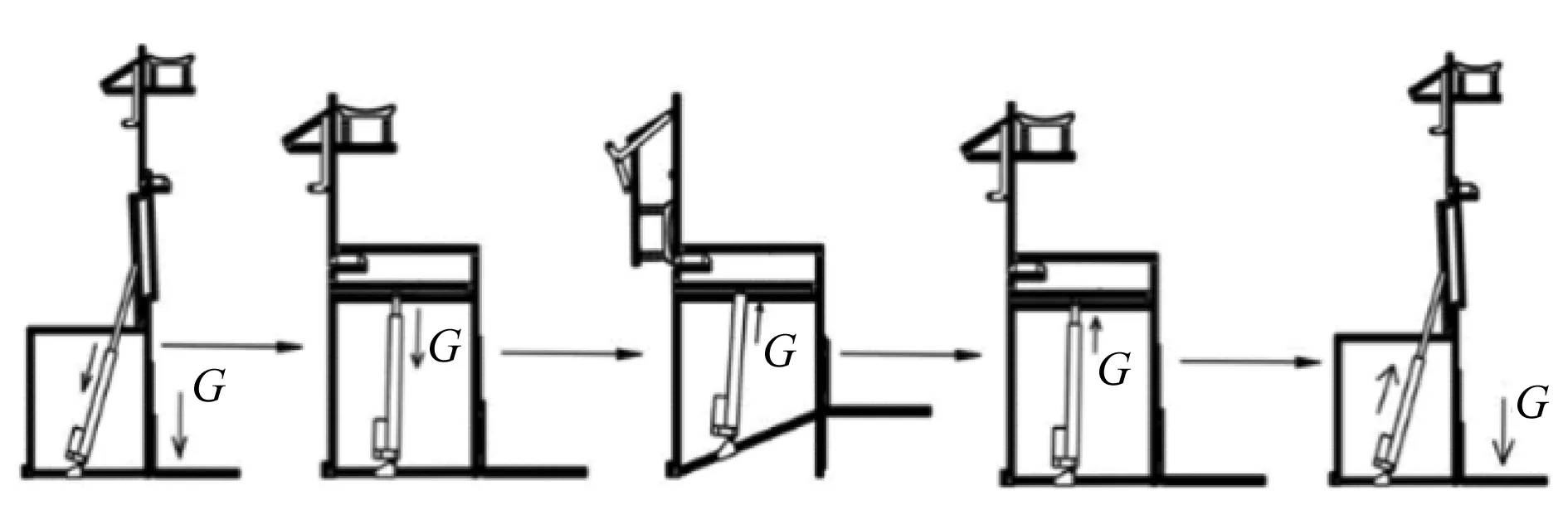
圖3 使用過程作品的狀態變化
3)腋下機構設計。
為減輕老人如廁時坐下和起身過程中克服自身重力的負擔,設計了腋下機構。腋下機構由死點機構、腋下支撐等組成。另外,在老人完全坐下后,已不再需要腋下支撐,因此設計腋下機構可自行回收,當需要用時再彈出,不干涉老人活動,從而提高座椅的舒適度。
死點機構為平面四連桿機構,如圖4所示,長連桿(a1)可與機架(a2)一起繞點d旋轉、與短連桿一起繞點b旋轉,腋托桿(a4)可與機架(a2)一起繞點a旋轉、與短連桿(a3)一起繞點c旋轉。當長連桿(a1)旋轉至豎直狀態時,短連桿(a3)恰好也豎直,則b,c,d三點共線,處于死點位置,腋托桿(a4)受力后長連桿(a1)不可旋轉。
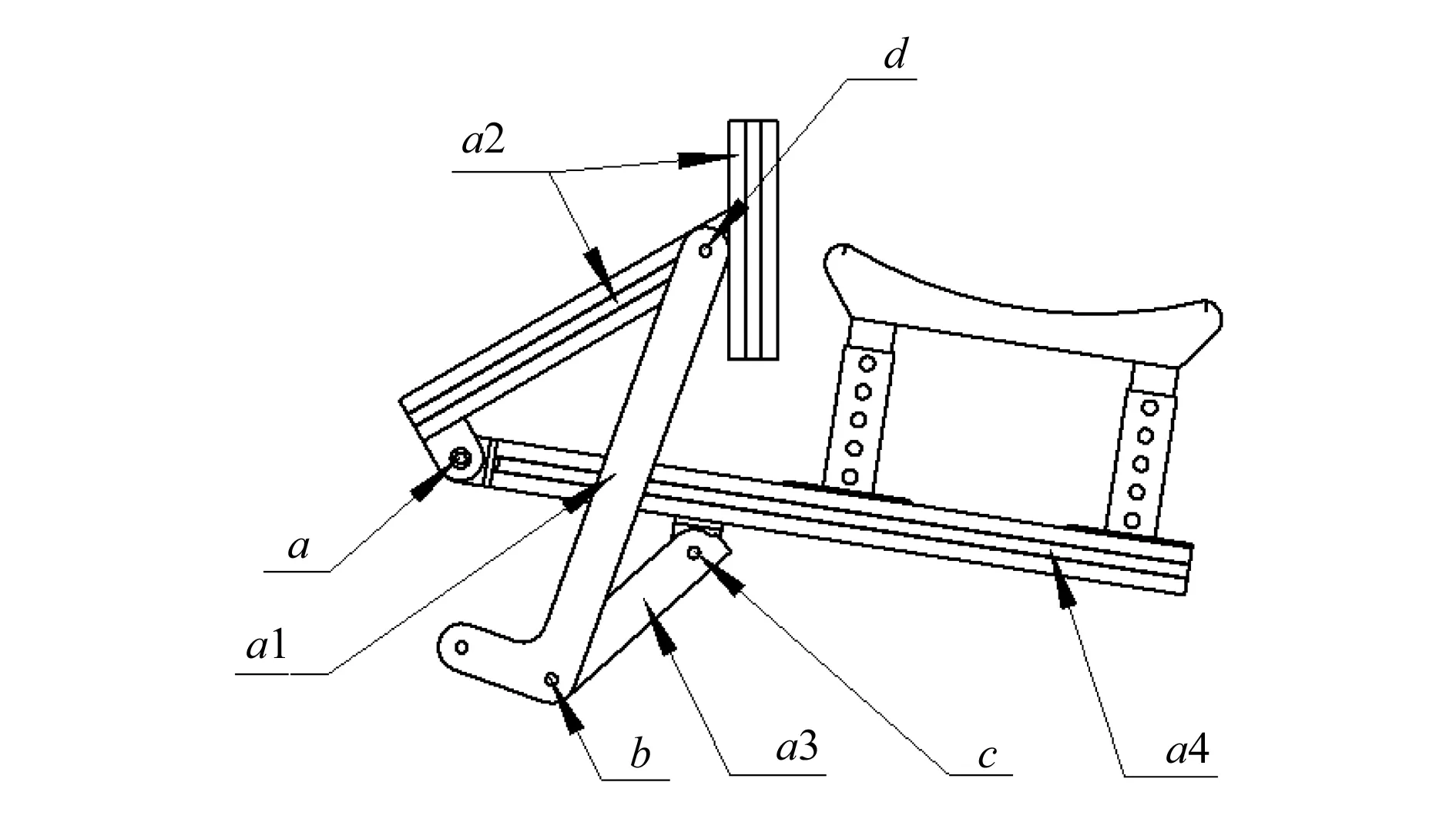
圖4 腋下死點機構
彈片套筒通過腋下支撐固定在腋托桿(a4)上,腋下支撐通過彈片固定在套筒里面。采用彈片實現腋下支撐高度可調節,使坐便椅適用于不同身高的老人,提高裝置的適用性。
4)腳踏機構設計。
為提高老人如廁時的利便效果,考慮在老人坐下時將腳抬起,為此設計了腳踏機構。腳踏機構由腳踏板、腳踏靠板和滑軌等組成,如圖5所示。腳踏機構通過腳踏板與靠板垂直連接。靠板與裝置之間設置有滑軌,以實現腳踏板升降功能。該功能使老人排便時,更容易產生排便反射,肛直角更大,直腸前突深度更小,會陰下降程度更大,從而改善排便意愿[14],不同體位對排便的影響如圖6所示。
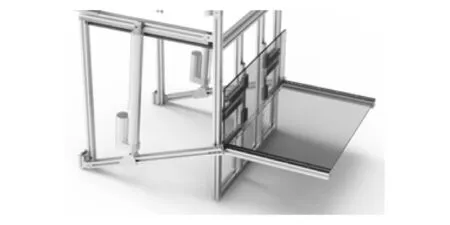
圖5 腳踏機構設計

圖6 不同體位對排便的影響
在腳踏連接桿上設置滑槽,滑槽通過滑桿與腳踏板固定連接,滑桿置于滑槽內,可以自由移動。電動推桿通過三角支撐板與腳踏連接桿固定,推桿可拉動腳踏連接桿運動,通過滑桿在滑槽內的移動,實現腳踏板的升降功能。
5)腋下-腳踏聯動機構設計。
為充分體現機械創新設計,巧妙設計了腳踏-腋下聯動機構,通過柔性連接,將鋼絲繩的兩端分別固定在腋下連接桿和腳踏上,以實現聯動。
當腋下支撐由豎直狀態變換為水平狀態時,聯動腳踏板下降,順應老人起身過程;當腋下支撐由水平狀態變為豎直狀態時,聯動腳踏上升,順應老人坐下過程。
6)電控系統設計。
推桿電機作為本裝置的唯一動力源,在左右扶手上分別設置座椅的啟動按鈕,為推桿電機提供驅動。左手按鈕為座椅的展開開關,即起身輔助作動;右手按鈕為座椅的折疊開關,即坐下輔助作動。采用點動的驅動方式,可隨時急停,保證坐便椅使用時的安全性,電路圖如圖7所示。
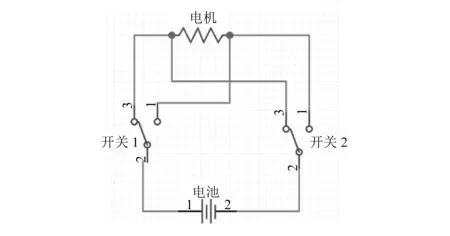
圖7 電路圖
完整作品的三維圖如圖8所示。

圖8 作品模型
3 設計計算與校核
3.1 總體尺寸設計
本裝置的最大特點在于坐便和站立兩種狀態的轉換,因此只有設計好結構尺寸才能合理、協調地實現其功能。坐便椅設計參數見2.1節。該參數可適用于絕大多數老年人及市面上絕大部分馬桶,且從坐便切換至站立無尺寸不適。
3.2 最大載重計算
坐便椅原動件為兩根相同的電動推桿,原長400 mm,行程300 mm,通電后速度v=10 mm/s,推桿以恒速率伸長,最大推力F推=900 N。
機械結構簡圖如圖9所示,數學計算簡圖如圖10所示。由于推桿以恒速率伸長,故機構在運動中達到動態平衡狀態。忽略機構運動中的摩擦力,得
2F推L1=GL2
式中:F推為電動推桿的推力;G為最大的老人載重;L1和L2分別為F推、G對點B的力臂長度。
利用SolidWorks軟件測得BC=207 mm;BA=571.3 mm;∠DBA= 64.7°。
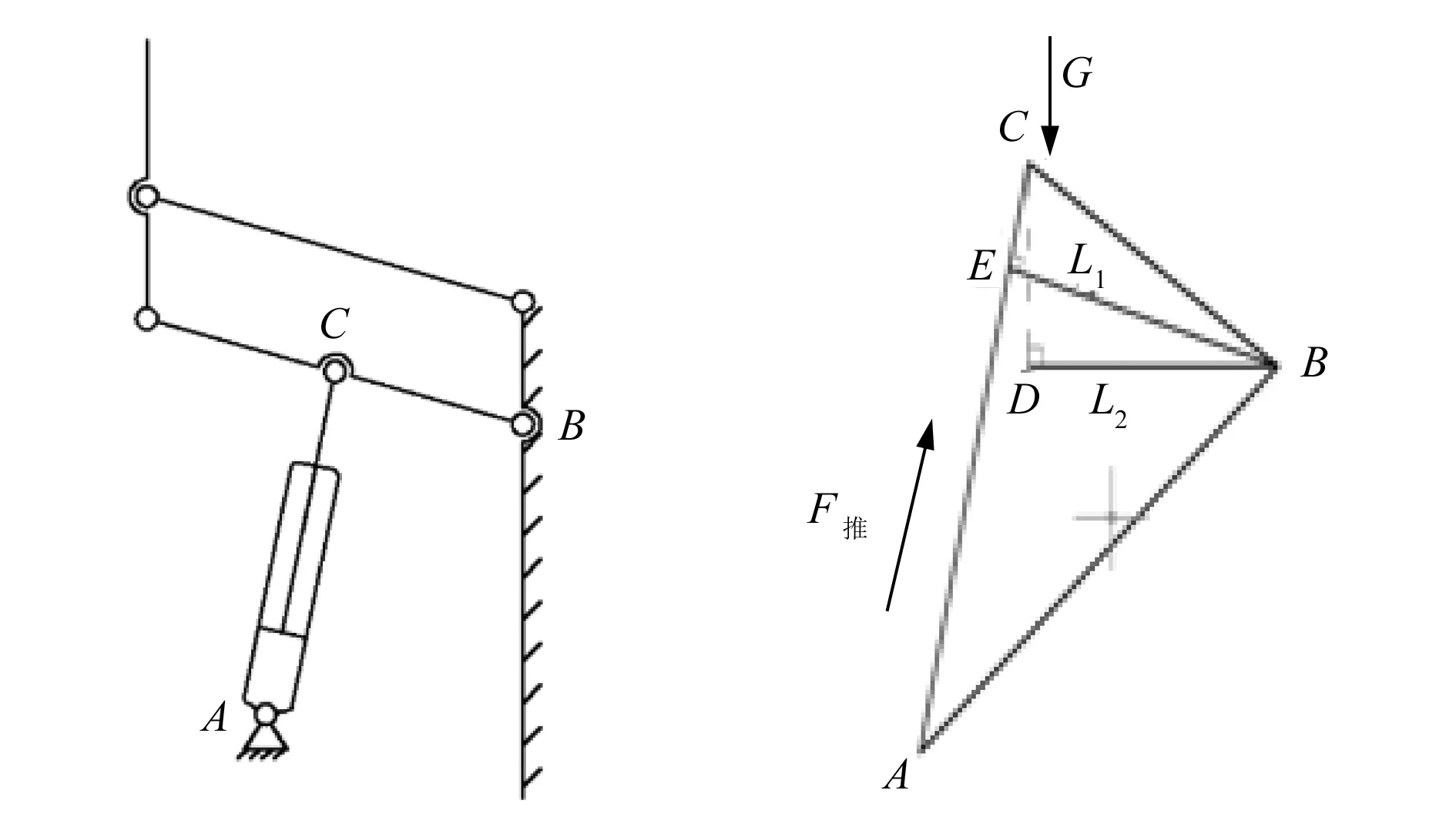
圖9 機械結構簡圖 圖10 數學計算簡圖
坐便椅最大載重計算過程如下:
∠A=90°-∠ACD-∠DBA=25.3°+∠DCB-∠ACB
設∠DCB=x,得
3.3 機構運行時間計算
式中:△l1為腳踏放下時電動推桿的長度變化量。
完全站立所需時間t2:
式中:△l2為從腳踏放下到電動推桿完全伸出的長度變化量。則從坐便到站立所需時間t:
t=t1+t2=30 (s)
3.4 電池續航能力計算
本坐便椅搭載12 V、5 600 mAh鋰電池,機構原動件為兩根額定功率P為30 W的電動推桿。電池續航能力計算公式如下:

式中:n為一次充電裝置的使用次數;U為電動推桿的額定功率;P為電動推桿的額定功率;C為鋰電池容量。因此,一次充電可供使用134 次。
3.5 主要承力桿強度校核
座椅的支架所采用材料為6063-T5鋁型材,截面如圖11所示,其屈服極限為σ0=145 MPa。通過三維軟件分析,座椅的主要受力部位為座位板和腳踏起重桿,座位板的最大承重已由3.2節所述,此處校核腳踏起重桿是否安全。
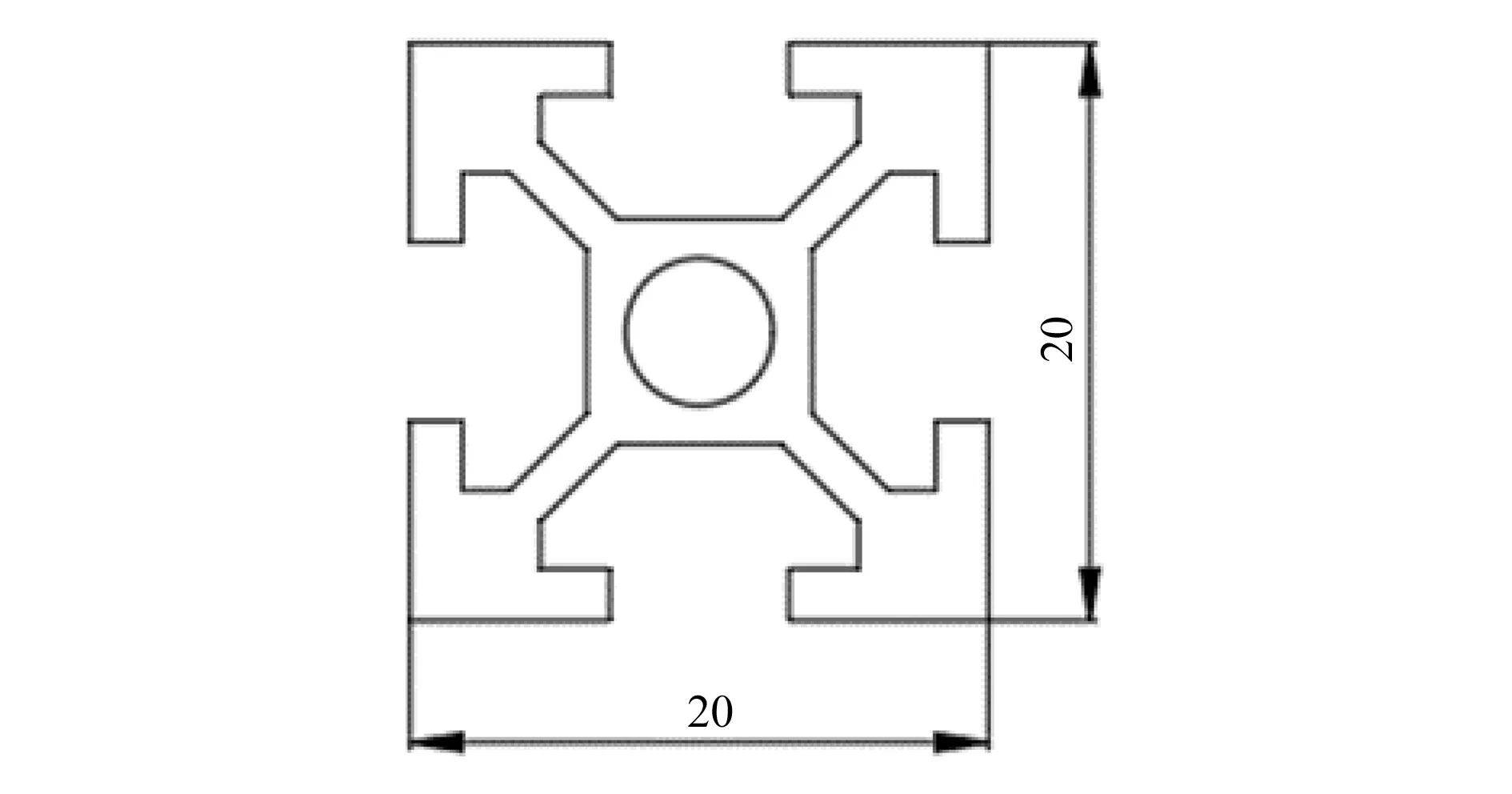
圖11 鋁型材橫截面
腳踏起重桿的裝配示意簡圖如圖12所示,取人的體重為80 kg,單邊推桿電機以拉力F作用在起重桿上。按我國男性青年體質分布計算,小腿及足的質量約占體重的4.5%[15]。則腳踏單邊桿受力F2為
The optical transmittance, T, can be obtained from the general formula[16–18],

圖12 腳踏起重桿的轉配示意圖
起重桿離地的瞬間為最大承力狀態,受力簡圖如圖13所示。圖中L1=173 mm,L2=257 mm,L3=43 mm。
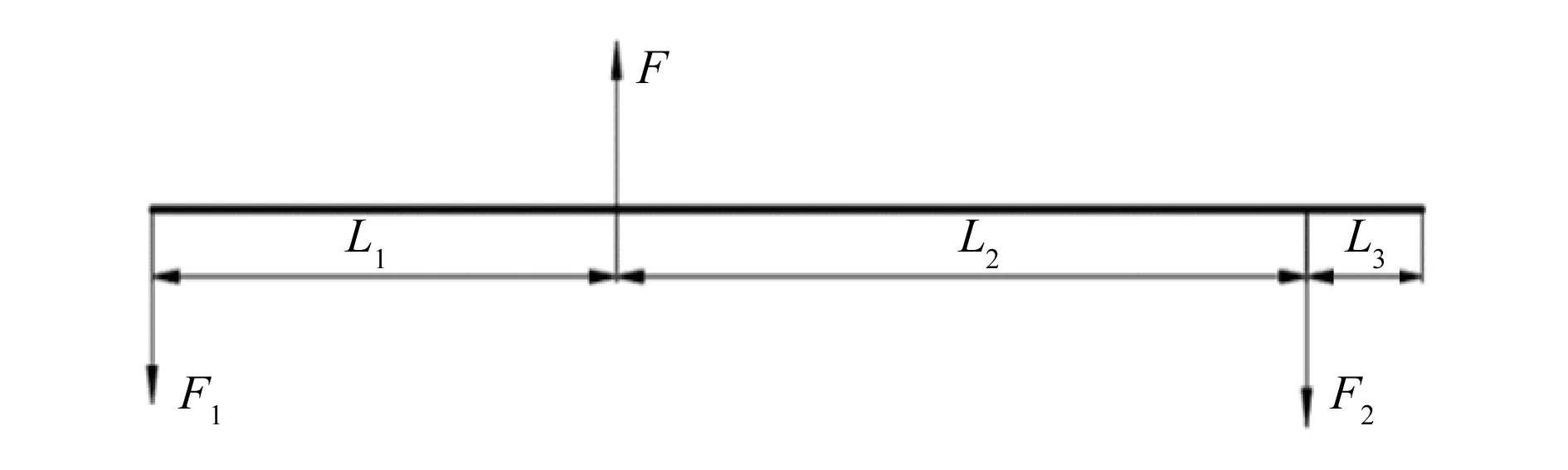
圖13 受力簡圖
由力矩關系可知:
FL1-F2(L1+L2)=0
由此可得:
利用AutoCAD軟件的面域功能,計算得到桿的截面慣性矩Iz=7 449 mm4。
通過力學分析,可知最大危險截面位于F作用點處,由正應力計算公式得
式中:σ1為該點處的正應力;M為該截面上的彎矩;y為該點到中性軸的距離。
取安全系數為1.5[16],則
故腳踏起重桿滿足安全校核。
4 操作流程
在使用坐便椅時,首先根據使用者的身高,按下腋下彈珠,調節合適的腋下高度。如圖14所示,裝置開始狀態為站立姿勢,使用者站到腳踏板16上,雙臂自然放在腋下支撐2上,手握在扶手28上。
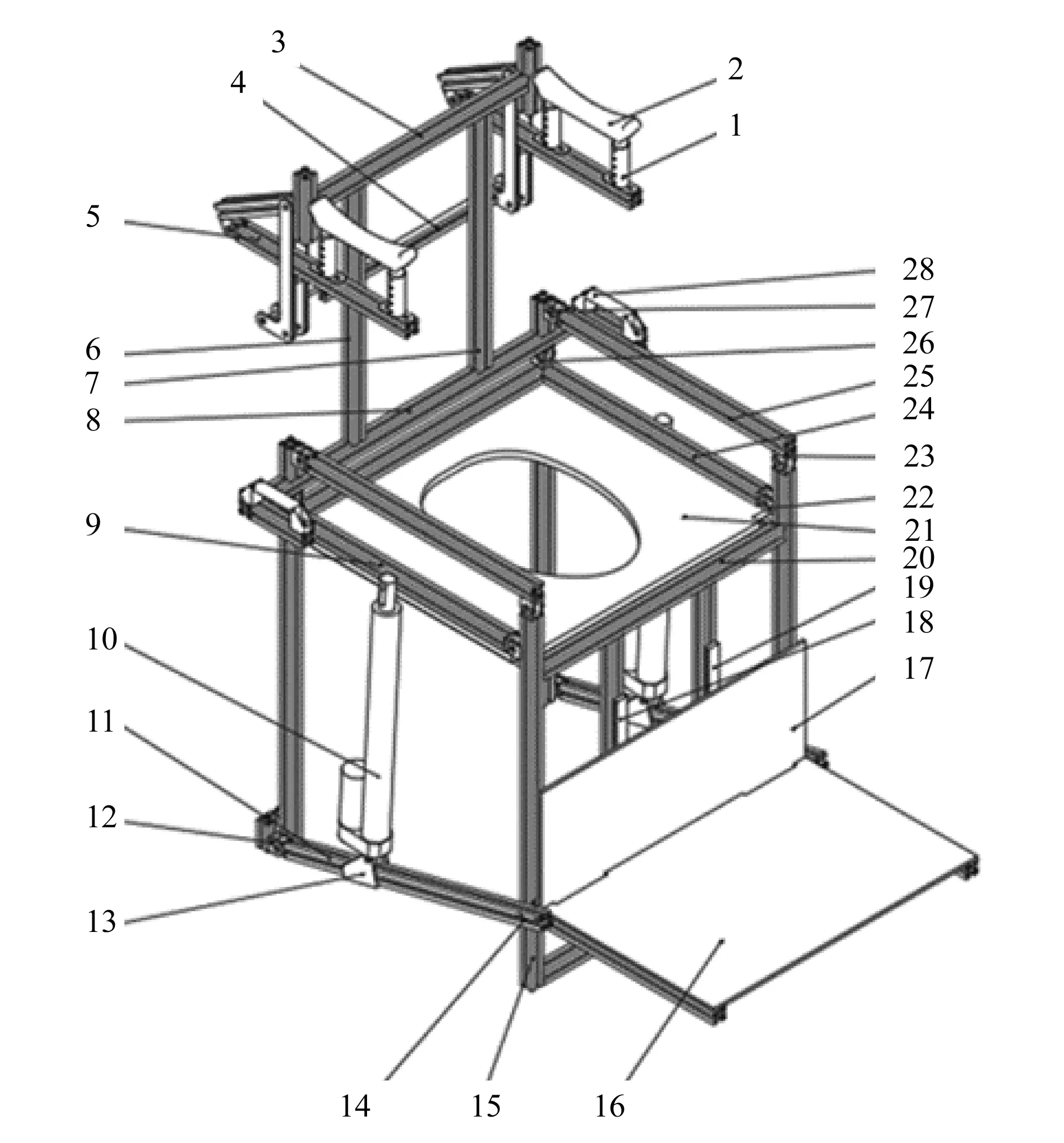
1—金屬彈片套筒;2—腋下支撐;3—靠背;4—腋下支撐連桿;5— 腋下機構;6,7,8,15,20—支架連接桿; 9,24—座位板起重桿;10— 電動推桿;11—腳踏起重桿;12,22,23,26,27—連接鉸鏈;13—三角 板;14—銷釘;16—腳踏板;17—腳踏背板;18,19—滑軌;21—座位 板;25—四連桿機構;28—扶手圖14 作品三維裝配圖
使用者手握扶手,左手大拇指按動左扶手上的啟動按鈕,電動推桿10開始作動,拉動座位板起重桿,平行四邊形開始變形,座位板21向下翻轉,直至座位板處于水平狀態,使用者完全坐下,座位板限位制動,電動推桿開始反向向上拉動腳踏起重桿11,腳踏板16上升,將使用者的腿部抬高,由于腳踏機構與腋下機構5聯動,此時腋下機構順時針旋轉,腋下支撐垂下收回,不干涉使用者如廁,至此使用者坐下過程結束,進行如廁。
如廁完畢,使用者起身過程如下:雙手握住扶手28,右手大拇指按動右扶手上的啟動按鈕,電動推桿10開始作動,由于人體重力載荷,推動座位板21需要的力遠遠大于推腳踏起重桿11的力,因此電動推桿首先推動腳踏起重桿11向下作動,腳踏板16下降,此時腋下機構5逆時針旋轉并慢慢到達死點位置,直至腳踏起重桿11和腳踏板16都著地,由于受到地面的反向作用力,電動推桿開始反向推動座位板起重桿9,平行四邊形變形,座位板向上翻轉,和靠背一起推著使用者起身,直至完全站立,使用者離開,整個使用過程結束。
5 創新性和應用前景
5.1 創新點
1)折疊功能實現巧妙。利用兩組平行四邊形連桿機構,實現座位板的旋轉和靠背的移動,座椅展開和折疊靈活順暢,互不干涉。
2)將各部件之間進行聯動,動力源唯一。僅用一對推桿電機作為動力源,實現了整個裝置的功能。其中,設計了巧妙的機械聯動機構,將座板、腳踏、靠背、腋下有機結合在一起,不僅實現了機構功能,且機械結構簡單清晰,耗材少、成本低。
3)利用柔性連接實現腳踏和腋下的遠距離聯動。將鋼絲繩的兩頭分別固定在腋下連接桿和腳踏上,實現聯動。當腋下支撐由豎直狀態變換為水平狀態時,聯動腳踏板下降,順應老人起身過程;當腋下支撐由水平狀態變為豎直狀態時,聯動腳踏上升,順應老人坐下過程。
4)腋下機構設計死點機構,安全性能高。腋下機構設計了死點機構,當腋下支撐處于水平狀態時,形成“三點一線”的死點機構,這時候使用者上半身質量基本由腋下機構支撐,充分保障了腋下機構的承載能力和座椅的安全性能。
5)腋下支撐高度可調節,應用范圍廣。將彈片套筒固定在腋托桿(圖4中a4)上,支撐塊通過彈片固定在套筒里面。采用彈片實現腋下支撐高度可調節,適用于不同身高的老人,提高了裝置的適用性。
6)利用變胞機構實現機構運動的先后順序。利用推桿電機可雙向運動的功能,結合裝置的自由度分析,使推桿電機先后作用于座位板和底下連接桿,驅動坐便椅實現所有聯動功能。
5.2 應用前景
隨著我國人口老齡化的不斷發展,社會對老人的關注度不斷提升,市場上對老年人用品的需求也日益旺盛。然而我國對于智能坐便椅的研究尚處于摸索階段,因此坐便椅具有良好的應用前景。通過調研發現,現有的一些幫助老人如廁的產品無法做到比較全面的功能實現。與市面上現有的坐便椅產品相比,本文設計的多功能坐便椅憑借以下優點具有更為良好的應用前景:
1)輔助程度高。可幫助老人獨立居家生活,輔助如廁坐下和站立的完整過程。
2)安全性高。腋下機構具有死點位置,足以支撐老人的身體,防止摔倒。
3)結構簡單可靠。原動件少,傳動為連桿傳動,后續維修難度小。
4)應用范圍廣。適用于不同身高、不同年齡的老人,與市面上的馬桶適配。
5)操作簡單。老人僅需操作左右兩個開關即可。
6)人性化設計。抬高了老人雙腳,解決了老人使用馬桶排便難的問題。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
