一種抗眩暈訓練平臺三自由度并聯機構優化設計
2020-10-27 02:55:02曹建平王海東高富東
機械設計與制造工程 2020年10期
關鍵詞:優化
曹建平,王海東,高富東
(海軍航空大學青島校區, 山東 青島 266041)
抗眩暈訓練是海軍艦艇人員的必備訓練科目,目前訓練器材局限于滾輪、旋梯及浪木等手動式裝置,這些裝置僅能進行單方面的往復運動,無法模擬復雜海況下船舶多方向運動引起的機體眩暈感,因此設計一種能模擬船舶多自由度運動的訓練平臺非常必要。考慮到承載能力和運動精度,復雜海況下船舶運動模擬平臺一般基于并聯機構設計,包括六自由度[1]、三自由度[2]、二自由度[3]并聯機構。人員暈船是由船舶的周期性振蕩引起的,船舶的六自由度運動中,只有垂蕩、橫搖和縱搖運動是純粹的振蕩運動,因此三自由度并聯機構更適用于抗眩暈訓練。
靈巧度是衡量并聯機構輸入與輸出運動之間傳遞精度和評價機構運動學性能的重要指標[4],眾多學者以靈巧度為指標對并聯機構進行了優化設計。針對單一指標評定靈巧度的局限性,陳修龍等[5]定義了一種能綜合評價不同位形下并聯機構靈巧度的指標——平方平均靈巧度系數。于凌濤等[6]提出了全域空間條件數均值與全域空間條件數波動值的綜合靈巧度指標。作為優化問題評價指標時,靈巧度必須考慮全域范圍的值,在定義全域值時一般都是基于工作空間計算,而三自由度并聯機構可達工作空間較小,因此還應考慮可達工作空間每個位置所有姿態下的復合靈巧度,這樣的評價對優化設計更具有指導意義。
在優化設計算法方面,馬致遠等[7]采用差分進化算法對一種三平移并聯機構進行多目標優化,魯凱等[8]采用遺傳算法對8-SPU并聯機器人進行優化,Cahill等[9]對二自由度并聯機構提出了一種幾何代數方法。Wang 等[10]利用多目標粒子群(MOPSO)算法對平面三自由度并聯機構進行優化。人工蜂群算法(artificial bee colony,ABC)是Karaboga等[11]于2005年提出來的一種群智能全局優化算法,可應用于多種工程優化問題,但目前在并聯機構的優化設計方面應用不多。
本文設計了一種新的用于抗眩暈訓練的2UPS-PU并聯機構,給出位置反解和運動速度雅克比矩陣,證明了該機構的線速度條件數恒為1,為衡量角速度的靈巧度,提出了離散型全姿態空間條件數指標,并以此指標為目標函數,采用人工蜂群算法對2UPS-PU并聯機構結構參數進行了優化。
1 2UPS-PU并聯機構
1.1 機構描述
如圖1所示,并聯機構包括動平臺B1B2B3和固定平臺A1A2A3,動平臺B1B2B3通過2個結構完全相同的無約束主動支鏈AiBi(i=1,2)和1個恰約束主動支鏈A3B3與固定平臺A1A2A3連接。動平臺B1B2B3和固定平臺A1A2A3分別呈等腰直角三角形。恰約束主動支鏈A3B3一端通過萬向鉸B3與動平臺B1B2B3相連接,另一端與固定平臺A1A2A3固定連接,用來限制動平臺的搖艏、橫蕩和縱蕩運動。無約束主動支鏈A1B1和A2B2一端通過萬向鉸B1和B2與運動平臺B1B2B3相連,另一端通過球鉸A1和A2與固定平臺A1A2A3相連,當移動副L1,L2和L3伸縮時可以使動平臺實現既定的橫搖、縱搖和垂蕩運動。

圖1 2UPS-PU并聯機構結構簡圖
1.2 位置反解
當已知機構動平臺的位置和姿態時,求解機構主動件的位置稱為位置反解。建立如圖1所示的坐標系,設R:OXYZ為固定在固定平臺上的基礎坐標系,R′:oxyz為固定在動平臺上的動坐標系,動平臺A1A2A3和固定平臺B1B2B3邊長分別為r和R。Ai(i=1,2,3)為點Ai的位矢,Bi(i=1,2,3)為點Bi的位矢,φ為矢量A3B3與固定平臺的夾角,θ為矢量A3B3在固定平臺的投影與矢量A1A2的夾角。下文約定c、s、ct分別表示cos、sin和ctan。
運動坐標系原點B3(o)在基礎坐標系下表示為:
(1)
式中:z為位矢B3相對于固定平臺B1B2B3的垂線高度。
位矢Ai在基礎坐標系下表示為:
(2)
位矢Bi在動坐標系下表示為:
(3)
則位矢Bi在基礎坐標系下表示為:
(4)
其中:
式中:T為動坐標系R′與固定坐標系R的坐標變換矩陣;α,β為動平臺繞萬向鉸鏈兩個轉軸轉動的姿態角。
將式(1)、(2)代入式(4)可得位矢Bi在基礎坐標系R:OXYZ下的坐標為:
(5)
設機構3個移動副長度為li(i=1,2,3),則有:
(6)
將式(5)代入式(6)中并展開,可得:
(7)
由式(7)可進一步求解:
(8)
式(8)即為該并聯機構的位置反解方程。
1.3 速度分析
設q為動平臺輸出速度向量,p為各支鏈的輸入速度向量,且有:
(9)
(10)
則并聯機構的速度約束方程寫成:
Aq=Bp
(11)
式中:A和B為3×3矩陣。則式(11)可進一步寫成:
q=Jp
(12)
式中:J為速度雅可比矩陣。
J=A-1B
(13)
對式(8)進一步求導整理可得2PUS-U并聯機構動平臺的速度方程:
(14)
整理后矩陣A和B可以表示為:
(15)
(16)
式中:
M=Rsβ-zcβ-zctφcθsβ,
N=z-rsβ+rctφcθcβ-Rctφcθ+zct2φ,
P=Rsα+zcαcβ-zsαctφsθ+zctφcθcαsβ,
Q=z+rsαcβ+rctφsθcα-Rctφsθ+zct2φ+rctφcθsαsβ。
根據式(13)可求出速度雅可比矩陣J,可知J與R,r,φ,θ,α,β和z有關,其中R,r,φ,θ是2UPS-PU并聯機構的設計參數,α,β和z是動平臺的位置和姿態參數。
2 優化數學模型
2.1 靈巧度評價指標
評價靈巧度的指標一般包括可操作度和條件數,利用可操作度評價存在一定的缺陷[12],因此本文采用雅可比矩陣的條件數作為評價2UPS-PU并聯機構靈巧度的指標。雅可比矩陣條件數可表示為:
k=‖J‖‖J-1‖
(17)
式中:k為雅可比矩陣條件數,1≤k<∞。
如果速度雅可比矩陣的條件數較大,則該矩陣的逆矩陣J-1精度較低,此時利用式(13)求驅動器輸入速度時,會使輸入和輸出速度之間的傳遞關系嚴重失真,另外驅動器的輸入速度的微小偏差將會導致并聯機構的輸出速度出現較大偏差,因此在進行機構設計時,應該使得該機構速度雅可比矩陣的條件數在其操作范圍內盡量為較小的值。當k=1時,并聯機構具有最佳的運動傳遞性能,此時稱并聯機構的這一形位為運動學各向同性。當雅可比矩陣條件數為無窮大時,并聯機構處于奇異形位,因此雅可比矩陣條件數可用來度量并聯機構的靈巧度。
2UPS-PU并聯機構輸出速度向量中同時存在線速度和角速度,即有:

(18)
式中:ν為動平臺的線速度向量;ω為動平臺的角速度向量。由于ν和ω具有不同的量綱,利用雅可比矩陣J的條件數評價靈巧度不夠準確,因此式(18)可以改寫為如下形式:
(19)
式中:Jω,Jν分別為角速度和線速度雅可比矩陣。則Jω與Jν的條件數可定義為:
(20)

(21)
可以證明,對于2UPS-PU型并聯機構,其kJν值恒為1,證明如下。
證明:
由式(9)~(12),可知:
(22)
由于在2UPS-PU型并聯機構中,φ值不可能取0,因此:
(23)
因此矩陣Jν是行滿秩矩陣,其廣義逆為:
(24)
將式(22)代入式(24)后,可得:
(25)
則可得:
(26)
證畢。
由此可知,2UPS-PU型并聯機構在線速度上是各向同性的,因此在優化上應使角速度條件數kJω盡量靠近1。單個kJω值是對應于動平臺特定位置的,不能用來衡量整個運動空間的靈巧度,為此Gosselin等[13]定義了全條件性指標ηJω,用以評價機構在可達工作空間的角速度靈巧度:
(27)
式中:ηJω為機器人的角速度全條件性指標,0≤ηJω≤1;W為動平臺的可達工作空間。事實上式(27)的數學意義是雅可比矩陣的條件數kJω的倒數在可達工作空間上的平均值。ηJω值越大,并聯機構的靈巧度和控制精度越高。由于ηJω的精確解獲取很困難,因此Pusey[14]定義了離散型全域條件數:
(28)

上述定義都是面向可達工作空間的,但實際上2UPS-PU并聯機構的可達工作空間比較小,以圖1中動平臺參考系原點o為參考點,其可達工作空間為一條線段,長度由移動副L3的桿長限制。因此為了全面衡量機構的角速度條件數,還應考慮每一個可達位置上點的姿態,為此需要在全姿態空間[15]上進行定義。

(29)
式中:wp為姿態空間上點的數目;分子為姿態空間網格中對應點的條件數的倒數之和。
2.2 數學模型

(30)
式中:Lmin≤Li≤Lmax(i=1,2,3)表示桿長限制;θHi≤θH max i(i=1,2,3)表示虎克鉸限制;θSi≤θS max i(i=1,2)表示球鉸限制。
3 基于人工蜂群算法的優化
3.1 人工蜂群算法
人工蜂群算法仿生蜜蜂群體采蜜時各個蜂種之間的配合,以找到最優采蜜位置。該算法控制參數少,全局尋優性好,收斂速度快,具有非常好的優化搜索特性,可以有效解決實際工程問題。
人工蜂群算法的搜索模型包括蜜源、引領蜂、跟隨蜂和偵查蜂。其中,蜜源代表問題的可行解;引領蜂與蜜源一一對應,用來存儲蜜源的相關信息,并將這些信息以一定的概率與其他蜜蜂分享;跟隨蜂與引領蜂分享相關信息進行局部搜索找到新蜜源;搜索一定次數找不到更好的蜜源后,由偵查蜂進行隨機全局搜索找到新蜜源,以跳出局部最優值。算法的具體步驟如下[16]:
Step1,初始化算法的基本參數(問題維數D、最大迭代次數ItMax、蜜源數目nPop、丟棄限度L,按照式(31)為每一個蜜源設置隨機值:
Xi,j=Xmin,j+r(Xmax,j-Xmin,j)
(31)
式中:Xi,j為第i個蜜源代表的可行解中的第j維值,即原蜜源,其中i=1,…,nPop,j=1,…,D;Xmin,j,Xmax,j分別為第j維值的下限和上限;r表示[0,1]的隨機值。
Step2,每一個引領蜂對相應的蜜源隨機選擇除本身以外的另一個蜜源,按照如下公式計算新蜜源的位置:
Vi,j=Xi,j+φi,j(Xi,j-Xk,j)
(32)
式中:Vi,j為新蜜源;Xk,j為隨機選擇的蜜源;φi,j表示[-1,1]范圍內的隨機值。用新蜜源的適應度值與原蜜源的適應度值比較,如果大于則更新,否則計數加1;
Step3,每一個跟隨蜂按照輪盤賭法選擇一個蜜源,再隨機選擇一個除本身以外的蜜源,按照式(32)局部搜索新蜜源,計算新蜜源的適應度值,如果大于原蜜源適應度值則更新,否則計數加1;
Step4,偵查蜂檢測每個蜜源的更新計數,如果連續L次沒有得到更新則拋棄蜜源在全局重新搜索;
Step5,記錄一次迭代找到的最優蜜源,比較是否達到終止條件,如果達到則輸出最優值,否則回到Step2。
將上述過程利用MATLAB編程實現,并在MATLAB R2012平臺上進行計算。
3.2 適應度函數
對并聯機構結構參數進行優化的關鍵是制定適應度函數。按照上文給定的數學模型,給出適應度函數的算法。
算法1,并聯機構在姿態空間的適應度值。
輸入:并聯機構設計參數X=[R,r,φ,θ]。
步驟:
1)初始化。
{給出動平臺姿態定義域范圍[αmin,αmax],[βmin,βmax],[zmin,zmax],桿長限制范圍[Lmin,Lmax],胡克鉸最大轉角,球鉸最大轉角,隨機搜索點數N1,并將計數器N2初始化為0};
2)采用蒙特卡洛方法在動平臺姿態定義域{[αmin,αmax],[βmin,βmax],[zmin,zmax]}內隨機搜索N1個點;
3)For(i=1;i<=N1;i++)do
{
判斷是否符合桿長和最大轉角限制;
如果符合則
{
N2=N2+1;
計算該點的角速度條件數kJω;
}
}
將上述過程也用MATLAB編程,作為人工蜂群算法的適應度函數。
3.3 優化結果
2UPS-PU型并聯機構的設計約束設置見表1。

表1 結構參數范圍
人工蜂群算法初始參數設置如下:D=4,ItMax=100,nPop=20,L=5。
按照上述設置,得到如圖2所示優化迭代過程。
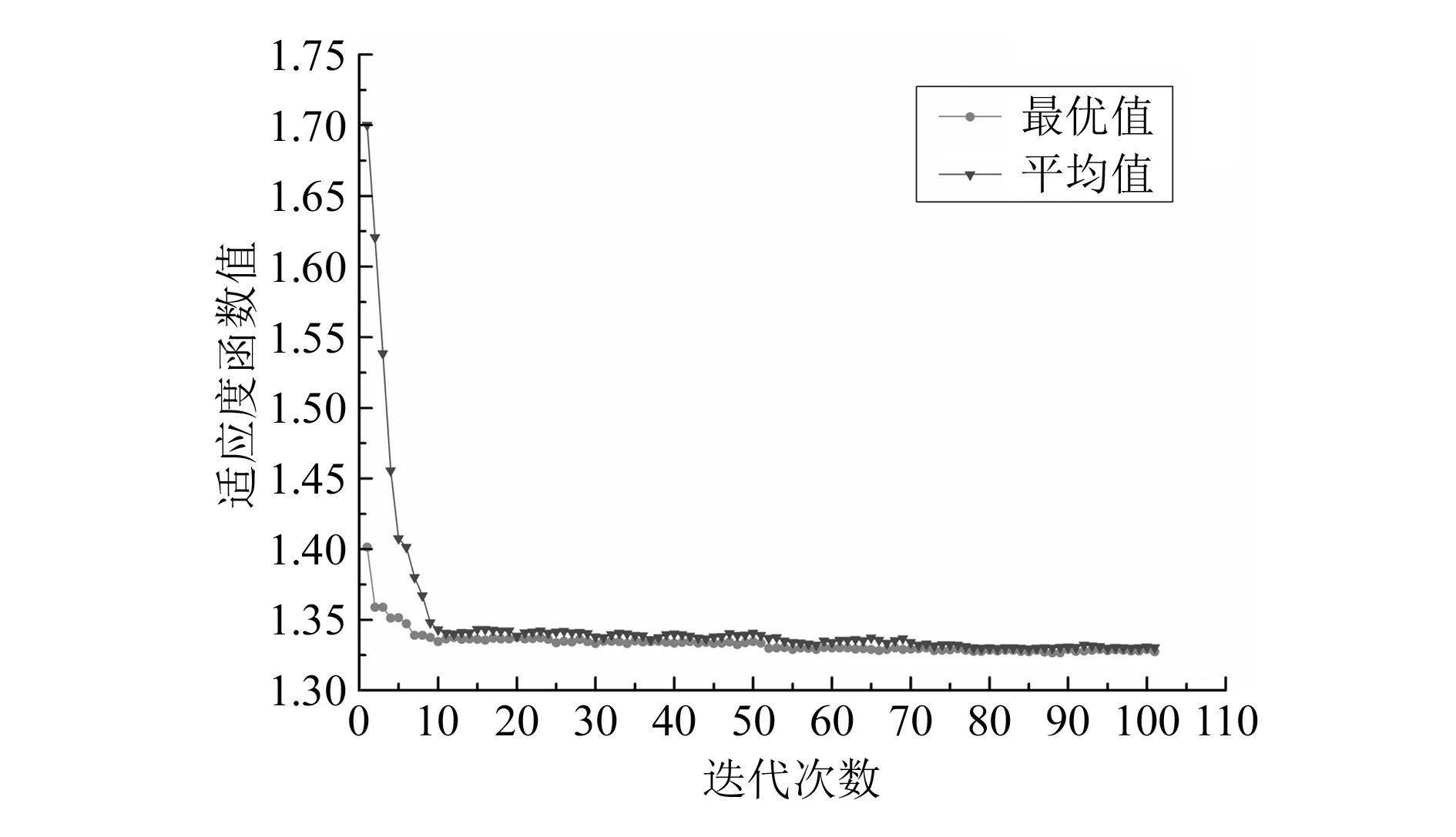
圖2 優化迭代過程
4 優化結果分析


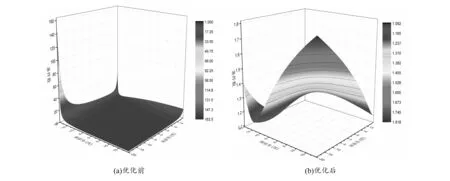
圖3 z=780 mm平面角速度條件數分布對比
圖4 z=850 mm平面角速度條件數分布對比
圖5 z=1 200 mm平面角速度條件數分布對比
5 結論
本文對一種少自由度2UPS-PU并聯機構的結構參數以角速度離散型全姿態空間條件數為指標采用人工蜂群算法進行優化設計,得到了以下結論:
1)優化后2UPS-PU并聯機構在動平臺的全姿態空間內靈巧度顯著改善,避免了運動傳遞過程中的失真現象,為抗眩暈訓練裝置物理樣機的設計和制造提供了理論和技術支持;
2)角速度離散型全姿態空間條件數的評價指標考慮到并聯機構可達工作空間每一點的所有姿態,計算量小,為并聯機構的靈巧度優化提供了有效的評價指標;
3)人工蜂群算法適用于并聯機構的優化設計,全局搜索能力強,收斂速度快。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
