橋式起重機(jī)能耗分析與建模
2020-10-27 02:54:56葛志浩童一飛李向東
機(jī)械設(shè)計(jì)與制造工程 2020年10期
關(guān)鍵詞:變頻器
葛志浩,童一飛,李向東
(1.南京理工大學(xué)機(jī)械工程學(xué)院,江蘇 南京 210094) (2.江蘇省特種設(shè)備安全監(jiān)督檢驗(yàn)研究院,江蘇 南京 210036)
橋式起重機(jī)是國民經(jīng)濟(jì)建設(shè)中不可或缺的特種設(shè)備,廣泛應(yīng)用于工礦企業(yè)、港口碼頭、物流企業(yè)等。隨著環(huán)境問題的日益嚴(yán)峻以及節(jié)能減排的必然趨勢(shì), 國家質(zhì)檢總局提出要對(duì)高耗能特種設(shè)備進(jìn)行能效測(cè)試,加強(qiáng)特種設(shè)備使用環(huán)節(jié)的節(jié)能監(jiān)管。探索橋式起重機(jī)的節(jié)能措施與檢測(cè)評(píng)價(jià)技術(shù)已成為一個(gè)熱門的研究課題[1]。目前,我國已經(jīng)從各方面進(jìn)行起重機(jī)節(jié)能技術(shù)研究[2]。
1 橋式起重機(jī)能量流
橋式起重機(jī)是一種典型的特種設(shè)備,其結(jié)構(gòu)復(fù)雜、耗能環(huán)節(jié)眾多、動(dòng)態(tài)變化大、工作環(huán)境惡劣。橋式起重機(jī)運(yùn)行時(shí),電能通過電動(dòng)機(jī)的電磁耦合轉(zhuǎn)變?yōu)闄C(jī)械能,一部分用以維持起重機(jī)中零部件的運(yùn)動(dòng),一部分通過傳遞、損耗最后轉(zhuǎn)變?yōu)檩d重的動(dòng)能和勢(shì)能。本文將這種能量的運(yùn)動(dòng)稱為橋式起重機(jī)的能量流,由能量的信息論可知,系統(tǒng)能量流的狀態(tài)是機(jī)械運(yùn)行狀態(tài)的綜合反映[3]。
橋式起重機(jī)的能量流可分為工作機(jī)構(gòu)能量流和輔助系統(tǒng)能量流兩部分。工作機(jī)構(gòu)的能量流是橋式起重機(jī)能量流的主體,同時(shí)也是重要的能量損耗組成部分,因此本文主要研究工作機(jī)構(gòu)的能量損耗特性。橋式起重機(jī)運(yùn)行過程中工作機(jī)構(gòu)的能量流示意圖如圖1所示。
由圖1可得:
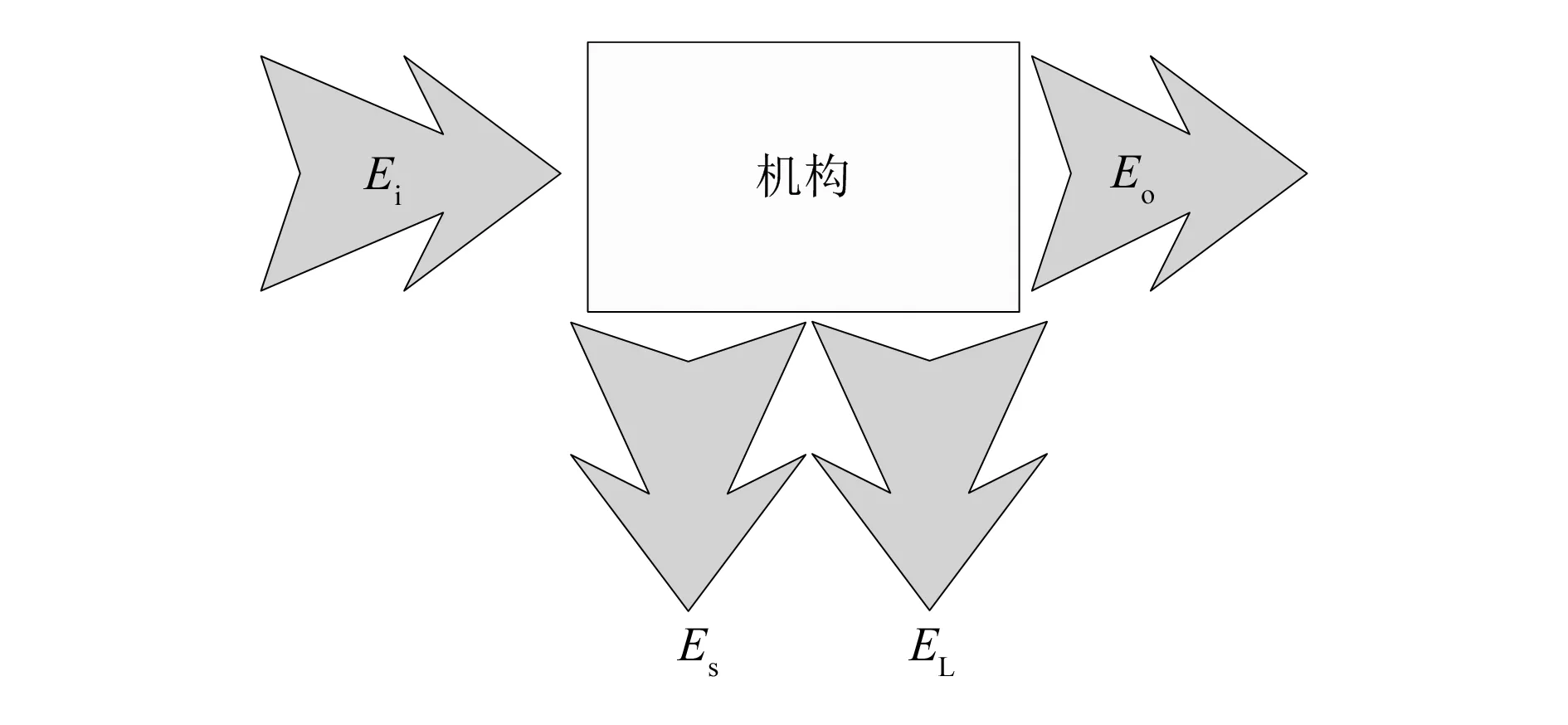
圖1 機(jī)構(gòu)能量流示意圖
Ei=Es+EL+Eo
(1)
式中:Ei為工作機(jī)構(gòu)的總輸入能量;Es為工作機(jī)構(gòu)的儲(chǔ)能,是指電動(dòng)機(jī)磁場(chǎng)儲(chǔ)存能和整個(gè)機(jī)構(gòu)儲(chǔ)存的機(jī)械能(一般是機(jī)械系統(tǒng)的動(dòng)能和),它們?cè)趧?dòng)態(tài)過程中不斷貯存和釋放;EL為工作機(jī)構(gòu)損耗的總能量;Eo為工作機(jī)構(gòu)輸出的能量。
為了突出能量流動(dòng)過程中的瞬態(tài)特性,研究橋式起重機(jī)工作過程中能量消耗的動(dòng)態(tài)過程,對(duì)橋式起重機(jī)工作機(jī)構(gòu)的能量流公式(1)進(jìn)行微分處理,得橋式起重機(jī)的瞬態(tài)能量流公式如下:
Pi=Ps+PL+Po
(2)
(3)
式中:Pi為工作機(jī)構(gòu)輸入的功率;Ps為工作機(jī)構(gòu)儲(chǔ)能的變化率;PL為工作機(jī)構(gòu)總的功率損耗;Po為工作機(jī)構(gòu)的輸出功率;t為時(shí)間。
以上分析了橋式起重機(jī)能量傳輸?shù)膭?dòng)態(tài)過程,并以功率表征能量在傳輸過程中的瞬時(shí)值,不僅簡(jiǎn)化了對(duì)能耗問題的分析,而且更符合實(shí)際。
2 橋式起重機(jī)工作機(jī)構(gòu)能耗分析
變頻器、電動(dòng)機(jī)以及傳動(dòng)系統(tǒng)是工作機(jī)構(gòu)的主要組成部分,也是工作機(jī)構(gòu)能量消耗的重點(diǎn)部分。下文將對(duì)上述3個(gè)能耗單元的能量損耗特性和功率傳輸特性進(jìn)行研究,并結(jié)合能耗單元之間的能量傳輸關(guān)系,建立機(jī)構(gòu)的能耗數(shù)學(xué)模型。變頻器、電動(dòng)機(jī)、傳動(dòng)系統(tǒng)的能量傳輸關(guān)系如圖2所示。

圖2 工作機(jī)構(gòu)能量流
2.1 變頻器能耗分析
橋式起重機(jī)通過變頻器實(shí)現(xiàn)變頻調(diào)速可以提高運(yùn)行的穩(wěn)定性,降低工作能耗,提高工作效率。根據(jù)變頻器的主電路結(jié)構(gòu),可將其分為交-交變頻器和交-直-交變頻器(間接變頻器)。間接變頻是目前變頻器中使用較多的變頻方法,間接變頻器主要包括控制電路和主電路兩個(gè)部分,其中主電路包括整流電路、中間儲(chǔ)能環(huán)節(jié)和逆變電路[4]。變頻器的結(jié)構(gòu)如圖3所示。
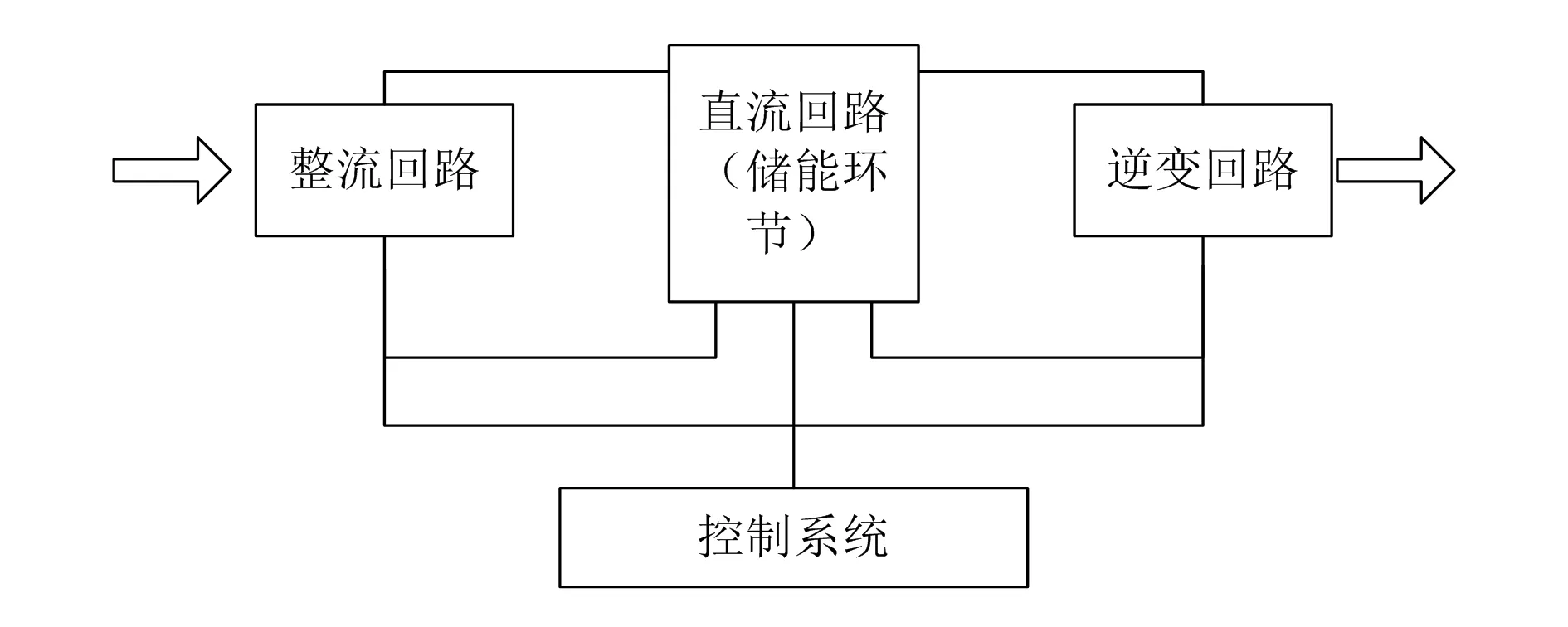
圖3 變頻器結(jié)構(gòu)圖
變頻器的能量損耗形式主要有通態(tài)損耗和開關(guān)損耗。通態(tài)損耗是由變頻器電路中功率器件本身的通態(tài)電阻所引起的,是不可避免的。開關(guān)損耗是由功率器件的開關(guān)所引起的,開、關(guān)頻率的增加會(huì)增加其能量的損耗。
2.2 電動(dòng)機(jī)能耗分析
目前,橋式起重機(jī)大多使用YZR系列三相異步電動(dòng)機(jī)作為其驅(qū)動(dòng)裝置,并通過變頻調(diào)速的方式控制電動(dòng)機(jī)的轉(zhuǎn)速。相對(duì)于傳統(tǒng)的轉(zhuǎn)子串電阻調(diào)速方式,變頻調(diào)速具有較好的調(diào)速平滑性和機(jī)械特性。
從能量轉(zhuǎn)換的角度看,三相異步電動(dòng)機(jī)類似于一個(gè)電磁能量轉(zhuǎn)換器,在橋式起重機(jī)工作過程中,將電能轉(zhuǎn)化成了機(jī)械能[5]。
異步電動(dòng)機(jī)的能量損耗類型見表1,損耗的比例分布如圖4所示。輸入功率Pi經(jīng)過變頻器后的輸出功率P1為電動(dòng)機(jī)的輸入功率。電動(dòng)機(jī)工作電流經(jīng)過定子繞組時(shí),將會(huì)消耗一部分功率,稱其為定子銅耗PCul;由于渦流現(xiàn)象和磁滯現(xiàn)象的存在,將產(chǎn)生的渦流損耗和磁滯損耗合稱為鐵芯損耗PFe。P1在除去消耗在定子繞組的銅耗、鐵芯損耗以及電磁場(chǎng)儲(chǔ)能Em之后,剩下的大部分將通過氣隙傳遞到轉(zhuǎn)子,即:
(4)
式中:Pem為傳遞到轉(zhuǎn)子部分的功率。

表1 電動(dòng)機(jī)能量損耗類型

圖4 電動(dòng)機(jī)能量損失分布
在正常工作時(shí),由于轉(zhuǎn)子轉(zhuǎn)速與磁場(chǎng)轉(zhuǎn)速相差較小,故轉(zhuǎn)子鐵耗很小,可忽略不計(jì)。因此,傳遞到轉(zhuǎn)子的功率除去轉(zhuǎn)子繞組中的銅耗PCu2后,余下的即為電動(dòng)機(jī)總的機(jī)械功率PM。電動(dòng)機(jī)總的機(jī)械功率主要包括軸承和摩擦轉(zhuǎn)矩所引起的機(jī)械損耗Pmec、雜散損耗Pad、轉(zhuǎn)子動(dòng)能Ekm的變化率以及電動(dòng)機(jī)輸出到傳動(dòng)系統(tǒng)的功率P2,因此有:
(5)
綜上分析,根據(jù)能量在電動(dòng)機(jī)中傳輸?shù)臓顟B(tài),可將異步電動(dòng)機(jī)的能量損耗分為電能損耗和機(jī)械能損耗。其中電能損耗PLd包括定子繞組損耗、轉(zhuǎn)子繞組損耗、定子鐵芯損耗[6]以及電磁場(chǎng)儲(chǔ)能變化的損耗,即:
(6)
機(jī)械能損耗包括轉(zhuǎn)子的機(jī)械損耗以及電動(dòng)機(jī)機(jī)械系統(tǒng)的雜散損耗。異步電動(dòng)機(jī)工作時(shí)的能量流程可用式(7)表示:
(7)
2.3 傳動(dòng)系統(tǒng)能耗分析
工作機(jī)構(gòu)傳動(dòng)系統(tǒng)能量傳輸是機(jī)構(gòu)能量傳輸最主要的環(huán)節(jié),包括了從電機(jī)輸出軸到機(jī)構(gòu)能量輸出的部分。傳動(dòng)系統(tǒng)能量傳輸過程中,存在著各種能量損耗,主要有兩個(gè)部分:一部分是與角速度成近似正比的庫侖摩擦功率損耗Pk,另一部分是與角速度的平方近似成正比的黏性摩擦功率損耗Pc。其中庫侖摩擦功率損耗可分為與傳動(dòng)系統(tǒng)輸出功率(載荷功率)有關(guān)的載荷功率損耗Pa以及與載荷無關(guān)的非載荷庫侖摩擦功率損耗Pua。非載荷庫侖摩擦功率損耗與黏性摩擦之和稱之為非載荷功率損耗[7]。如圖5所示。
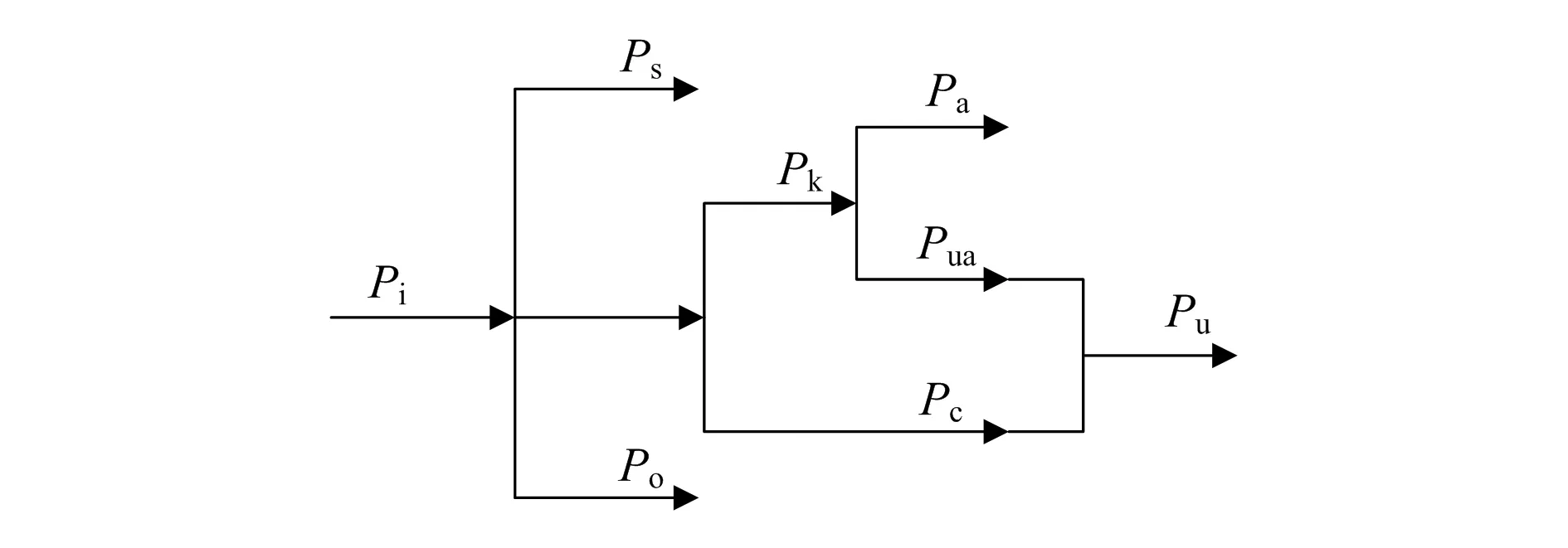
圖5 傳動(dòng)系統(tǒng)能量流功率組成
傳動(dòng)系統(tǒng)的能量損耗與機(jī)構(gòu)中各零件的角速度存在一定的關(guān)系,但是一般情況下各傳動(dòng)部件的運(yùn)行速度是不一致的,因此將傳動(dòng)軸以及角速度相同的零部件所組成的子系統(tǒng)定義為一個(gè)傳動(dòng)環(huán)節(jié),并運(yùn)用公式表示各傳動(dòng)環(huán)節(jié)的能量流動(dòng)。式(8)~式(11)為第i傳動(dòng)環(huán)節(jié)的能量傳輸方程。
Pii=Poi+Pui+Pai+Psi
(8)
(9)
Pai=bi×Poi
(10)
(11)
式中:Pii為第i傳動(dòng)環(huán)節(jié)的輸入功率;Pui為第i傳動(dòng)環(huán)節(jié)的非載荷功率損耗;Pai為第i傳動(dòng)環(huán)節(jié)的載荷功率損耗;Poi為第i傳動(dòng)環(huán)節(jié)的輸出功率,即為第(i+1)傳動(dòng)環(huán)節(jié)的輸入功率;Psi為第i傳動(dòng)環(huán)節(jié)各部件單位時(shí)間儲(chǔ)存能的變化;Mi為第i傳動(dòng)環(huán)節(jié)的非載荷庫侖摩擦阻力矩;Bi為第i傳動(dòng)環(huán)節(jié)的阻尼系數(shù);bi為第i傳動(dòng)環(huán)節(jié)的載荷損耗系數(shù);Ji為第i傳動(dòng)環(huán)節(jié)的等效轉(zhuǎn)動(dòng)慣量;Eki為第i傳動(dòng)環(huán)節(jié)的動(dòng)能和;ωi為第i傳動(dòng)環(huán)節(jié)的角速度。將式(9)~(11)代入式(8)得:
(12)
式(12)中,各傳動(dòng)環(huán)節(jié)的角速度均可通過電動(dòng)機(jī)主軸轉(zhuǎn)動(dòng)的角速度與傳動(dòng)比表示,即ωi=jiωm,其中ji為第i傳動(dòng)環(huán)節(jié)到電動(dòng)機(jī)主軸的傳動(dòng)比,ωm為電動(dòng)機(jī)主軸的角速度,故有:
(13)
對(duì)上述方程進(jìn)行處理,結(jié)合電動(dòng)機(jī)輸出功率與傳動(dòng)系統(tǒng)輸入功率之間的關(guān)系,可得橋式起重機(jī)工作機(jī)構(gòu)傳動(dòng)系統(tǒng)的能耗數(shù)學(xué)模型為:
(14)
(15)
(16)
(17)
(18)
式中:M1為第1個(gè)傳動(dòng)環(huán)節(jié)非載荷庫侖摩擦阻力矩;J1為第1個(gè)傳動(dòng)環(huán)節(jié)等效轉(zhuǎn)動(dòng)慣量;B1為第1個(gè)傳動(dòng)環(huán)節(jié)的阻尼系數(shù);Mk為第k個(gè)傳動(dòng)環(huán)節(jié)非載荷庫侖摩擦阻力矩;j1第1個(gè)傳動(dòng)環(huán)節(jié)到電動(dòng)機(jī)主軸的傳動(dòng)比;Jk為第k個(gè)傳動(dòng)環(huán)節(jié)等效轉(zhuǎn)動(dòng)慣量;jk第k個(gè)傳動(dòng)環(huán)節(jié)到電動(dòng)機(jī)主軸的傳動(dòng)比。
橋式起重機(jī)工作機(jī)構(gòu)傳動(dòng)系統(tǒng)能量流程如圖6所示。其中Pmi為第i傳動(dòng)環(huán)節(jié)的機(jī)械損耗。

圖6 傳動(dòng)系統(tǒng)動(dòng)態(tài)能量流圖
根據(jù)工作性質(zhì)的不同,橋式起重機(jī)的工作機(jī)構(gòu)可分為起升機(jī)構(gòu)和運(yùn)行機(jī)構(gòu),一個(gè)完整的工作過程是起升機(jī)構(gòu)和運(yùn)行機(jī)構(gòu)的組合運(yùn)動(dòng)[8]。
橋式起重機(jī)的起升機(jī)構(gòu)主要包括聯(lián)軸器傳動(dòng)部分、減速器傳動(dòng)部分、鋼絲繩卷繞系統(tǒng)以及滑輪系統(tǒng)。其中滑輪系統(tǒng)為柔性系統(tǒng),其傳動(dòng)效率記為ηh。結(jié)合式(14),可得起升機(jī)構(gòu)傳動(dòng)系統(tǒng)的能耗數(shù)學(xué)模型:
(19)
式中:P12為起升機(jī)構(gòu)電動(dòng)機(jī)輸出的功率;P1o為起升機(jī)構(gòu)輸出的功率;α1m為起升機(jī)構(gòu)傳動(dòng)系統(tǒng)的載荷系數(shù);λ1m為起升機(jī)構(gòu)傳動(dòng)系統(tǒng)等效到電動(dòng)機(jī)主軸上的非載荷庫侖摩擦力矩;β1m為起升機(jī)構(gòu)傳動(dòng)系統(tǒng)等效到電動(dòng)機(jī)主軸上的阻尼系數(shù);γ1m為起升機(jī)構(gòu)傳動(dòng)系統(tǒng)等效到電動(dòng)機(jī)主軸上的轉(zhuǎn)動(dòng)慣量;ω1m為起升機(jī)構(gòu)電動(dòng)機(jī)主軸的角速度。
橋式起重機(jī)的運(yùn)行機(jī)構(gòu)主要實(shí)現(xiàn)載重的水平移動(dòng),調(diào)整工作位置[9]。其傳動(dòng)系統(tǒng)由聯(lián)軸器傳動(dòng)部分、減速機(jī)傳動(dòng)部分以及軸承和車輪傳動(dòng)部分組成。根據(jù)上述分析的機(jī)構(gòu)傳動(dòng)系統(tǒng)的能耗數(shù)學(xué)模型,可得運(yùn)行機(jī)構(gòu)傳動(dòng)系統(tǒng)能耗數(shù)學(xué)模型如下:
(20)
式中:P22為運(yùn)行機(jī)構(gòu)電動(dòng)機(jī)的輸出功率;P2o為起升機(jī)構(gòu)輸出的功率;α2m為運(yùn)行機(jī)構(gòu)傳動(dòng)系統(tǒng)的載荷系數(shù);β2m為運(yùn)行機(jī)構(gòu)傳動(dòng)系統(tǒng)等效到電動(dòng)機(jī)主軸上的非載荷庫侖摩擦力矩;γ2m為運(yùn)行機(jī)構(gòu)傳動(dòng)系統(tǒng)等效到電動(dòng)機(jī)主軸上的阻尼系數(shù);λ2m為運(yùn)行機(jī)構(gòu)傳動(dòng)系統(tǒng)等效到電動(dòng)機(jī)主軸上的轉(zhuǎn)動(dòng)慣量;ω2m為運(yùn)行機(jī)構(gòu)電動(dòng)機(jī)主軸的角速度。
上文分析了變頻器、電動(dòng)機(jī)以及機(jī)械傳動(dòng)系統(tǒng)的能耗特性和功率傳輸規(guī)律,并建立了各能耗單元的功率方程,下文將依據(jù)各能耗單元之間能量傳輸?shù)年P(guān)系構(gòu)建整個(gè)工作機(jī)構(gòu)的能耗數(shù)學(xué)模型。
3 工作機(jī)構(gòu)能耗數(shù)學(xué)模型的建立
根據(jù)能量在工作機(jī)構(gòu)中的傳輸形式,可將工作機(jī)構(gòu)的能量傳輸分為兩個(gè)部分:一個(gè)為電能傳輸部分,包括變頻器以及電動(dòng)機(jī)的定子部分;另一個(gè)為機(jī)械能傳輸部分,由電動(dòng)機(jī)的轉(zhuǎn)子部分和傳動(dòng)系統(tǒng)構(gòu)成。電能傳輸部分的能量損耗包括變頻器的損耗PB,以及異步電動(dòng)機(jī)的電能損耗PLd。機(jī)械能傳輸部分的損耗包括電動(dòng)機(jī)的機(jī)械損耗和雜散損耗以及傳動(dòng)系統(tǒng)的能量損耗。考慮到異步電動(dòng)機(jī)是整個(gè)工作機(jī)構(gòu)能量流程的中間環(huán)節(jié),并且也是將電能轉(zhuǎn)化為機(jī)械能的主要單元,因此以電動(dòng)機(jī)作為中間環(huán)節(jié)建立工作機(jī)構(gòu)的能耗數(shù)學(xué)模型。工作機(jī)構(gòu)的能量流方程如下:
Pi=PB+PLd+PM
(21)
(22)
電動(dòng)機(jī)的雜散損耗Pad會(huì)在電動(dòng)機(jī)上產(chǎn)生制動(dòng)性質(zhì)的阻力矩,因此本文將電動(dòng)機(jī)的雜散損耗分為與電動(dòng)機(jī)輸出功率P2相關(guān)的能量損耗Pad0和與P2無關(guān)的能量損耗Pad1兩部分,將Pad1并入轉(zhuǎn)子的機(jī)械功率損耗Pmec中,計(jì)為Pm,并按照分析傳動(dòng)系統(tǒng)機(jī)械損耗的方法處理,有:
(23)
(24)
式中:bm為電動(dòng)機(jī)載荷系數(shù);Mm為電動(dòng)機(jī)非載荷庫侖摩擦力矩;Bm為電動(dòng)機(jī)的阻尼系數(shù);Jm為電動(dòng)機(jī)主軸上的轉(zhuǎn)動(dòng)慣量。異步電動(dòng)機(jī)機(jī)械傳動(dòng)環(huán)節(jié)功率分布如圖7所示。
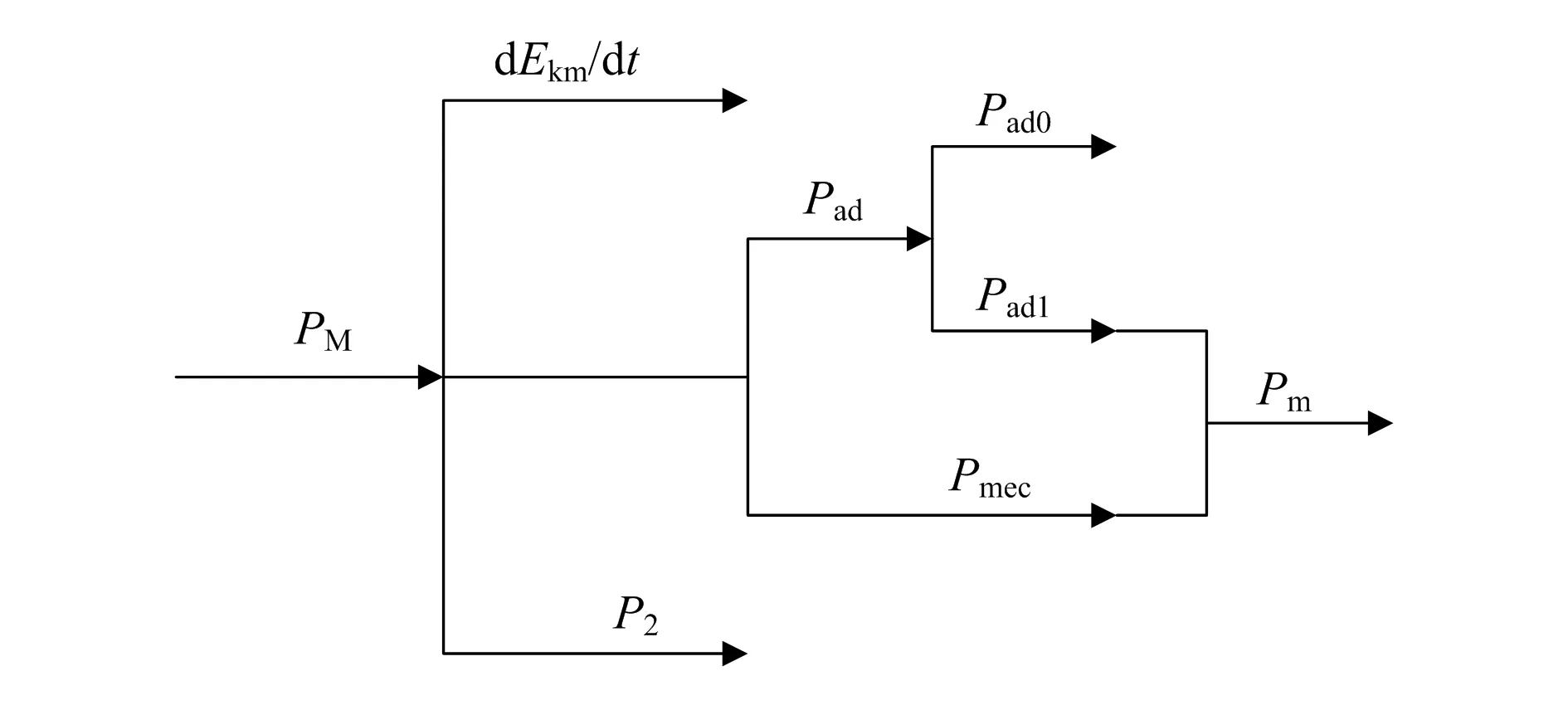
圖7 電動(dòng)機(jī)機(jī)械傳動(dòng)環(huán)節(jié)功率分布
將式(23)代入式(20),可得工作機(jī)構(gòu)的能量流方程如式(25)所示。
(25)
將起升機(jī)構(gòu)與運(yùn)行機(jī)構(gòu)傳動(dòng)系統(tǒng)的能耗模型,代入到工作機(jī)構(gòu)的能量流方程中,可得工作機(jī)構(gòu)的能耗數(shù)學(xué)模型。
起升機(jī)構(gòu)的能耗模型:
(26)
α1t=(1+b1m)α1m
(27)
β1t=M1m+(1+b1m)β1m
(28)
γ1t=B1m+(1+b1m)γ1m
(29)
λ1t=J1m+(1+b1m)λ1m
(30)
式中:P1i為起升機(jī)構(gòu)輸入功率;P1B為起升機(jī)構(gòu)變頻器損耗功率;P1Ld為起升機(jī)構(gòu)電動(dòng)機(jī)電能損耗。
運(yùn)行機(jī)構(gòu)的能耗數(shù)學(xué)模型:
(31)
α2t=(1+b2m)α2m
(32)
β2t=M2m+(1+b2m)β2m
(33)
γ2t=B2m+(1+b2m)γ2m
(34)
λ2t=J2m+(1+b2m)λ2m
(35)
式中:P2i為運(yùn)行機(jī)構(gòu)輸入功率;P2B為運(yùn)行機(jī)構(gòu)變頻器損耗功率;P2Ld為運(yùn)行機(jī)構(gòu)電動(dòng)機(jī)的電能損耗。
4 特性分析
由上文的分析可知,橋式起重機(jī)運(yùn)行過程中存在著各種形式的能量損耗,依據(jù)能量傳輸以及損耗的形式,可將其分為電能損耗和機(jī)械能損耗。變頻器存在較大的能量損耗,其主要由功率器件的高速開關(guān)所消耗的能量以及橋式起重機(jī)減速、停車過程中消耗的大量電能組成,這些電能最終轉(zhuǎn)變成了熱能傳遞到周圍的環(huán)境中。傳動(dòng)機(jī)構(gòu)的能量損耗主要有非載荷能量損耗以及載荷能量損耗,主要的損耗包括攪油損耗、軸承損耗以及嚙合損耗。其中,攪油損耗主要是齒輪周面、側(cè)面的潤滑油附著損耗,以及兩齒面間的渦旋損耗;軸承損耗主要是摩擦損耗;嚙合損耗主要為齒輪嚙合過程中的滑動(dòng)摩擦損耗[10]。從工作機(jī)構(gòu)的能耗數(shù)學(xué)模型不難看出,機(jī)構(gòu)的能量損耗以及動(dòng)能的變化,都與電機(jī)主軸的轉(zhuǎn)速相關(guān)。
橋式起重機(jī)的能量損耗不僅僅會(huì)降低能量的利用率,在實(shí)際的生產(chǎn)過程中還會(huì)影響起重機(jī)的使用壽命以及工作效率等,是一種有害損耗。圖8分析了橋式起重機(jī)能量損耗所造成的影響。橋式起重機(jī)運(yùn)行時(shí)各零部件的摩擦?xí)?dǎo)致機(jī)構(gòu)零部件的磨損,從而減少橋式起重機(jī)的壽命和降低其可靠性。噪聲以及振動(dòng)一直存在于橋式起重機(jī)的整個(gè)工作周期中,也是能量損耗的一種形式;橋式起重機(jī)能量損耗大部分會(huì)轉(zhuǎn)化成熱能,在其起動(dòng)和制動(dòng)的過程中尤為明顯,并且在起、制動(dòng)過程中存在較大的動(dòng)載荷會(huì)影響整體結(jié)構(gòu)的剛度,產(chǎn)生一定程度的形變,從而加劇運(yùn)動(dòng)副的磨損等。
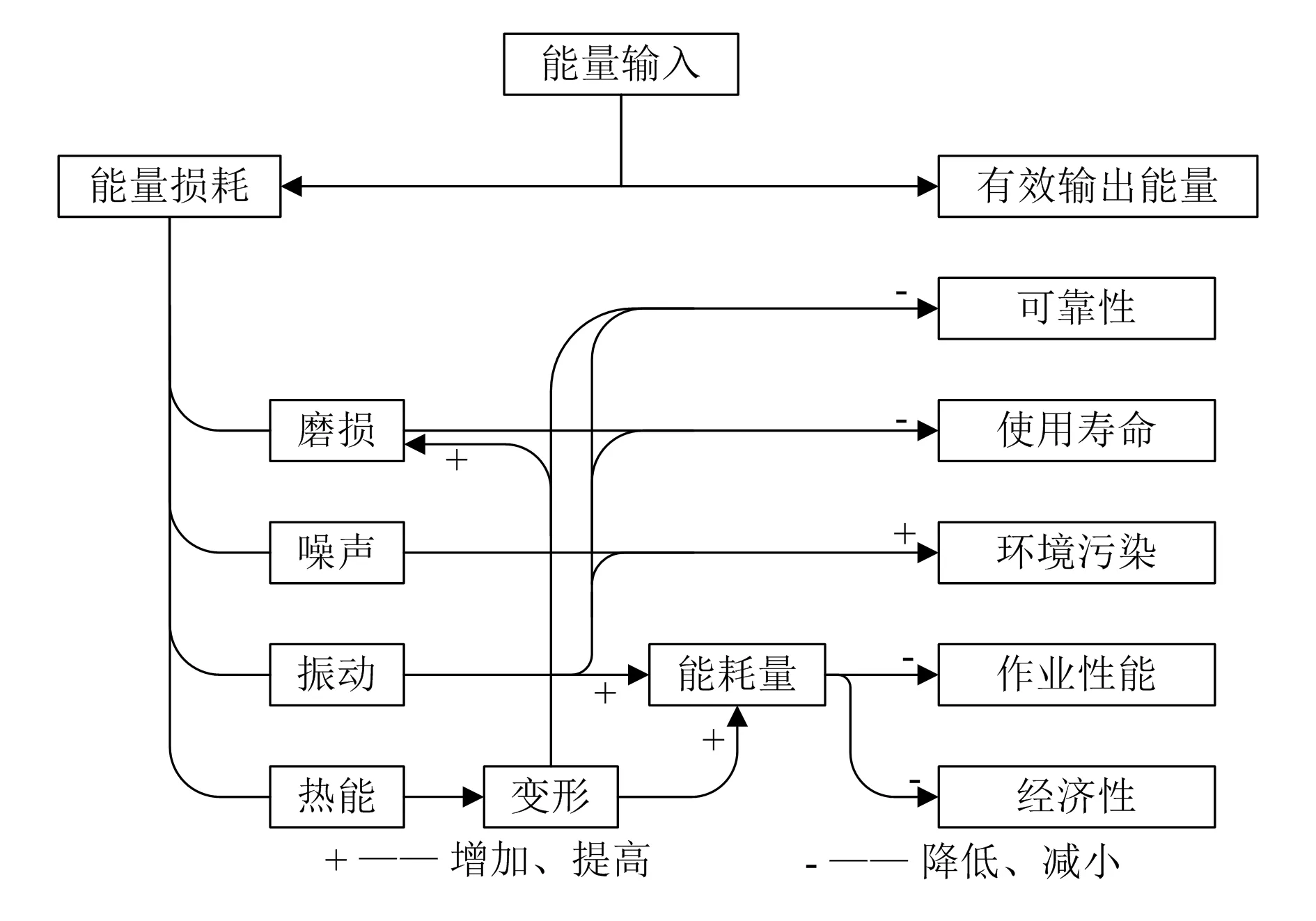
圖8 橋式起重機(jī)能量損耗及影響
橋式起重機(jī)工作過程中存在的磨損、振動(dòng)、變形、噪聲等都與橋式起重機(jī)的能量損耗存在著密切聯(lián)系或有一定的依存關(guān)系,橋式起重機(jī)的能量消耗是其運(yùn)行狀態(tài)和多種工作性能的綜合反映。因此,進(jìn)行節(jié)能研究,采取適當(dāng)?shù)拇胧┙档蜆蚴狡鹬貦C(jī)的能量損耗,有利于改善橋式起重機(jī)的性能,提高整體的生產(chǎn)作業(yè)水平,而成熟的能耗評(píng)價(jià)技術(shù)是實(shí)現(xiàn)節(jié)能研究的必要前提。
5 結(jié)束語
本文從橋式起重機(jī)工作機(jī)構(gòu)能量流出發(fā),對(duì)工作機(jī)構(gòu)內(nèi)部能耗單元的能耗特性和功率傳輸特性進(jìn)行了研究。在此基礎(chǔ)之上,給出了可以反映工作機(jī)構(gòu)能耗狀態(tài)的數(shù)學(xué)模型,該模型不僅將各耗能單元聯(lián)系了起來,而且清楚地表達(dá)了主要能量損耗的特征。最后,對(duì)橋式起重機(jī)的能量損耗以及能量損耗對(duì)橋式起重機(jī)生產(chǎn)作業(yè)的影響進(jìn)行了分析,提出了研究能耗評(píng)價(jià)的必要性。本文的研究為后續(xù)橋式起重機(jī)能耗評(píng)價(jià)指標(biāo)體系的建立和評(píng)價(jià)方法的研究打下了基礎(chǔ)。
猜你喜歡
消費(fèi)電子(2022年6期)2022-08-25 09:47:16
鍛壓裝備與制造技術(shù)(2021年3期)2021-08-13 08:39:56
防爆電機(jī)(2020年3期)2020-11-06 09:07:42
活力(2019年22期)2019-03-16 12:47:40
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:50
四川冶金(2017年6期)2017-09-21 00:52:30
電子制作(2017年7期)2017-06-05 09:36:13
電子測(cè)試(2017年23期)2017-04-04 05:07:32
自動(dòng)化博覽(2014年12期)2014-02-28 22:34:39
自動(dòng)化博覽(2014年10期)2014-02-28 22:33:52
