略談國內外地下裝載機自動化現狀與發展趨勢
2020-10-26 03:05:48張方澤趙金元
有色設備 2020年4期
張方澤, 趙金元
(1.廣西華錫集團股份有限公司, 廣西 大廠 547207; 2.中鋼集團衡陽機械有限公司, 湖南 衡陽 421002)
0 引言
隨著采礦行業的快速發展,我國非煤地下礦山無軌采礦設備地下裝載機每年以約15%的速度增加,目前國內地下礦山擁有的各種地下裝載機幾千臺基本都是人工操作。隨著各級政府對職業健康與安全的重視,地下采礦已由原始的人工挖掘,經過機械化,發展衍變到了自動化、智能化。正是這些發展,使得這個在過去屬于勞動密集型、高風險型的行業,變得輕松而且安全,地下裝載機的自動化、智能化發展將使 “無人礦山”成為現實。地下裝載機自動化的發展至今已經第四代,下文將從發展過程和今后發展趨勢等方面對其進行介紹。
1 地下裝載機自動化發展過程
隨著社會的進步和科技的發展,人們對健康、對環境越來越重視,安全問題成了機械設備的重中之重。為了保護操作人員人身和設備安全、降低采礦成本、提高生產效率,采礦設備由機械化向自動化階段過渡,國外一些礦山已經實現了或部分實現了自動化的目標。它的發展經過了人工控制、遙控控制、遠距離控制、半自主控制、自主控制,如表1所示[2-4]。
1.1 人工控制
目前地下采礦設備基本上采用人工控制(如圖1所示),一機一人,其操作簡單、成本低。由于這些設備是人工操作,工人勞動強度大、效率低,特別是巖石的崩落、車輛的振動、灰塵與柴油機排放的有害氣體等惡劣的作業條件對司機的安全和職業健康造成直接威脅和危害。為了解決這個問題,人們開發了地下裝載機遙控技術。

圖1 人工控制地下裝載機
1.2 遙控控制
1.2.1 視距控制(Line of sight control)
視距控制(如圖2所示)是操作員位于作業區內的危險范圍外,直接觀察和控制設備。視距范圍一般在5 m至250 m范圍內。操作員可以看到車輛,并可以通過無線電裝置(RRC)遙控車輛。視距遙控用得比較廣泛。
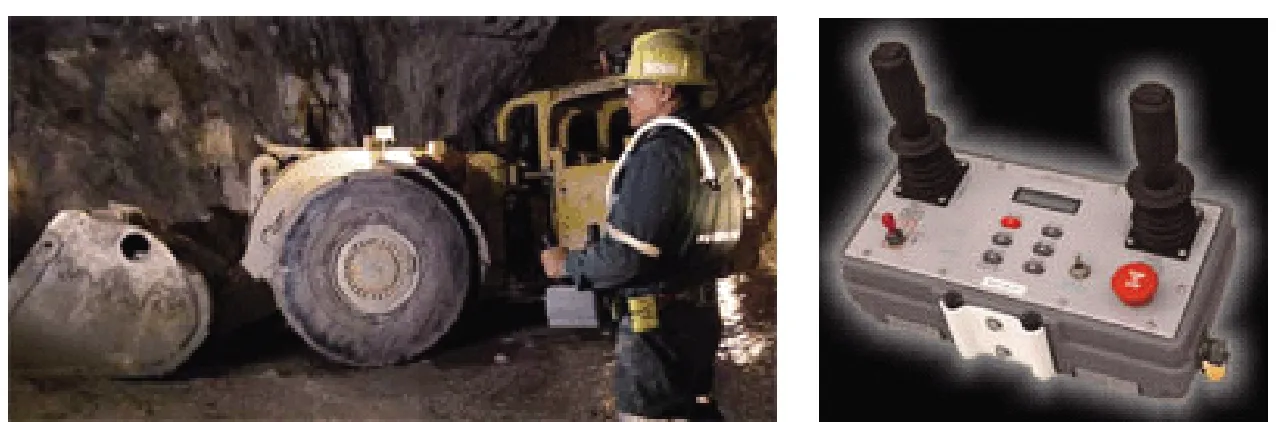
圖2 視距控制和無線電遙控裝置
自從20世紀70年代開發出視距遙控地下裝載機以來,視距遙控地下裝載機得到迅速發展和應用。
1983年,長沙礦山研究院先后研制成功YK- 1、YK- 2、YKCY- 1.5和WJD- 1.5遙控地下裝載機。20世紀80年代末,安慶銅礦引進美國Wagner公司ST- 5C型視距遙控地下裝載機。特別是近幾年,中鋼集團衡陽機械有限公司生產的地下裝載機基本上都可以配置各種遙控系統,目前在WJ- 0.4、WJ- 1.5、WJD- 2、WJD- 3機型上采用視距遙控技術,在WJ- 1.5、WJD- 2、WJ- 4機型上采用視頻遙控技術,在這方面做了大量工作。總的說來,視距遙控地下裝載機的自動化技術還在不斷完善、不斷發展,新的遙控地下裝載機也在不斷出現,應用范圍也在不斷
擴大,國內遙控技術同國外發達國家比還有很大差距,仍需努力,積極趕上。
1.2.2 視頻遙控(Remote control with Video)
當車輛運行距離更遠或車輛拐彎時,視距遙控就顯得無能為力,需采用視頻遙控。視頻遙控類似于視距遙控系統(如圖3所示),只不過增加了一個視頻監視器(如圖4所示),它適用于500 m范圍內。

圖3 視頻遙控

圖4 視頻遙控器
1.3 遠程遙控操作(Tele-remote operation)
遠程遙控操作是指駕駛員在地面或地下的一個中央控制站遠程控制地下裝載機(如圖5、圖6所示),距離在2 000 m范圍內,遠程遙控操作(Tele-remote operation)是向自動化車輛又邁進了一步。
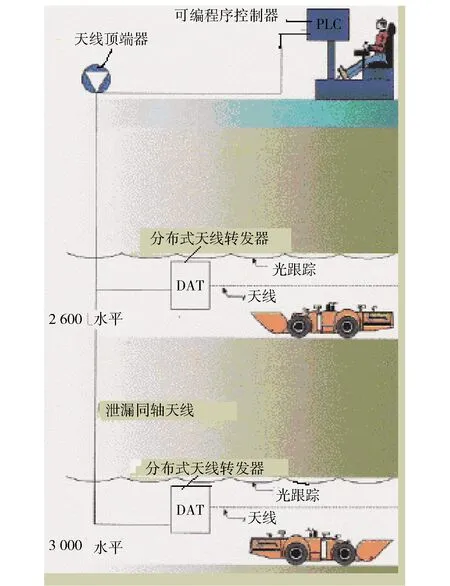
圖5 地面遠程遙控地下裝載機示意圖

圖6 地面遠程遙控地下裝載機
1.4 半自主(semi-autonomous)與自主(Autonomous)控制
隨著計算機技術、通訊技術和人工智能技術的快速發展,近幾年發展起來的最新技術半自主和自主地下裝載機,是今后若干年地下裝載機技術發展方向。其與遠程遙控控制最大區別是一個司機可同時控制幾臺機器,而遠程遙控控制是一個司機只能控制一臺機器。半自主與自主控制在整個操作過程中是半自動或全自動的,而遠程遙控控制在整個操作過程中都是人工控制。半自主與自主控制車輛,其運行速度也遠比遠程遙控控制快,生產效率也更高,安全性也更好。半自主與自主控制之間不同之處在于半自主控制在整個作業循環中,大部分作業時間是自動的,小部分作業時間靠人來完成。在生產循環中,鏟裝作業是在操作人員遙控操作下進行,運輸、卸礦和返回是在機載計算機的自動控制下完成。自主控制在裝載、運輸、卸礦、返回整個作業循環都是自動的,操縱員只是起監視作用,是當前采礦設備中最先進最復雜的技術。
2 發展趨勢
目前地下裝載機自動化已發展到第四代,地下裝載機下一步的發展趨勢就是數字化與智能化。數字化與智能化礦山(無人采礦)總體來講,就是礦山地面和井下的、人類從事礦產資源開采的各種動態、靜態的信息都能夠數字化,而且用計算機網絡來管理,同時利用空間技術、自動定位和導航技術實現遠程遙控和自動化采礦。礦山數字化是礦山智能化的基礎,礦山智能化主要指的是智能采礦,即采礦決策過程高度可靠、準確。智能化采礦設備(機器人)與現代化采礦調度系統的集成,就是無人采礦。我國大約再過25~30年,或許更短時間就會實現整個礦山遠程遙控和自動化采礦。能夠滿足這些要求的是車輛導航系統[5]。
導航是確定一臺車輛的位置、走向和路線,隨后引導車輛以合乎邏輯的方式運動到使設備能夠履行其特定任務的一門科學。地下裝載機導航主要用于引導自動化地下裝載機從采場或礦堆沿著規定路線運輸礦石到卸礦點,卸完料之后又沿原路自動返回原出發地。由此可見導航技術在地下裝載機自動化中起著很關鍵作用,可以說地下裝載機自動化的發展是隨著導航技術的發展而發展的。
3 結束語
地下裝載機發展經過人工控制、遙控控制、遠距離控制到第四代的半自主控制、自主控制。自主或半自主控制的自動化雖有許多優點[1],但也是一門十分復雜的技術,只是局部實現自動化,采礦全過程實現自動化的礦山仍不多,而且集中在幾個大型礦山,地下裝載機自主或半自主控制的自動化需要大量投資,技術要求高,需要一定量的高素質專門技術人才,這是一般礦山難以辦到的,因此要推廣普及更困難。但是隨著經濟的發展和科技的進步,人們對地下裝載機自動化需求也愈來愈迫切,采礦自動化將成為未來發展的趨勢。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
中國核電(2021年3期)2021-08-13 08:56:36
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
印刷工業(2020年4期)2020-10-27 02:45:52
華人時刊(2017年21期)2018-01-31 02:24:01
中國交通信息化(2017年4期)2017-06-06 07:21:52
北方交通(2016年12期)2017-01-15 13:52:53