小型混動游艇雙向全橋型DC-DC變換器MOSFET開路故障診斷方法
2020-10-23 09:24:26溫家晗徐合力
中國修船 2020年5期
溫家晗,高 嵐,徐合力
(武漢理工大學 能源與動力工程學院,湖北 武漢 430063)
雙向DC-DC變換器是混合動力船舶重要的能量轉(zhuǎn)換裝置[1],其全橋型拓撲效率高、控制靈活,但金屬氧化物半導體場效應晶體管(MOSFET)因工作環(huán)境惡劣而故障頻率較高[2]。目前DC-DC變換器故障診斷研究已有成果[3],針對簡單拓撲型變換器可精確識別故障類型[4],但針對雙向全橋型尚無法實現(xiàn)精確識別[5]。
1 小型混動游艇電力系統(tǒng)
小型混動游艇的電力系統(tǒng)主要包含燃料電池、蓄電池、雙向DC-DC變換器、負載。其工況為:燃料電池供應負載耗能,蓄電池回收剩余能量,雙向DC-DC變換器為充電模式;僅蓄電池供應負載耗能,雙向DC-DC變換器為放電模式。
2 變換器結(jié)構(gòu)和故障分析
2.1 雙向全橋型DC-DC變換器結(jié)構(gòu)
雙向全橋型DC-DC變換器(以下簡稱為變換器)的結(jié)構(gòu)見圖1。Ui為船舶電網(wǎng)電壓,Uo為蓄電池電壓,能量由Ui到Uo為充電,反之為放電。S1~S8為MOSFET開關(guān)管,C1、C2為濾波電容,L為儲能電感,W1、W2為變壓器原邊、副邊。a~h點為電壓節(jié)點。
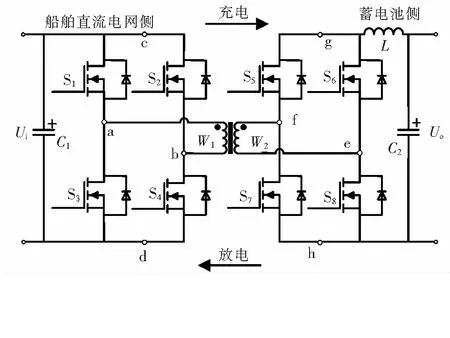
圖1 雙向全橋型DC-DC變換器結(jié)構(gòu)圖
2.2 MOSFET故障類型
3個MOSFET同時故障的情況較少,本文重點研究MOSFET單管、雙管開路共計20種故障,MOSFET故障元件及類型如表1所示。

表1 MOSFET故障元件及類型
2.3 MOSFET故障分析
以變換器充電模式為例,分析MOSFET開路故障特點。以Uab、Uac、Ubd為故障參數(shù),分析t1~t2間電壓波形,t1=0.801 05 s,t2=0.801 12 s。圖2為變換器正常電壓波形,圖3~圖6為單管故障電壓波形,圖7~圖12為雙管故障電壓波形。
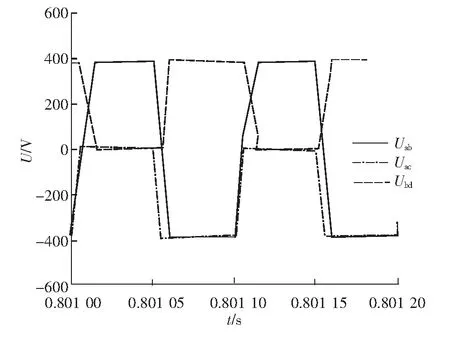
圖2 正常電壓波形圖
1)單管開路故障。在t1~t2間,對比圖3、圖4和圖5、圖6可知,Uab可區(qū)分S1、S2開路和S3、S4開路;由圖3、圖6可知,S1開路和S4開路的Uab基本相同,但兩故障間Uac、Ubd的區(qū)別較大:S1管Uac連續(xù)且均值大于S4管Uac,S4管Ubd連續(xù)且均值大于S1管Ubd。同理分析S2開路和S3開路,兩故障Uab趨于相同,但對比圖4、圖5可知,兩故障間Uac、Ubd的區(qū)別較大,S2管Uac呈正常態(tài)而S3管Uac呈尖峰態(tài),而Ubd狀態(tài)恰好相反。因此,以Uab、Uac、Ubd作為故障參數(shù)可有效區(qū)分4種單管開路故障。
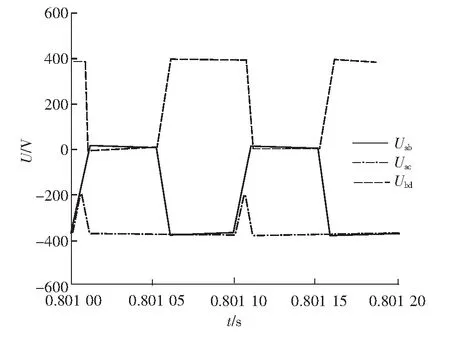
圖3 S1開路電壓波形圖
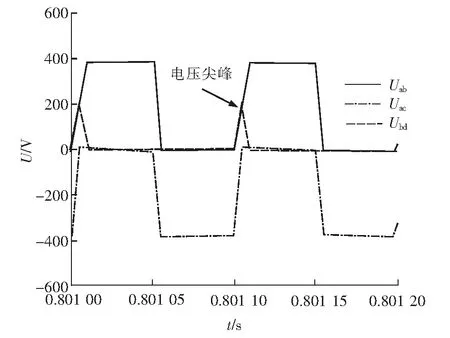
圖4 S2開路電壓波形圖
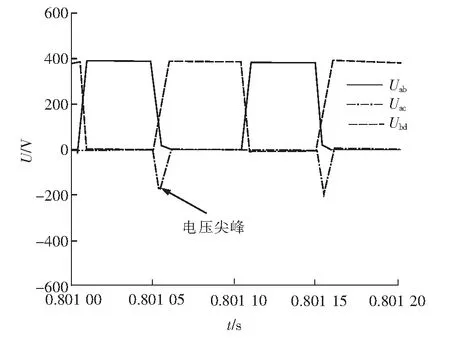
圖5 S3開路電壓波形圖
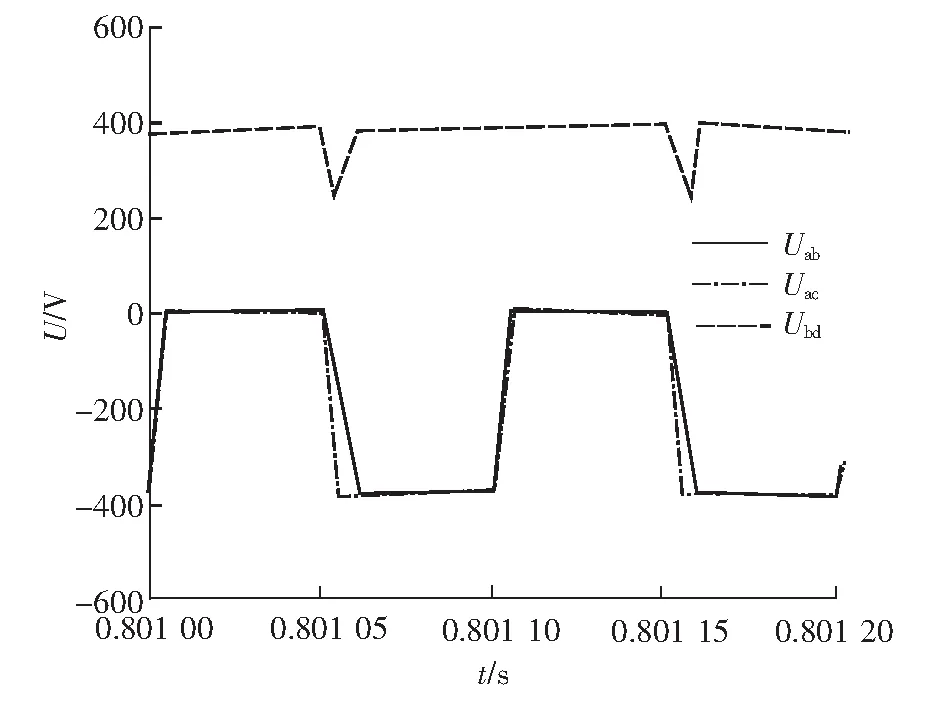
圖6 S4開路電壓波形圖
2)雙管開路故障。由圖7~圖12可知,在t1~t2間Uab僅能區(qū)分S1、S4開路和S2、S3開路。由于在移相控制中,S2管和S3管的導通時間存在重疊,導致S1、S2開路和S1、S3開路Uab趨于一致,但Uac、Ubd區(qū)別較大,如圖7、圖8所示。同理,S2、S4開路和S3、S4開路Uab相似,但Uac、Ubd區(qū)別明顯,如圖11、圖12所示。因此,以Uab、Uac、Ubd作為故障參數(shù)可有效區(qū)分6種雙管開路故障。
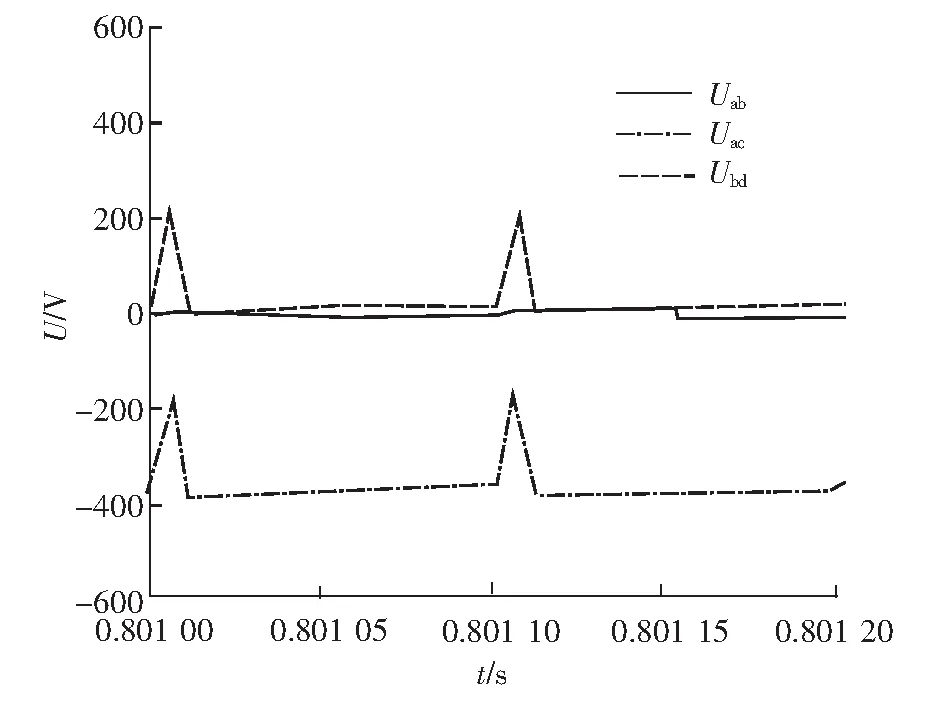
圖7 S1、S2開路電壓波形圖
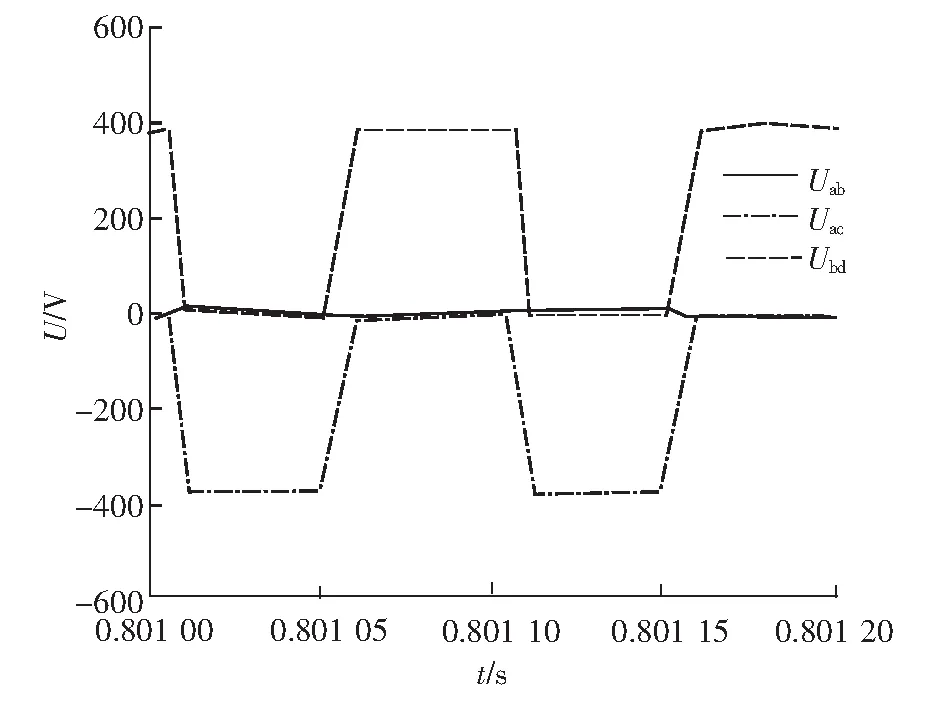
圖8 S1、S3開路電壓波形圖
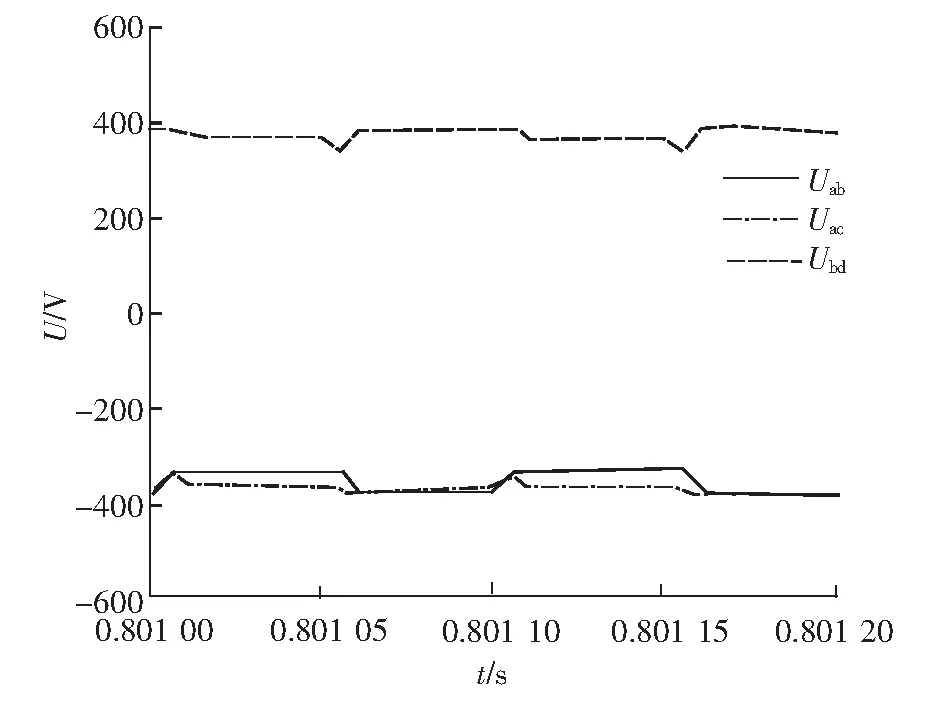
圖9 S1、S4開路電壓波形圖
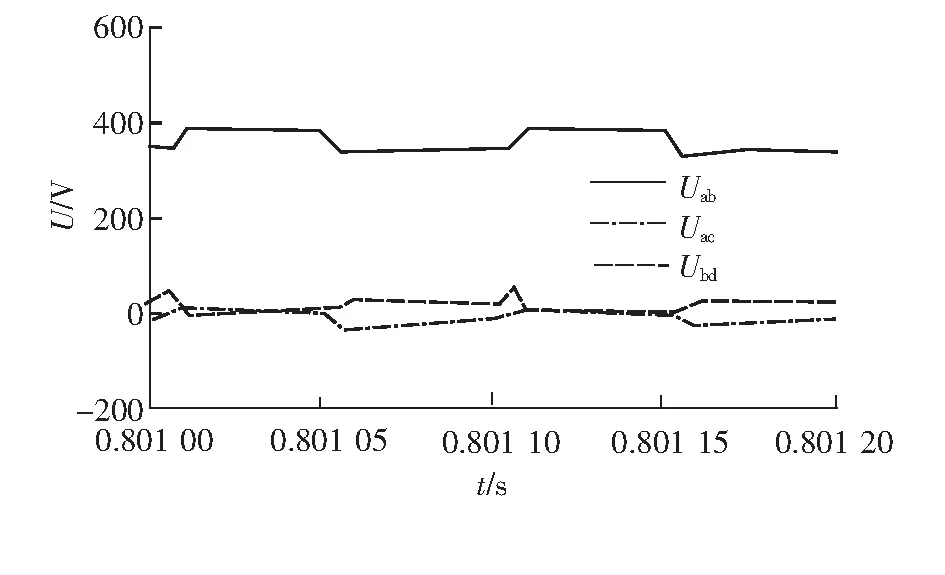
圖10 S2、S3開路電壓波形圖
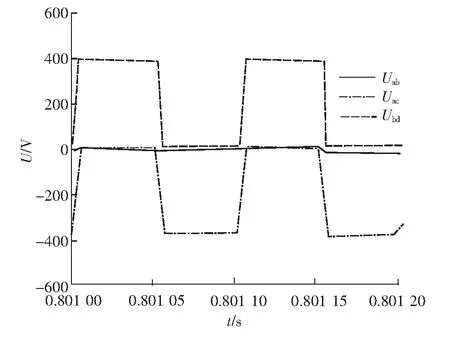
圖11 S2、S4開路電壓波形圖
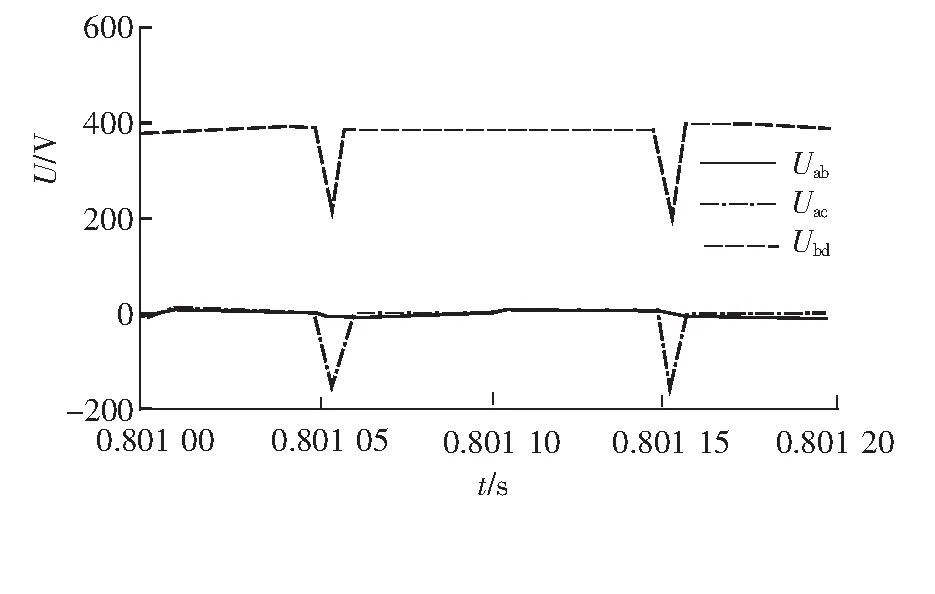
圖12 S3、S4開路電壓波形圖
將Uab、Uac、Ubd作為故障參數(shù)可有效區(qū)分變換器充電模式下單管、雙管開路故障。由于變換器結(jié)構(gòu)具有對稱性,同理,以Uef、Ueg、Ufh作為故障參數(shù),可有效識別變換器放電模式下單管、雙管開路故障。
3 特征向量提取與降維
3.1 小波包分析
MOSFET故障導致電路參數(shù)變化,小波包分析對故障參數(shù)低頻、高頻部分辨析度良好。采用小波包4層分解,選用db5小波,以頻段能量比作為故障特征向量。具體過程如下。
1)設(shè)E4,n為第4層n段頻帶能量值:
(1)
式中,dj,k(j=0,1,…,4;k=1,2,…,n)為各節(jié)點小波包系數(shù)。
2)計算總能量E0,ej為能量比:
(2)
(3)
3)構(gòu)建故障特征向量x:

(4)
表2為S1開路故障的小波包能量比。通過對比分析,Uab能量集中在e0、e1、e3、e6,Uac能量集中在e0、e5、e10、e14,Ubd能量集中在e0、e1、e3、e6。可知故障參數(shù)能量在高頻、低頻段皆有分布,所以小波包分析是適用于變換器故障數(shù)據(jù)的處理方法。
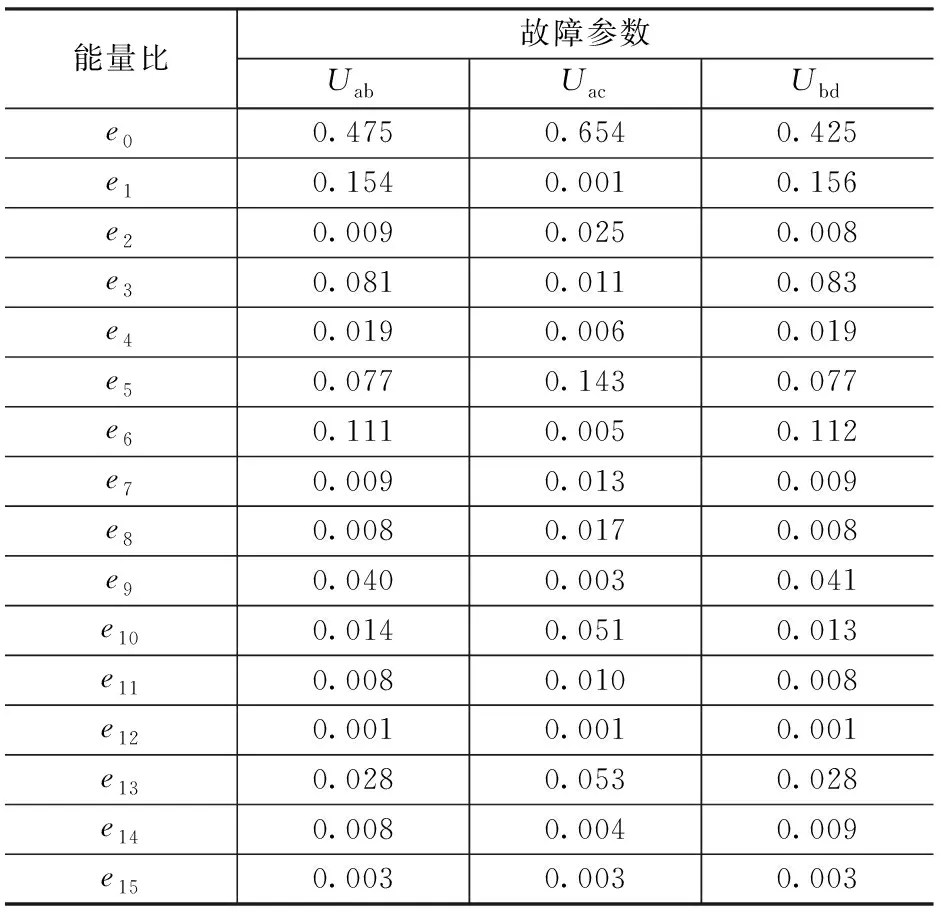
表2 S1開路故障小波包能量比
3.2 PCA降維
對故障特征向量進行PCA降維,以簡化神經(jīng)網(wǎng)絡(luò)輸入。以累計方差貢獻率Wm≥95%作為降維依據(jù),Wm越大則前m個主元包含的故障信息越多,每種故障參數(shù)取前3個主元(s1~s3)構(gòu)成9維故障特征向量。表3為S1開路故障累計方差貢獻率。
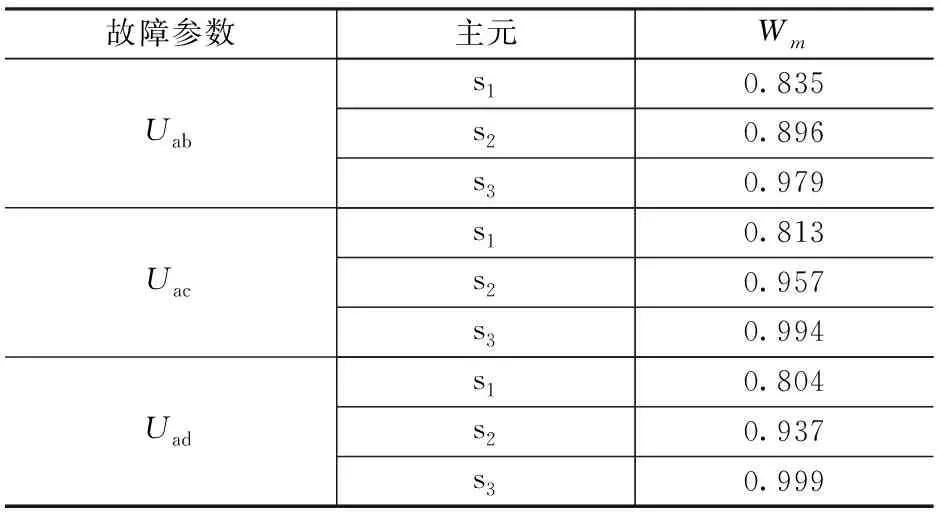
表3 S1開路故障累計方差貢獻率
4 基于GA-PSO優(yōu)化PNN的故障診斷
4.1 PNN故障分類器
PNN利用模式識別能力,完成故障樣本與故障類型的映射,實現(xiàn)故障診斷[6]。PNN訓練簡單、參數(shù)少,其網(wǎng)絡(luò)結(jié)構(gòu)如圖13所示。
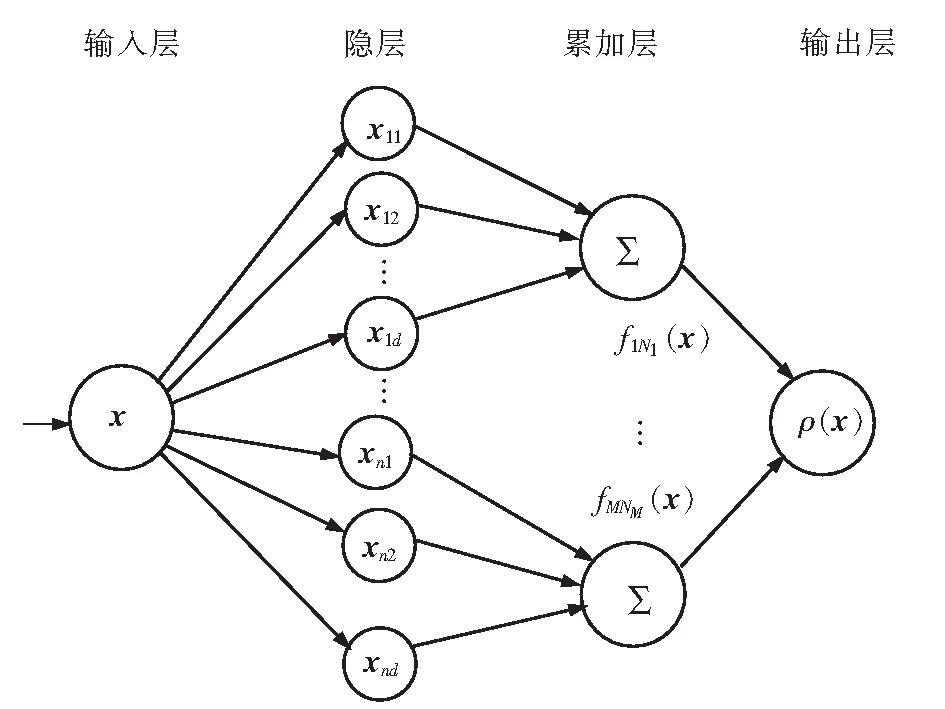
圖13 PNN網(wǎng)絡(luò)結(jié)構(gòu)圖
輸入層將故障特征向量x輸入網(wǎng)絡(luò);隱層神經(jīng)元個數(shù)為輸入樣本數(shù),權(quán)值為輸入向量的轉(zhuǎn)置,閾值b滿足:
(5)
式中,σ為平滑因子。
隱層負責求出故障特征向量x與故障類型的聯(lián)系Φij(x),計算公式為:
(6)
式中,i=1,…,M;j=1,…,Ni;M是故障類型總數(shù),Ni是i類故障樣本總數(shù);d是訓練樣本維度數(shù);xij是第i種故障第j隱層的中心向量,由輸入樣本經(jīng)高斯函數(shù)聚類求得。
累加層把同種故障的隱層輸出做加權(quán)平均,即條件概率密度fiNi(x),公式如下:
(7)
輸出層根據(jù)各輸入向量的概率估計,根據(jù)貝葉斯準則,將后驗概率最大的故障類型輸出,實現(xiàn)判斷樣本故障類別。
由公式(5)、(6)可知,σ是PNN唯一可調(diào)量,是影響故障分類性能的關(guān)鍵,設(shè)定恰當可令PNN故障診斷性能達到最佳。
4.2 GA-PSO優(yōu)化算法
選用GA-PSO算法對PNN平滑因子進行優(yōu)化,其兼顧遺傳算法與粒子群算法的優(yōu)勢,運算簡單、高效,以故障診斷錯誤率f作為算法適應度函數(shù)如下:
(8)
式中,aij是實際輸出故障類別;tij是期望輸出故障類別;N為樣本總數(shù);q為輸出向量維數(shù);PNN實際、期望輸出相同時,mij=1,否則mij=0。
粒子群算法令每個粒子以公式(9)、(10)進行速度、位置更新:
Vi(k+1)=ωVi(k)+c1r1[pi-xi(k)]+
c2r2[pg-xi(k)],
(9)
xi(k+1)=xi(k)+Vi(k+1),
(10)
式中,k是迭代數(shù);ω是慣性因子;c1、c2是學習因子;r1、r2是[0,1]間隨機數(shù);Vi(k)、xi(k)和Vi(k+1)、xi(k+1)分別為粒子i在k和k+1代的速度、位置;pi為粒子i所在列的個體極值,即該列診斷錯誤率最低的粒子;pg為群體的全局極值,即群體診斷錯誤率最低的粒子。
可將粒子更新公式合并為:
xi(k+1)=xi(k)+ωVi(k)+
c1r1[pi-xi(k)]+c2r2[pg-xi(k)] ,
(11)
式中,速度項ωVi(k)類似變異操作;c1r1[pi-xi(k)]、c2r2[pg-xi(k)]使粒子趨近于個體極值和全局極值,類似交叉操作。令變異操作代替ωVi(k),同時令xi(k)中粒子分別與pi、pg交叉,之后與速度項求和,完成粒子更新。算法經(jīng)多次迭代后,診斷錯誤率達到要求,則輸出平滑因子σ最優(yōu)解。
GA-PSO算法工作流程如下。
1) 初始化PNN,確定權(quán)值、隱層神經(jīng)元個數(shù)。初始化粒子群,根據(jù)σ取值范圍[0,1]隨機生成數(shù)量為N的二進制編碼粒子群;初始化粒子位置群矩陣p,速度矩陣v;設(shè)置迭代總數(shù)m及收斂精度E。
2) 計算每個粒子的故障診斷錯誤率,E為判斷終止條件,滿足則結(jié)束,否則繼續(xù)。篩選具有個體最低錯誤率、全局最低錯誤率的粒子,即個體極值、全局極值。
3) 通過變異操作,完成速度群更新。即令速度粒子的2/3處編碼位置隨機發(fā)生變異。位置群與個體極值、全局極值進行交叉,生成新位置群。即令位置粒子的2/3處編碼位置隨機與個體極值、全局極值進行交叉。將新位置群和新速度群求和,完成粒子群更新,即σ更新。
4) 重復2)、3)步驟,直到滿足終止條件,將最優(yōu)σ代入PNN進行訓練并驗證其故障性能。
4.3 GA-PSO算法參數(shù)設(shè)置
GA-PSO算法最大迭代數(shù)mmax=200,收斂精度E=0.001,交叉概率Pc=0.6,變異概率Pm=0.1,粒子總數(shù)N=100,學習因子c1=c2=1.49。
5 變換器故障仿真
參考小型混合動力游艇參數(shù)[7-8],搭建仿真模型。設(shè)置MOSFET故障并采集數(shù)據(jù),在MATLAB中完成數(shù)據(jù)處理和神經(jīng)網(wǎng)絡(luò)學習。系統(tǒng)參數(shù)如下:燃料電池20 kW,輸出電壓200 V;蓄電池電壓60 V,容量40 Ah;直流母線電壓380 V;純電阻負載15 kW,模擬設(shè)備耗能。變換器參數(shù)如下:儲能電感L=1.5×10-5H;濾波電容C1=C2=2×10-3F;Cc=1×10-3F;Rc=0.1 Ω;變壓器匝比n=5;開關(guān)頻率f=10 kHz,采樣頻率fs=300 kHz。
對比傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)(BPNN)和PNN性能,結(jié)果見表4;針對PNN進行3種算法優(yōu)化性能對比,結(jié)果見表5。其中,GA算法Pc=0.6,Pm=0.1,群體規(guī)模10,個體長度10;PSO算法N=100,c1=c2=1.49,粒子速度V上、下限為±0.001;最大迭代數(shù)mmax=200,收斂精度E=0.001。實驗過程如下。

表4 BPNN與PNN對比
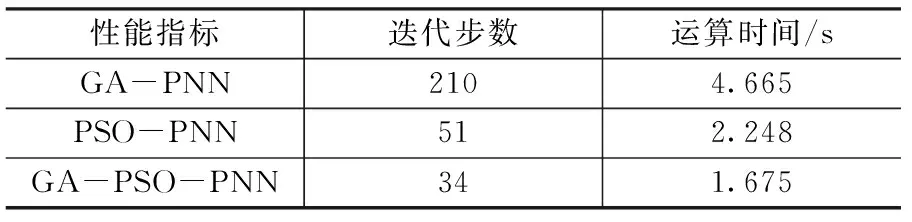
表5 優(yōu)化算法性能對比
1)考慮船舶實際工況,設(shè)定蓄電池電荷狀態(tài)(SOC)上、下限,即高于上限進行放電,低于下限進行充電。分別在SOC為95%~85%、SOC為75%~65%和負載狀態(tài)為100%、50%條件下,設(shè)置故障并對Uab、Uac、Ubd(Uef、Ueg、Ufh)進行采樣,每種故障采樣100組,每組500個采樣點。
2)同一工況下每種故障取40組數(shù)據(jù),總計800組,進行小波包分解,每組數(shù)據(jù)得到一個3×16矩陣。進行PCA降維,矩陣每行降為3維后合并為1行,則得到800×9故障特征向量矩陣Ttrain,作為神經(jīng)網(wǎng)絡(luò)訓練樣本。其余1 200組數(shù)據(jù)重復該步驟,得到一種工況下的測試樣本Ttest。
3)結(jié)合優(yōu)化算法,將各工況下Ttrain和對應故障代碼作為PNN訓練依據(jù),并利用Ttest驗證PNN故障診斷效果。
由表4可知,相比于BPNN,PNN訓練時間和單次分類時間更短,故障診斷性能更優(yōu)。
表5可知,GA-PSO-PNN收斂于第34代,PSO-PNN收斂于第51代,且GA-PSO-PNN運算時間最短,彌補了GA、PSO算法后期收斂慢的缺陷。所以GA-PSO-PNN參數(shù)尋優(yōu)效果最好。
6 結(jié)束語
本文以雙向全橋型DC-DC變換器作為研究對象,分析MOSFET開路故障信號特征。使用小波包進行特征向量提取,并利用PCA降維。PNN比傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)更適用于故障診斷,綜合性能發(fā)更優(yōu)。GA-PSO算法兼顧全局搜索和快速收斂特性,利用其尋優(yōu)PNN參數(shù),效率更高。仿真實驗表明,基于小波包分析和GA-PSO優(yōu)化PNN的雙向全橋DC-DC變換器MOSFET開路故障診斷方法,診斷效果良好,滿足實際要求。
猜你喜歡
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
北京航空航天大學學報(2016年6期)2016-11-16 01:50:43
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
