基于鴿群層級交互的有人/無人機(jī)集群一致性控制
2020-10-12 07:31:10趙建霞段海濱趙彥杰范彥銘
上海交通大學(xué)學(xué)報 2020年9期
趙建霞,段海濱,趙彥杰,范彥銘,魏 晨
(1.北京航空航天大學(xué) 自動化科學(xué)與電氣工程學(xué)院,北京100083;2.中國電子科技集團(tuán)公司電子科學(xué)研究院,北京 100041;3.中國航空工業(yè)集團(tuán)公司 沈陽飛機(jī)設(shè)計研究所,沈陽 110035)
由于可靠性和智能化程度有限,無人機(jī)(UAV)對環(huán)境的感知和決策等智能系統(tǒng)還不能完全取代人的思維和判斷,難以滿足復(fù)雜戰(zhàn)場環(huán)境中的高層次自主和智能要求,短時期內(nèi)無法實(shí)現(xiàn)完全無人的作戰(zhàn)模式[1].所以有必要開展對有人機(jī)(MAV)和無人機(jī)集群協(xié)同作戰(zhàn)的研究,充分利用無人機(jī)機(jī)動能力強(qiáng)、成本低、隱身性能好的優(yōu)勢,消除有人機(jī)在惡劣條件下執(zhí)行任務(wù)的風(fēng)險[2].同時,充分利用有人機(jī)中人的綜合判斷能力,實(shí)現(xiàn)共融集群的綜合決策和任務(wù)管理.有人/無人機(jī)共融可以充分發(fā)揮各自的優(yōu)勢,從而增強(qiáng)整體的智能決策水平[1].
針對有人/無人機(jī)集群(MUMS)的協(xié)作問題,Chen等[3]針對決策結(jié)構(gòu)特點(diǎn),基于模糊認(rèn)知圖實(shí)現(xiàn)了有人機(jī)和無人機(jī)在行為決策方面的協(xié)作,但該方法沒有深入研究有人機(jī)操作員的個體行為.Zhong等[4]在任務(wù)層上按照任務(wù)類型將有人/無人機(jī)系統(tǒng)劃分為3個層次級別,并針對不同層次構(gòu)建相應(yīng)的任務(wù)聯(lián)盟.但該方法沒有對執(zhí)行相應(yīng)任務(wù)的飛行控制進(jìn)行分析.因此,對操作員行為特性的分析和集群一致性控制是研究的重點(diǎn).但是,集群控制中的協(xié)同交互大多采用平等交互模式,其信息傳遞效率和適應(yīng)能力一般.
近年來,鴿群飛行中的層次結(jié)構(gòu)引起了研究者們對集群運(yùn)動和工程應(yīng)用的廣泛關(guān)注.鴿群個體的智能水平雖然不高,但可以實(shí)現(xiàn)不同群集規(guī)模之間的群體同步.Nagy等[5-6]發(fā)現(xiàn)了鴿群內(nèi)部存在隱式分層網(wǎng)絡(luò).在這種層級結(jié)構(gòu)中存在與鴿群個體相對應(yīng)的等級體系,總領(lǐng)導(dǎo)者處于絕對領(lǐng)導(dǎo)地位,在其影響下,其他個體按等級由高到低依次跟隨.此外,在鴿群層級交互網(wǎng)絡(luò)中,低等級個體只能從高等級個體接受信息,即信息流是單向的.Zafeiris等[7]證明了層級交互模式的信息傳遞速度比平等交互模式更快,效率更高.Flack等[8]發(fā)現(xiàn)這種具有特定社會結(jié)構(gòu)的層級交互模式可以補(bǔ)償個體導(dǎo)航誤差,提高群體導(dǎo)航精度.Luo等[9]提出一種用于多無人機(jī)飛行的分布式控制的基于鴿群層級交互機(jī)制的框架,實(shí)現(xiàn)了無人機(jī)的集群控制.雖然鴿群層級交互機(jī)制具有獨(dú)特的優(yōu)越性,并在無人機(jī)集群方面有所應(yīng)用,但該機(jī)制沒有擴(kuò)展到有人/無人機(jī)集群系統(tǒng)中.
針對有人/無人機(jī)集群系統(tǒng),提出一種基于鴿群層級交互機(jī)制的一致性控制方法.首先,考慮無人機(jī)動力學(xué)和人的視覺與動作響應(yīng)特性,建立有人/無人機(jī)模型.其次,基于鴿群層級交互機(jī)制,構(gòu)建有人/無人機(jī)集群系統(tǒng)層級網(wǎng)絡(luò)結(jié)構(gòu).相比于信息雙向流通的平等交互模式,信息流單向的層級交互模式具有高效的信息傳遞和良好的適應(yīng)性能.此外,提出一種自適應(yīng)牽制控制策略,該策略可以有選擇地對網(wǎng)絡(luò)中的小部分節(jié)點(diǎn)施加控制,并自動調(diào)節(jié)控制參數(shù),從而極大地節(jié)約了資源.最后,進(jìn)行仿真試驗(yàn),對有人機(jī)操作員模型的可行性和有人/無人機(jī)一致性控制的有效性以及層級交互模式的優(yōu)越性進(jìn)行分析.
1 有人/無人機(jī)建模
有人/無人機(jī)共融集群系統(tǒng)整體結(jié)構(gòu)主要由有人機(jī)(含操作員)、有人機(jī)和無人機(jī)之間的交互接口以及多架無人機(jī)[10]共三部分組成.有人/無人機(jī)的一致性控制問題是研究重點(diǎn).
1.1 固定翼無人機(jī)的動力學(xué)模型
假設(shè)每架無人機(jī)都配備了空速、航向和高度自動駕駛儀,那么無人機(jī)全狀態(tài)模型可簡化為點(diǎn)質(zhì)量模型[9]:
(1)
(2)
(3)
(4)
(5)
(6)
式中:Xi是地面慣性坐標(biāo)系O-xgygzg中沿xg軸的位移;Yi是沿yg軸的位移;Hi是高度;vi是速度,假設(shè)vi等于空速且無任何干擾;γi、χi和φi分別是飛行航跡角、傾斜角和航向角;Ti、Di和Li分別是推力、阻力和升力;mi是質(zhì)量;g是重力加速度.
使用反饋線性化對非線性的模型進(jìn)行預(yù)線性化:
(7)

vmin≤vi≤vmax
(8)
(9)
1.2 多通道的有人機(jī)操作員模型
有人機(jī)操作員是一個具有非線性特性的生物系統(tǒng),如果經(jīng)過適當(dāng)培訓(xùn),在恒定條件下進(jìn)行操作時,可以用準(zhǔn)線性時不變模型描述[11].圖1為多通道的有人機(jī)操作員模型,操作員通過受控設(shè)備CD(如操縱桿等)控制整個系統(tǒng)(CE),同時遵循期望值并補(bǔ)償力干擾(Fd).控制回路中存在兩個頻率響應(yīng)函數(shù)HV和HA,這兩種響應(yīng)并行運(yùn)行,表示對不同感知輸入的響應(yīng).內(nèi)、外部控制環(huán)分別表示操作員的動作和視覺響應(yīng).動作響應(yīng)由手臂導(dǎo)納ADM的倒數(shù)表示[12].殘余信號(n′)被添加到操作員的輸出中,以解決操作員的非線性行為[13].
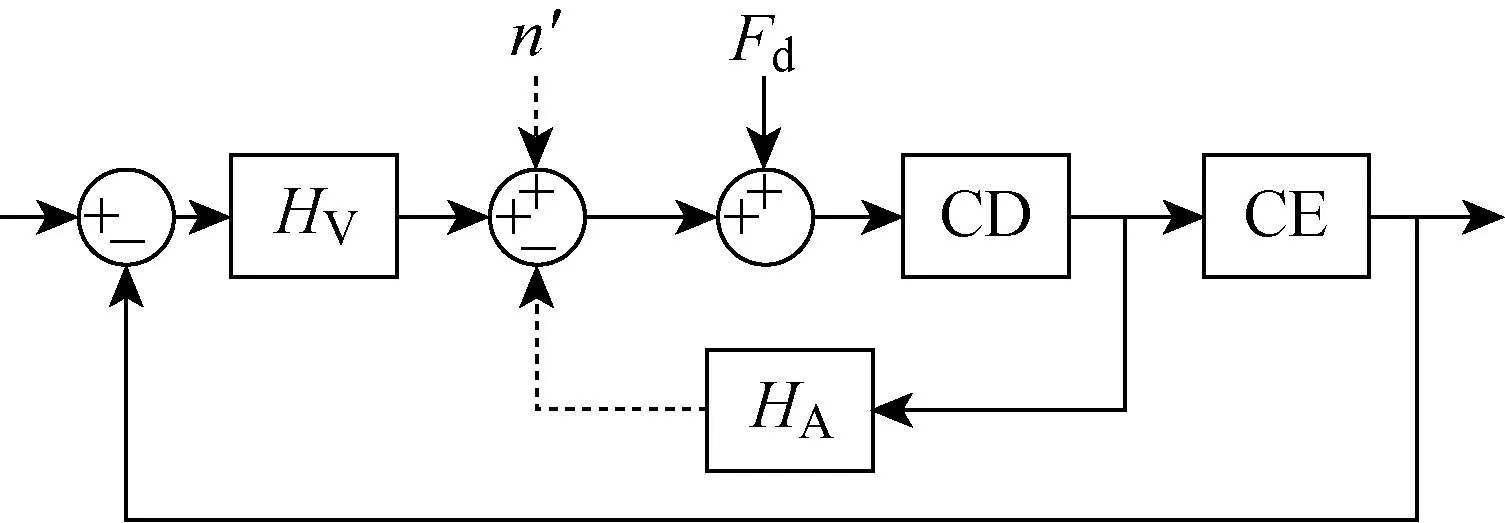
圖1 多通道有人機(jī)操作員模型示意圖Fig.1 Diagram of a multi-channel operator model
由于圖1中虛線箭頭所表示的信號無法測量,所以無法直接獲得HV和HA.Olivari等[13]提出了幾種多通道感知和控制行為的建模方法.其中,譜密度估計法可以明確考慮控制任務(wù)的多環(huán)性質(zhì),不需要視覺誤差功率的無干擾假設(shè)條件.因此基于譜密度法,估計目標(biāo)位置輸入到受控元件的閉環(huán)頻率響應(yīng)函數(shù):
(10)

(11)
(12)

(13)
式中:HCD和HCE分別是受控設(shè)備和整個系統(tǒng)的頻率響應(yīng)函數(shù).
基于上述模型,設(shè)計如圖2所示的有人/無人機(jī)共融集群系統(tǒng)控制結(jié)構(gòu).
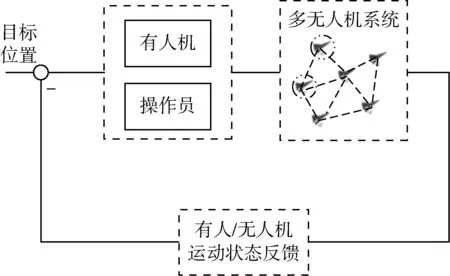
圖2 有人/無人機(jī)共融集群系統(tǒng)控制結(jié)構(gòu)圖Fig.2 Control structure of MUMS system
2 基于鴿群層級交互機(jī)制的一致性控制
2.1 鴿群層級交互機(jī)制
在鴿群層級交互網(wǎng)絡(luò)中,每只鴿子都跟隨著具有較高等級的個體[5].層級領(lǐng)導(dǎo)網(wǎng)絡(luò)僅包含定向的傳遞性領(lǐng)導(dǎo)者與跟隨者之間的關(guān)系[14].在決定鴿群的運(yùn)動方面,等級越高的鴿子越具影響力.考慮有向圖G=(V,E,A),其中V={V1,V2,…,VN}和E?{(Vi,Vj)|Vi,Vj∈V}是節(jié)點(diǎn)的集合,A=(aij)∈RN×N是G的非負(fù)鄰接矩陣.G的有向邊eij由(Vi,Vj)表示,說明節(jié)點(diǎn)Vi可以從節(jié)點(diǎn)Vj接收信息.當(dāng)且僅當(dāng)G中存在有向邊(Vi,Vj)時,A中的對應(yīng)元素aij>0.將拉普拉斯矩陣L=(lij)∈RN×N定義為
lij=-aij(i≠j)
若鴿子i和j之間的通信范圍Rc和距離Rij滿足Rij≤Rc,則個體i和j之間存在通信連接eij=(Vi,Vj),說明eij中存在領(lǐng)導(dǎo)-跟隨關(guān)系[15].鴿群層級分布如圖3所示,箭頭表示鴿子間的領(lǐng)導(dǎo)-跟隨關(guān)系.規(guī)定跟隨鴿在每一個等級中均為兩只,頭鴿不受任何鴿子的領(lǐng)導(dǎo)[16].基于該機(jī)制,構(gòu)建有人/無人機(jī)集群的層級交互拓?fù)浣Y(jié)構(gòu),等級較高的幾架無人機(jī)將與有人機(jī)進(jìn)行交互,獲得來自有人機(jī)的控制指令.在有人機(jī)的飛行決策對等級較高的無人機(jī)產(chǎn)生影響后,通過層級網(wǎng)絡(luò)中的信息交互,實(shí)現(xiàn)有人/無人機(jī)共融集群的一致性運(yùn)動.每個個體i的鄰居集合:
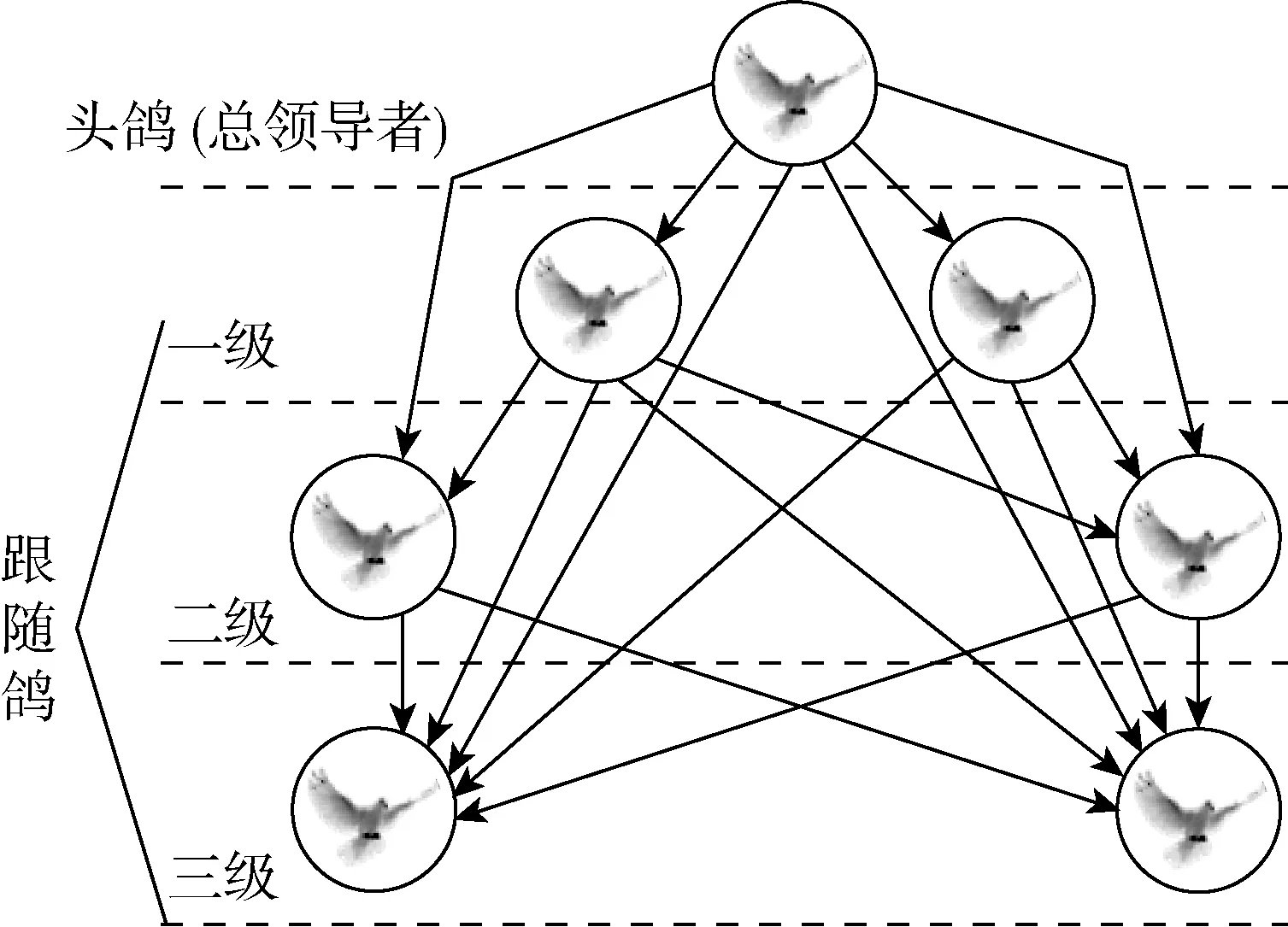
圖3 鴿群層級示意圖Fig.3 Hierarchical leadership network of pigeons
Neighi={j|‖dij‖≤Rc,j≠i}
(14)
規(guī)定無人機(jī)NL為總領(lǐng)導(dǎo)者,則所有無人機(jī)的等級可表示為
Ranki=
(15)
2.2 有人/無人機(jī)協(xié)同運(yùn)動的牽制控制策略
定義可以與有人機(jī)進(jìn)行交互的無人機(jī)集合為Nh,即Nh中的無人機(jī)會直接接收到有人機(jī)的輸入,有人機(jī)也僅能在屬于Nh的無人機(jī)中獲得信息.考慮如下預(yù)期控制目標(biāo):

(16)

(17)
式中:i=1,2,…,N+1;Δxi(t)和Δυi(t)分別是無人機(jī)i的位置和速度的誤差向量;xe(t)是期望位置;υe(t)是期望速度;υi(t)是無人機(jī)i的速度向量;且
所有無人機(jī)或有人機(jī)都漸進(jìn)趨近xe(t)和υe(t),從而實(shí)現(xiàn)運(yùn)動同步.
基于自適應(yīng)牽制控制策略[17],設(shè)計如下控制輸入:
(18)

其中:
K0=(L+D)?In
D=diag{d1,d2,…,dN}
In為n階單位矩陣;μ為一個大于0的常數(shù);ξ(t)為所有個體當(dāng)前運(yùn)動狀態(tài)與期望值之差的列向量.此外,INn和0Nn分別表示N×n維的單位矩陣和元素均為0的矩陣;0(Nn)×1表示元素有N×n個0的列向量.
dmax=max(di),i∈Nh
則存在常數(shù)α>0,令

αΔx(t)TΔx(t)
(19)
式中:|Nh|為集合Nh中的數(shù)量;Δx(t)為位置誤差向量,且
Δx(t)=[Δx1(t) Δx2(t) … ΔxN+1(t)]T
由式(7)和(18),對個體i的位置和速度誤差進(jìn)行求導(dǎo):
(20)
假設(shè)存在常數(shù)α>0、λ*>0,滿足L+D的最小特征值λmin>1且Γ為負(fù)定矩陣時,系統(tǒng)在控制律的作用下可達(dá)到期望的位置和速度.其中:
Γ=
考慮李雅普諾夫函數(shù):
(21)
由上述條件可知,該函數(shù)是正定的,對其求導(dǎo):
(22)
根據(jù)矩陣不等式2xTy≤xTGx+yTG-1y,由式(22)的第一項(xiàng)推導(dǎo)可得:
(23)
式中:Δυ(t)為速度誤差向量,且
Δυ(t)=[Δυ1(t) Δυ2(t) … ΔυN+1(t)]T
由于Γ為負(fù)定矩陣且V(t)是正定的,所以推導(dǎo)可得:
(24)
因此,根據(jù)李雅普諾夫穩(wěn)定性理論,系統(tǒng)在控制律作用下可以實(shí)現(xiàn)對位置和速度的一致性控制.
3 仿真驗(yàn)證
通過仿真實(shí)驗(yàn)驗(yàn)證多通道有人機(jī)操作員模型的可行性和自適應(yīng)牽制控制策略的有效性,同時與平等交互模式下的有人/無人機(jī)共融集群的運(yùn)動結(jié)果對比,驗(yàn)證采用鴿群層級交互機(jī)制的優(yōu)越性.
基于文獻(xiàn)[13]參數(shù)值,可得到在復(fù)頻域(s域)上的多通道操作員模型.通過三階低通濾波器Hn′(s)濾波后的高斯白噪聲獲得模型中的殘余噪聲:
(25)
式中:Kn′為增益,且Kn′=2.12.視覺響應(yīng)環(huán)節(jié)通過增益、超前滯后濾波器和時間延遲建模:
(26)
式中:KV=20 N/rad;T1=0.3 s;T2=0.04 s;τ=0.270 1 s.動作響應(yīng)環(huán)節(jié)的傳遞函數(shù)為
(27)
式中:a1=4.566×10-6;a2=0.004 6;a3=1.33;a4=97.52;b1=82;b2=721.2;b3=1.167×10-4.
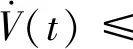
人為因素限制了控制回路中的動力含量,因此帶寬要求不應(yīng)太高[13].有人機(jī)操作員模型的閉環(huán)頻率響應(yīng)函數(shù)的波特圖如圖4所示.其中,ω為頻率,G′為響應(yīng)增益,θ為相位.當(dāng)G′下降至-3 dB時,ω約為2.44 rad/s,滿足文獻(xiàn)[13]中的帶寬條件.
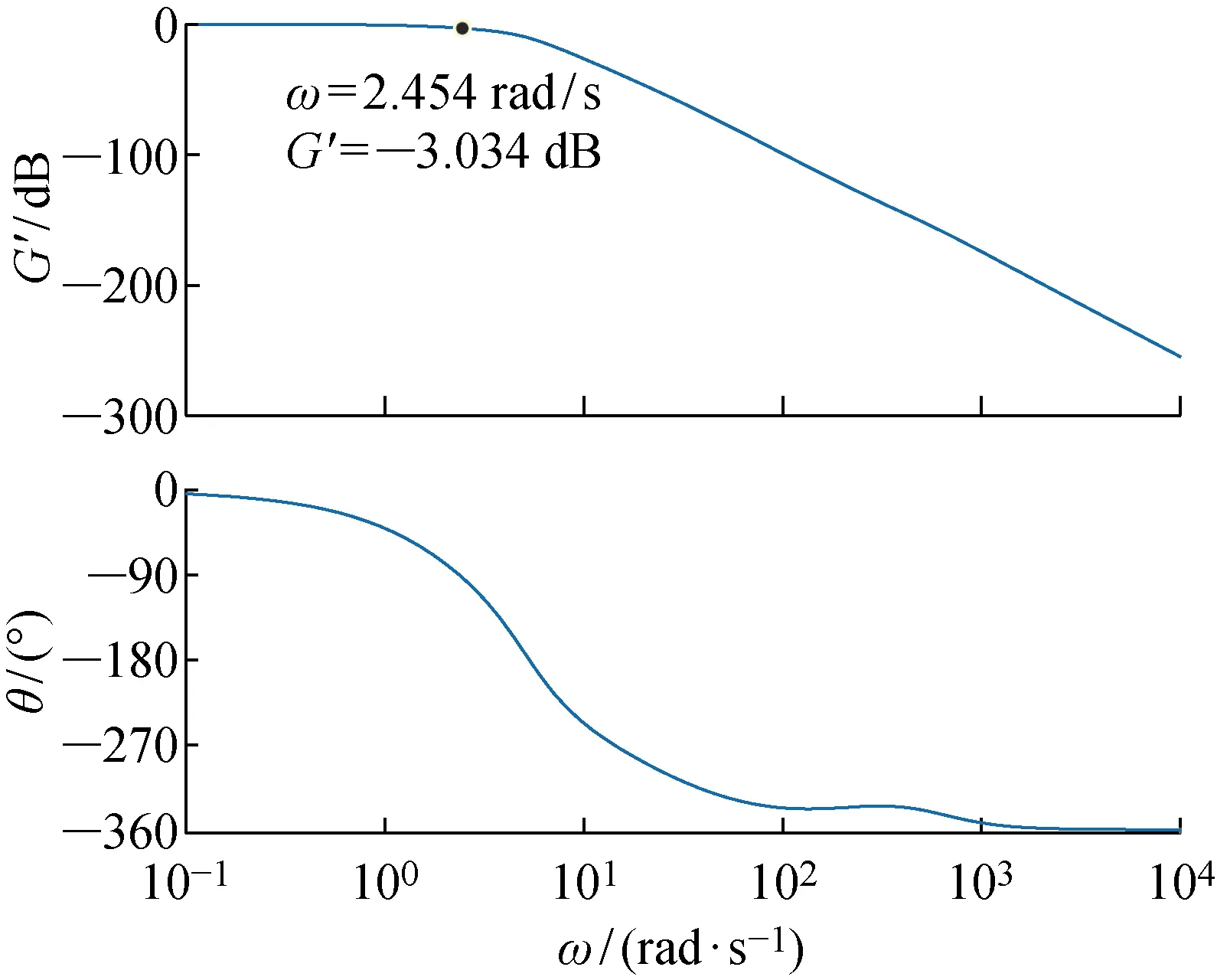
圖4 閉環(huán)頻率響應(yīng)Fig.4 Closed-loop frequency response
設(shè)有1架有人機(jī)和10架無人機(jī),初始速度在0~25 m/s內(nèi)隨機(jī)生成,初始位置在點(diǎn)(35,35,15) m附近隨機(jī)生成.目標(biāo)位置向量為(200,200,15) m,目標(biāo)速度為10 m/s.當(dāng)?shù)诌_(dá)目標(biāo)點(diǎn)附近時,仿真停止.有人機(jī)操作員在生理和心理等方面存在限制,因此可交互的無人機(jī)數(shù)量有限.假設(shè)有人機(jī)可與3架無人機(jī)交互,則在平等交互模式下,有人機(jī)將選擇與其距離最近的3架無人機(jī).而在層級交互模式下,有人機(jī)將選擇等級最高的3架無人機(jī).與有人機(jī)交互的無人機(jī)i對應(yīng)的交互控制增益di=30.在層級交互模式下,集群的三維運(yùn)動軌跡如圖5所示.由圖可知,無人機(jī)群體在高層級無人機(jī)個體和有人機(jī)的引領(lǐng)下抵達(dá)目標(biāo)點(diǎn).
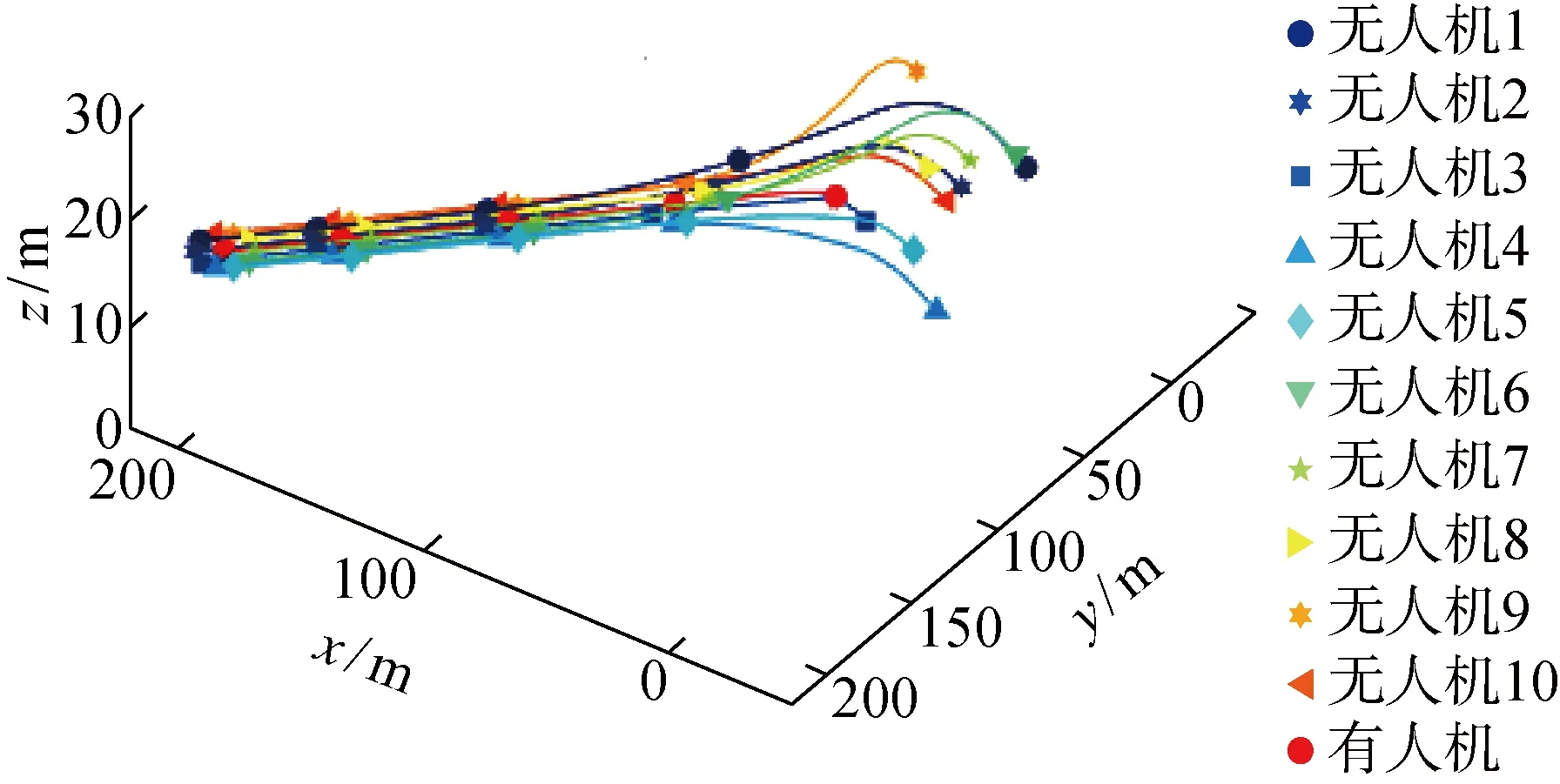
圖5 三維運(yùn)動軌跡Fig.5 Three dimensional trajectory
圖6為個體在層級交互模式下速度和位置的均方根誤差(RMSEv和RMSEp),所有個體的RMSEv和RMSEp均趨于0.此外,可以采用平均歸一化速度的絕對值作為序參量[19]來衡量同步程度:初始時刻的運(yùn)動較為混亂無序,序參量接近0;由計算可知,仿真開始后,層級交互模式的序參量迅速上升至 0.942 8,而平等交互模式的序參量小于0.8,說明層級交互模式下集群的同步程度較高.
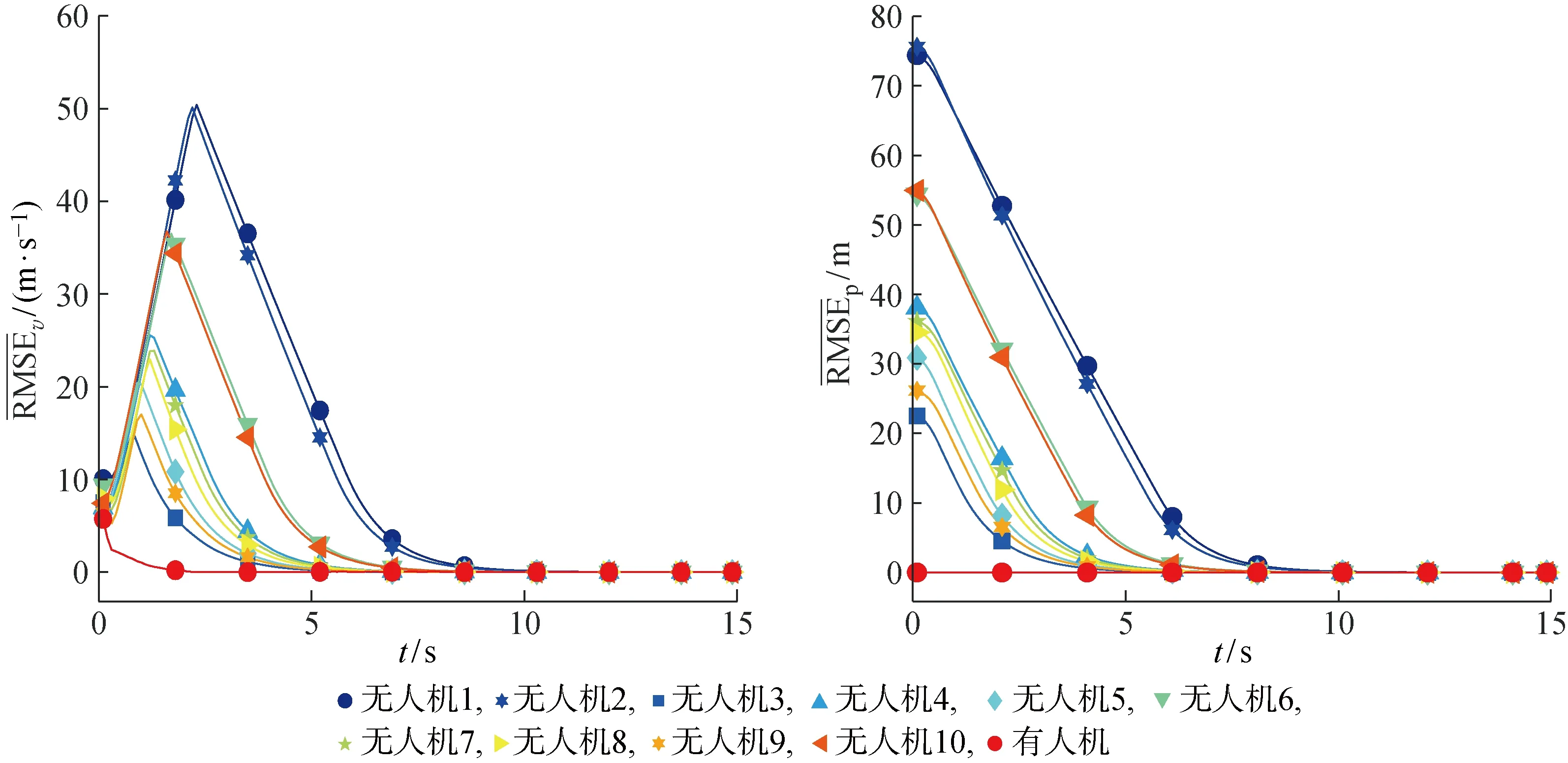
圖6 有人機(jī)與無人機(jī)的均方根誤差Fig.6 RMSE of MAV and UAVs

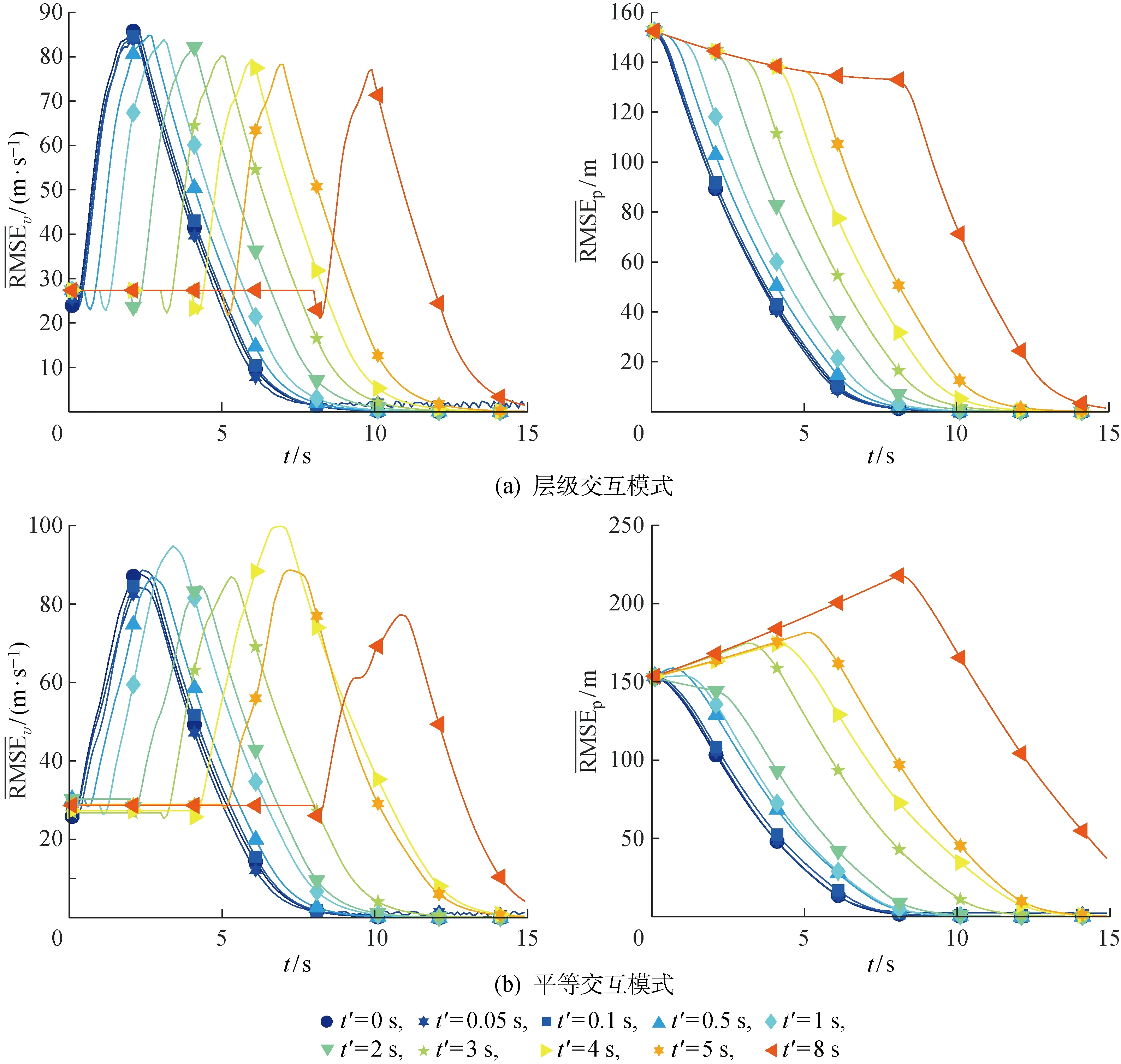
圖7 不同模式下的交互時延影響Fig.7 Effect of interaction delays in different modes

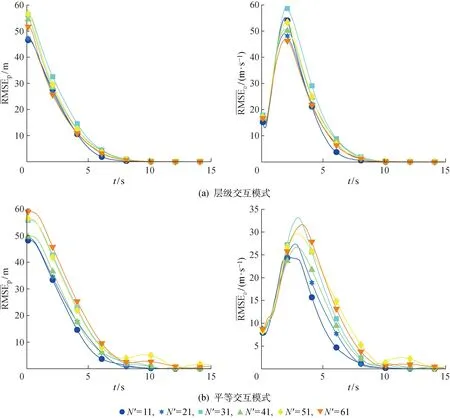
圖8 不同模式下的集群數(shù)量影響Fig.8 Effect of swarm numbers in different modes
4 結(jié)語
針對有人機(jī)和多無人機(jī)系統(tǒng)的一致性控制問題,在建立的多無人機(jī)系統(tǒng)動力學(xué)模型和多通道有人機(jī)操作員模型的基礎(chǔ)上,通過鴿群層級交互機(jī)制構(gòu)建集群系統(tǒng)層級交互網(wǎng)絡(luò),設(shè)計了一種可節(jié)約資源的自適應(yīng)牽制控制策略,實(shí)現(xiàn)有人/無人機(jī)集群運(yùn)動的同步,并對系統(tǒng)穩(wěn)定性進(jìn)行了簡要分析.通過仿真試驗(yàn),證明了該有人機(jī)操作員模型的合理性.通過對比兩種不同交互模式下的仿真結(jié)果,驗(yàn)證了鴿群層級交互機(jī)制的有效性和適用性.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學(xué)問題(2021年4期)2021-11-05 07:02:34
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中國公共安全(2017年11期)2017-02-06 05:28:08
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
燕山大學(xué)學(xué)報(2015年4期)2015-12-25 02:19:49