基于英飛凌TC275的火箭智能穩定控制演示平臺設計
2020-09-29 08:43:56羅軼欣王俊鴻龍弟之
實驗技術與管理 2020年7期
關鍵詞:模型
羅軼欣,王俊鴻,聞 新,龍弟之
(南京航空航天大學 航天學院,江蘇 南京 210016)
自動控制技術被廣泛應用于航天領域,如衛星的軌道及姿態控制、運載火箭的姿態控制等。而“航天器控制技術與應用”則是專門針對航天類專業開設的控制課程,其中運載火箭姿態控制原理內容比較抽象,控制對象比較復雜,屬于非線性問題。在實驗教學過程中,運載火箭控制過程通常會采用計算機進行模擬仿真演示,只能根據過程狀態量的變化曲線進行講解與分析。對于初次接觸航天專業知識的學生來說,仿真實驗過于理論化,可操作性和可視化程度不高,不利于培養他們的獨立思考精神和學習興趣。
在航天工程中,運載火箭垂直上升段屬于加速段,涉及俯仰、滾轉和偏航三通道的姿態控制[1-2],其中俯仰角的控制可以抽象成傳統倒立擺的穩定控制[3-5]。基于此,為了讓學生對運載火箭垂直上升段姿態變化和控制過程有更直觀的了解,本文在機械結構創新的基礎上,結合運載火箭姿態控制原理及智能控制算法,以英飛凌TC275為控制芯片設計了火箭加速上升段穩定控制演示平臺,并利用 MATLAB對控制算法進行仿真和驗證測試。該演示平臺應用于實驗教學中,能夠加深學生對航天控制系統理論知識的理解,提高學生的動手創新能力,達到理論與實踐相結合的教學要求。
1 基本設計思路
綜合考慮平臺的穩定性以及各部件的尺寸大小、安裝位置,用Solidworks軟件對火箭智能穩定控制演示平臺的機械結構進行設計,3-D模型如圖1所示。
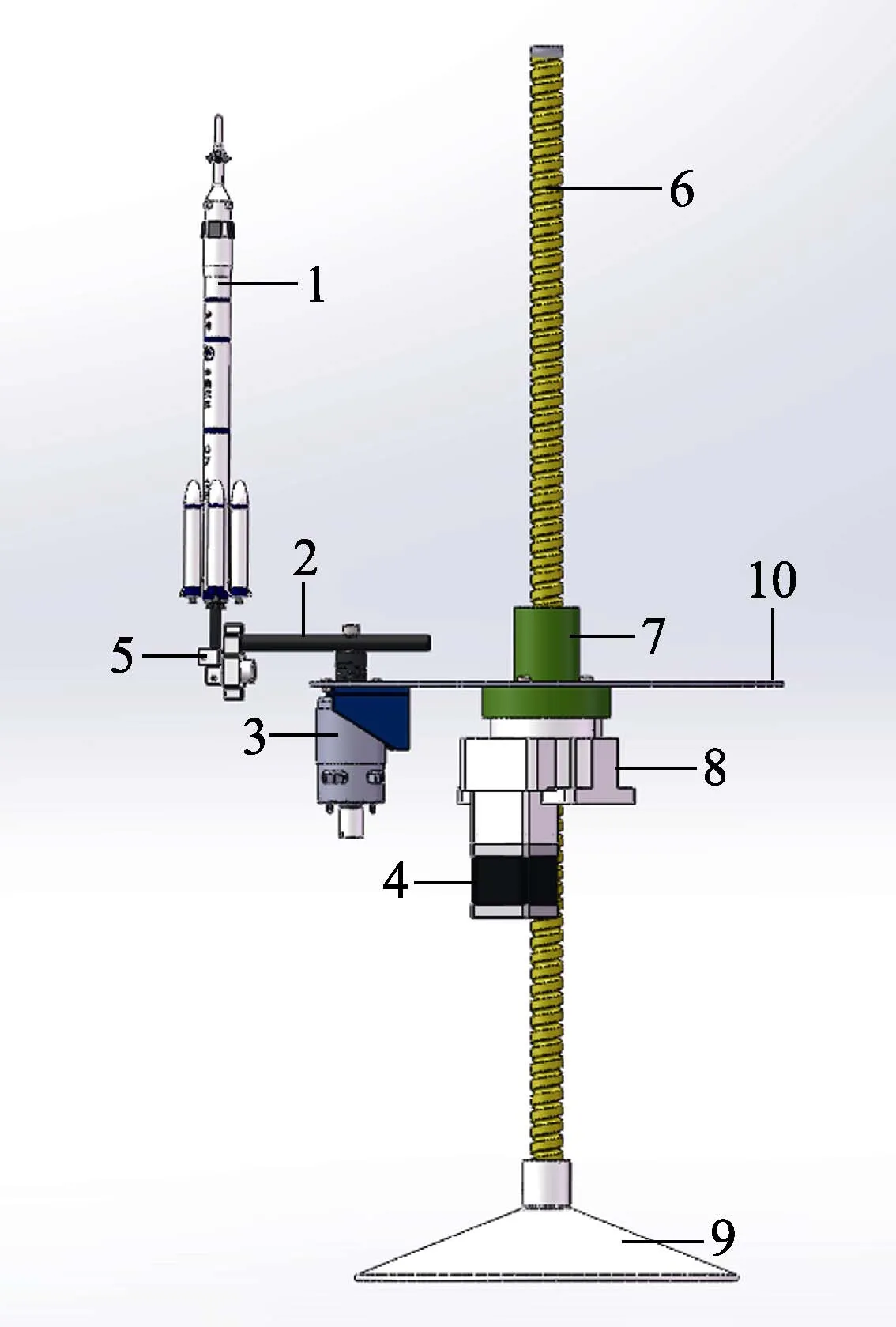
圖1 平臺3-D模型
平臺控制器采用的是英飛凌TC275多核芯片,該芯片包含3個200 MHz、32位的CPU內核(CPU0、CPU1、CPU2),它們共享總線資源,分別擁有自己獨立的RAM,每個內核都可以訪問任何外設。該芯片支持I2C、SPI以及UART通信,擁有12個模數轉換器(ADC)、12個PWM通道、3個內部時鐘。該芯片足以滿足平臺工作需求。平臺控制部分設計充分利用芯片多核優勢,將控制任務分為兩部分:CPU0控制抬升裝置,實現平臺加速上升;CPU1則實現火箭模型的穩定控制。當系統啟動時, CPU0驅動步進電機帶動中空電機減速箱,使控制平臺在絲杠上做加速上升運動。角度傳感器和直流電機編碼器分別測得火箭模型的俯仰角1θ和轉臂的轉動角度2θ,測得的數據通過ADC通道傳入CPU1,通過相應的控制算法計算控制量,并利用驅動模塊控制直流電機加速或減速來實現火箭模型俯仰角和轉臂轉動角度穩定在期望值。平臺總體設計框圖如圖2所示。
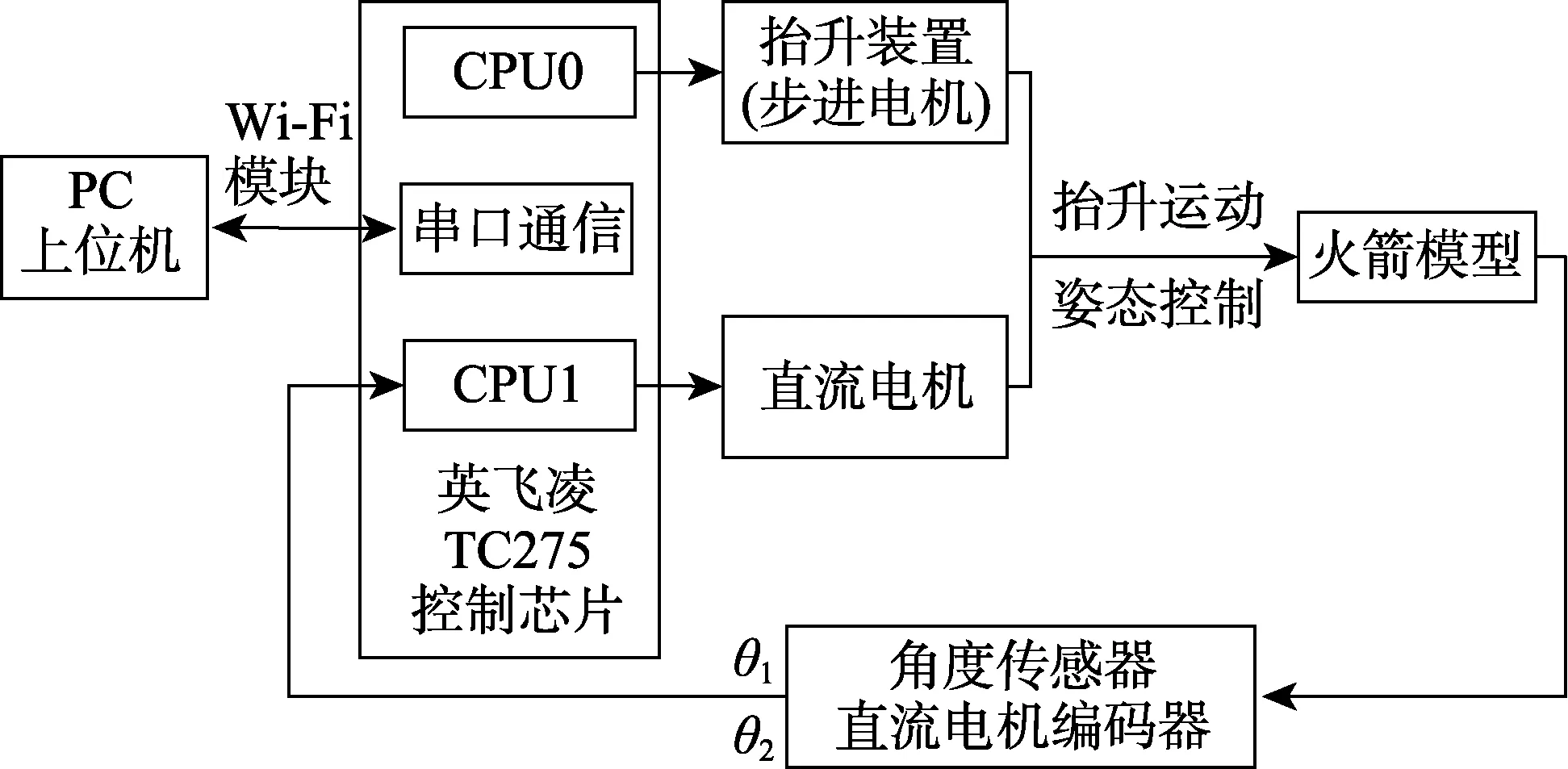
圖2 平臺總體設計框圖
2 模型建立
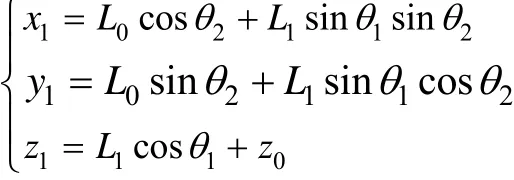
由于控制平臺是加速上升的,數學模型建立在傳統的旋轉倒立擺數學模型基礎上,引入了一個平臺豎直向上的位移量z0。選用歐拉-拉格朗日法對平臺數學模型進行分析[6-7],建立如圖3所示的坐標系。

圖3 平臺建模分析簡圖
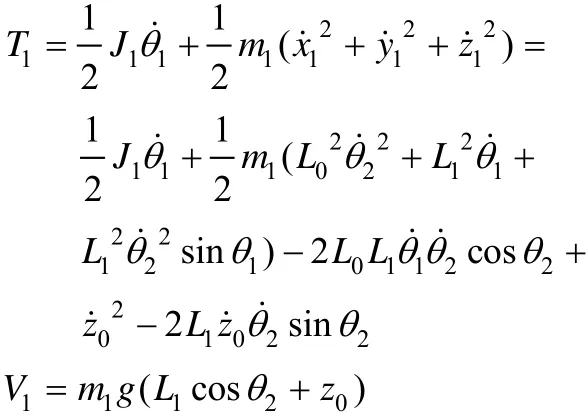
轉臂的動能、勢能分別為:

火箭模型在坐標系中存在如下關系:
火箭模型的動能、勢能分別為:
根據拉格朗日方程:
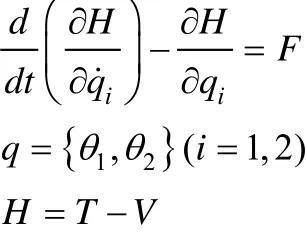
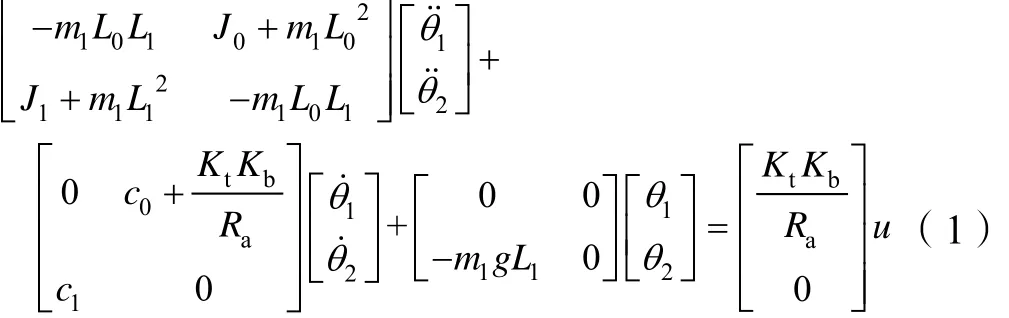
系統中物理量的實際值如表1所示。
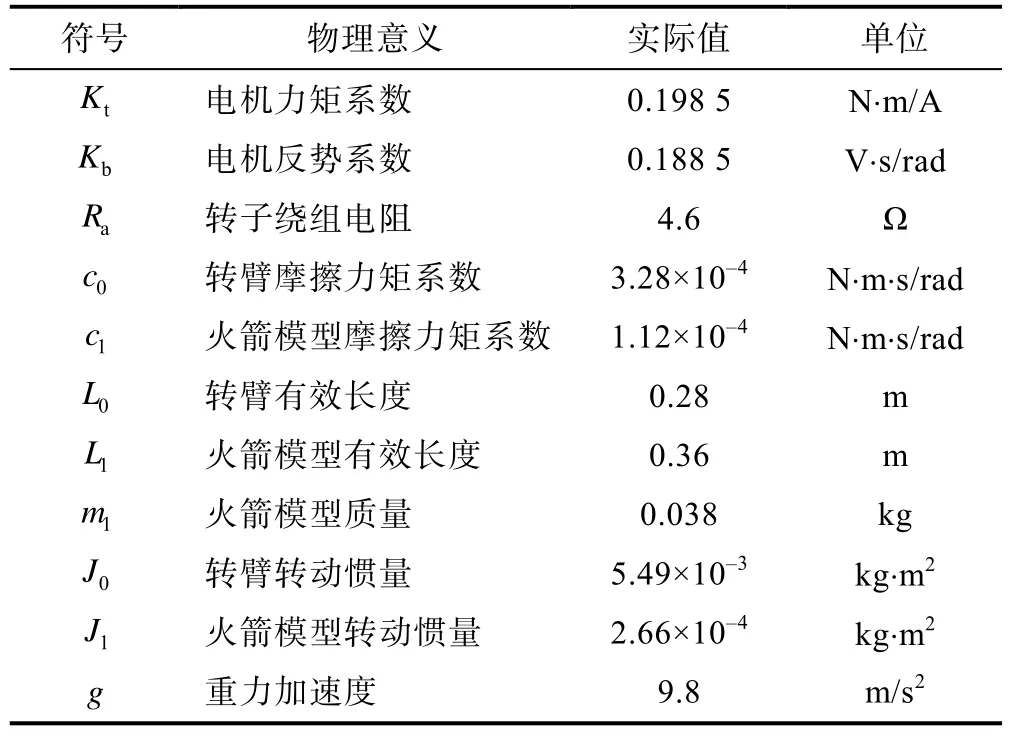
表1 系統物理量實際值
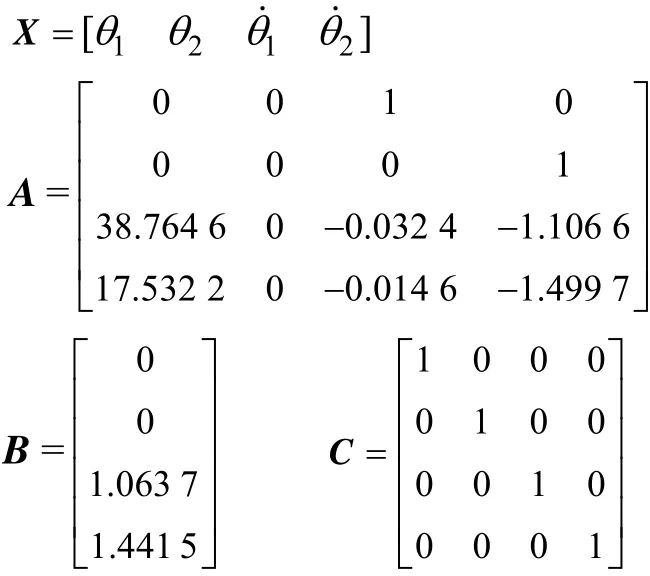
將各物理量代入方程(1)中,得到系統狀態空間表達式為
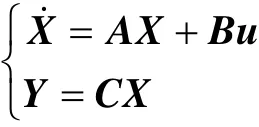
其中:
3 控制器設計與仿真
3.1 PID控制算法
PID是目前應用最廣泛的工業控制器,如今運載火箭的姿態控制方法仍以傳統的PID控制算法為主。本平臺運用模型角度環和轉臂角度環的雙閉環PID控制算法實現對火箭模型的俯仰角的控制[8-9]。由于轉臂的轉動偏差對于火箭模型的俯仰角控制是一種干擾,因此兩個控制環的輸出要進行錯頻處理。在MATLAB平臺上進行Simulink仿真,驗證控制器的穩定性,設計控制律為

根據式(2),設該控制器的6個控制參數分別為Kp1、Kd1、Ki1、Kp2、Kd2、Ki2,PID 控制器的輸入分別為模型角度偏差量e1、轉臂角度偏差量e2。通過調試得到,模型角度環 PID參數為Kp1=300、Kd1=24、Ki1=110,轉臂角度環 PID 參數為Kp2=8、Kd2=13、Ki2=0.02時,控制性能最優。
3.2 BP神經網絡控制器
傳統的PID控制器在運行之前需要進行參數的整定,面對新的被控對象或者模型結構改變,原先整定好的參數無法實現較好的控制。BP神經網絡控制器作為一種智能控制器,具有較好的自適應學習能力和較強的魯棒性[10]。在不需要被控對象的準確數學模型情況下,BP神經網絡控制器通過數據集進行離線訓練,利用學習算法對網絡內部參數不斷進行修正,最終實現系統的穩定控制,為非線性系統建模和控制提供了有力的工具。
本節在節3.1的基礎上,用BP神經網絡控制器替代PID控制器,實現對火箭模型的穩定控制[11]。讓學生通過仿真和實驗操作,深入了解智能控制器,達到更好的教學效果。
首先,利用節3.1的仿真模型采集e1、e2和控制量u的數據集,共采集140 000組數據。對這些數據進行歸一化處理,以提高神經網絡控制器的收斂速度和控制精度。
然后,搭建 BP神經網絡控制器仿真模型。本文利用 MATLAB實現神經網絡的初始化和訓練[12]。設置輸入層、隱藏層及輸出層節點為[2 15 1],激活函數為purelin,為避免陷入局部極小值,選用Levenberg-Marquardt作為訓練算法。
訓練中,設置學習率為0.01,并選取兩個終止準則:迭代達到1 000次和最小訓練誤差小于0.001。利用處理后的數據集完成訓練后,通過gensim函數生成神經網絡控制器模塊,并在Simulink中搭建仿真模型,如圖4所示。
3.3 仿真與分析
將上述兩種控制器運用在相同初始條件的被控系統中,對仿真結果進行比較。
模型偏角、轉臂偏角、模型角速度以及轉臂角速度的初始條件設置為[1.3 rad, 0 rad, 0 rad/s, 0 rad/s],兩種控制器下的系統響應曲線如圖5所示。
從圖5(a)可以看出:使用PID控制器,火箭模型角度最大超調量為-0.54 rad(約為-31.33°),系統最終穩定時間約為1.46 s;使用BP神經網絡控制器,火箭模型角度最大超調量為-0.56 rad(約為-32.41°),系統最終穩定時間約為1.3 s;PID控制器總體上符合系統控制要求。
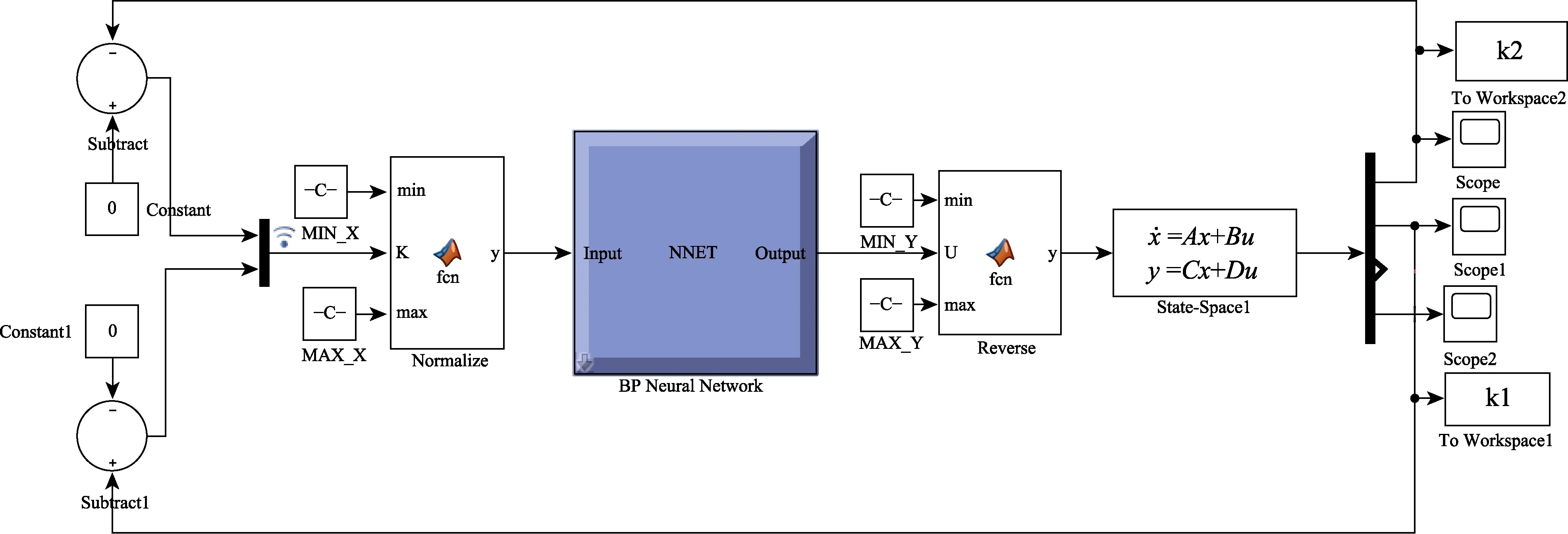
圖4 BP神經網絡控制器仿真圖
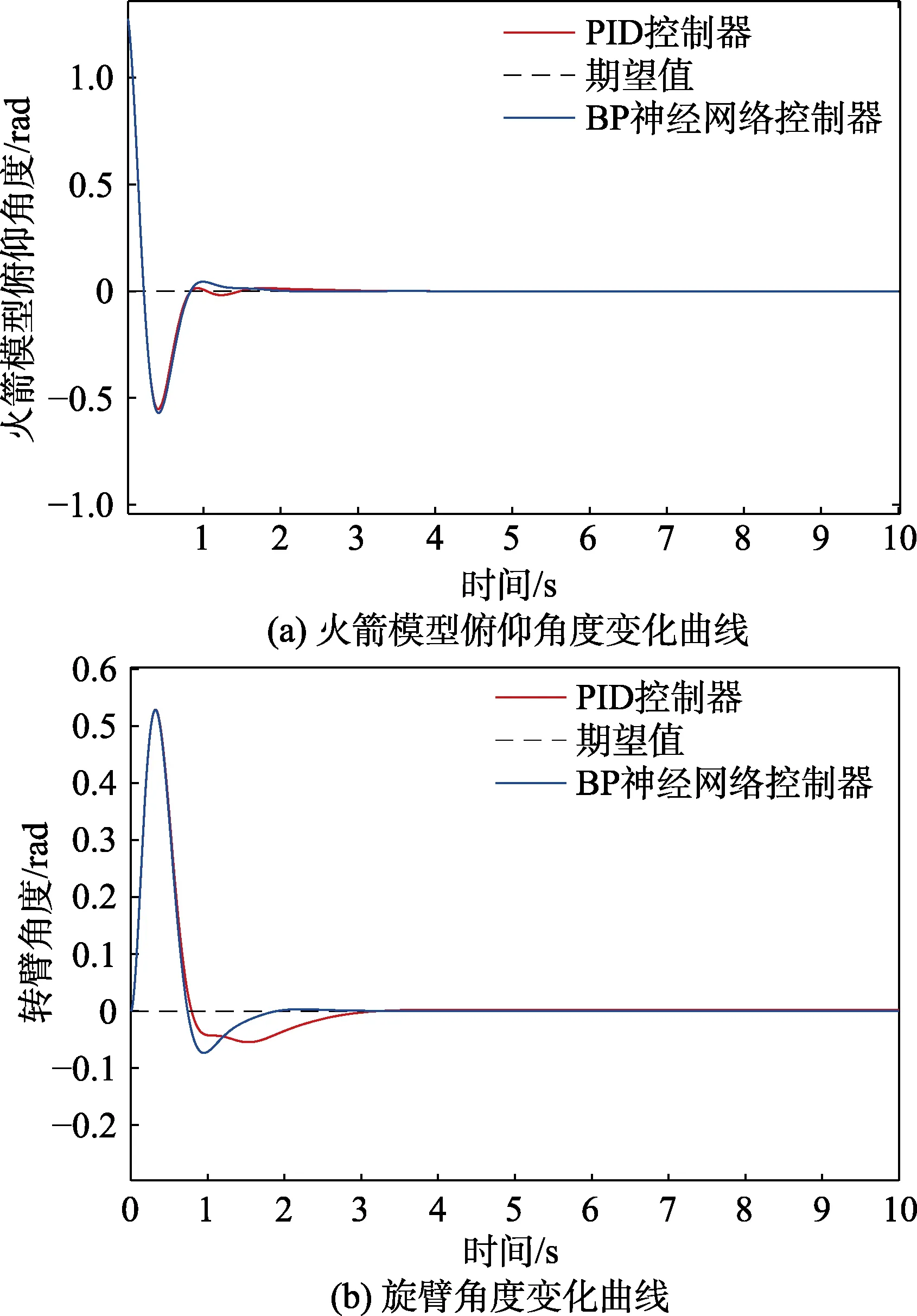
圖5 兩種控制仿真效果圖
從圖5(b)可以看出:使用PID控制器,轉臂角度最大超調量為0.52 rad(約為29.87°),最終穩定時間約為3.1 s;使用BP神經網絡控制器,轉臂角度最大超調量為0.53 rad(約為30.22°),最終穩定時間約為
2.18 s。
對比兩種控制器的仿真效果圖,由于神經網絡具有良好的動態特性,其控制效果在逼近PID控制器效果的同時,狀態參數的穩定時間明顯縮短,優化了傳統控制器的性能。
4 實物平臺驗證
平臺實物按照節1的3-D模型圖進行搭建,如圖6所示。控制系統在 Arduino軟件開發環境中編寫。平臺控制程序總體流程圖如圖7所示。
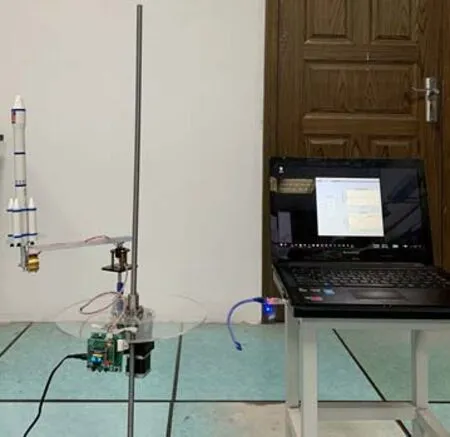
圖6 演示平臺實物
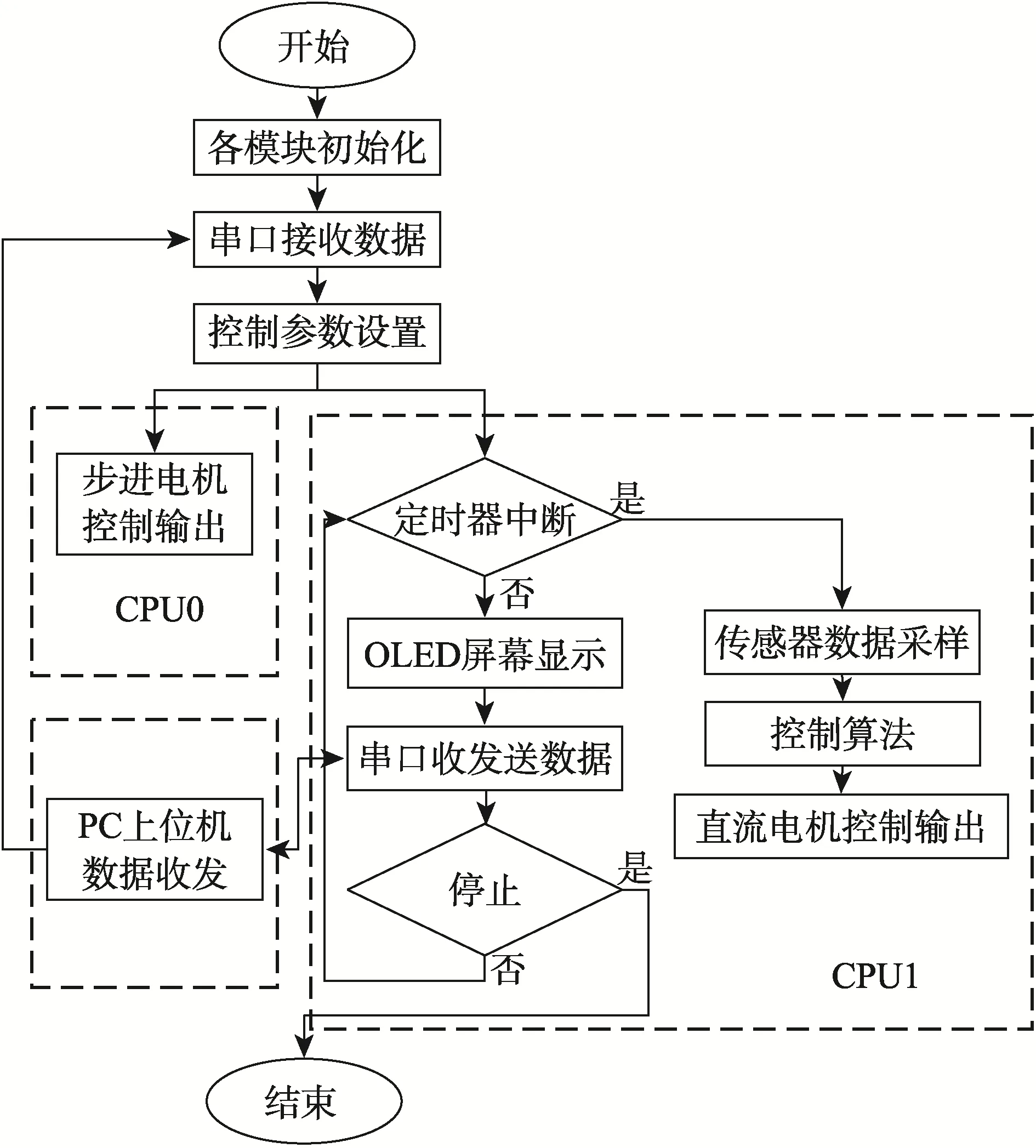
圖7 平臺控制程序總體流程圖
首先對單片機所用到的I/O口、內部中斷、串口、ADC數模轉換等模塊進行初始化,之后通過串口等待接收 PC上位機的調整參數指令以及平臺啟動指令,并根據指令設置控制參數。在CPU0程序中,主要實現步進電機的驅動控制,并可通過 PC上位機改變平臺上升速度;CPU1程序中,進入主程序后,驅動OLED顯示,進行串口收發數據,根據flag變量值確定控制算法類型,并確定控制參數。平臺每5 ms會進入中斷程序,對傳感器數據進行采樣;每25 ms根據已設定好控制參數的控制算法對模型輸出控制量,通過PWM信號驅動直流電機實現穩定控制。最終由 PC上位機關閉平臺。兩種控制算法根據仿真模型的控制器結構和公式進行編寫,控制參數在仿真整定的基礎上,根據實物控制效果進行調整,達到最優[13]。
控制系統外接無線 Wi-Fi模塊,在 PC上位機上安裝與其配對的無線Wi-Fi模塊,可通過串口實現數據實時傳輸,相比傳統的數據線傳輸,無線模塊傳輸可以不受線長的約束,更加靈活便捷;同時可以實現局域網傳輸,控制系統的數據可以傳輸到局域網內的PC上位機上,方便課程教學與實驗。在PC上位機上,利用MATLAB平臺上的GUI軟件制作了上位機程序,具備五項功能,分別為串口配置功能、數據收發功能、控制算法選定功能、控制參數設置功能和曲線繪制功能,便于學生進行實驗對比與結果分析。
圖8和9分別為兩種控制器對實物平臺的控制效果圖。可以看出,與仿真結果類似,兩種控制器都能較快使火箭模型穩定在豎直狀態并隨平臺加速上升,很好地驗證了控制算法的可行性,達到了設計預期效果。
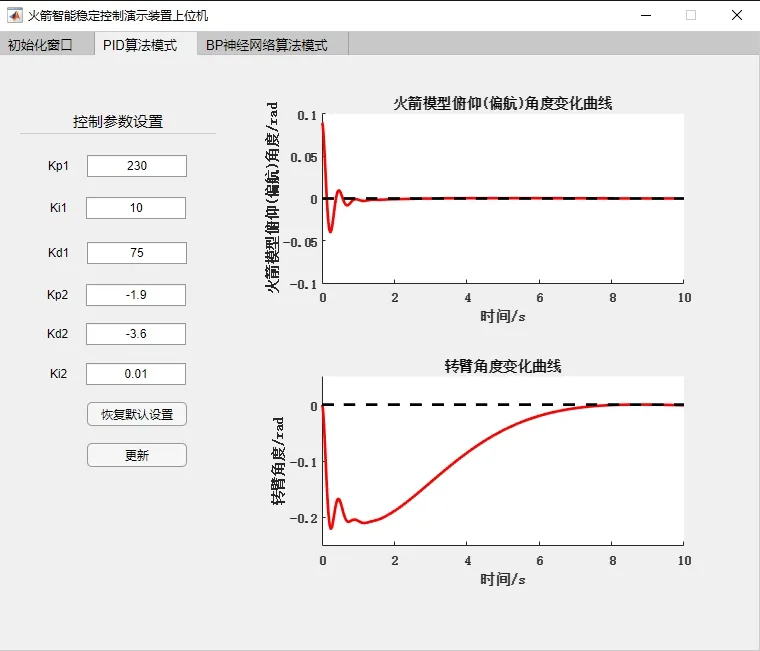
圖8 PID控制器對平臺的控制效果
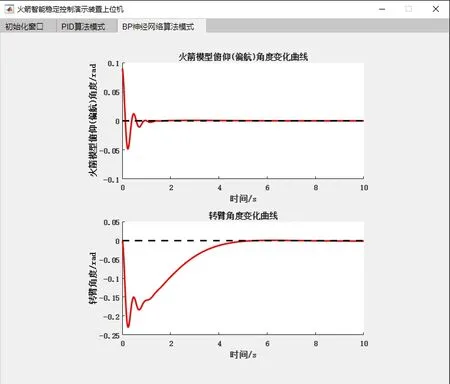
圖9 BP神經網絡控制器對平臺的控制效果
5 結語
本文針對“航天器控制技術與應用”專業控制課程,在傳統的倒立擺基礎上進行機械結構的改進,搭建了火箭智能穩定控制演示平臺,分別運用PID控制算法和 BP神經網絡控制算法實現數學模型仿真以及實物控制,同時平臺配套設計了 PC上位機程序,實現對演示平臺的控制以及實時獲取火箭模型狀態變化曲線。將該演示平臺應用于本科實驗教學,能以實物的形式向學生直觀地展示運載火箭姿態控制過程,使學生對抽象復雜的火箭姿態控制原理有更深入的理解;同時通過采用不同的控制算法,對比分析傳統算法和智能算法的優缺點,滿足了理論與實際相結合的課程教學要求,充分調動了學生對課程的學習興趣,有助于引導學生進行探究實驗與創新實踐,為培養具備扎實專業技能的創新型人才打下堅實基礎。
參考文獻 (Reference)
[1] 豐曉霞,夏廣慶,韓秀利,等. 運載火箭姿態控制系統穩定性分析[J]. 大連理工大學學報,2015(5): 542-547.
[2] 王曉東. 導彈和運載火箭姿態穩定與控制技術發展的回顧和展望[J]. 導彈與航天運載技術,2003(3): 25-30.
[3] 鄧朝結. 基于 2-dof機械臂的平面倒立擺的建模與分析[J].現代企業教育,2009(22): 76-77.
[4] YUAN S Q, ZHANG S S. Inverted pendulum teaching experiment platform based on MATLAB-DSP[C]//Proceedings of 2013 International Conference on Education Technology and Information System (ICETIS 2013). Paris, France: Atlantis Press, 2013: 769-772
[5] 李東,陳強,孫振國,等. 倒立擺教學實驗系統的設計與應用[J]. 實驗技術與管理,2006(9): 100-102, 106.
[6] LUO Z, ZHAO S X, SHI Z Y, et al. Inverted pendulum system control based on state observer and experimental investigation[J].Journal of Northeastern University, 2010, 31(1): 107-110.
[7] 劉繼光,王麗軍,袁浩. 自立倒立擺系統的自擺起及穩定控制[J]. 實驗技術與管理,2015, 32(11): 62-65, 72.
[8] ATMAJA B K, JOELIANTO E. Surface control design of rocket using MIMO PID robust integral backstepping[C]//2011 2nd International Conference on Instrumentation Control and Automation (ICA 2011). Bandung, Indonesisa: IEEE, 2011:370-377.
[9] DOKUMACI K, AYDEMIR M T, SALAMCI M U. Modeling,PID control and simulation of a rocket launcher system[C]//2014 16th International Power Electronics and Motion Control Conference and Exposition. Antalya, Turkey: IEEE, 2014:1283-1288.
[10] 張秀艷,陶國彬,劉慶強. 基于 Simulink的 BP神經網絡實現研究[J]. 佳木斯大學學報(自然科學版),2007(5):587-589.
[11] ZHOU J, ZHOU C S, CHEN X. GA-BP neural network control for ducted rocket gas regulating system [J]. Computer Simulation, 2015, 32(1): 56-59, 201.
[12] 周開利. 神經網絡模型及其 MATLAB仿真程序設計[M]. 北京: 清華大學出版社,2005.
[13] 倪天龍. 人工神經網絡在 ARM 平臺上的應用[J]. 單片機與嵌入式系統應用,2005(5): 15-17, 21.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
