輕小型低空無(wú)人機(jī)航測(cè)航高計(jì)算方法研究
2020-09-29 06:54:50馬小輝張艷超伍增強(qiáng)薛志強(qiáng)
科學(xué)技術(shù)創(chuàng)新 2020年29期
馬小輝 張艷超 伍增強(qiáng) 薛志強(qiáng)
(1、陜西彬長(zhǎng)孟村礦業(yè)有限公司,陜西 咸陽(yáng)713600 2、陜西天潤(rùn)科技股份有限公司,陜西 西安710054)
航空攝影測(cè)量從飛機(jī)飛行高度上可以分為高、中、低三種攝影測(cè)量方式,高空攝影測(cè)量主要采用運(yùn)輸機(jī)搭載航攝儀的方式進(jìn)行,由于大型運(yùn)輸機(jī)限制較多,不利于成本控制,中低輕型飛行器價(jià)格的下降、無(wú)人航空器的發(fā)展等,使中低空航空攝影測(cè)量發(fā)展迅速[1-2]。中低空無(wú)人機(jī)航測(cè)主要采用固定翼或者旋翼無(wú)人機(jī)搭載航測(cè)相機(jī)的方式,具有機(jī)動(dòng)靈活、高效快速、作業(yè)成本低、生產(chǎn)周期短等優(yōu)點(diǎn),迅速成為傳統(tǒng)航測(cè)的有力補(bǔ)充[2]。近年來,輕小型低空無(wú)人機(jī)已廣泛應(yīng)用于地形圖測(cè)繪[3]、庫(kù)區(qū)范圍劃界[4]、公路測(cè)量[5]、農(nóng)村土地經(jīng)營(yíng)承包權(quán)確權(quán)[6]、公路斷面測(cè)量[7]、土方平衡[8]等多個(gè)方面。輕小型低空無(wú)人機(jī)得到廣泛應(yīng)用的同時(shí),由于低空無(wú)人機(jī)體型小、載重小、相機(jī)性能較低等原因,容易造成測(cè)圖成果質(zhì)量差、精度低等問題。為了滿足大比例尺成圖的要求,使航測(cè)成果分辨率高、精度符合要求,測(cè)區(qū)飛行時(shí)應(yīng)盡可能降低飛行高度,以此保證地面分辨率能夠滿足大比例尺成圖的需要。但是在飛行高度過低時(shí),能夠滿足精度要求,但造成飛行工作量大、數(shù)據(jù)量大、處理困難、效率低等問題。因此在實(shí)際項(xiàng)目中應(yīng)根據(jù)成圖需要,設(shè)置合適的飛行高度,才能在保證相片質(zhì)量,并滿足成圖要求的情況下,減少飛行工作量、減少數(shù)據(jù)量、提高數(shù)據(jù)處理效率。該文介紹了成圖比例尺、地面分辨率、飛行高度、相機(jī)參數(shù)之間的關(guān)系,提供一種無(wú)人機(jī)飛行高度計(jì)算方法,根據(jù)成圖比例尺,計(jì)算最低飛行高度與最大飛行高度,保證成果滿足要求。
1 基本理論
1.1 攝影基本原理
攝影主要是采用相機(jī)對(duì)目標(biāo)景物進(jìn)行保存,目前航測(cè)采用的主要是數(shù)碼相機(jī)。數(shù)碼相機(jī)由鏡頭、取景器、CCD、液晶顯示屏、快門等組成,在航空攝影測(cè)量中一般使用定焦鏡頭,固定鏡頭的焦距。取景器用來取景,CCD 是電子成像元件,其面積大小決定像素的大小。數(shù)碼相機(jī)采用凸透鏡成像原理進(jìn)行拍攝與成像,凸透鏡成像原理中設(shè)計(jì)光心、焦點(diǎn)、焦平面、焦距、像距、物距等概念,如圖1 所示。
圖中,AB 表示拍攝的實(shí)物,A1B1 表示實(shí)物經(jīng)過凸透鏡都在相機(jī)中形成的倒立像,O 是凸透鏡的光心,即凸透鏡的中心,F(xiàn)是凸透鏡的焦點(diǎn),f 表示焦距,即物鏡后主點(diǎn)至焦點(diǎn)之間的距離,F(xiàn) 表示像距,即像平面鏡到像之間的距離,H 表示物距,即物體到像平面鏡之間的距離。
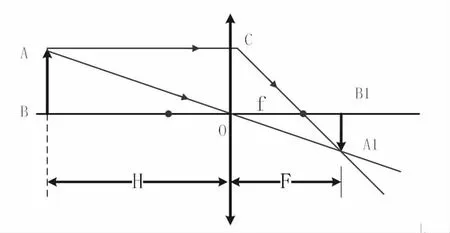
圖1 凸透鏡成像原理
根據(jù)上圖采用相似三角形的方法可以推導(dǎo)出光學(xué)中最基本的高斯成像公式:

式中:f:相機(jī)焦距;
F:表示相機(jī)像距(主距);
H:表示物距。
根據(jù)上圖中相似三角形可以得到:

式中:AB:表示物體大小;
A1B1:表示物像大小。
1.2 像片質(zhì)量因素
像片的質(zhì)量即像片的清晰度,主要由像片單位面積內(nèi)的像素?cái)?shù)目決定。像素是數(shù)碼相機(jī)感光器件(CCD 或COMS)上的最小感光單位,像素?cái)?shù)指一張相片的總的像素?cái)?shù)目,如5472×3648 像片的像素?cái)?shù)目約為2000 萬(wàn),通常稱為分辨率。像片的清晰度不僅取決于像素?cái)?shù)的多少,更取決于單位面積上的像素?cái)?shù)。一般相機(jī)感光器件的尺寸是一定的,如35mm 全畫幅相機(jī)感應(yīng)器尺寸為36mm×24mm、佳能APS-H 相機(jī)感應(yīng)器尺寸為27.9mm×18.6mm,各類型號(hào)相機(jī)的感應(yīng)器尺寸可在相機(jī)說明書中查找。相同感光器件的相機(jī),分辨率越高(像素?cái)?shù)目越多),圖像清晰度越高,越細(xì)膩。
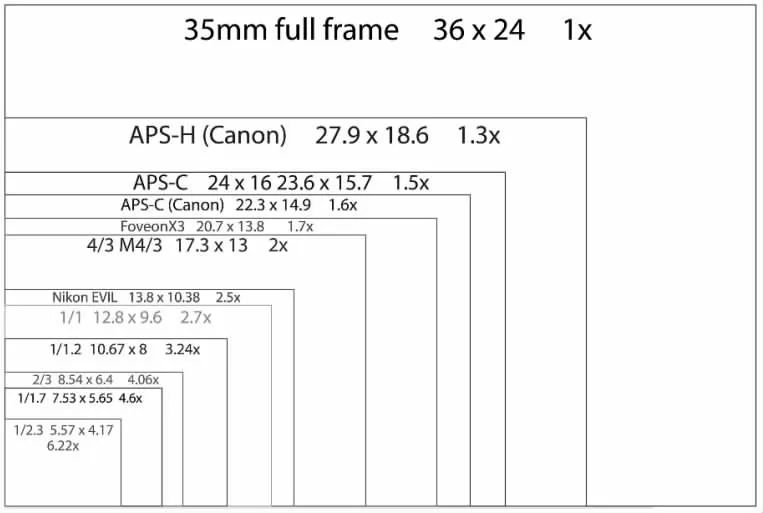
圖2 部分相機(jī)感光器件尺寸

其中:a:?jiǎn)蝹€(gè)像素尺寸;
L:感應(yīng)器尺寸(邊長(zhǎng));
N:影像像素?cái)?shù)(單邊)
大疆精靈4P 無(wú)人機(jī)攜帶相機(jī)型號(hào)為FC6310,該相機(jī)感光器尺寸為1 英寸(在相機(jī)行業(yè)1 英寸CMOS 的對(duì)角線長(zhǎng)度為16mm,而不是25.4mm[9]),即12.8mm×9.6mm。該相機(jī)的像素?cái)?shù)為5472×3648,因此每個(gè)像素的實(shí)際尺寸為2.34um。
1.3 航測(cè)基本原理
無(wú)人機(jī)航測(cè)系統(tǒng)主要由硬件系統(tǒng)和軟件系統(tǒng)組成,硬件系統(tǒng)包括無(wú)人機(jī)飛行平臺(tái)(飛行器、GPS、慣導(dǎo)、指南針、氣壓計(jì)等)、數(shù)碼相機(jī)、地面控制系統(tǒng);軟件系統(tǒng)包括地面控制系統(tǒng)、傳感器系統(tǒng)、飛行控制系統(tǒng)、以及數(shù)據(jù)后處理系統(tǒng)[2]。無(wú)人機(jī)航測(cè)采用無(wú)人機(jī)搭載數(shù)碼相機(jī)進(jìn)行空中拍攝、獲取地面影像,然后采用空中三角測(cè)量的方式對(duì)像片進(jìn)行加密計(jì)算,最后進(jìn)行DOM、DSM、DEM、DLG 等數(shù)字產(chǎn)品的制作。
輕小型低空無(wú)人機(jī)由于自身載重小、慣性小、易受氣流影響、俯仰角、翻滾角和旋片角變化快,在飛行過程中容易造成像片清晰度低、像片重疊度不均勻、航帶排列不整齊等問題。因此,在飛行時(shí)盡可能選擇合適的飛行高度,適當(dāng)增加重疊度,以提高像片的地面分辨率,進(jìn)而滿足數(shù)字產(chǎn)品的成圖比例尺。在無(wú)人機(jī)飛行時(shí)飛行高度越低地面分辨率越高,地面分辨率越高,圖像越清晰,測(cè)量精度越高[2],無(wú)人機(jī)航測(cè)飛行高度與影像地面分辨率關(guān)系如公式(4)所示。在實(shí)際低空無(wú)人機(jī)航測(cè)項(xiàng)目中,由于飛行時(shí)間、飛行成本、數(shù)據(jù)處理效率等方面因素影響,不可能無(wú)限制的降低飛行高度,提高影像地面分辨率。需要綜合考慮成本和效益,在滿足成圖比例尺要求,盡可能高的進(jìn)行航空測(cè)量,如此縮短飛行時(shí)間、減少數(shù)據(jù)量、提高數(shù)據(jù)處理效率,進(jìn)而降低項(xiàng)目生產(chǎn)成本。

F:數(shù)碼相機(jī)主距;
H:無(wú)人機(jī)飛行相對(duì)高度;
a:像片像素尺寸;
GSD:影像地面分辨率。
2 相對(duì)航高計(jì)算
在低空無(wú)人機(jī)航測(cè)時(shí),由于無(wú)人機(jī)飛行航高與航測(cè)相機(jī)主距和焦距之間數(shù)值相差較大,相差多個(gè)數(shù)量級(jí),因此由公式(1)可以認(rèn)為航測(cè)相機(jī)主距與焦距相同,即

由公式(3)、(4)、(5)合并整理得:
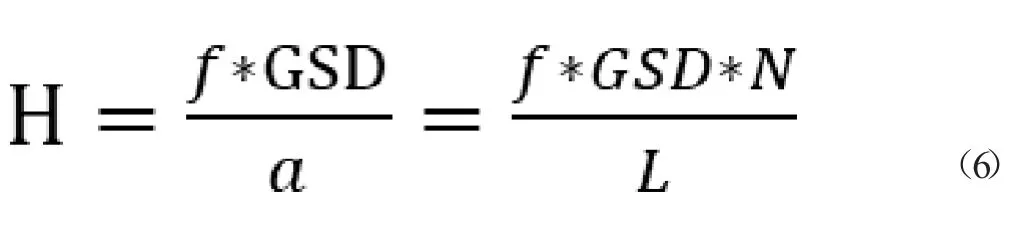
式中:f:表示航測(cè)相機(jī)焦距;
GSD:表示影響地面分辨率;
N:表示影像像素?cái)?shù)(長(zhǎng)邊或短邊);
L:表示相機(jī)感光器件尺寸(長(zhǎng)邊或短邊)。
航空攝影分為傳統(tǒng)的高空航空攝影和無(wú)人機(jī)低空航空攝影,本文主要探討輕小型低空無(wú)人機(jī)航測(cè)過程中相對(duì)航高的計(jì)算。低空無(wú)人機(jī)航測(cè)的成圖比例尺主要為大比例尺,包括1:200、1:500、1:1000 等大比例尺地形圖,根據(jù)相關(guān)規(guī)范要求[9-11],低空無(wú)人機(jī)航測(cè)地面精度要求如表1 所示,以大疆精靈4P 無(wú)人機(jī)、SONY(型號(hào):ZRZK-X1)為例,相對(duì)不同比例尺飛行航高對(duì)應(yīng)如表1 所示。

表1 數(shù)碼相機(jī)航測(cè)成圖比例尺無(wú)地面分辨率關(guān)系
3 測(cè)區(qū)實(shí)驗(yàn)
3.1 概況與技術(shù)方案
本實(shí)驗(yàn)測(cè)區(qū)位于西安市神州大道與京東大道交口,地表主要覆蓋物為城中村拆遷建筑垃圾,測(cè)區(qū)面積約為335 畝。采用無(wú)人機(jī)航飛,地面布設(shè)像控點(diǎn),航飛完成后進(jìn)行空三計(jì)算,三維模型構(gòu)建,采用RTK 實(shí)測(cè)點(diǎn)與三維模型采集點(diǎn)進(jìn)行對(duì)比的方案進(jìn)行精度驗(yàn)證,證明該飛行高度是否滿足相應(yīng)比例尺測(cè)圖要求,技術(shù)流程如圖3 所示。
本次實(shí)驗(yàn)要求成圖比例尺為1:500,地面分辨率為8-10cm,航測(cè)飛機(jī)采用大疆精靈4P,相機(jī)為FC6310,焦距為9mm,感光器尺寸為12.8mm×9.6mm,像素?cái)?shù)為5472×3648,根據(jù)公式(6)計(jì)算可得飛行高度最高為190m,為保證測(cè)圖質(zhì)量本次分型高度為110m,成圖地面分辨率理論約為3cm。
3.2 成果檢測(cè)
本次實(shí)驗(yàn)在測(cè)區(qū)內(nèi)提取若干個(gè)數(shù)據(jù)點(diǎn)進(jìn)行精度驗(yàn)證,實(shí)驗(yàn)點(diǎn)均勻分布在測(cè)區(qū)內(nèi),結(jié)果對(duì)比如表2 所示,通過模型采集坐標(biāo)與實(shí)測(cè)坐標(biāo)進(jìn)行對(duì)比分析,得到采集坐標(biāo)與實(shí)測(cè)坐標(biāo)誤差均在3cm 左右,說明設(shè)計(jì)航高與計(jì)算地面分辨率基本吻合。
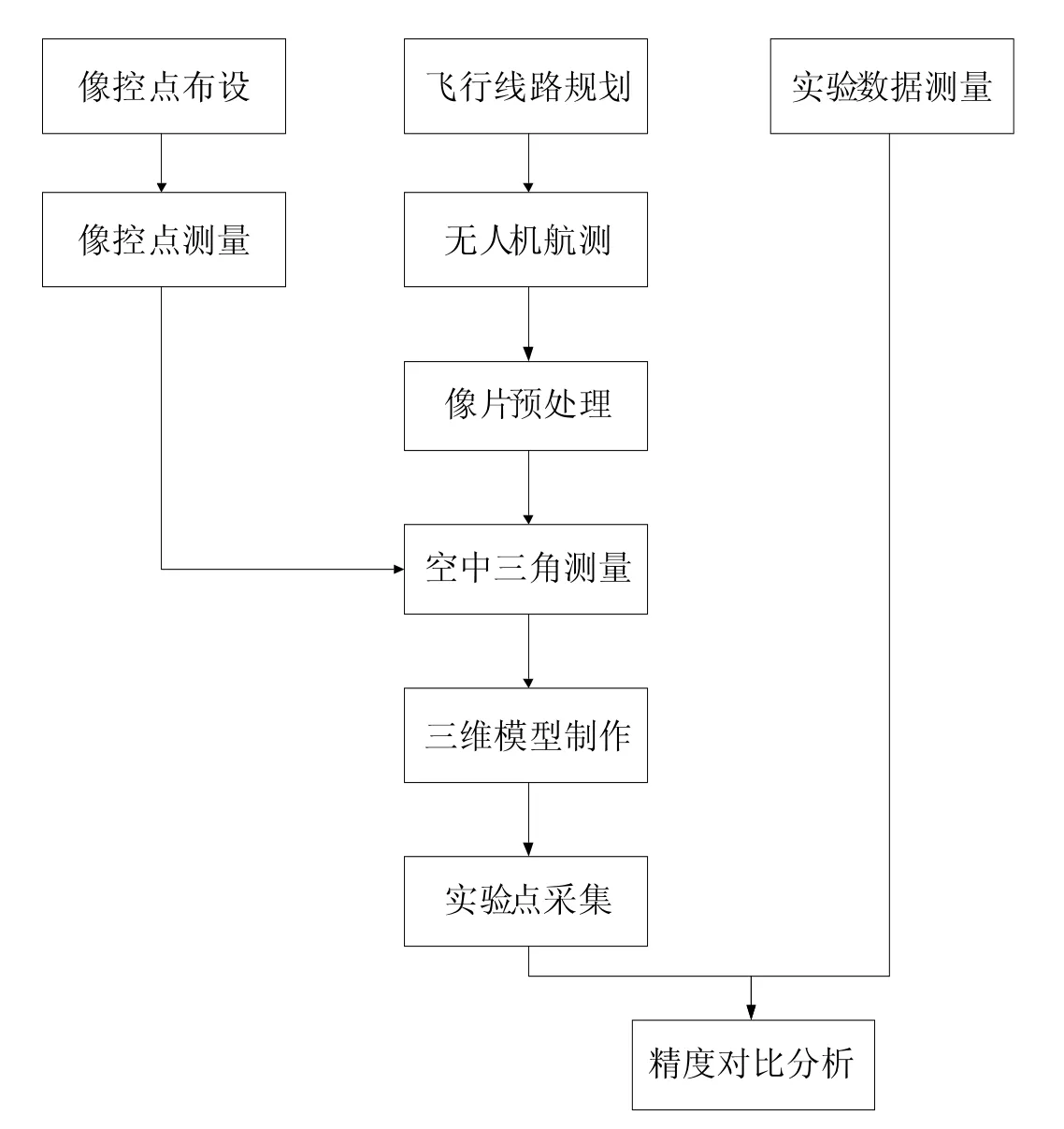
圖3 實(shí)驗(yàn)技術(shù)路線圖
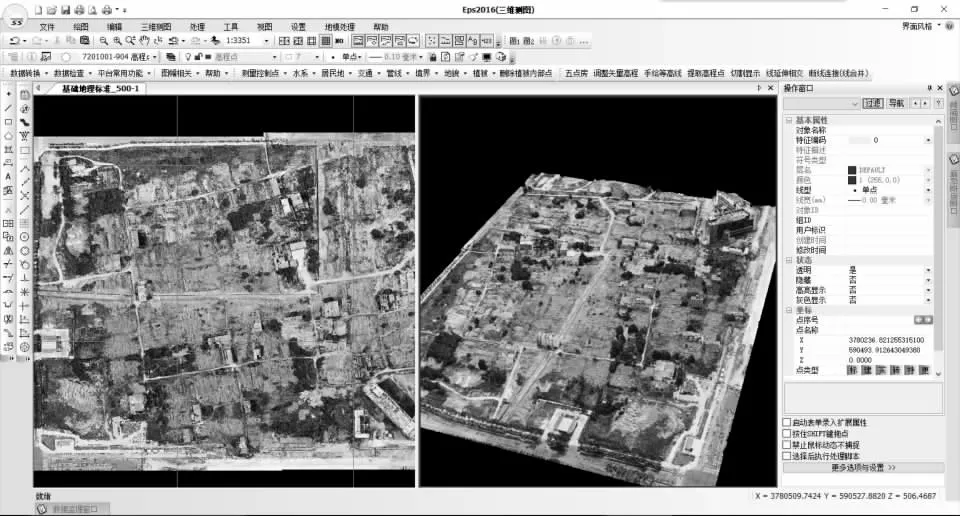
圖4 基于測(cè)區(qū)三維模型進(jìn)行數(shù)據(jù)采集
結(jié)束語(yǔ)
通過對(duì)相機(jī)原理、凸透鏡成像原理、航測(cè)過程、地面分辨率等進(jìn)行綜合分析,確定無(wú)人機(jī)飛行時(shí)航高的計(jì)算方法,解決了實(shí)際航飛過程中,無(wú)人機(jī)飛行高度控制的問題。當(dāng)無(wú)人機(jī)飛行較低時(shí),拍攝像片的分辨率越高、清晰度越高、地面分辨率越高,同時(shí)內(nèi)業(yè)處理的數(shù)據(jù)量越大、處理越復(fù)雜、越耗時(shí);當(dāng)飛行高度過高時(shí),影像的清晰度下降、地面分辨率低,無(wú)法滿足任務(wù)需求以及成圖所需的地面分辨率。在實(shí)際項(xiàng)目中要根據(jù)任務(wù)目的、成圖比例尺等,查找規(guī)范獲取所需航測(cè)的地面分辨率,然后根據(jù)地面分辨率計(jì)算航飛高度,最后根據(jù)實(shí)際情況確定合適的飛行高度,完成任務(wù)需求。