智能制造與機器人焊接技術的集成與應用
2020-09-21 08:38:21任萱
科技創新導報 2020年18期
關鍵詞:智能化
任萱
摘? ?要:焊接機器人技術缺少“柔性”,需要根據實際數據以及實際作業的要求來提前設置焊接需要進行的路徑和焊接中重要的參數,這往往在焊接工作中留下比較明顯的缺點。像常見的點焊、弧焊等這些常見的機械示教式流程,主要為通過穩定的編程程序,使焊接電源需要的參數以及焊接機器人所用的焊槍中心點位的位姿行走、軌跡達到一個穩定可控的狀態。在近年來人工智能技術、工業控制技術和網絡通信技術不斷發展的前提下,現在的單一示教再現型焊接機器人正在像智能化、多傳感的智能化柔性加工單元體系為發展方向。現在主要講解焊接機器人通過智能化焊接工作平臺的系統實際應用和關鍵組成部分。通過設計較為先進的智能焊接系統,解決在柔性生產當中機器人的問題以及控制系統與其他組成系統諸如通信、快速裝夾工件和焊縫跟蹤等技術上的難題。
關鍵詞:智能化? 機器人集成? 焊接工作平臺
中圖分類號:F426.6? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2020)06(c)-0084-02
在焊接機器人的前景當中,出現了之前從未出現的機遇,就是在技術不斷發展的同時,焊接機器人的售價卻是在下降,性價比的提升成為了顯而易見的事情;除此之外,現在階段的勞動力成本處于一個不斷上升的狀態,我國邁出了由工業制造大國向工業制造強國的腳步。在這個過程當中,需要提升我國的產品質量、讓產業的加工手段得到提高,以此來增加我國企業的國際競爭力,這些現象都可表明在焊接機器人產業還有很大的發展前景以及發展空間。
現在的高新型應用技術包含機械設計、焊接工藝、識別以及傳感技術、信息采集、自動控制和處理多種學科形成的新型應用技術,其主要目的是解決焊接工藝作為主體的自動化設備能否在滿足工業制造中的焊接需求,在檢測和控制質量時以自動化、智能化和信息化作為評定的基礎標準。
1? 焊接機器人的發展方向以及分類
在現階段,焊接機器人的基礎應用模塊以及趨于成熟,類型豐富多樣,主要包括電焊機器人、摩擦焊接機器人、弧焊機器人和激光焊接機器人在內的多種類型。
而焊接機器人的發展方向大致如下。
1.1 焊接機器人的本體結構
機器人的本體結構是一個精細的工作流程,對于定位的精準要求以及動作的靈活度要求都非常高,正因如此,使得機器人成為關鍵時刻執行機構的重要發展方向是輕便巧妙,而模塊化和可重構的也同樣成為了本體結構將來的發展方向。
1.2 智能傳感技術
環境可以對焊接過程造成較大的影響,工作本身也會因為這個因素而發生變形,為了改變被稱為“盲人式”焊接的一代示教焊接編程,需要我們對焊接未來的發展方向注入更有效更多彩的感覺,除了視覺傳感器之外,還可以額外的添加聲覺、觸覺、力覺等其他多方面的傳感設備,增加其對于周遭環境的感知能力,當這些設備在機器人系統中運行時,可以 確保機器人焊接的過程可以實現自動把控和精準定位。
1.3 網絡通信技術
機器人焊接從原來孤立的一方面在企業自動化和信息化的浪潮當中迅速融入,被添加到數字化工廠的名錄當中。不但如此,今后還會增加機器人多智能化群體體系的構建、相互磋商機理以及通信以及學習方法和感知、模型構建與規劃、控制群體行為以及其他相關方面的研究。
1.4 VR技術
VR就是虛擬現實技術,將仿真、預演和發展添加到機器人應用的控制過程中,讓操作者可以通過遠程操縱來完成對機器人的操縱,依賴多元傳感器、虛擬現實技術和臨場技術來完成機器人的虛擬操縱,實現人機交互的過程。
2? 典型機器人焊接系統
機器人、工裝夾具和焊接裝備等內容構成了機器人焊接的基本系統,在技術角度來分析,焊接體系主要分為“焊接+機器人”“焊接工作站+機器人”“焊接生產線+機器人”三個體系。
3? 智能焊接技術的集成應用
3.1 智能焊接站系統的主要應用
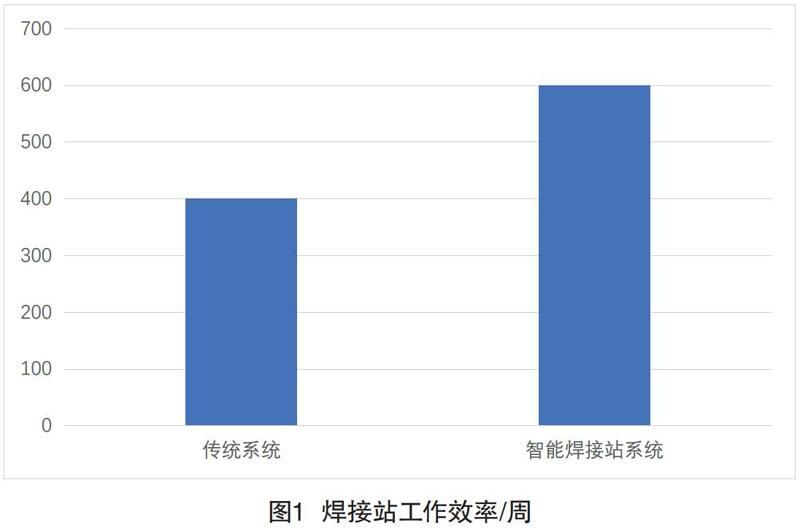
智能焊接站的主要構成組件是機器人系統、焊接電源系統、控制系統、焊槍防撞傳感器、機器人移動軌道、安全系統、清槍站、變位機和工裝夾具以及排煙除塵系統。在焊接工作站中采用兩工位這種設計和液壓/氣動焊接夾具的多是弧焊機器人,這種工作方式可以實現操作者與機器人焊接交替工作,可以在最大程度上減少焊接機器人的待機時間,最大化提高生產效率。在一周內,傳統系統可以處理400個工件,而智能焊接系統則可以處理600個工件,極大地提高了工作的效率。如圖1所示。
對于其中具體的構建如下所述:
(1)機器人系統:這種專用的1660ID弧焊機器人多采用ABB,除此之外還配備有TBI的水冷焊槍,這種焊槍上往往自帶傳感器來檢測發生的碰撞情況,可以在更大程度上保護移動或焊接過程中的焊槍。
(2)焊接電源系統:這種智能站點所采用的電源系統為美國林肯的全數字化焊機R500,這套焊接技術具有比較完善的焊接工藝,可以滿足客戶在工件不同時的不同的焊接需求。
(3)控制系統:德國西門子旗下的PLC是控制系統的主要元件,這套系統可以構建通信網絡,將各個電子元件連接在一起,保證整個系統可以有效穩定的運行,實現自動化的進程,并且可以對相關的生產參數進行監測。
(4)變位機與夾具:作為系統中的主要執行中樞機構,需要有工裝夾具安裝在變位機上,可以快速定位到工作元件當中,其中有通過電機驅動的旋轉軸作為變位機身,以此來達到精確控制旋轉角度的任務。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年13期)2021-07-28 07:14:34
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國儲運(2019年5期)2019-05-15 09:37:40
能源(2018年10期)2018-12-08 08:02:52
汽車觀察(2018年10期)2018-11-06 07:05:08
中國交通信息化(2017年4期)2017-06-06 07:21:52
中國公路(2017年12期)2017-02-06 03:07:25
