一種太陽能光伏板清掃機器人的設計
2020-09-12 14:04:20侯凡博姬鵬飛張修太王程陽
科技風 2020年23期
關鍵詞:智能
侯凡博 姬鵬飛 張修太 王程陽
摘 要: 針對光伏板表面的積灰情況和清掃特點,設計了一種智能清掃機器人。該清掃機器人以STC51單片機為控制核心,按照清掃工序順序動作,在光伏板表面進行自動清掃和吸塵。經過仿真實驗,該清掃機器人能夠自主完成對光伏組件的智能清潔,滿足光伏電站實際應用需求。
關鍵詞: 光伏板;清掃機器人;智能
1 緒論
隨著傳統不可再生能源的逐漸減少,能源危機問題日益突出。光伏發電作為主要綠色能源之一,越來越多的得到應用,太陽能發電的規模也達到了前所未有的程度。然而在實際使用過程中,空氣中的微小顆粒容易積聚在光伏板表面形成積灰,導致光伏組件發電效率降低,同時也會給光伏企業帶來巨大的經濟損失。因此,太陽能光伏板的清潔成了新的研究課題。
傳統的清潔方式以人工擦拭和清水清洗為主,效率較低且成本較高,而且受到環境和地域限制。近年來,國內外已經研發出了一些用于光伏板清洗的機器人,如以色列開發的機器人Ecoppia E4和日本未來機械公司研制的太陽能電池板清掃機器人,雖然都可以應用于太陽能光伏板的清掃,但是價格昂貴,普及型不高[1]。國內開發的車載式清掃機器人利用滾刷和吸塵系統對光伏組件進行無水清洗,不利于山區或沙漠地區使用。
針對目前存在的問題,本文設計了一種太陽能光伏板清掃機器人。該清掃機器人是一種智能化的光伏電池板清掃裝置,可實現對光伏板表面灰塵自動清掃,功能集成性好、工作效率高,能有效應用于多種光伏發電場所。
2 系統的整體設計
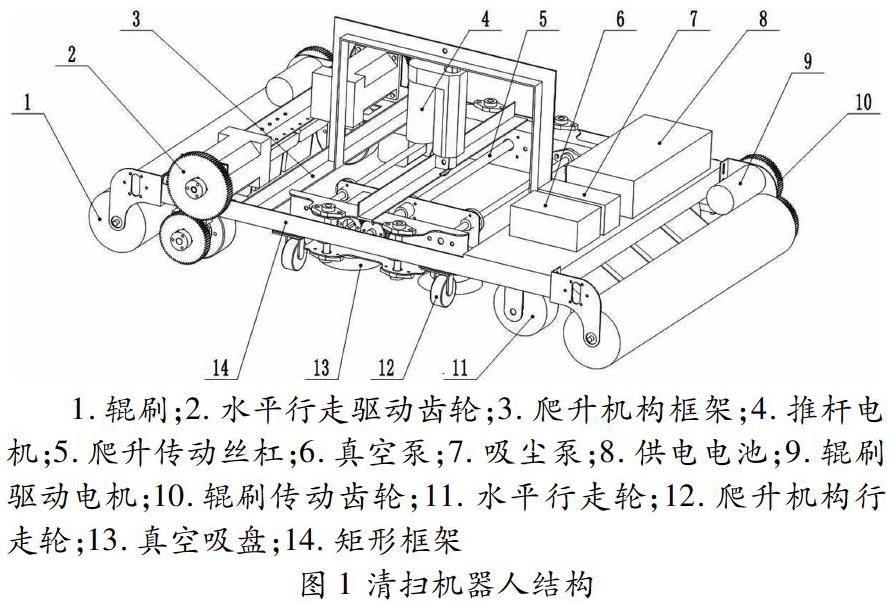
本文設計的清掃機器人結構主要包括:矩形框架、行走機構、爬升機構、清掃機構。矩形框架用于支撐整個機器人的形狀,為各種機構提高安裝位置。其結構示意圖如圖1所示。
具體工作過程是:行走機構帶動清掃機器人在光伏組件上沿水平方向向前行走,行走的同時由清掃機構對光伏板表面進行清掃;當走到光伏組件盡頭時,位置傳感器檢測到光伏組件邊緣,機器人停止前進和清掃,由爬升機構將機器人向上提升一個工位;向上爬行結束后,機器人會朝反方向水平前進,前進的同時光伏板表面進行清掃;當走到光伏組件另一側邊緣時,再次停止前進和清掃,向上爬升一個工位[2]。整個過程可以分為水平行走、清掃和爬升三個部分,整個清掃過程都是這三個部分的循環。整個光伏組件清掃完畢或電量過低時,機器人會回到初始位置。整個工作過程示意圖如圖2所示。
3 清掃機器人控制系統硬件設計
清掃機器人的各項功能需要控制系統的統一協調和調配下才能順利完成。根據清掃機器人所需實現的功能,控制系統的總體結構如圖3所示:
運動控制系統硬件平臺主要有微控制器、步進電機、步進電機驅動電路、傳感器、直流電機、電源等組成。
3.1 控制模塊
選用STC51單片機作為主控芯片,通過單片機的PWM脈寬調制對步進電機進行控制,實現行走、爬升和清掃部分的功能,并利用感知部分的信號作為控制的反饋信號和控制信號。STC51單片機正常工作需要復位電路和晶振電路構成單片機最小系統,如圖4所示。
單片機下載程序時采用內部UART實現串口通信,單片機正常工作時采用藍牙通信與手機端APP進行通信,如圖5所示。
3.2 行走模塊
由2個步進電機和2個步進電機驅動器構成。驅動器接收到單片機的控制指令,驅動步進電機,實現清掃機器人的水平行走,如圖6所示。
3.3 爬升模塊
由1個步進電機、1個步進電機驅動器、1個推桿升降電機、2個吸盤和1個真空泵構成。當需要進行爬升時,推桿升降電機向下運動,將吸盤接觸到光伏板表面的同時,矩形框架被整體提升懸空,隨后真空泵開始抽氣,吸盤會牢牢固定在光伏板表面,爬行步進電機轉動實現清掃機器人的橫向移動,控制電路如圖7、8、9所示。
3.4 清掃模塊
由2個直流電機和一個吸塵泵構成。每個電機帶動一個清掃毛輥,在清掃機器人向前行走時進行光伏表面的清掃,同時吸塵泵開始工作,將灰塵吸進收納裝置。
3.5 感知部分
由接近開關、光電開關、編碼器等構成。單片機通過讀取傳感器、編碼器的狀態和數據,實現清掃機器人在行走和爬升過程中位置的精確控制[3]。
3.6 電源部分
選取24V鋰電池作為整個系統的電源,通過電壓轉換實現5V電壓輸入。
4 清掃機器人控制系統軟件設計
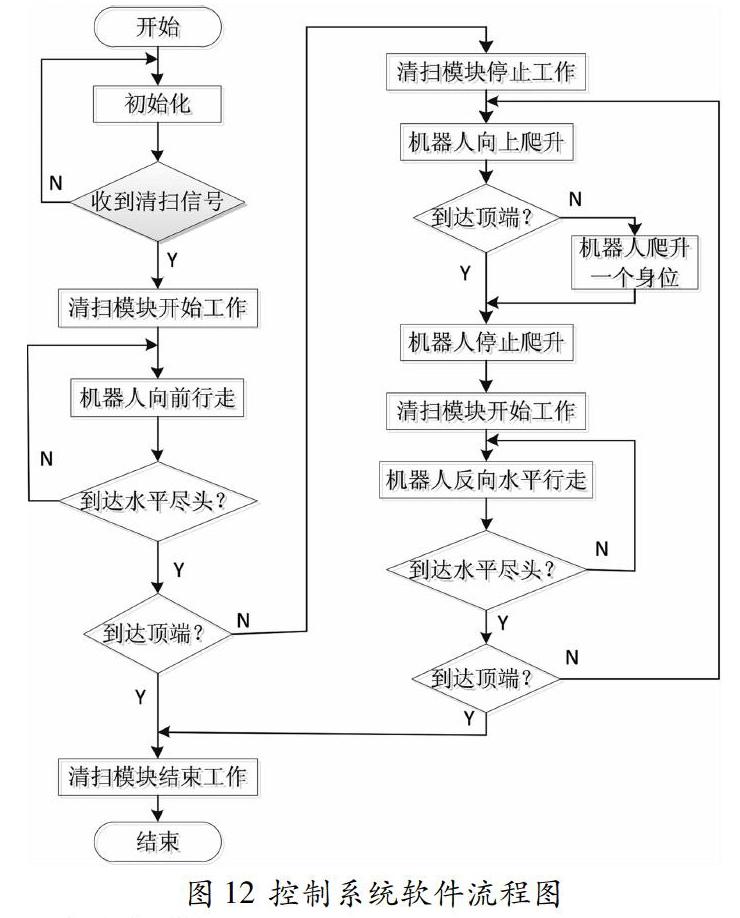
根據清掃工作流程和硬件電路開發控制程序。控制程序系統流程如圖12所示:
5 現場運行分析
為了驗證系統的可行性和合理性,分別在實驗室和學校屋頂光伏陣列進行了運行試驗。現場運行表明,本文所設計的清掃機器人能夠在整個光伏陣列實現自動清掃,清掃范圍能夠覆蓋整個光伏陣列,清掃效果理想。同時,機器人可在晚間工作,會光伏板白天發電影響更小。整體樣機如下:
6 結論
本論文從實際應用出發,研究設計了一種智能清掃機器人,用于對光伏組件表面的積灰進行清掃[4]。該清掃機器人具有自動清掃、爬升、避障、路徑規劃等功能,可完成光伏組件表面自動清掃。仿真及現場實驗運行結果均表明,該清掃機器人清掃效果良好,可有效降低人力成本,提高清掃效率,可應用于大規模光伏電站。
參考文獻:
[1]顧曙光.一種太陽能電池板全天候移動清洗裝置的研制[D].蘇州大學,2015.
[2]于晨.光伏面板清掃機器人關鍵技術研究與設計實現[D].山東大學,2018.
[3]李園,趙熙,汪貴平.光伏電池板智能清潔系統[J].自動化與儀表,2018,33(10):41-44+98.
[4]王軍.光伏組件清掃機器人運動控制系統設計與研究[D].安徽大學,2016.
項目來源: 安陽市科技攻關項目-光伏發電站太陽能電池板清掃機器人(40088902)
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
