基于AMESim與ADAMS的機液伺服聯合仿真設計與應用
2020-09-10 07:22:44劉同偉
內燃機與配件 2020年19期
劉同偉
摘要:電液伺服控制是實現機構高精度運動的關鍵技術,對機構進行仿真研究,是觀測系統靜動態特性、預測故障、設計控制參數等的重要手段。AMESim提供了一套機電液一體化仿真建模與分析的解決方案,主要包括了六大系統模塊。ADAMS提供了多體系統動力學仿真建模與分析的環境,可進行機械結構的約束設置、動力學參數設置、運動與動力加載等。通過接口技術可實現AMESim與ADAMS的聯合,充分發揮各軟件的優勢。建立一種變幅機構聯合仿真模型,采用PID控制方法進行定值角度控制,結果表明聯合仿真接口穩定,可作為機液聯合仿真設計的參考。
Abstract: Electro-hydraulic servo control is the key technology to achieve high-precision movement of mechanism. The simulation of mechanism is an important means to observe the static and dynamic characteristics of the system, predict faults, design control parameters, etc. AMESim provides a set of Mechatronics simulation modeling and analysis solutions, mainly including six system modules. Adams provides an environment for dynamic simulation modeling and analysis of multi-body system, which can be used for constraint setting, dynamic parameter setting, motion and dynamic loading of mechanical structure. The combination of AMESim and Adams can be realized through the interface technology, and the advantages of each software can be brought into full play. A joint simulation model of luffing mechanism is established, and PID control method is used to control the fixed angle. The results show that the joint simulation interface is stable, which can be used as a reference for the joint simulation design of mechanical and hydraulic systems.
關鍵詞:電液伺服控制;聯合仿真;AMESim;ADAMS;PID
Key words: electro hydraulic servo control;co-simulation;AMESim;ADAMS;PID
0 ?引言
機液伺服控制往往使用在對位置、力等控制精度要求較高的場合,如多液壓缸驅動的并聯結構平臺、液壓驅動的機器人等[1,2]。因此,電液伺服控制技術是實現機構進行高精度運動的關鍵技術,其組成通常為檢測裝置、運算單元、伺服閥、伺服缸、激勵信號等。由于電液伺服系統的靜動態特性等往往難以測量,而隨著計算機輔助分析(CAE)技術的發展,采用仿真手段研究電液伺服系統特性是目前流行的方式[3,4]。AMESim提供了較為豐富的機液仿真領域的解決方案,在AMESim中可進行液壓系統建模、液壓泵模型仿真、閥結構建模與仿真、熱仿真、電機仿真、3D機械模型仿真、控制信號產生等。ADAMS是一款多體系統動力學建模與仿真軟件[5,6],借助虛擬樣機技術,在計算機上構造三維可視化機械系統的模型,模擬在現實環境下系統的運動和動力特性,已廣泛應用于汽車制造業、航空航天、國防工業、通用機械制造業等。ADAMS軟件的基本組成模塊主要包括三部分:ADAMS/View、ADAMS/Solver、ADAMS/PostProcessor。
1 ?聯合仿真軟件實現
1.1 AMESim液壓系統仿真
AMESim是一款多學科交叉的系統建模與仿真軟件,軟件組成主要包括:流體系統、電氣系統、電機系統、熱系統、機械系統和信號系統。提供了工程中常見的液壓系統仿真設計平臺,已在多個工業領域得到應用,可實現多種復雜系統的建模和仿真。通過調取元件建立新的部件子模型,實現了對實際機構的建模與優化。
其中,流體系統由多種流體單元組成,如管道、過濾器、液壓缸、液壓泵、閥等。液壓缸包括單作用液壓缸、雙作用液壓缸等,可設置活塞桿直徑、鋼筒直徑、活塞桿行程等參數。液壓泵包括定量泵、變量泵等。閥模塊包括單向閥、三位四通閥、調速閥、梭閥、電液伺服閥等。機械系統模塊由多種機械單元組成,如機架、彈簧、阻尼、摩擦力矩發生器、齒輪、傳感器、3D機械模型等。其中3D機械模型庫將平面機械結構轉為三維機械結構模型。信號系統模塊由多種信號單元組成,包括信號發生器、傳遞函數塊、函數塊、濾波器等。其中,在傳遞函數塊中可建立傳遞函數模型,模型包括一個輸入信號端口和一個輸出信號端口,輸出信號為輸入信號經過傳遞函數模型后的輸出;函數塊與傳遞函數塊類似,可設置一個函數模型;濾波器可設置為低通濾波器、高通濾波器、帶通濾波器等。
AMESim基于圖形編程方式將C或Fortran代碼模型通過圖形化模塊的方式融入AMESim軟件包中,實現了代碼的直接調用。AMESet可用于生成C或Fortran語言代碼。AMESim可與數學和控制軟件MATLAB、MatrixX;多維系統動力學軟件ADAMS、Motion;實時仿真軟件xPC、Dspace;優化設計軟件OPTIMUS、iSIGHT;數據處理軟件Excel 等實現接口連接,大大擴展了仿真研究的功能,同時又能發揮各軟件的優勢。
1.2 ADAMS動力學系統
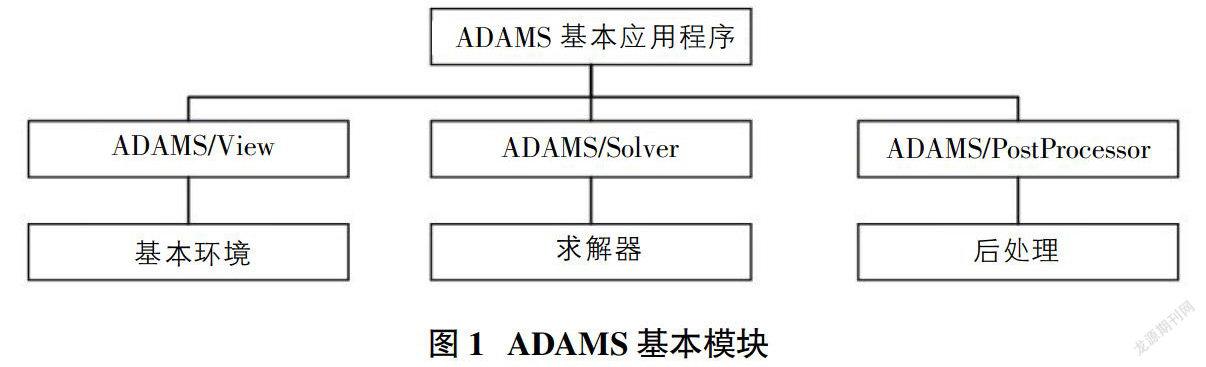
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是由美國MDI公司開發的機械系統動力學建模與仿真分析軟件,主要包括三大模塊,如圖 1所示。
其中,模塊ADAMS/View可建立機械系統的虛擬樣機,支持參數化建模,可實時觀察數據的變化和模型的運動等。ADAMS/Solver可自動建立并解算用于機械系統運動仿真方程,提供了用于解算復雜機械系統運動的數值方法,可對由機械部件、控制系統和柔性部件組成的多域問題進行分析,并支持多種分析類型,包括運動學、靜力學、線性和非線性動力學等。ADAMS/PostProcessor采用可視化圖形界面方式顯示ADAMS仿真結果,可采用不同的方式回放仿真的結果。頁面設置以及數據曲線格式都能保存起來,反復使用,有利于節省時間和整理標準化的格式報告,同時可以方便地顯示和比較多個仿真結果。
2 ?聯合仿真設計
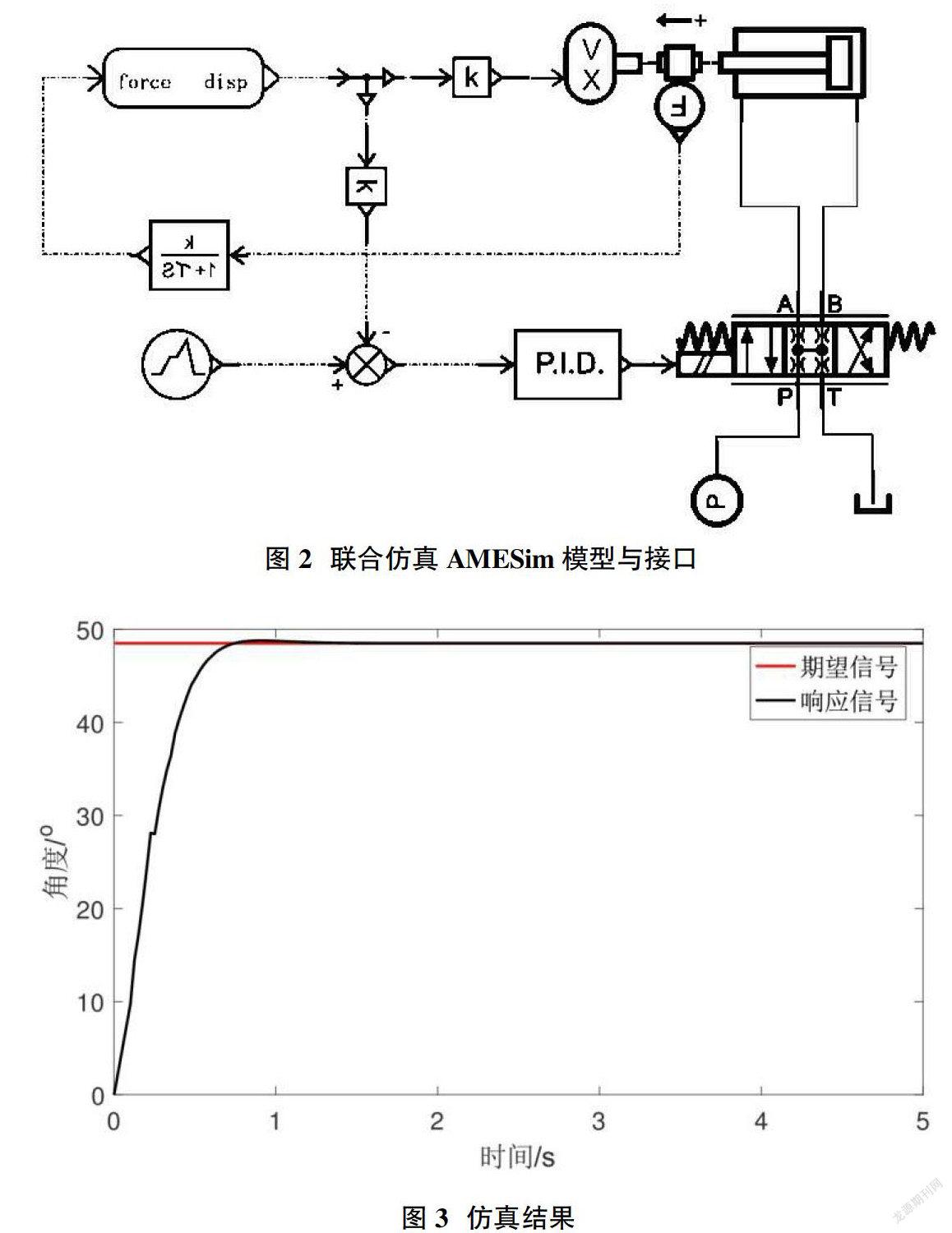
通過AMESim建立某變幅機構的液壓系統仿真模型,通過ADAMS建立機構的動力學分析模型,采用PID控制方式對機構進行控制,如圖2所示,機構的液壓系統模型及聯合接口。
對系統進行定幅度信號激勵,使變幅機構從初始位置移動到指定期望位置,并一直保持下去,仿真結果如圖3所示。結果表明聯合仿真的接口設置是正確的,機構的運動結果符合設計需求,達到了預測機構運動情況、選擇合適的控制參數等的研究目的。
3 ?結束語
電液伺服系統可實現機構的高精度運動控制,進行其機液聯合仿真時研究機構靜動態特性的關鍵技術手段,文中介紹了AMESim液壓系統仿真軟件和ADAMS動力學系統分析軟件,并對某變幅機構進行了聯合仿真建模,對模型進行激勵響應研究,結果表明仿真接口設置正確,達到了預期效果和目的。
參考文獻:
[1]呂安生.抓臂式清污機設計與關鍵技術研究[D].合肥工業大學,2019.
[2]尹方辰,孫杰,馬更生,等.基于ADAMS-MATLAB聯合仿真的液壓活套多變量解耦控制[J].東北大學學報(自然科學版), 2016,37(04):500-503,507.
[3]Zhao, P.-Y., Chen, Y.-L., Zhou, H.Simulation Analysis of Potential Energy Recovery System of Hydraulic Hybrid Excavator[J].International Journal of Precision Engineering and Manufacturing, 2017,18(11): 1575-1589.
[4]Xiao, C., Zhang, G.Dynamic simulation analysis of working device for hydraulic excavator based on ADAMS[J].Telkomnika (Telecommunication Computing Electronics and Control), 2016,14(3A): 194-201.
[5]陳遠龍,呂安生,侯亭波,等.基于AMESim與ADAMS的抓臂式清污機工作裝置聯合仿真研究[J].液壓與氣動, 2020(01): 137-141.
[6]張桂菊,肖才遠,譚青,等.基于虛擬樣機技術挖掘機工作裝置動力學分析及仿真[J].中南大學學報(自然科學版),2014,45(6):1827-1833.