改進ADC法在無人偵察機作戰試驗階段作戰效能評估應用
2020-09-07 04:12:14初欣陽廖學軍許欽羨遲明祎
兵器裝備工程學報 2020年8期
初欣陽,廖學軍,許欽羨,遲明祎
(1.航天工程大學 研究生院, 北京 101416;2. 32116部隊, 吉林 琿春 133300;3.航天工程大學 航天保障系, 北京 102206)
美軍的“全球鷹”和“捕食者”等無人偵察機多次在局部戰爭中發揮關鍵目標偵察作用,說明其作戰效能滿足作戰任務需要并經受住了實戰的考驗,而對無人機最早進行作戰效能考核的節點是在作戰試驗階段。現今判斷武器裝備的價值已不再依據單項性能的優劣,而是其滿足實際作戰需求的程度。在美軍裝備試驗中,前者主要通過研制試驗來回答,而后者則主要通過作戰試驗來回答。
武器裝備作戰效能評估的意義是反映裝備的真實作戰能力,可以為裝備發展決策提供有效的技術支持。針對無人機系統效能評估的研究非常多,文獻[1-2]給出了無人偵察機多種載荷兩兩協同的偵察效能評估方法,為決策者提供最優的偵察載荷協同方案;文獻[3]參考當前無人機系統相關的仿真系統和環境設計了一個本體模型,然后通過對本體模型轉換,建立了基于SMP2的無人機系統效能仿真模型框架評估作戰效能;文獻[4]以ADC模型為基礎,結合產品分解結構(PBS)提出PBS-ADC模型,實現了無人偵察機系統研發階段的效能評估;文獻[5]從生成性能、偵察性能和穩定性等無人偵察機的本身能力出發建立指標體系,并提出了一種基于熵權的組合賦權方法。然而現階段評估方法多是對無人偵察機的固有能力、載荷協同能力等系統效能進行分析,且多是在研發階段、列裝使用階段的偵察效能評估,但是對作戰試驗階段的無人偵察機作戰效能評估缺乏相關研究,作戰試驗是檢驗武器裝備作戰效能的關鍵環節,因此本文選擇這一階段的無人偵察機作戰效能作為研究對象。
1 改進ADC效能評估模型與指標體系
1.1 ADC模型基本原理及改進
傳統ADC模型是通過武器系統的可用性、可信度、能力矩陣三大要素評價武器裝備系統效能,其模型具體表達式為:
E=A·D·C
(1)
式(1)中:A為系統可用性(Availability)矩陣;D為可信度(Dependability)矩陣;C為能力(Capability)矩陣。
根據無人偵察機作戰試驗過程,其作戰效能與人為因素、環境因素存在一定的依賴關系。相對研發階段和列裝應用階段,無人偵察機作戰試驗階段具有如下特點:試驗環境為模擬戰場對抗環境,操作人員為常規作戰人員,在常規保障流程下運用相關戰術、戰法完成試驗任務。ADC模型是基于理想狀態下的理論分析,已經不能全面地反映裝備系統的作戰效能。為確保無人偵察機系統的作戰需求和任務描述映射于系統效能指標的完整性和可測性,以及其作戰效能分析模型評估結果的真實性和客觀性,對傳統ADC模型進行改進,既考慮無人偵察機系統中各個分系統串并聯關系,也包含影響作戰試驗結果的對抗環境、戰術運用能力、作戰保障能力等試驗條件,從而為作戰試驗階段的作戰效能全面評估奠定堅實的基礎。為此,結合文獻[6]改進傳統ADC模型為:
(2)

1.2 改進后的作戰效能評估指標體系
在無人機系統《試驗鑒定主計劃(TEMP)》中,美軍關注的作戰效能核心是關鍵作戰問題(COI)[7],如:無人機系統能否在某項任務中及時獲取并傳回偵察、監視的目標信息?有效戰位時間是多少?而后圍繞COI解析出下層作戰效能指標,包括任務成概率、情報價值、生存性、有效工作時間等。
根據無人偵察機作戰試驗階段的操作實施特點,結合其系統性能[8-9]和改進的ADC模型指標[6],建立作戰試驗階段的無人偵察機作戰效能評估指標體系,構建后的指標體系可以與美軍無人機TEMP作戰效能指標內容互相映射,如圖1所示。
2 評估模型指標分析
2.1 可用性A分析
無人偵察機可用性A表示在作戰試驗階段執行戰場偵察任務之前的狀態,是其可承擔任務狀態程度的度量。無人偵察機系統執行任務時,飛行器子系統、地面站子系統、發射和回收裝置、有效載荷、數據鏈路等呈串聯關系,即其中一個分系統完全故障任務就無法完成。有效載荷子系統一般包含電子信號偵察設備、合成孔徑雷達和CCD相機,有任意偵察設備工作即可繼續執行任務,它們之間呈并聯關系,依此構建可靠性框圖,如圖2。
假設各子系統互不影響,分析無人機可靠性框圖(圖2),可得系統共8種工作狀態[10],如表1所示。
無人偵察機可用性A用平均故障時間(MTBF)除以平均故障間隔時間與平均故障修復時間(MTTR)之和來計算。Ai、MTBFi、MTTRi分別表示圖2中各分系統的可用性、平均故障間隔時間與平均故障修復時間,則有:

(3)
式(3)中,i為圖2各部分序號。對于表2中的8種工作狀態,無人偵察機可用性矩陣為:
A=[a1,a2,…,a8]
(4)
式(4)中:
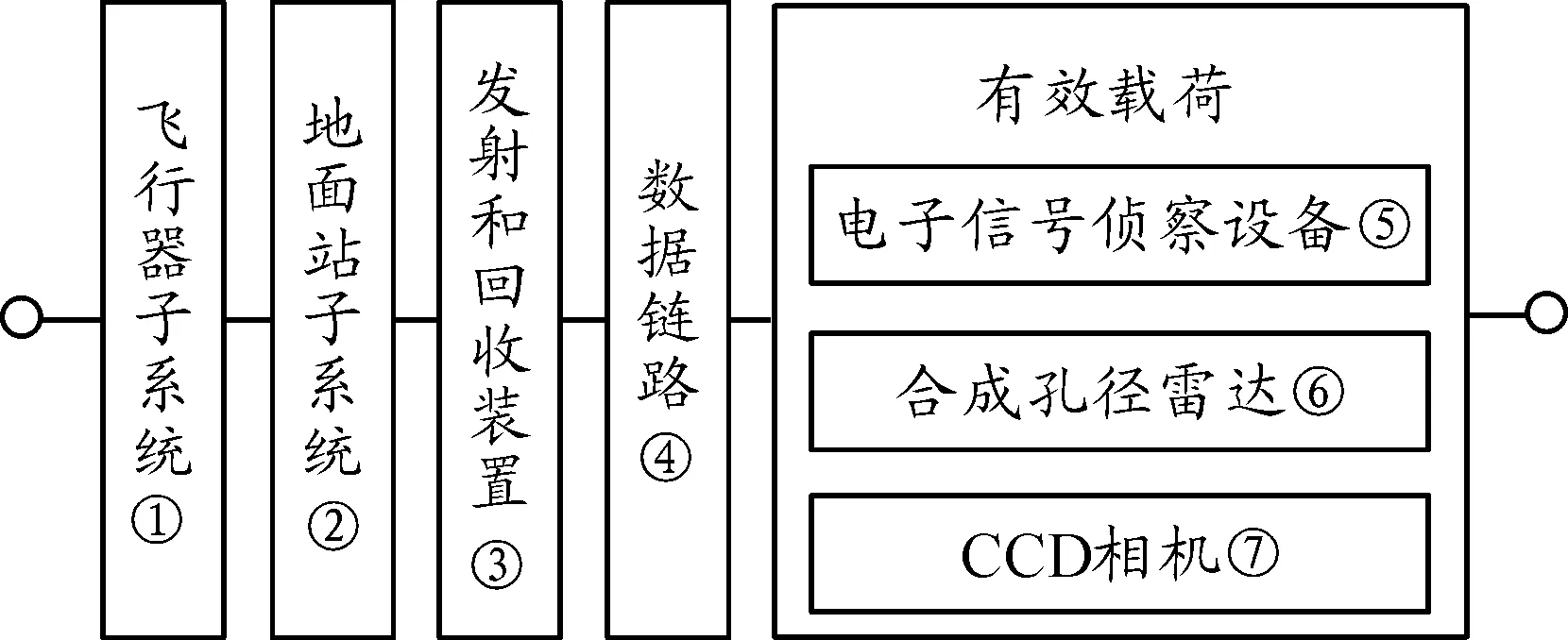
圖2 無人偵察機系統可靠性框圖

表1 無人偵察機系統工作狀態
2.2 可信性D分析
無人偵察機可信性D是指在可用性A已確定的條件下,在作戰試驗階段的任務實施過程中,無人機各子系統正常工作且能完成偵察任務的能力。設無人偵察機系統運行過程中子系統的故障分布時間服從指數分布,由系統故障率、平均故障時間等參數表示可信性函數為:
Ri=exp(-Ti/MTBFi)
(5)
式(5)中,Ti為無人偵察機在作戰試驗中執行任務期間各子系統的工作周期。
d11表示無人偵察機系統從開始工作到任務結束過程中所有部件均保持正常的概率[11]:

(6)
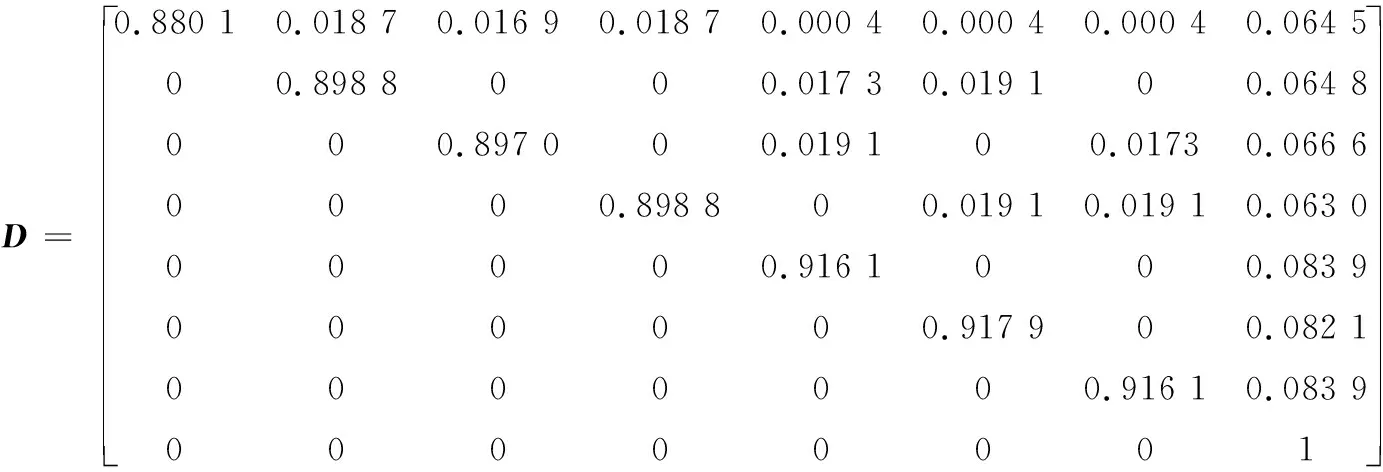
無人偵察機系統由多個子系統或串聯或并聯組成,如果并聯子系統出現故障或者失效等情況,可能會使整個系統的工作能力降維,但是依然可以根據有效載荷性能完成部分偵察任務[12]。然而在試驗過程中,由于無人偵察機在使用時無法修理,出現故障的串聯子系統不可能恢復至正常狀態,因此其可信度矩陣為三角陣,根據式(5)-(6)可得到可信性參數矩陣為:
(7)
2.3 作戰能力C分析
無人偵察機能力矩陣C反應的是無人機系統在不同狀態條件下,完成偵察任務的能力度量,反映了系統性能與實戰能力要求之間的符合程度。
對于作戰能力C的建模方法有很多種,其中文獻[13]采用了武器裝備系統性能指標綜合評價和專家打分相結合的方法,根據性能指標對于作戰任務完成作用權重的不同,通過專家打分的方式給予性能指標一定的加權和評判值。無人偵察機分為各子系統模塊,對應各個子系統功能分類構建性能指標如圖1,進而在8種工作狀態下各子系統性能指標的作用程度不同,在專家確定評判值和權重后確定能力矩陣。
各種工作狀態中無人偵察機作戰能力為:
Ci=(λ1,…,λ8)·[Q1,…,Q8]Τ
(8)
式(8)中:λi為第Ci指標的權重;Qi為第Ci指標的評判值。
綜上,可得能力矩陣C為:
C=[C1,C2,…,C8]Τ
(9)
式(9)中:C1為全系統無故障時的能力;C2為第一個并聯分系統電子信號偵察設備出現故障時的作戰能力;C8為串聯系統故障時的作戰能力,即C8=0。
2.4 戰場對抗環境G分析
無人偵察機戰場對抗環境G是指在作戰試驗中構建逼真的戰場環境,充分考核無人機系統在此條件下的作戰效能發揮程度。從普遍適用性的研究范圍考慮,圖1中指標是作戰試驗環境中的一般對抗環境因素,沒有細化到對抗裝備的具體型號、作用方式和干擾程度。
由線性加權法得到戰場對抗環境因素G為[14]:
(10)
式(10)中:Pij為戰場對抗環境指標中各個因素的具體分值;φi與φij為相應的權重值。
2.5 戰術運用能力T分析
無人偵察機戰術運用能力T反應的是操作人員按照無人機作戰流程和方式,在作戰試驗中完成偵察任務的能力度量,同時檢驗無人偵察機與其他配合試驗裝備系統的互聯互通能力,主要由無人偵察機系統操作人員的滿編率、能力發揮程度以及試驗時裝備系統之間的互操作性,如圖1所示。戰術運用能力T的表達式為:
(11)
式(11)中:T1為操作人員滿編率;T2為操作能力發揮度量;T3為參與配合試驗的裝備系統(非測試裝備)與無人機系統間互操作性程度;ω為由專家打分確定的各項指標權重。
人員滿編率T1表達式為:
T1=H1/H0
(12)
式(12)中:H1為參與作戰試驗的無人機操作人數;H0為計劃編制人數。
參試操作人員能力發揮主要由通過培訓后的操作能力水平和人裝結合程度表示,在作戰試驗環境中,新裝備提供的操作設計、工作環境、人機交互等因素是否符合人員正常操作習慣也是裝備重點考察內容,同時人裝結合程度會直接影響到操作能力的實際發揮情況,為此參試人員操作能力發揮T2表達式為:
T2=T21·T22·T23
(13)
式(13)中:T21為試驗過程中人裝結合不同程度的比例;T22為不同結合程度中人員操作能力實際發揮程度的矩陣;T23為發揮出訓練能力水平的評價值。
① 操作裝備的人裝結合感受度比例T21的表達式為:
(14)
式(14)中,ti為不同人裝結合度感受的人員概率,由試驗鑒定部門得到參與試驗的操作人員評價后統計確定。
② 在試驗過程中,操作人員狀態隨裝備系統的各種因素條件影響而變化,不能保證穩定操作,因此平時訓練水平在試驗中發揮程度會有起伏,如表2所示,不同結合度感受人員操作訓練水平發揮程度矩陣T22的表達式為:
(15)
式(15)中,tij表示在作戰試驗中第i種人裝結合感受程度人員發揮出的j類型水平的概率。由操作人員對照平時訓練成果評價試驗中自身完成任務情況以及專家評判共同確定。
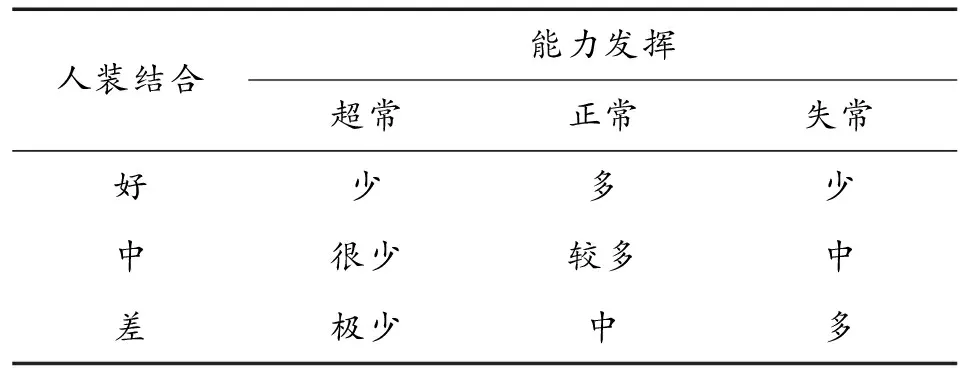
表2 人裝結合影響操作能力發揮狀態
③ 發揮操作能力的評價值T23表達式為:
T23=[z1…zm]Τ,zj<1
(16)
式(16)中,zj為人員發揮出j類型水平的分值。由參與試驗的操作人員所屬單位軍事主管部門根據以往參演經驗、訓練考核成績和專家評判共同確定。
3) 互操作性T3表達式為:
T3=ω31T31+ω32T32,ω31+ω32=1
(17)
式(17)中:T31、T32分別為無人偵察機編組飛行時的協同水平和模擬作戰中與其他裝備間的配合能力,由試驗鑒定部門根據試驗過程中的實際具體情況確定;ω31、ω32為各自指標權重。
2.6 作戰保障能力S分析
無人偵察機作戰保障能力S表示保障人員維修、維護、補給等能力,以及相關保障設備的配套性和數質量對作戰試驗中系統效能發揮的影響作用,主要影響因素包括參與保障人員的滿編率、保障能力發揮程度,以及保障設備的完備率,如圖1所示。作戰保障能力S與戰術運用能力T分別代表無人偵察機對抗效能中完全不同的內在涵義,但是運算模型基本相同,作戰保障能力S的表達式為:
S=ε1S1+ε2S2+ε3S3,ε1+ε2+ε3=1
(18)
式(18)中:S1為保障人員滿編率;S2為保障能力發揮度量;S3為保障設備完備率(非測試裝備);ε為由專家打分確定的各項指標權重。
人員滿編率S1表達式為:
S1=F1/F0
(19)
式(19)中:F1為參與作戰試驗的保障人數;F0為計劃編制人數。
保障能力發揮S2表達式為:
S2=S21·S22·S23
(20)
式(20)中:S21為參試保障人員中不同人裝結合感受度的比例;S22為不同感受度人員發揮保障技術水平的矩陣;S23為發揮保障技術水平的評價值。
① 保障裝備的人裝結合度感受人員比例S21的表達式為:

(21)
式(21)中,si為不同人裝結合感受度的人員概率。由試驗鑒定部門得到參與試驗的保障人員評價后統計確定。
② 不同心理素質人員發揮保障技術水平的程度矩陣S22的表達式為:
(22)
式(22)中,sij表示在作戰試驗中第i種人裝集合感受程度人員發揮出的j類型水平的概率。由保障人員結合平時訓練成果評價試驗中自身完成任務情況和專家評判共同確定。
③ 發揮戰術效力的評價值S23表達式為:
S23=[b1…bm]Τ,bj<1
(23)
式(23)中,bj為人員發揮出j類型水平的分值。由參與試驗的保障人員所屬單位軍事主管部門根據以往參演經驗、訓練考核成績和專家評判共同確定。
保障設備完備率S3表達式為:
S3=ε31S31+ε32S32,ε31+ε32=1
(24)
式(24)中:S31、S32分別為無人偵察機維修、保養等保障設備的配套程度和數量,由試驗鑒定部門和參試保障人員根據試驗過程中的無人偵察機保障情況確定;ε31、ε32為各自指標權重。
3 算例分析
以某型號無人偵察機為研究對象,利用改進后的ADC模型對其作戰試驗階段的作戰效能進行評估,本例只用作模型的運用說明。在作戰試驗中,某型無人偵察機在模擬對抗環境中完成某地域的目標偵察作戰任務,該任務具有以下特點:① 操作、保障人員:選用的參試人員來自某典型作戰部隊,操作和保障能力屬于適中水平[15];② 敵方特點:偵察探測和聯合毀傷等能力突出,干擾攔截我無人偵察機的威脅較大;③ 自然、電磁環境:氣象環境復雜,戰場環境存在電磁干擾比較嚴重。
3.1 計算可用性A分析和可信性D
結合文獻[4-5]中無人偵察機子系統與部件的可信性數據(見表3),假設在作戰試驗中發射和回收裝置任務周期為0.5 h,其他子系統為4 h。

表3 無人偵察機子系統可用性數據
根據無人偵察機子系統7類裝置的平均故障間隔時間和平均故障修復時間,使用式(3)~式(7)計算得到無人偵察機可用性A和可信性D分別為:
可用性矩陣A:

可信性矩陣D:
3.2 計算作戰能力C
按無人偵察機子系統的相應能力列出性能指標,并通過專家為無人機系統不同工作狀態下的性能指標賦分和權重建立作戰能力矩陣[13],如表4所示。
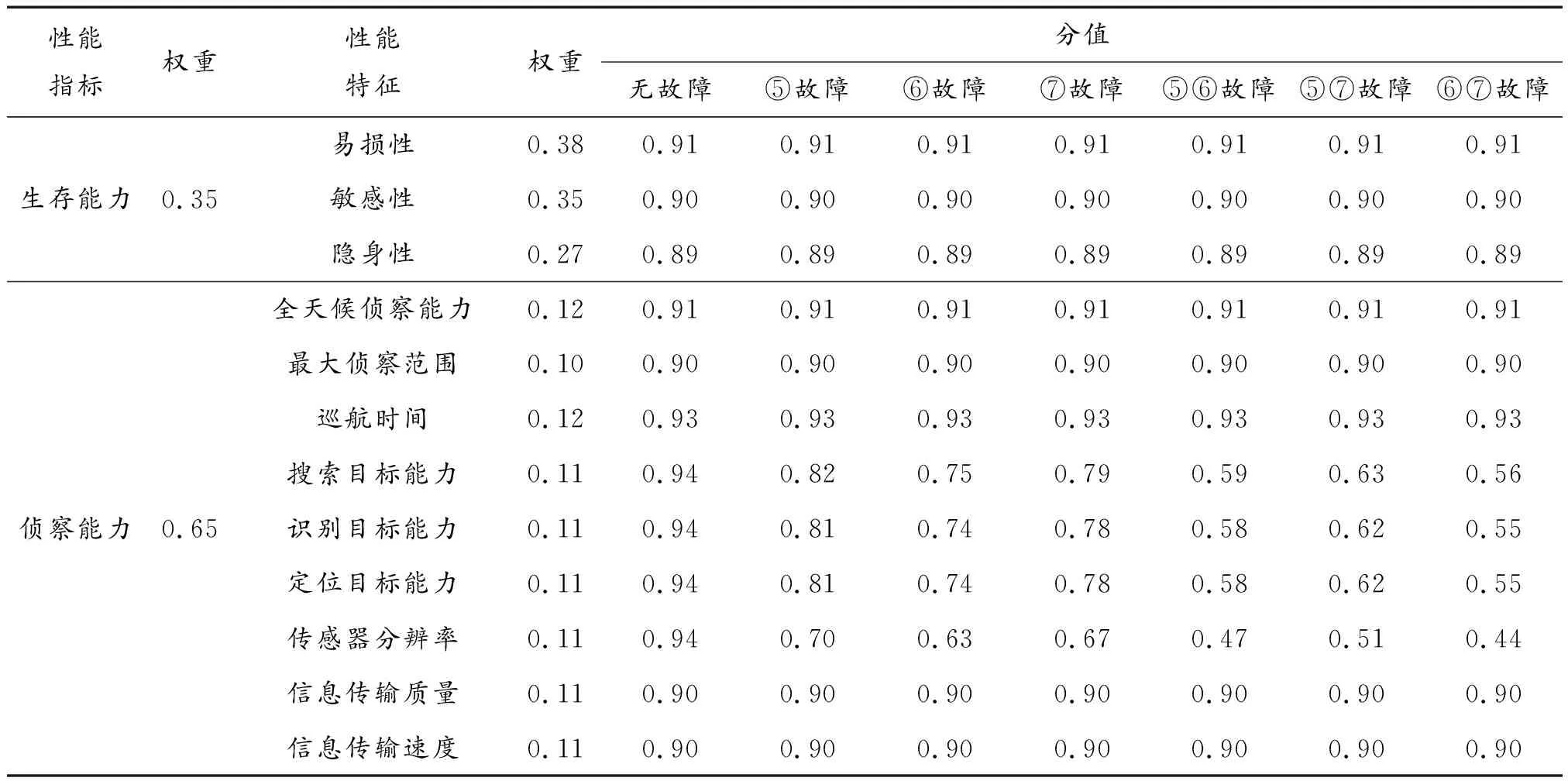
表4 權重打分
使用式(8)~式(9),得到作戰能力C為:
C=[0.915 4,0.867 0,0.845 2,0.857 7,0.795 3,0.807 7,0.785 9,0]Τ
3.3 計算戰場對抗環境G
結合試驗經驗和無人偵察機任務實際,并根據文獻[14]算例,得到戰場對抗環境系數G的各層權重及相關參數值,如表5所示。使用式(10)計算得到無人偵察機的戰場對抗環境系數G為:
G=0.131 6
3.4 計算戰術運用能力T
通常無人偵察機系統操作人員數量較少,在作戰試驗中挑選的參試操作人員可以達到編制人數,因此H1=H0,使用式(12)得到人員滿編率T1為:
T1=H1/H0=1
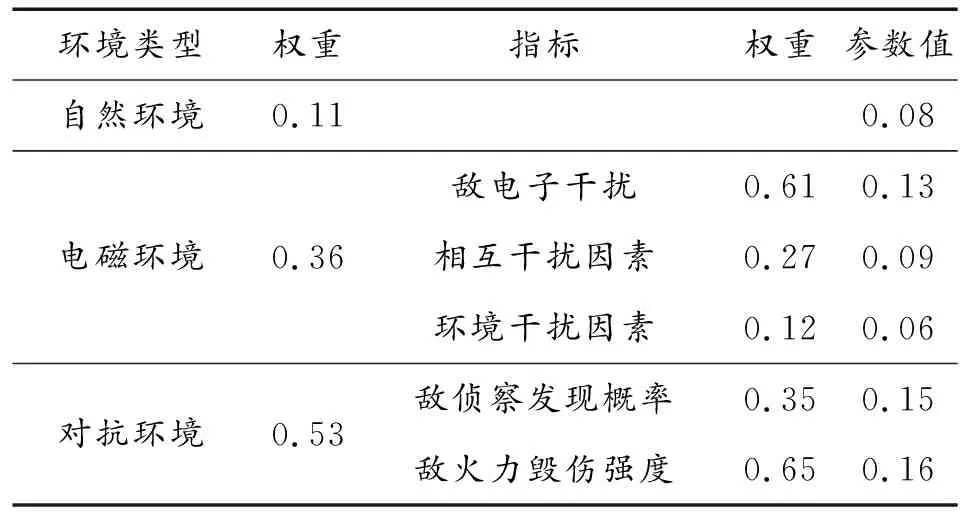
表5 戰場對抗環境系數權重、參數值
假設人裝結合感受度評語取 “好、中、差”三種等級并根據試驗經驗賦分,使用式(14)得到操作裝備的人裝結合感受度比例T21為:
參試操作人員在作戰試驗中發揮水平評語取“超常、正常、失常”三種等級,不同人裝結合感受度人員發揮操作能力水平的不同概率見表6,

表6 人裝結合影響操作能力發揮的概率
使用式(15),得到不同感受度人員訓練水平發揮程度矩陣T22為:
在試驗中選用的操作人員能力應為普遍水平,如選用“金牌操作員”會對裝備評價產生偏差[16],因此根據試驗經驗對操作人員發揮操作能力“超常、正常、失常”取評價值,使用式(16),得到發揮操作能力的評價值T23為:
使用式(13),參試人員操作能力發揮T2為:
假設編隊飛行能力T31,與其他裝備間的配合能力T32的評分分別為“0.89,0.88”,各自指標權重ω31、ω32為“0.6,0.4”,使用式(17),得到互操作性T3為:
T3=0.89×0.6+0.88×0.4=0.886
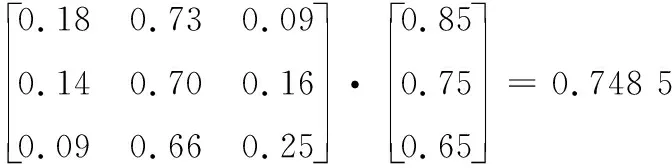
操作人員滿編率T1,操作能力發揮T2,互操作性T3的各項指標權重ω分別為“0.17,0.45,0.38”,使用式(11),得到無人偵察機戰術運用能力T為:
T=0.17×1+0.45×0.748 5+
0.38×0.886=0.843 5
3.5 計算作戰保障能力S
作戰保障能力S與戰術運用能力T運算模型相似,省略其中相同計算過程。參與作戰試驗的保障人員基本可以滿足編制人數,使用式(19)得到人員滿編率S1為:
S1=F1/F0=0.9
使用式(21)得到保障人員的人裝結合感受度比例S21為:
不同人裝結合感受度人員在作戰試驗中發揮保障能力水平的不同概率,使用式(22),得到不同感受度人員訓練水平發揮程度矩陣S22為:
使用式(23),得到保障能力的評價值S23為:
使用式(20),參試人員保障能力發揮S2:
S2=S21·S22·S23=0.761 8
假設保障設備配套率S31,配套保障設備數量滿足度S32的評分分別為“0.88,0.86”,各自指標權重ε31、ε32為“0.55,0.45”,使用式(24),得到保障設備完備率S3為:
S3=0.88×0.55+0.86×0.45=0.871
保障人員滿編率S1,保障能力發揮S2,保障設備完備率S3的各項指標權重ε分別為“0.18,0.43,0.39”,使用式(18),得到無人偵察機作戰保障能力S為:
S=0.18×0.9+0.43×0.761 8+
0.39×0.871=0.829 3
3.6 計算作戰試驗階段作戰效能EO
應用得到的可用性A、可信性D、作戰能力C、戰場對抗環境G、戰術運用能力T、作戰保障能力S,使用式(2),得到無人偵察機作戰試驗階段的作戰效能EO為:
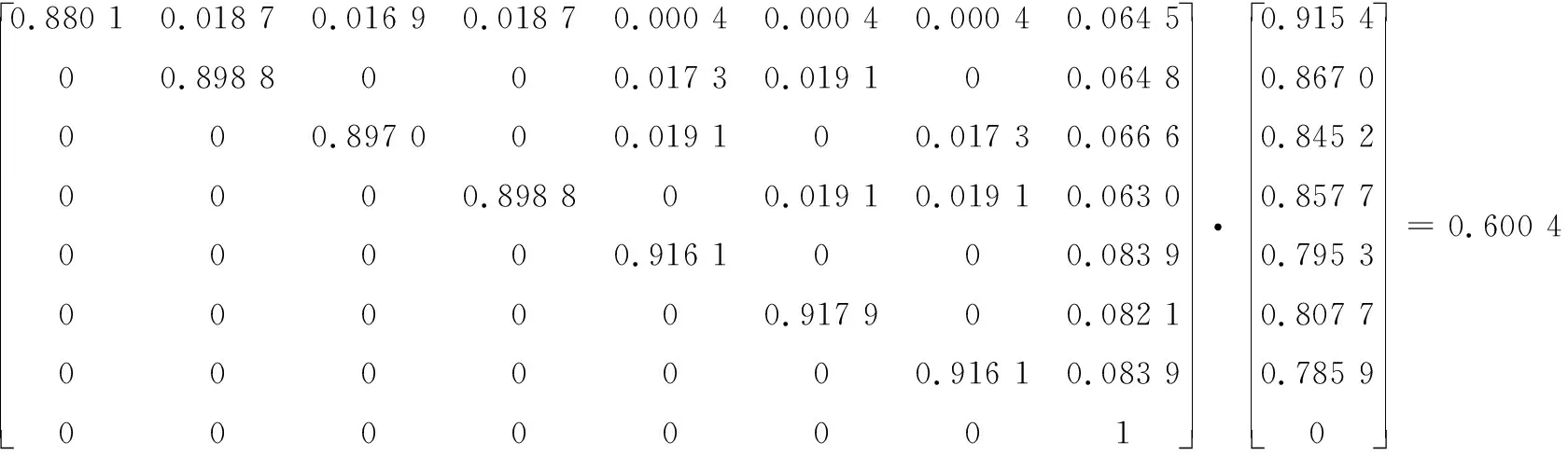
在作戰試驗中實戰因素需要考慮的更為全面,與系統基本效能EB=A·D·C=0.826 6相比,引入對抗效能后的無人偵察機作戰效能EO=0.600 4,雖然效能評估結果有所下降,但更能反映無人偵察機實際的作戰能力,有利于輔助試驗鑒定部門做出決策。
4 結論
從裝備試驗新模式的特點和要求出發,綜合考慮參試人員和戰場對抗環境對無人偵察機作戰效能發揮的作用和影響,同時兼顧戰時作戰和保障的分工不同,改進了傳統ADC模型。運用模型得到的評估結果可為無人偵察機系統的改進方向、戰術保法研究提供參考。
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
家庭影院技術(2017年9期)2017-09-26 03:41:45