厚度測量中對射激光束共線性視覺檢測
2020-09-05 12:02:54李加福朱小平唐文彥
光學精密工程 2020年8期
關鍵詞:測量
李加福,朱小平,杜 華*,唐文彥
(1. 中國計量科學研究院,北京 100029;2. 哈爾濱工業大學 電氣及自動化學院,黑龍江 哈爾濱 150001)
1 引 言
基于激光三角法的厚度測量方式,需要利用兩個激光位移傳感器測量工件的內外兩側,并由傳感器間距減去兩個示值計算出對應的厚度值[1-3]。為了使測量結果符合厚度定義,并且保證傳感器間距標定結果的準確性,兩個傳感器的虛軸在測量前必須重合。但在實際中,如果不經過任何的調校措施,傳感器的安裝很難滿足上述約束條件。因此,雙激光束共線性的檢測成為一個不容忽視的問題。
目前,激光束位姿檢測方法已經取得了一定的進展。根據傳感器的數量,檢測方法可以分為單測頭和雙測頭兩種方式。其中,單測頭激光束空間矢量的標定方法包括平面標定法[4]、球步距標定法[5-6]、等值球點標定法[7]以及在機視覺標定法[8]。它們的核心是由三維導軌帶動傳感器對某已知幾何量進行測量,通過對該幾何量的擬合計算反推激光束位姿。作為一種在機標定方式,它可以實現激光傳感器坐標系與三坐標或機床坐標系的統一,但檢測結果與運動軸精度有關。同時,該類方法對基準件、傳感器方位旋轉的要求,或者對激光束長度的約束,校準過程比較繁瑣,不太適用于雙傳感器激光束共線性/相對位姿的校準。
對于雙側頭測量軸線位姿的檢測,依據傳感器的安裝方式,可以分為反向激光束或者對射激光束測量方法。在反向激光束的位姿檢測方面,Yang[9]利用標準內圓對兩激光束間的夾角進行了標定。劉新波[10]提出了基于階梯狀調校板的反向激光束共線性視覺測量方法,用于解決內徑、平行平面間距的激光測量問題。其測量原理為沿基準方向平移攝像頭,依據獲取的光斑位置和平移距離計算出兩個傳感器光軸的相對位置關系。該方法需對兩個光軸分別進行檢測,并且,當使用兩個對射安裝的激光位移傳感器進行厚度測量時,傳感器間的有限工作距離也使得上述方法不再適用。
在對射激光束的位姿檢測方面,周富強等[11]提出了基于未知運動平面靶的雙傳感器線激光視覺測量系統參數標定方法,其原理是利用平面靶標中的正方形頂點對傳感器進行分別標定,該方法可不依賴于專門的空間坐標測量設備。為了實現基于雙激光的植物葉片厚度檢測,Lee等[12]提出了基于針孔的雙激光束對準方法。將帶有針孔的標準件放置在兩個傳感器之間的不同位置,保證激光束都能夠穿過針孔,可以實現兩個傳感器光軸在測量裝置中的對準。顯然,這種裝配、檢測分離的工作方式,不利于激光傳感器的安裝調整,并且存在精度低,無法數字化、可視化的缺點。
本文在分析激光束共線性最大允差的基礎之上,利用圖像處理可量化光斑中心坐標的優勢,并結合棱鏡的分光作用,提出了一種基于分光棱鏡的對射激光束共線視覺檢測方法,旨在通過計算攝像機獲取的激光光斑中心坐標來判斷激光束之間的相對位置關系。
2 激光束不共線對厚度測量精度的影響
采用激光位移傳感器進行回轉殼段、平行平板厚度測量時,激光束不共線對應的4種測量誤差模型如圖1所示。其中,A和B對應為兩個傳感器的測量起始點,并且兩點之間的距離AB已知,A1和B1為激光束與截面之間的交點(實際測量點),曲率截面圓心為O,兩條激光束之間的夾角為α。

圖1 激光束不共線時厚度測量示意圖Fig.1 Thickness measurement with non-collinear laser beams
對于回轉類殼段而言,其厚度測量誤差為:
Δx=R-
AB×(cosθ-1)+BB1×(1-cosα).
(1)
當內徑OC1的變化范圍為100~1 100 mm,理論厚度A1C1的變化范圍是2~22 mm時,激光束夾角引起的厚度測量誤差如圖2(a)所示。當傳感器位置和圓筒狀殼段內徑不變時,被測件厚度越小、軸線夾角越大,測量誤差就越大,且最大值不小于45 μm。當激光束測量線夾角不大于0.25°時,它引起的厚度測量誤差在0.25 μm以內。當兩條激光束間距的變化范圍是0.5~3.0 mm時,不同激光束間距引起的厚度測量誤差如圖2(b)所示。殼段內徑越小、平行激光束間距越大,測量誤差就越大。當激光束測量線間距不大于0.22 mm時,它引起的厚度測量誤差在0.25 μm以內。
對于平行平板而言,厚度測量誤差等于Δx=AB(cosθ-1)+BB1(1-cosα)。假設AB=25 mm,θ=0.1°,兩條激光束軸向夾角α的變化范圍是0°~4°,理論厚度AC1的變化范圍是2~22 mm,此時激光束不共線引起的厚度測量誤差曲線如圖2(c)所示。當其他參數不變時,被測件厚度越大、軸線夾角越大,測量誤差也就越大,且誤差不大于50 μm。同時,激光束測量線夾角不大于0.25°時,它引起的厚度測量誤差小于0.25 μm。另外,激光束間平行不重合時,測量結果只與平板表面形貌有關。
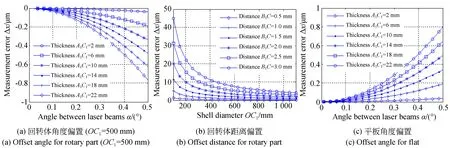
圖2 激光束不共線時厚度測量誤差曲線Fig.2 Thickness measurement errors caused by non-collinear laser beams
上述分析證明了調校激光光軸的必要性。同時,對于厚度大于2 mm的部件而言,為了保證厚度測量誤差小于1 μm,兩條激光光軸之間的夾角應小于0.25°,傳感器測量線之間的距離應小于0.1 mm。這為厚度測量中激光束的共線調整提供了理論依據。
3 基于分光鏡的激光束方向測量原理
3.1 基本原理
激光位移傳感器激光束共線測量裝置的結構及原理如圖3所示。該測量裝置主要由光學成像系統、支架、兩個分光棱鏡、反光鏡和微動平臺組成。其中,將微動平臺的移動方向作為基準方向,并保證分光鏡的激光入射面與該基準線垂直。另外,在共線性測量裝置中,分光鏡1、分光鏡2、反光鏡和接收屏幕都利用支架3固定在微動平臺上。當微動平臺移動時,能夠在保證分光鏡與接收屏位置關系固定的前提下,改變測量裝置與激光器之間的相對位置,進而獲取不同位置的激光束光斑中心。
借助于分光鏡的半透半反功能,傳感器1發出的激光束首先進入分光棱鏡1,在經過棱鏡1、棱鏡2和反光鏡之后,會在CCD接收屏上產生兩個橢圓光斑A1,B1。根據激光在兩個分光棱鏡中的傳播規律,可以將兩個光斑中心的連線作為激光束在分光鏡中的傳播路線。同理,激光位移傳感器2發出的激光首先射入分光棱鏡2,光學成像系統也會采集到該光束對應的兩個光斑A2,B2。利用計算機提取光斑中心坐標,便能計算出當前測量位置兩條激光束之間相對位置關系。
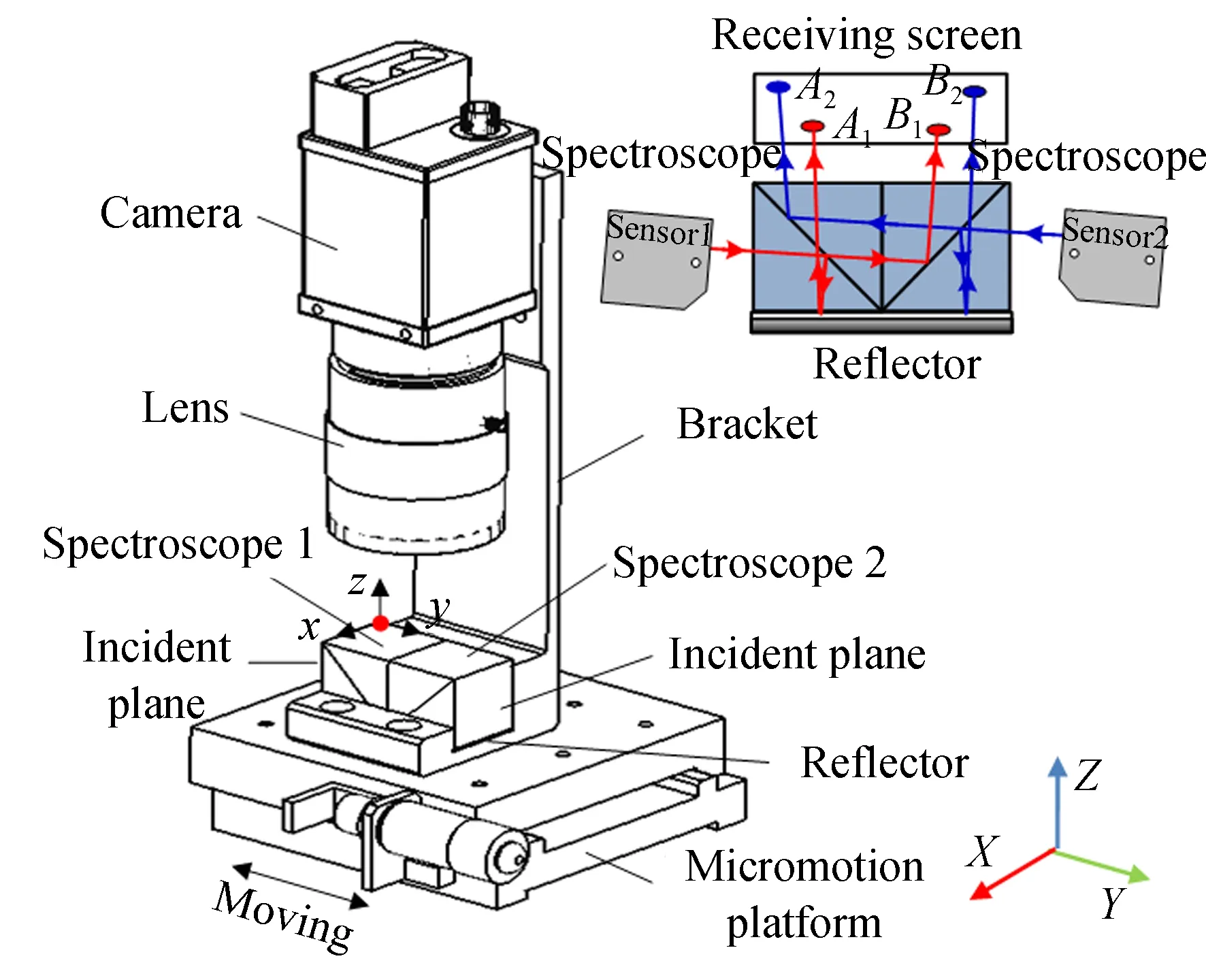
圖3 激光束共線測量裝置示意圖Fig.3 Schematic diagram of laser collinear measuring devices
顯然,為了確立光斑中心坐標與激光束空間位姿之間的關系式,需要對激光束在兩個分光棱鏡中的傳播規律進行分析。根據分光鏡1的頂點及其相鄰的垂直邊,建立了分光鏡坐標系o-xyz。為簡化分析過程,下一節對激光束在xoy,yoz兩個平面內的傳播規律分別進行討論。
3.2 xoy平面內激光束傳播規律
當激光束在xoy平面內的入射角為θxoy,在yoz平面內的入射角為90°,并且忽略兩個分光鏡間隙對光路的影響時,激光傳感器1的傳播路徑如圖4所示。其中,C1F1為理想狀態下的激光束傳播路線,C1D1是考慮分光鏡折射率時的激光束傳播路線。并且,傳感器入射光線和出射光線相互平行,兩光線之間的距離表達式為:
(1)

通常,分光鏡的材料為K9,折射率為1.514,式(1)中的距離表達式可以簡化為:
d=0.339 5L×sin 2θxoy.
(2)
因此,只要傳感器2發射的激光束與激光器1的出射光線D1E1共線,便能保證兩個傳感器對應的光斑中心分別重合。這種光斑重合關系不會隨著測量裝置位置的改變而變化,即光斑重合是保證兩條激光束共線的必要條件。

圖4 激光在xoy平面內的傳播路徑Fig.4 Laser propagation path in plane xoy
另一方面,假設在o-xyz坐標系下激光入射點C1的坐標為(xc,yc,zc),光斑A1的中心點坐標(xa,ya,za)可表示為:
(3)
光斑B1的中心點坐標(xb,yb,zb)可表示為:
(4)
根據式(3)和式(4),推導出光斑間距|A1B1|的表達式為:
(5)
實際光斑A1,B1與理論光斑Ar1,Br1的距離為:
(6)
由式(3)~式(5)可知,當測量裝置沿基準方向y移動距離l時,激光束入射角θxoy保持不變,點A1,B1,C1的x軸坐標發生變化,且大小等于tan(θxoy)×l,距離A1B1始終不變。因此,利用幾何法對圖4中激光束在xoy平面內的傳播規律進行分析可以得出兩個主要結論:(1)在進行激光束測量時,兩個傳感器對應的光斑中心分別重合是保證傳感器光軸共線的必要條件;(2)當測量裝置沿基準方向移動距離l時,光斑中心x軸坐標隨之改變,且大小等于tan(θxoy)×l,而兩個光斑的中心間距保持不變。
3.3 yoz平面內激光束傳播規律
當激光束在xoy平面內的入射角為90°,在yoz平面內的入射角為θyoz時,激光傳感器1的傳播路徑如圖5所示。假設在o-xyz坐標系下激光入射點C1的坐標為(xc,yc,zc),光斑A1的中心點坐標(xa,ya,za)可表示為:
(7)
(8)
根據式(7)和式(8),光斑間距|A1B1|的表達式為:
(9)
因此,當測量裝置沿基準方向y移動距離l時,激光束1的入射角θyoz保持不變,點A1,B1,C1的y軸坐標會發生改變,且大小等于tan(θyoz)×l,而距離A1B1也會隨之增加tan(θyoz)×2l。由于圖3中激光器1的傳播路線并不是中心對稱,當傳感器2的光斑A2,B2與激光器1的A1,B1重合時,傳感器2的激光束入射角一定不等于激光束1的入射角θyoz。這也意味著當測量裝置沿基準直線移動距離l時,點A2,B2的y軸坐標變化量不能等于tan(θyoz)×l,即隨著測量裝置的改變,兩個傳感器的光斑位置和光斑間距都會發生變化。

圖5 激光在yoz平面內的傳播路徑Fig.5 Laser propagation path in plane yoz
另一方面,根據圖5中的三角幾何關系式,可推導出I1G1為激光在兩個棱鏡中形成的反射光線E1A1,K1B1的對稱線。其證明過程如下:
∵∠E1F1G1=∠H1F1G1,∠E1G1F1=∠F1G1H1,F1G1=F1G1
∴ΔE1F1G1≌ΔH1F1G1。
∵∠H1G1K1=J1G1K1,∠H1K1G1=∠G1K1J1,G1K1=G1K1。
∴ΔH1G1K1≌ΔJ1G1K1,E1G1=H1G1=G1J1。
本研究經我院倫理委員會批準(批準文號:IRB-REV-2016005)。選擇2014-09—2015-09因單個牙缺失在我院修復科擬行種植修復的患者109例,其中男59例,女50例,年齡19~72歲,平均(45.03±14.69)歲。

∵E1G1=G1J1,∠D1E1G1=∠G1J1K1,I1G1=I1G1。
∴I1A1=I1B1。
由于B1T1=T1P1,實際光斑B1與理論光斑Br1的距離為|B1Br1|,它與光斑A1以及入射角之間的關系為:
tan(θyoz).
(10)
即|B1Br1|可以表示為:
|B1Br1|=
(11)
同理,光斑A1與理論光斑Ar1的距離為:
|A1Ar1|=
(12)
利用幾何法對圖5中光束在yoz平面內的傳播規律進行分析可以得出兩個主要結論:(1)當測量裝置沿基準方向移動距離l時,光斑中心的y軸坐標隨之改變,且大小等于tan(θyoz)×l,兩個光斑中心點距離增加tan(θyoz)×2l;(2)單條激光束在兩個棱鏡中對應的出射光線E1A1,K1B1關于邊I1G1對稱。
綜上所述,雙光軸共線判斷的標準是:在xoy平面內保證兩條光束共線的條件是兩個傳感器的光斑分別重合并且光斑中心坐標位置不會隨著測量位置的變化而改變;在yoz平面內保證兩條光束共線的條件是兩個傳感器的光斑距離在各個測量位置均相等。
4 圖像坐標系下激光束位姿計算
前一節分析了激光束在分光鏡三維坐標系o-xyz下的傳播路線,但實際光斑中心的處理是在二維圖像坐標系XOY下完成的。因此,需要計算圖像坐標系下雙激光光軸的相對位姿。

由于基準方向與分光鏡坐標系o-xyz的y軸平行,故只需確定圖像坐標系與分光鏡坐標系之間的旋轉角度ω。對式(3),式(4),式(7)和式(8)的分析可得,當測量裝置移動時,在分光鏡坐標系o-xyz下,單個激光束對應的兩個光斑的基準方向坐標分量之和總是等于2L;在圖像坐標系XOY下,該坐標分量之和是常數,即:
(13)

(14)
(15)
(16)
式中KCCD為圖像采集系統的放大倍數。
根據公式(6),在不考慮折射率對光路的影響時,4個光斑中心的x軸坐標位置分別為:
(17)
根據式(17),在xoy平面內兩光軸夾角αxoy的計算公式為:
(18)
根據式(18),在xoy平面內兩光軸間距dxoy的計算公式為:
(19)
另一方面,根據激光在分光鏡坐標系yoz平面內的傳播規律可知,激光傳感器1,2的折射角θi1yoz,θi2yoz分別為:
(20)
根據式(11)和式(12),在不考慮折射率對光路的影響時,4個光斑中心的y軸坐標分別為:
(21)
根據式(21),在yoz平面內兩光軸夾角αyoz為:
(22)
根據式(22),在yoz平面內兩光軸間距dyoz為:
(23)
5 實 驗
5.1 共線性測量實驗

圖6 光軸共線性測量裝置Fig.6 Measurement device of optical axis collinearity
激光束共線測量實驗裝置如圖6所示,利用該裝置對兩個激光位移傳感器之間的相對位姿進行了調節和測量。傳感器型號為德國米銥ILD1700-10LL,測量范圍為10 mm。攝像機的型號為MER-500-7UM/UC,通過USB將采集到的兩條激光束對應光斑傳輸給計算機,經標定后光斑圖像單個像素對應的實際尺寸為0.02 mm。在實驗中,僅需要采集厚度測量范圍內的激光光斑,即在微動平臺示值為5,10,15,20處分別對光斑中心進行測量。在測量前,需要粗調激光位移傳感器與測量裝置之間的位置,使其中一個傳感器的示值在-5 mm左右。整個測量過程進行了3次重復性測量。對光斑中心的提取采用多閾值加高斯擬合的方法[13-14],表1,表2分別為在不同測量位置獲取的傳感器1和傳感器2對應光斑的中心坐標。
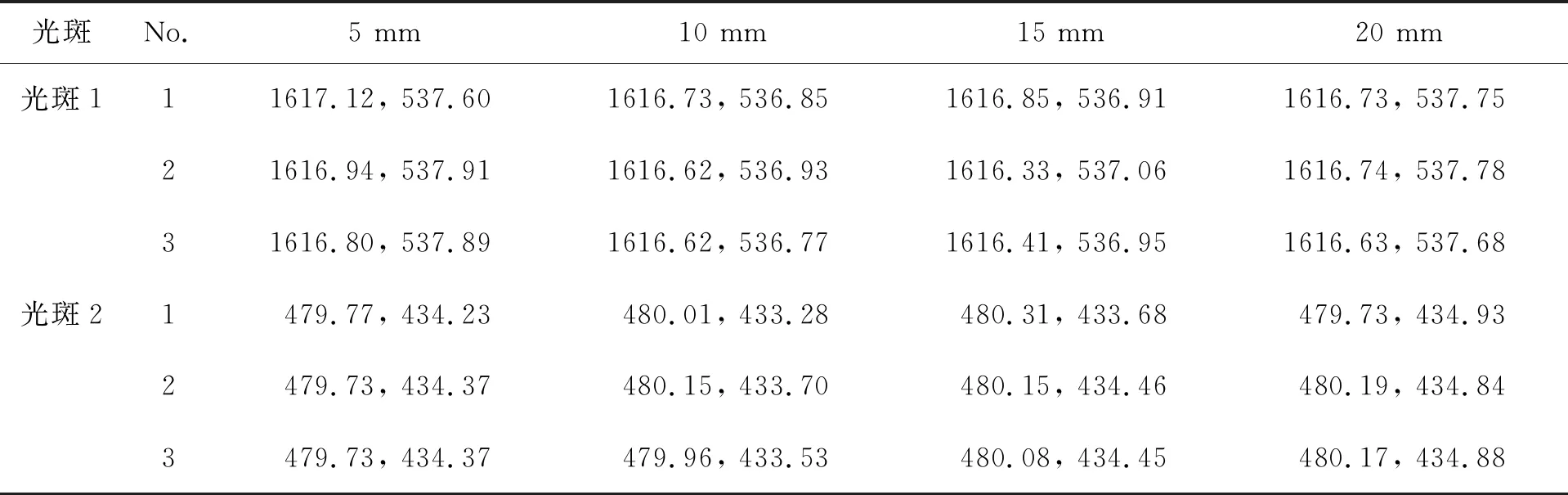
表1 圖像坐標系XOY下激光束1光斑中心的測量結果
根據第4節雙激光束位姿的計算方法,獲取的兩個傳感器測量線之間的相對位姿關系如表3所示。從表3可知,兩個傳感器測量線之間的夾角最大為0.17°;在有效測量范圍內,兩條激光束之間的位置差最大為0.05 mm,滿足激光束共線性最大允差的設計要求。從3組測量結果中可以發現,該測量方法具有較好的重復性。
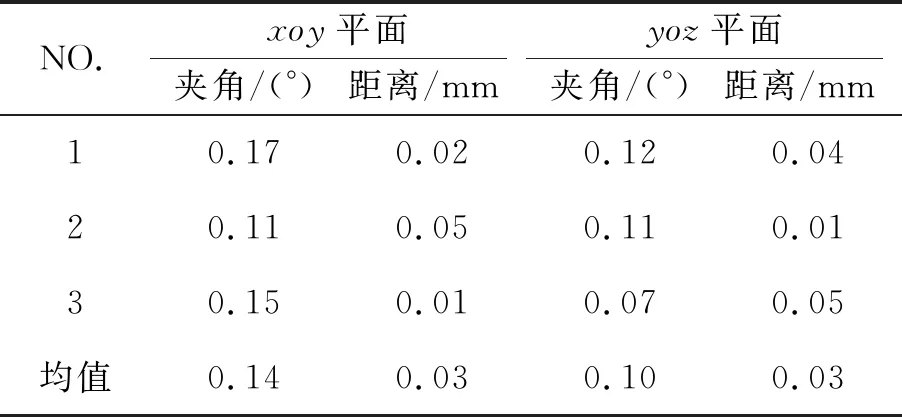
表3 棱鏡坐標系o-xyz下激光束相對位姿測量結果
5.2 厚度測量實驗
兩傳感器間的初始距離值是進行厚度測量的前提。因此,本文首先利用10,0.5 mm的標準0級量塊(研合后標準距離值為10.5 mm)對傳感器間距進行了標定,5次測量結果表明傳感器間距為9.908 8 mm,標準差為0.001 1 mm。
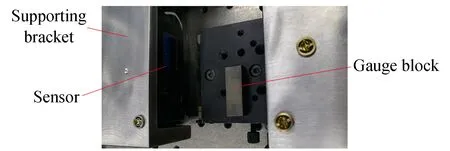
圖7 基于量塊的厚度測量實驗Fig.7 Thickness measurement based on gauge block
在此基礎上,采用不同尺寸的量塊對調節前后的厚度測量結果進行了對比實驗,實驗結果如表4所示。經過調校后,傳感器組合對各種尺寸量塊的測量誤差明顯減小,測量值和量塊標稱值間的差異小于4 μm。由于第2節中關于平板厚度測量理論的推導并未考慮傳感器自身精度(測量重復性小于3 μm)、人為操作等因素的影響,此次實驗數據大于理論分析的結果。
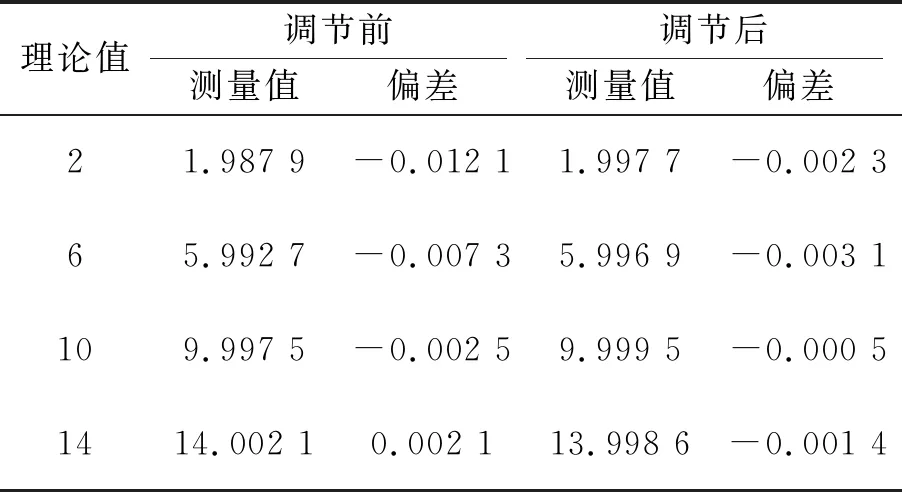
表4 調節前后厚度測量結果對比
6 結 論
本文針對對射激光束共線調節這一基于兩個位移傳感器厚度測量中的共性核心問題,提出了一種基于雙分光棱鏡的激光束空間視覺定位方法。本文重點分析了光線在兩個分光鏡上形成的平面光斑圖像及其坐標分布規律,借助于圖像坐標系與棱鏡坐標系之間的轉換關系,建立了4個光斑圖像中心點坐標與兩個傳感器測量線相對姿態間的數學模型。對兩個傳感器共線性的測量實驗表明,激光束之間的夾角不大于0.17°,距離不大于0.05 mm,滿足厚度測量的要求。利用調節后的傳感器對多種尺寸的標準量塊進行了重復測量,厚度測量誤差減小到4 μm,間接驗證了共線調節方法的有效性。與現有對射激光束共線性測量方法相比,所提方法具有高精度、數字化、可視化可溯源的優勢,并且可以輔助激光位移傳感器的安裝與調節。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00