高速公路改擴建的漸變安全限速設置方法
2020-09-03 05:45:30程國柱薛長龍劉興旺
哈爾濱工業大學學報 2020年9期
程國柱,程 瑞,薛長龍,劉興旺
(1.東北林業大學 交通學院, 哈爾濱 150040; 2.吉林省高等級公路建設局, 長春 130033;3.北京中交華安科技有限公司, 北京 100088)
高速公路改擴建工程引起的行車條件惡化導致交通事故頻發. 據相關數據統計,發生在高速公路作業區的交通事故占事故總數的2%~3%,受傷、死亡事故數比正常路段高約17.3%,而夜間交通事故死亡率是白天的2.5倍[1],且事故原因多為超速行駛,因此有必要在高速公路作業區設置限速標志. 與高速公路一般施工作業不同,由于改擴建工程工期長且施工復雜,使得路側設置的交通標志多而繁雜,行車環境也更為惡劣,導致駕駛人難以從大量交通信息中發現限速信息. 另外,由于改擴建工程中嚴格的車速限制導致車速驟降,更易造成追尾事故. 因此設置在改擴建作業區的限速標志不僅要能夠及時、有效地提醒駕駛人安全行車,更要從人機工程學角度考慮位置設置的科學性、合理性. 若限速標志設置過于密集,不僅增加了施工成本,而且會對駕駛人造成視覺負擔;若限速標志設置太稀疏,就達不到提示駕駛人安全降速的目的. 漸變限速標志通過對限速標志的連續設置,可以實現逐級限速,這樣不僅能夠保證駕駛人及時發現限速信息,而且考慮了速度降低的連續性和過渡性,保證了車輛安全平穩降速,能夠有效減少追尾事故的發生. 中國《道路交通標志和標線》[2]規定:養護作業控制區的逐級限速標志可按照每200 m降低20 km/h的方式設置. 上述規定只給出了限速標志設置間距的一般取值,并沒有針對不同限速值的漸變限速標志間距進行量化分析.
國外主要開展限速標志的識別及限速系統整體優化研究,文獻[3]通過虛擬駕駛試驗,驗證了重復設置限速標志能夠有效地控制車速,強調了在某些特殊路段重復設置限速標志的必要性. 文獻[4]通過建立雙層規劃模型并結合具體的案例分析,得到了高速公路作業區合理的限速值及可變限速標志的設置方案. 文獻[5]通過遺傳算法對高速公路可變限速系統進行優化分析,證實了優化后的可變限速系統能保障高速公路的安全暢通. 文獻[6-8]為了提高惡劣天氣條件下的行車安全,先后開展了夜間和大霧條件下限速標志的識別方法研究.
國內對于限速標志的前置距離以及限速值重復設置間距的研究較多,文獻[9]基于駕駛人的視覺特性以及信息短時記憶特性建立了最小前置距離計算模型,確定了路側限速標志的最佳設置位置. 文獻[10]通過實車試驗,給出了城市道路人行橫道處夜間限速標志前置距離建議值. 文獻[11]建立了駕駛人短期記憶衰減規律指數模型,給出高速公路限速標志重復設置的合理間距. 相對于重復設置的限速標志,漸變限速標志具有良好的過渡性、穩定性,容易被駕駛人所接受. 因此,文獻[12]通過VISSIM仿真軟件對多種漸變限速方案實施了效果評價. 文獻[13]通過現場試驗,證實了漸變限速優化后的交通標志能夠有效降低車速.
綜上所述,目前國內外涉及到漸變限速標志設置間距的研究較少. 另外,由于夜間復雜的行車條件會影響駕駛人的視線,導致視認能力變差,使得夜間事故風險率高于白天,因此有必要開展夜間限速標志設置間距的研究. 為此,本文以前人的研究為基礎,從駕駛人晝夜行車過程中的視認性角度出發,并結合駕駛人制動特性,進一步開展高速公路改,擴建作業區晝夜漸變限速標志的設置間距研究. 研究成果有助于提高高速公路改擴建作業區上游的行車安全性和穩定性,為今后高速公路相關作業規程的修訂提供了一定的理論依據.
1 駕駛人晝夜視認性分析
無論白天還是夜晚,駕駛人在駕車過程中,面臨著復雜的行車環境及各種交通信息和指示,只有獲得及時的視覺信息和有效的肢體反應,才能順利完成各種操作. 另外,由于駕駛人精力不集中或者觀察不及時可能導致駕駛人沒能看到限速標志或者減速發生滯后,為了確保駕駛人能夠有效獲取減速信息并順利減速,駕駛人讀取路側限速標志的視認過程(如圖1所示)可描述為:駕駛人行駛至A點發現限速標志F點并開始讀取,直到C點讀完,在讀取標志的過程中,駕駛人準備采取制動措施并從B點開始制動,隨著車輛前進,標志點F會消失在駕駛人視野中,此時對應消失點E,整個制動過程直到D點完成. 其中LAF為駕駛人的視認距離,LAB為制動反應距離,LBD為制動距離,LDF為標志的前置距離,LEF為標志的消失距離.

圖1 視認過程
1.1 駕駛人視認距離
駕駛人實際駕車過程中,行駛至路段某一位置時可以發現前方的路側標志,那么此時車輛至前方路側標志的距離稱為視認距離,視認距離包括讀取距離和識別距離. 駕駛人在讀取標志的時間段內車輛行駛的距離為讀取距離;駕駛人識別限速值后,車輛至限速標志的距離為識別距離. 其中,讀取距離為
(1)
式中:t1為讀取標志時間,s;V0為車輛行駛速度,km/h.
駕駛人讀取標志的時間主要受光照強度的影響,通過相關試驗結果[14]分析可得,當光照強度大于500 lx,即白天條件下,駕駛人讀取標志的時間約為1.4~3.1 s;當光照強度小于100 lx,即夜間條件下,駕駛人讀取標志的時間約為2.4~3.4 s. 為了從安全角度考慮,計算時均取上限值.
假設車輛行駛在單向雙車道外側車道上,構建的限速標志識別距離計算模型為
(2)
式中:I為限速標志中心點與駕駛人視線高差,m;S為限速標志與駕駛人的橫向距離,m;h1為限速標志下邊緣離地高度,m;h2為路肩高度,m,取0.2 m;R為限速標志半徑,m;h3為駕駛人的視高,m,取1.2 m;m為限速標志內邊緣距離最外側行車道的距離,m;W為行車道寬度,m;α為駕駛人視野范圍,(°). 計算原理如圖2所示.
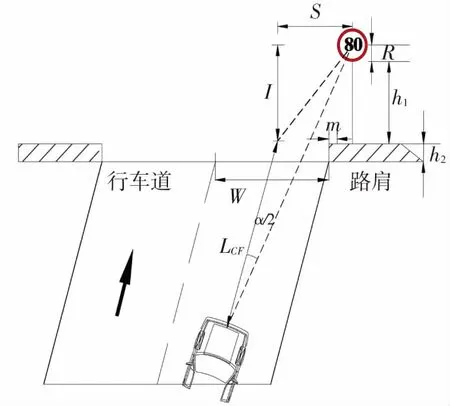
圖2 識別距離計算原理
路側限速標志通常采用圓形結構,根據中國《道路交通標志和標線》[15]的規定:圓形結構標志半徑R一般為0.5 m,柱式標志下邊緣離地高度為1.5~2.5 m,標志內邊緣距離最外側行車道不小于0.25 m. 考慮到限速標志可能會被其他車輛遮擋,為了確保駕駛人能夠及時發現限速標志,標志應盡可能設置在較高位置,且不宜距離車道太遠,故本研究采用標志下邊緣最大離地高度為2.5 m,以及標志內邊緣距最外側行車道最小距離為0.25 m.
由人體工程學可知,車輛在白天高速行駛狀態下,由于近處物體在眼前快速閃過而難于認清,駕駛人會傾向性地關注遠方物體,因此導致視線變長、視野范圍變窄. 根據文獻[16]研究成果可得,駕駛人白天視野范圍一般隨車速變化而改變,當車速分別為40、60、80、100、120 km/h時,對應白天視野范圍α′分別為100°、86°、60°、40°、22°. 實際上,車輛在白天行駛過程中,駕駛人為了兼顧路面狀況,其視野范圍往往小于上述值,并且研究認為駕駛人視錐邊緣處的認讀能力極差,為了正確辨識路側交通標志,駕駛人最理想的視野范圍為30°[17]. 因此,當車輛在低速行駛狀態下,視野范圍大于30°時,計算時取30°;視野范圍小于30°時,計算時取實際視野范圍.
車輛在夜間行駛過程中,由于駕駛人的視力受到影響,駕駛人會傾向性地關注近處物體,因此導致視線變短、視野范圍變寬. 駕駛人主要借助車輛開啟的燈光觀察周圍路況,因此駕駛人的視野范圍主要取決于車燈開啟的幾何可見度. 通常遠光燈幾何可見度α1、α2≥5°,近光燈幾何可見度α1=45°,α2=10°[18]. 駕駛人進入作業區之前,隨著交通指示信息的增多,需要時刻注意周圍行車條件的不斷變化,應開啟近光燈. 由此可近似計算夜間駕駛人駕車過程中的視野范圍為
α″=180°-2(90°-α1).
(3)
式中α1為車輛外側車燈的幾何可見度,(°). 計算原理如圖3所示.
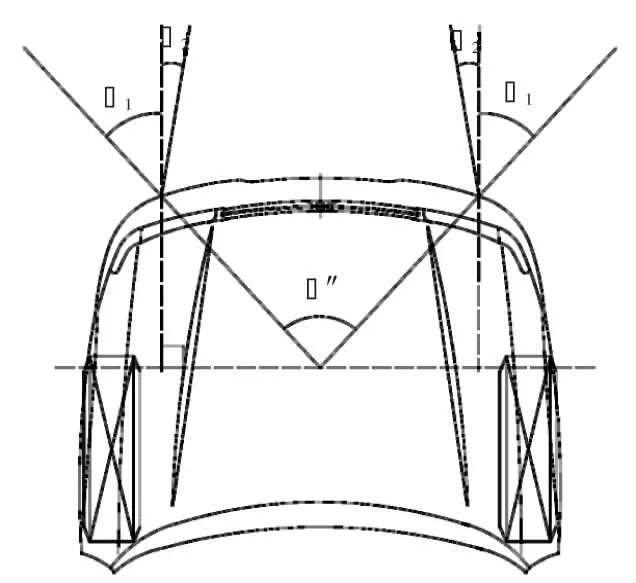
圖3 駕駛人夜間視野范圍計算原理圖
1.2 限速標志前置距離
為了保證車輛行駛至道路某一位置時能夠減速到規定的限速值,限速標志應設置在該位置之前的一定距離處,這個距離稱為限速標志前置距離LDF. 為了保證駕駛人在限速標志消失之前,能夠發現限速標志,根據圖1所示的視認過程,需滿足:LAE=LAB+LBD-LEF-LDF≥0,即LDF≤LAB+LBD-LEF. 由關系式可知,限速標志前置距離取決于限速標志消失距離、駕駛人制動反應距離和制動距離.
1.2.1 限速標志消失距離
當車輛行駛到距離限速標志牌某一點處時,標志將消失在駕駛人的視野中,這一點為標志的消失點,消失點到標志的距離即為限速標志消失距離. 通常認為只有當限速標志的下邊緣從駕駛人的視野中消失時,限速標志才完全消失. 因此,基于限速標志識別距離模型,可以推算出限速標志消失距離模型為
(4)
式中M為駕駛人視線與限速標志標志下邊緣的垂直距離,m. 為了更好地與識別距離模型區分開,圖4給出了消失距離與識別距離的計算簡圖.
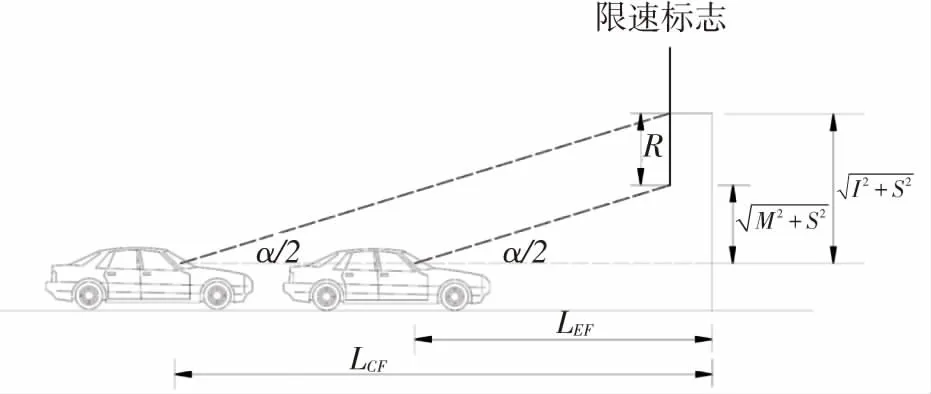
圖4 消失距離與識別距離計算簡圖
1.2.2 駕駛人制動反應距離
當發現前方有限速標志時,駕駛人需要經過對前方物體識別、判斷決策、右腳對加速踏板、制動踏板的轉換操作及車輛逐漸產生制動力等過程,在上述過程中車輛所行駛的距離即為制動反應距離,計算公式為
(5)
式中t2為制動反應時間,s.
由于駕駛人白天和夜間駕車過程中的身體機能不同,心生理變化規律不一致,導致制動反應時間不一樣. 大部分研究認為,駕駛人的制動反應時間隨著車速、駕駛人疲勞程度和年齡的增加而增大,一般低于2 s,為了從安全角度考慮,計算時白天制動反應時間取2 s;考慮到夜間駕駛人容易疲勞,其疲勞程度可用覺醒水平來描述. 由于人的反應時間與覺醒水平呈正相關,可通過駕駛人晝夜相對覺醒水平和白天制動反應時間計算夜間制動反應時間,計算公式為
t″2=mt′2.
(6)
式中:t′2為白天制動反應時間,s;t″2為夜間制動反應時間,s;m為駕駛人夜間制動反應時間修正系數平均值.
文獻[19]給出了夜間不同時間段的駕駛人制動反應時間修正系數,當夜間時段分別為18:00—21:00、21:00—24:00、00:00—03:00和03:00—06:00時,對應修正系數分別為0.9、1.1、1.3和1.5,由此可得修正系數平均值m為1.2,進而求得夜間制動反應時間為2.4 s.
1.2.3 駕駛人制動距離
當駕駛人對車輛開始制動,隨著制動力上升,車輛減速度逐漸增大,在t3時刻達到最大減速度amax,隨后amax保持不變,車輛在t3—t4時段內進行全制動. 整個制動過程如圖5所示.
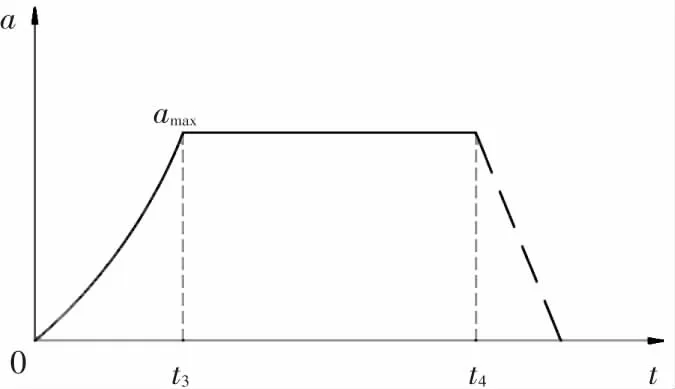
圖5 車輛減速度變化過程
由于0—t3時段內的車輛減速度時刻處于變化的狀態,難以利用一般的運動學公式進行求解. 為此,根據文獻[20]的研究成果,0—t4時間段內的車輛制動距離為
(7)
式中:t3為制動力上升時間,s,取0.2 s;V為限速標志限速值,km/h;amax為車輛最大減速度,m/s2,取3.4 m/s2[21].
通過構建限速標志消失距離、駕駛人制動反應距離和制動距離模型,整理得到限速標志前置距離計算模型為
(8)
2 漸變限速標志設置間距計算
根據中國《道路交通標志和標線》[2]的規定,高速公路改擴建作業區分為警告區、上游過渡區、緩沖區、工作區、下游過渡區和終止區,其中警告區、上游過渡區和緩沖區較其他區域更容易發生交通事故,通常認定為事故多發區,這里統稱為作業區上游,如圖6所示. 為了保證車輛安全平穩地經過施工作業區,作業區上游均應設置限速標志. 由于漸變限速標志考慮到了速度降低的連續性和過渡性,更容易被駕駛人所接受. 因此,本文主要針對高速公路改擴建作業區上游進行晝夜漸變限速標志的設置間距研究.
2.1 基于運動學的計算方法
假設車輛在兩個相鄰的限速標志之間保持均減速直線運動,可利用運動學公式計算限速標志間距為
(9)
式中:x為限速標志設置間距,m;V11為第1個限速值,m/s;V22為第2個限速值,m/s;a為車輛減速度,m/s2,取值需根據駕駛人視認特征分析來獲取.
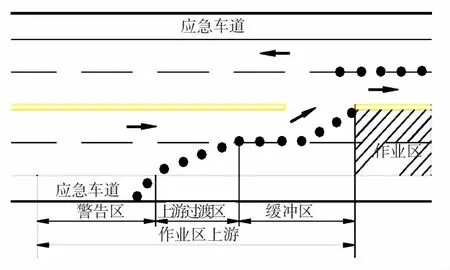
圖6 作業區上游示意圖
2.2 基于駕駛人特性的計算方法
考慮到駕駛人在行車過程中要源源不斷地接受各種交通指令和路況信息,同時視線也會受到道路環境的干擾,因此限速標志空間位置的設置應符合駕駛人行車過程中的視認規律. 基于對駕駛人晝夜視覺特性以及視認過程的分析,本文提出了一種高速公路作業區漸變限速標志間距的計算方法,計算步驟如下所述,計算原理如圖7所示.
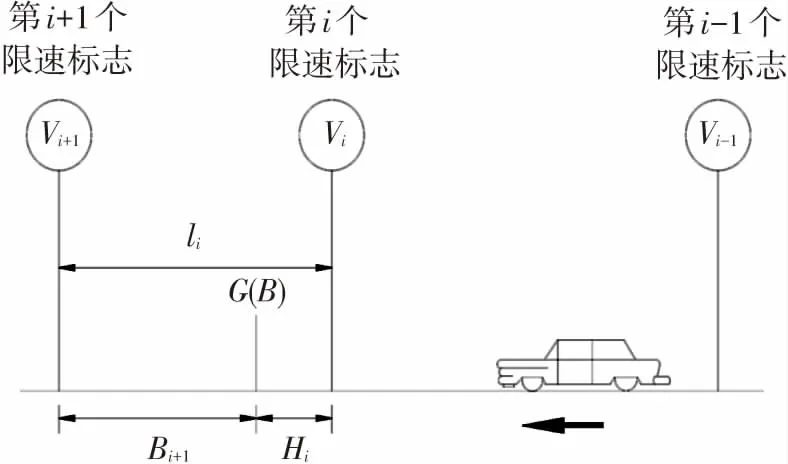
圖7 計算方法原理圖
設第i個限速標志和第i+1個限速標志的間距為li,對應的限速值分別為Vi和Vi+1(Vi>Vi+1). 如果車輛以速度Vi-1駛過第i-1個限速標志, 首先根據式(8)計算第i個限速標志的前置距離Hi. 此刻車輛行駛至G點的速度值應為Vi,這時認為駕駛人已經發現前方第i+1個限速標志,記為點B(B點和G點重合). 于是對駕駛人關于第i+1個限速標志的視認距離可根據式(1)、(2)進行求解,即讀取點B至第i+1個限速標志的距離Bi+1. 由此可得間距li的計算方法為

(10)
3 實例應用
3.1 工程概況
琿烏高速公路吉林至龍嘉機場段高速公路(G12)改擴建工程全長63.247 km. 施工組織采用半幅通車半幅施工的交通組織方式. 施工道路原為雙向四車道,路基寬度為34.5 m,中央分隔帶寬度為10.5 m,左側路緣帶寬度為2×0.75 m,行車道寬度為2×2×3.75 m,硬路肩寬度為2×3.00 m,土路肩寬度為2×0.75 m,設計速度為120 km/h. 本次對現有高速公路中央分隔帶預留的兩車道進行恢復建設,形成完整的設計速度為120 km/h的雙向六車道高速公路,路基寬度維持原有路基寬度.
3.2 限速標志設置
為了減小事故損失,保證工程施工作業順利進行. 根據項目的交通組織方案,施工作業區上游應進行區段降速設置. 根據《道路交通標志和標線》[2]中關于作業區最終限速值的規定,設定作業區上游限速值為40 km/h,限速標志采取遞減量為10 km/h的方式設置,具體限速值分布情況如圖8所示. 為避免駕駛人視線被相鄰車道的車輛遮擋而未能及時發現限速標志,道路兩側均應同步設置限速標志,即位于內側車道行駛的駕駛人主要關注中央分隔帶處的限速標志,位于外側車道行駛的駕駛人主要關注外側車道邊緣處的限速標志.

圖8 作業區上游限速值分布圖
3.2.1 白天作業區上游限速標志間距計算
根據式(8)計算距離作業區最近的限速標志的前置距離為28 m,根據式(10)計算各個限速標志之間的距離分別為:l7=H7+B8=92 m;l6=H6+B7=108 m;l5=H5+B6=125 m;l4=H4+B5=142 m;l3=H3+B4=158 m;l2=H2+B3=175 m. 對于l1的計算,本文認為車輛以最高限速為120 km/h的速度進入減速路段,由此可得:l1=H1+B2=192 m.
3.2.2 夜間作業區上游限速標志間距計算
同理,根據式(8)得到距離作業區最近的限速標志的前置距離為39 m,根據式(10)得到各個限速標志之間的距離分別為:l7=102 m、l6=120 m、l5=139 m、l4=158 m、l3=176 m、l2=195 m、l1=214 m.
通過以上計算分別得到作業區上游限速標志的晝夜設置間距,如表1所示,并繪制了限速標志晝夜設置間距與限速值的關系圖,如圖9所示. 從表1和圖9中可以看出,隨著限速標志限速值的增大,相鄰限速標志設置間距隨之增大,二者呈正線性相關,且夜間設置間距比白天設置間距增幅大. 另外,夜間限速標志設置間距大于白天限速標志設置間距,分析認為由于夜間復雜的行車條件導致駕駛人的視線和反應能力受到影響,駕駛人需要更多的時間來獲取交通指示信息,然后及時進行相應的操作. 因此,適當地增加夜間限速標志的設置間距能夠給駕駛人提供一定的反應距離進行減速操作,保障了行車安全性和穩定性.
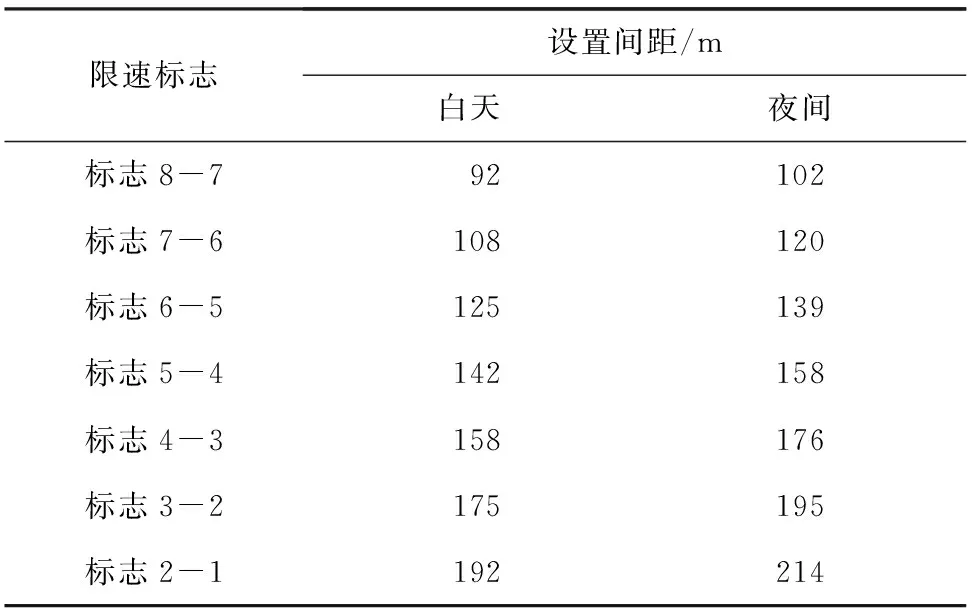
表1 作業區上游限速標志設置間距
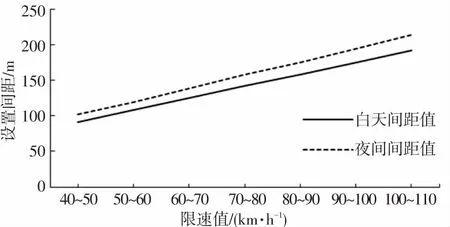
圖9 晝夜設置間距與限速值的關系
根據相鄰限速標志的設置間距,利用式(9)可求相鄰限速標志之間的車輛平均減速度值,如表2所示,并繪制了車輛晝夜平均減速度特性散點圖,如圖10所示. 從表2和圖10中可以看出,隨著限速標志限速值的減小,車輛晝夜平均減速度隨之減小,且減小幅度越來越大,二者近似呈正線性相關,夜間平均減速度小于白天平均減速度. 對于上述變化特點,分析認為:駕駛人第1次看到限速標志,一般會集中注意力,采取較強的制動,對應于圖10中的110 km/h到90 km/h的限速區段;隨著對漸變限速標志的適應,駕駛人對車輛的制動程度逐漸減弱,對應于90 km/h到60 km/h的限速區段;隨著限速值的繼續減小,駕駛人會根據不同路段的限速值不斷地調節車輛減速度的大小以保證順利減速到作業區上游規定的限速值,對應于60 km/h到40 km/h的限速區段.
通過以上分析可得,本文基于視認性的計算方法得到的晝夜間距值符合駕駛人晝夜行車過程中不同的視覺特性和反應特性,同時得到的車輛平均減速度特性能夠反應駕駛人行車減速過程中的心生理特征,證明了該方法考慮了駕駛人的駕駛行為特點,確定了更為合理的間距值.
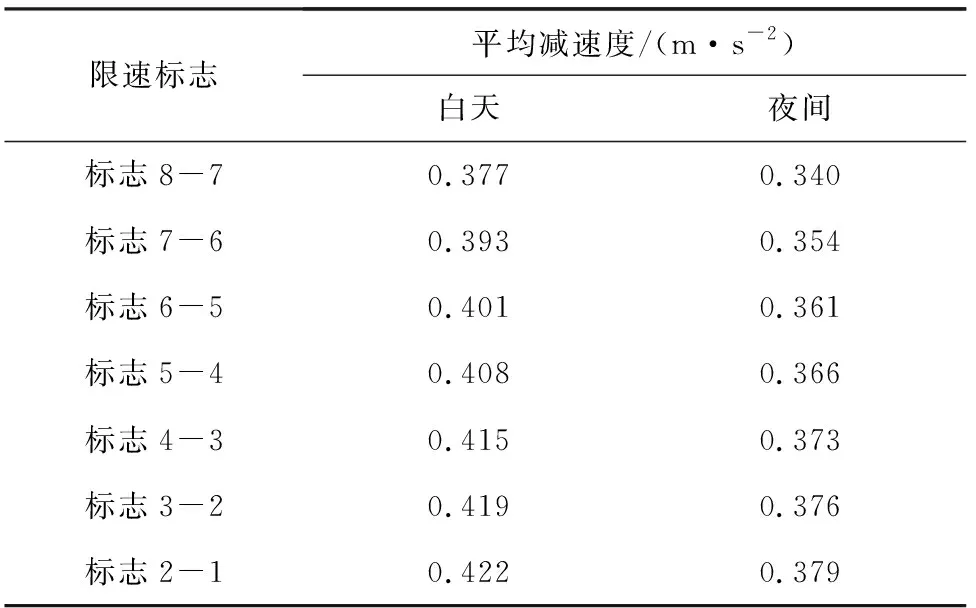
表2 相鄰限速標志之間的車輛平均減速度
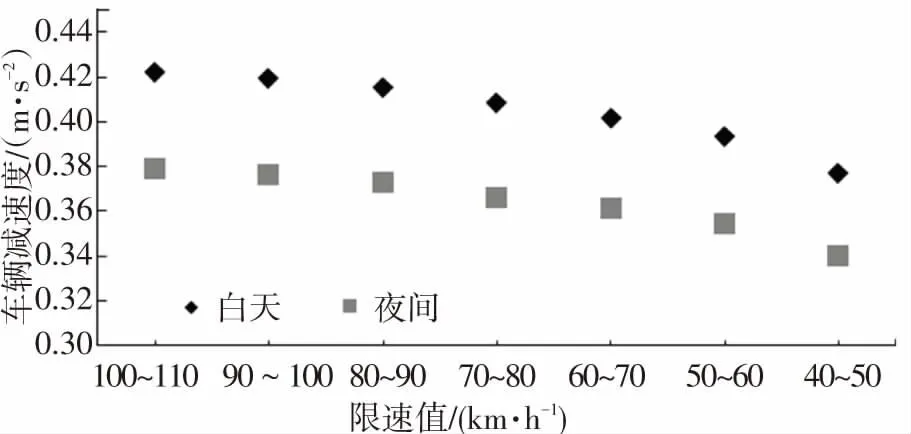
圖10 車輛晝夜平均減速度特性
為了全面保障高速公路改擴建工程安全順利的進行,白天和夜間均應在作業區上游設置限速標志. 若針對白天和夜間分別在路側設置兩套限速標志,這樣會加重駕駛人的視覺負擔,增加駕駛人對標志的視認時間、判斷時間,不僅起不到安全限速的目的,反而會增加事故率. 基于本文的研究結果,由于夜間限速標志設置間距小于白天限速標志設置間距,若只按照夜間限速方案進行設置,不僅能夠保證夜間車輛的安全限速,又能滿足白天行車安全的需求. 由此確定了將夜間限速標志設置方案作為琿烏高速公路吉林至龍嘉機場段高速公路改擴建工程的限速方案并予以應用. 為了進一步驗證限速方案的應用效果,對上述改擴建工程路段各個限速標志所處位置的車輛行駛速度進行了實地采集,車速分布情況如圖11所示,并計算得到各個采集點的車速均值和標準差,見表3. 結果表明:被觀測車輛通過各個限速標志位置處的車速均值基本維持在相應的限速值附近,對應車速標準差為1.3~2.2,說明車速離散性較小,實際車速與期望車速相接近. 由此證實了本文提出的限速方案的實用性和有效性.
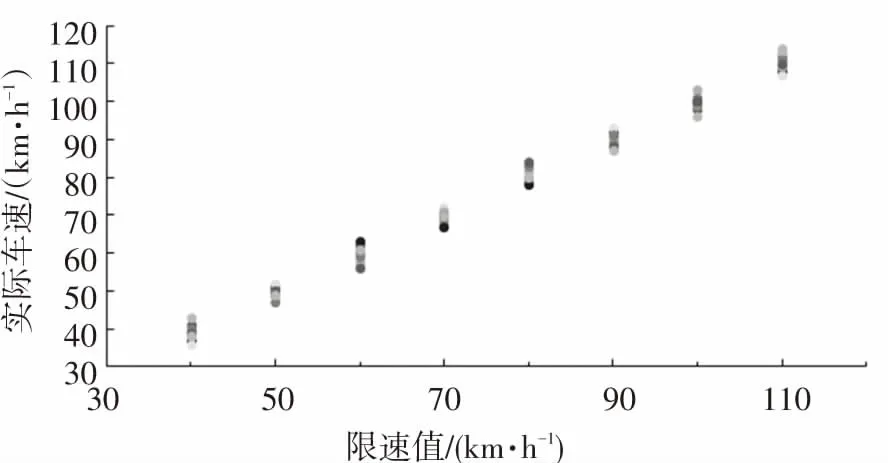
圖11 實際車速與限速值的關系
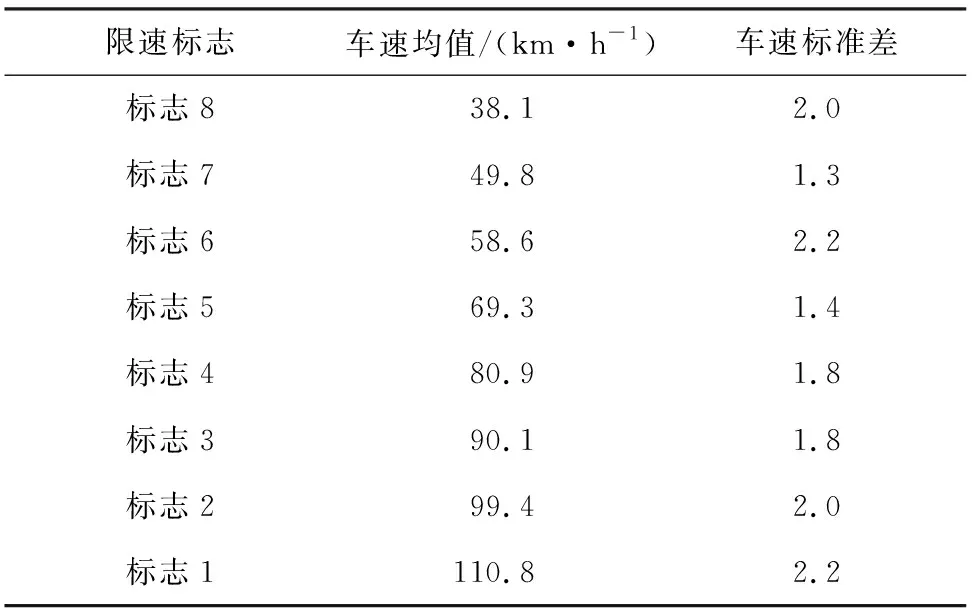
表3 車速均值與標準差
4 結 論
1)基于對駕駛人的視認性分析,研究確定了駕駛人晝夜駕車過程中的視野范圍,構建了駕駛人視認距離計算模型;基于對駕駛人的制動特性分析,構建了限速標志前置距離模型.
2)提出了一種基于駕駛人特性的漸變限速標志間距計算方法,實現了對限速標志間距值的量化分析. 研究結果顯示:隨著限速值的增大,相鄰限速標志設置間距隨之增大,二者呈正線性相關,且夜間設置間距比白天設置間距增幅大,夜間限速標志設置間距大于白天限速標志設置間距.
3)利用基于運動學的計算方法得到了漸變限速標志之間的車輛晝夜平均減速度,分析了車輛逐級減速過程中的平均減速度特性. 研究結果顯示:隨著限速值的減小,車輛晝夜平均減速度隨之減小,二者近似呈正線性相關,且夜間平均減速度小于白天平均減速度.
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
少先隊活動(2021年4期)2021-07-23 01:46:22
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2016年9期)2016-06-06 07:42:10
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
中國艦船研究(2014年5期)2014-05-14 06:43:09
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
