水下地形輔助導航用數字地圖分辨率研究*
2020-09-01 02:08:56徐振烊張靜遠
彈箭與制導學報 2020年2期
徐振烊,張靜遠,饒 喆
(1 海軍工程大學兵器工程學院, 武漢 430033; 2 91991部隊,浙江舟山 316000)
0 引言
慣性導航作為潛艇、水下無人航行器(UUV)、魚雷、自航水雷等潛航器的主要導航定位手段,鑒于其工作原理,導航誤差會隨時間逐漸累積,要實現遠程精確自主導航,必須借助相關輔助手段,水下地形輔助慣性導航可有效降低潛航器的導航定位誤差,增強隱蔽性,提高生存能力,目前該技術已成為世界各國海軍裝備發展的研究熱點[1-6]。利用海底豐富的地形信息,通過相關匹配算法,將測量設備實時測得的地形、水深數據與數字地圖數據庫中的高程數據進行相關匹配運算,推算出當前水下航行器的位置,以修正慣性導航系統誤差[7-9]。目前,國內外針對水下數字地圖的構建、匹配算法等相關研究較多,但針對水下數字地圖分辨率的公開研究相對較少,制約了地形輔助導航性能的更好發揮[10],而數字地圖分辨率又關乎地形匹配精度及效率,分辨率太低無法精確提供地形信息,易造成誤匹配,分辨率過高會占用大量存儲內存,影響計算效率,導航效果不佳[11]。此外,數字地圖是地形的一種數字化表達,選擇適宜的分辨率,對計算機制圖實現高效化、實時化、精確化提供了支持。因此,需要給出較為適宜的地圖分辨率。
文中首先根據真實水深數據,通過雙線性插值法制備了多分辨率數字地圖;而后,基于經典TERCOM匹配算法,對不同地形數字地圖分辨率與匹配誤差的定量關系進行了多項式回歸分析;最后,根據武漢木蘭湖實測水深數據,對二者定量關系進行了仿真驗證,最終給出了水下地形輔助導航用適宜的地圖分辨率。
1 數字地圖模型構建
數字地圖是以數字形式記錄和存儲具有確定位置、屬性等地面要素離散數據的有序集合。由于水下環境較陸上相對復雜,測量難度及工作量較大,圖像高清實時獲取又相當困難,通常選擇地形高程匹配中的數字高程模型(digital elevation model,DEM)來表達水下地形信息。為便于數據的存儲、使用、管理、分析和計算,采用正方形規則格網結構模型[12],如圖1所示。將對象海域按一定格網尺寸進行劃分以形成二維格網結構,X和Y方向上的格網間距相等,該間距稱為數字地圖分辨率對匹配質量及效率有著一定程度的影響。

圖1 正方形規則格網結構DEM模型
受目前技術條件、環境及工作量等方面的制約,水下數字地圖分辨率普遍較低,水深數據相對匱乏,無法滿足地形輔助導航需求。為了研究分辨率對導航定位精度的影響,采用雙線性插值法對原始數據進行了插值處理,得到多分辨率水下數字地圖,以備后續仿真用。選取臺灣海峽東經117.508 3°至東經117.708 1°,北緯21.238 0°至北緯23.104 6°附近海域真實水深數據及武漢木蘭湖實測真實水深數據制作水下地形DEM,如圖2所示。
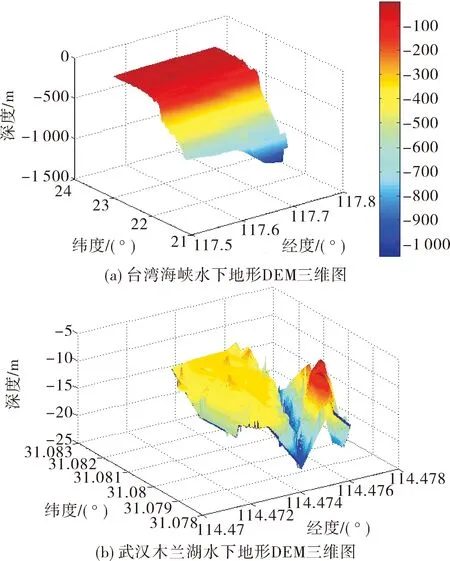
圖2 匹配區地形三維圖
2 TERCOM匹配算法
TERCOM匹配算法實質上是對地形數字高程序列進行斷續批相關處理實現定位,地球表面任何點的地理位置均可依據其周圍地域等高線或地形地貌來單值確定,其基本原理如圖3所示。當潛航器到達預定匹配區時,通過測量設備按一定采樣間隔分別測得潛航器距離海面和海底的距離hr和hl,從而計算得出該處水下地形的絕對深度h,并將其依次緩存,當緩存序列數目達到預設值時,便開始進行匹配相關運算。首先,根據潛航器慣導輸出信息在數字地圖中找到對應區域的地形高程信息,即基準地形數字高程序列;經過既定時間的實時測量,獲得真實地形數字高程序列。而后將這兩種序列按照相關計算標準進行匹配相關分析,確定最佳匹配剖面。最后,根據最佳匹配剖面計算得出潛航器的實際位置偏差,以修正慣導偏差,減小前期系統累積誤差。
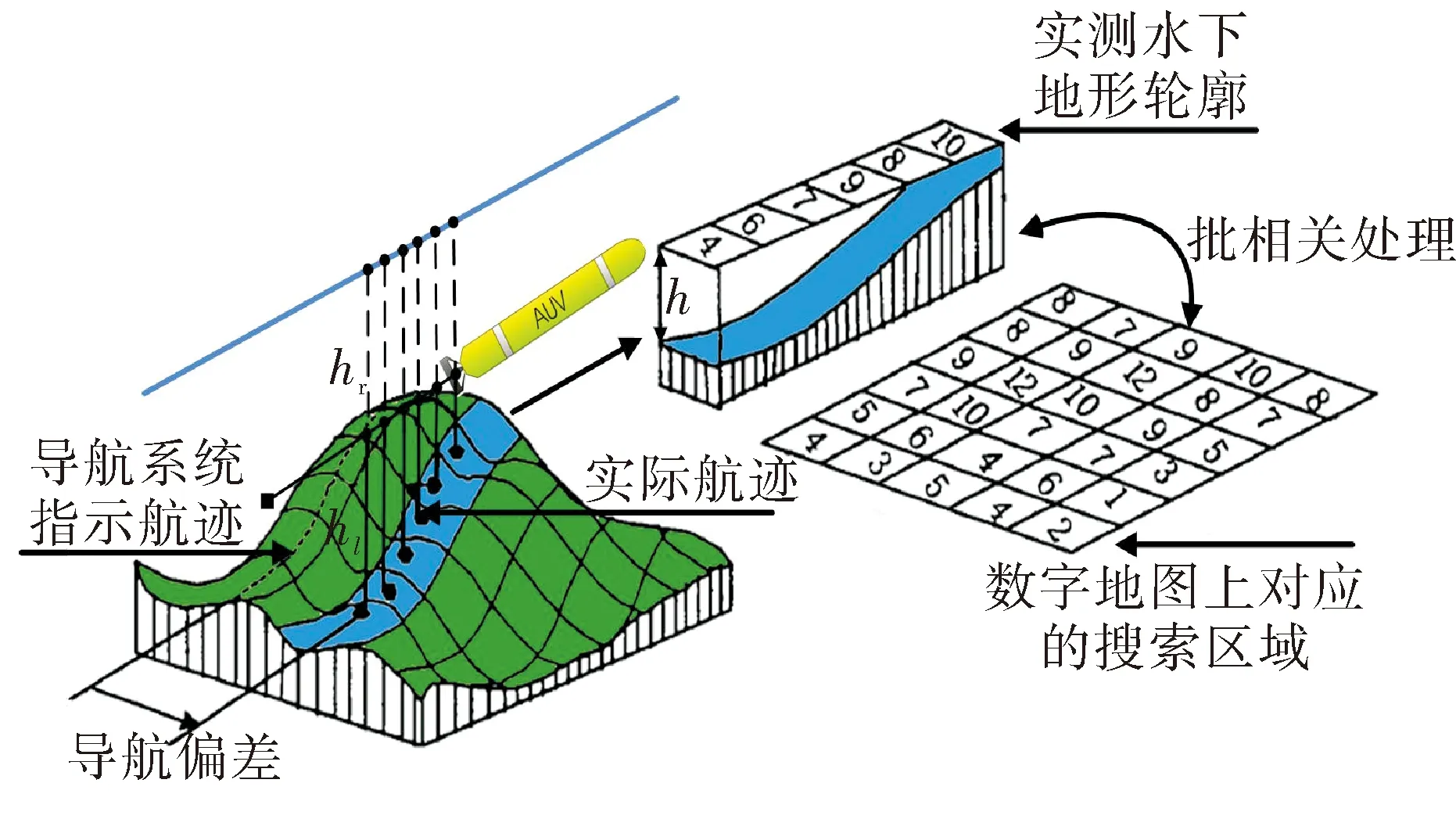
圖3 TERCOM算法原理圖
TERCOM算法常用的相關性計算方法主要有平均絕對差法(mean absolute difference,MAD)、均方差法(mean square difference,MSD)和互相關法(cross correlation,COR)等3種,計算式分別為[10]:
(1)
(2)
(3)
式(1)~式(3)中:JMAD(x,y)、JMSD(x,y)和JCOR(x,y)分別為搜索位置(x,y)處的MAD、MSD和COR值;N為匹配序列長度;hr(i)為第i序列點實時測量水深數據,hm(i)為第i序列點數字地圖基準水深數據。最佳匹配剖面具有最大的JCOR(x,y)值、最小的JMAD(x,y)值或JMSD(x,y)值。以上3種相關算法中,MSD算法匹配精度高于MAD算法,計算量小于COR算法,易于實現,工程中多將MSD算法作為匹配準則。
3 數值仿真分析
3.1 仿真條件設定
TERCOM算法經典、成熟、簡單實用,計算量較小,可以大大縮短匹配計算時間,文中考慮采用該算法對復雜條件下系統匹配性能進行仿真分析。均方根誤差反映了匹配航跡偏離真實航跡的程度,能夠較好地反映匹配效果,以100次蒙特卡洛仿真的均方根誤差及誤差均值作為匹配誤差評價指標,如無特別說明,其他仿真條件設定如表1所示。
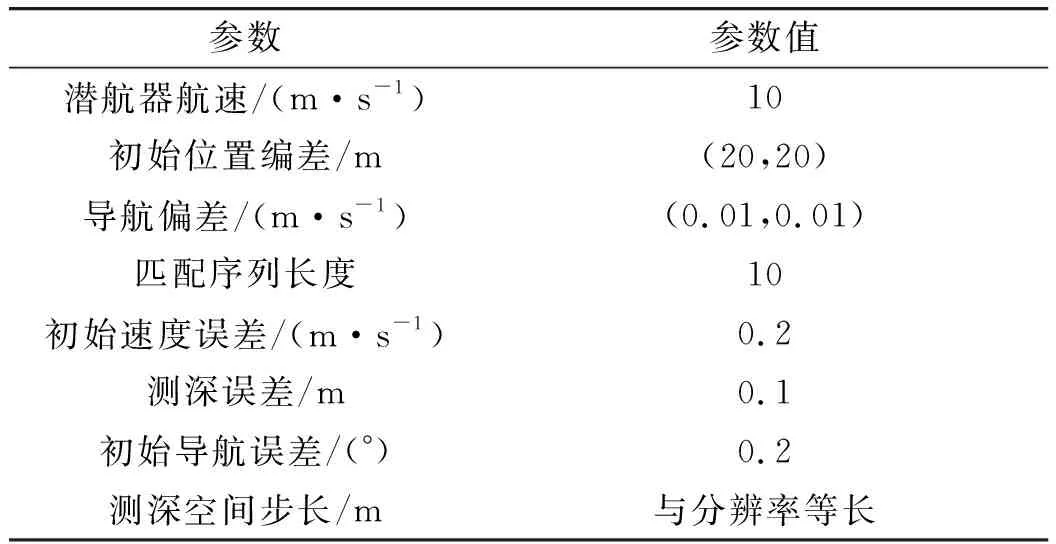
表1 仿真參數設定
3.2 地圖分辨率對匹配誤差的影響
選取臺灣海峽某海域小起伏(或平坦)區為匹配區,匹配航路及對應水下地形如圖4所示,地形起伏較平坦,信息差異性較小。
分別選取分辨率為60 m、30 m、14 m的數字地圖進行仿真分析,匹配結果如圖5所示,誤差均值分別為50.93 m、28.34 m、18.74 m,均方根誤差分別為55.69 m、30.99 m、21.30 m。
從圖5及匹配誤差可以看出,隨著地圖分辨率的提高,匹配誤差隨之降低,符合人們對分辨率與匹配誤差關系的傳統預期和認識。但地形選擇單一,選取的分辨率較少,僅能定性說明匹配性能好壞與分辨率密切相關,要想較為確切的找到其間的某種關系,還需要做進一步的分析。
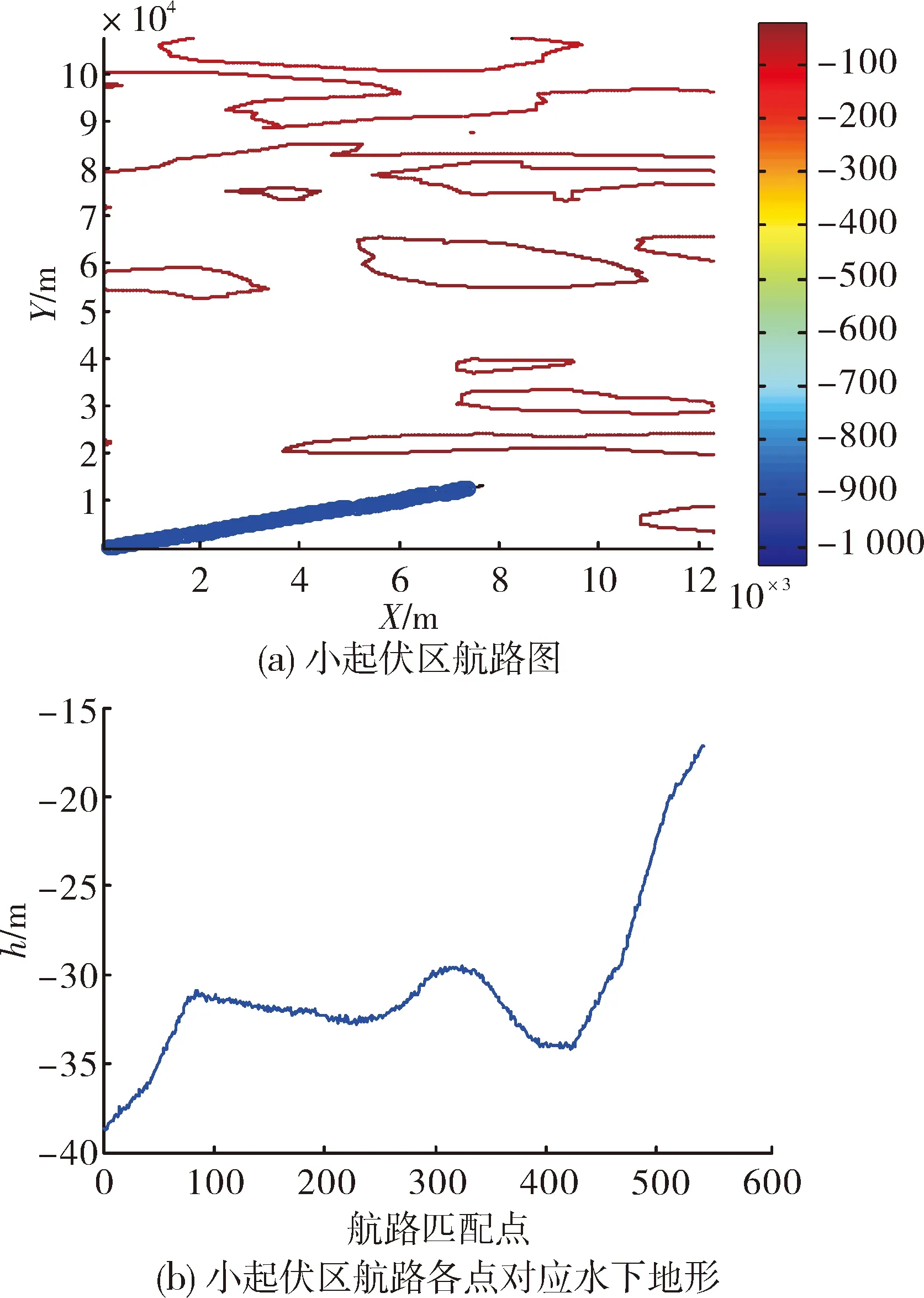
圖4 小起伏區匹配航路及對應水下地形
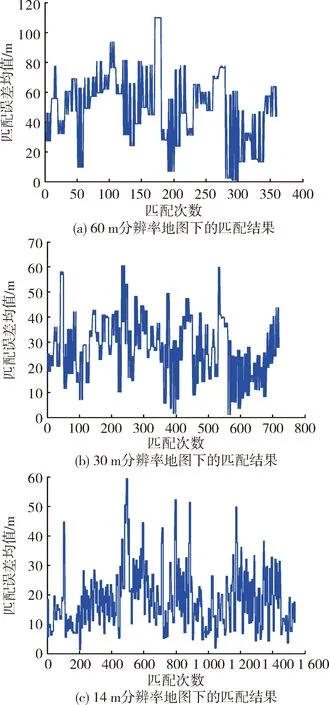
圖5 小起伏區不同地圖分辨率下的匹配結果
3.3 分辨率與匹配誤差的定量分析
數字地圖適宜分辨率的確定依賴于地形特征,不同特征的地形可能對應不同的適宜分辨率。文中在分析時將地形分為小起伏(或平坦)和大起伏兩種,對適宜分辨率分別進行探究。圖6為臺灣海峽某海域大起伏區匹配航路及對應水下地形,為了進一步探究分辨率與匹配結果的內在關系,接下來分別分析圖4、圖6所示的小起伏、大起伏區多地圖分辨率對匹配誤差的影響,地圖分辨率與匹配誤差的回歸關系如圖7所示。
小起伏區擬合曲線方程為:
fS(x)=p1x4+p2x3+p3x2+p4x+p5
(4)
式中:x為地圖分辨率,fS(x)為小起伏區匹配誤差,p1=4.464e-06;p2=-0.001 058;p3=0.079 24;p4=-1.627;p5=32.27。
大起伏區擬合曲線方程為:
fB(x)=p1x5+p2x4+p3x3+p4x2+p5x+p6
(5)
式中:x為地圖分辨率;fB(x)為大起伏區匹配誤差;p1=-1.018e-08;p2=4.517e-06;p3=-0.000 758 9;p4=0.057 99;p5=-1.579;p6=31.45。
從圖7可以看出,地圖分辨率高低直接影響了算法的匹配效果,大起伏匹配區適宜分辨率在25 m左右,小起伏匹配區適宜分辨率在13 m左右。地圖分辨率過高或過低均不利于匹配導航,對于小起伏區,地形信息相對匱乏,分辨率低會導致總匹配長度減小,容易出現較大的誤匹配,因此匹配所需適宜地圖分辨率較高,便于更好的提取地形信息,但是分辨率不可過高,否則會由于地形相似性大而造成誤匹配,影響匹配效果,同時也會占用較大存儲空間,造成資源的格外浪費;而對于大起伏區,地形信息豐富,匹配所需適宜地圖分辨率較小起伏區低。總體來講,地形信息豐富區匹配誤差要比地形信息匱乏區匹配誤差小,匹配效果更好。因此,在輔助導航應用中,盡可能選擇地形信息豐富的水域作為匹配區。
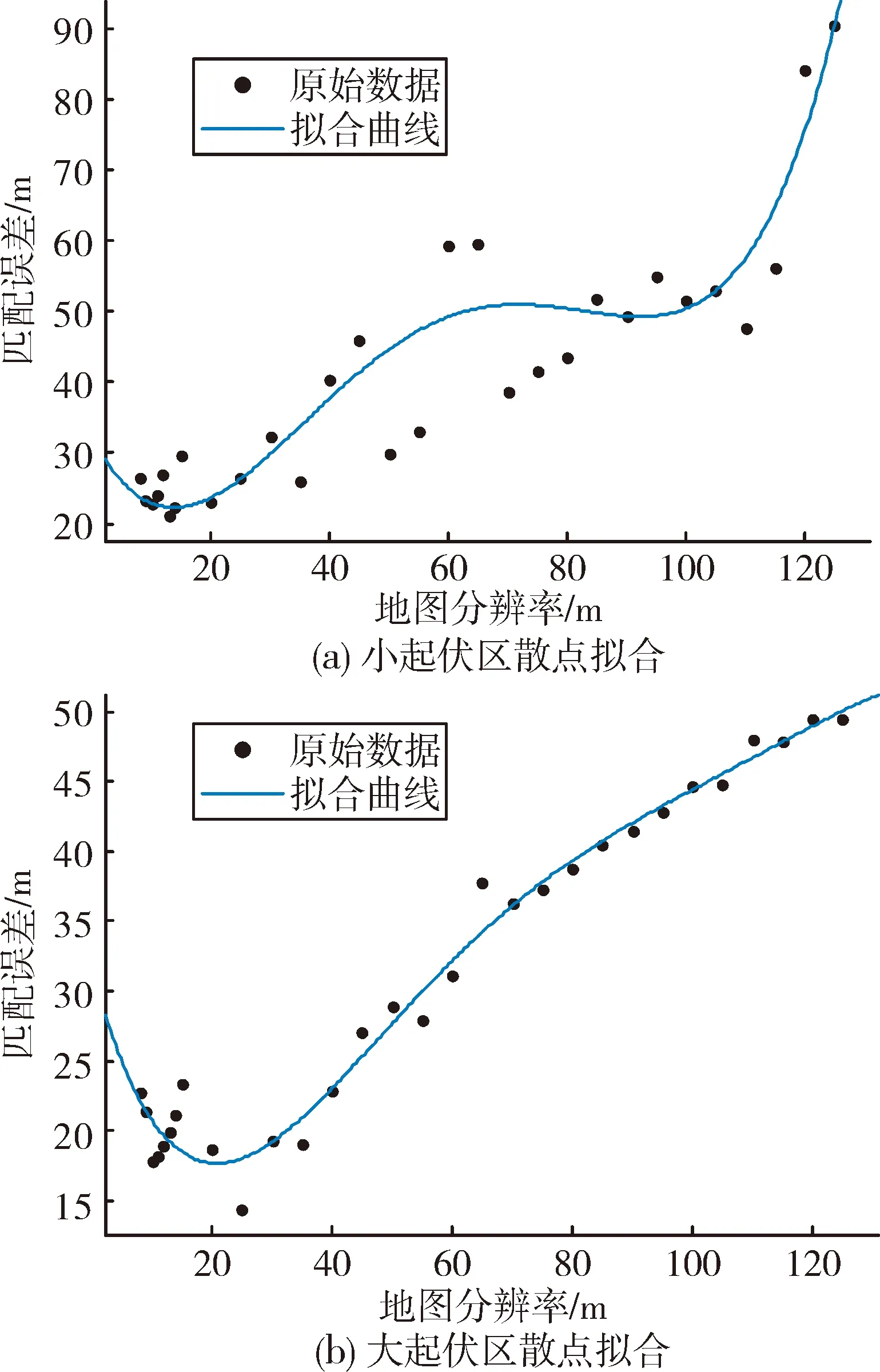
圖7 地圖分辨率與匹配誤差曲線關系
DEM本質上是通過規則柵格單元以數字化的形式來表征實際地形,因此柵格單元的大小(數字地圖分辨率、格網分辨率、DEM水平分辨率)決定了DEM與實際地形的逼近程度。理論上講,分辨率越高,DEM就越接近于實際地形,導航越精確。然而對于實際應用而言,過于追求高分辨率不僅會增加數據處理工作量,而且在實際應用中起不到明顯的改善效果。在地圖分辨率降低的同時,采樣間隔也隨之增加,較大的采樣間隔加大了匹配序列間的深度差異,在提高測量信息信噪比的同時,也有助于避免小范圍相似地形對相關批處理的影響,從而改善了TERCOM算法的匹配效果。
3.4 木蘭湖水域實測數據仿真驗證
為了進一步分析數字地圖分辨率與匹配誤差間的內在關系,選取武漢木蘭湖實測真實水深數據進行仿真驗證。對該水深數據進行雙線性插值處理,得到分辨率為2~20 m、25 m、30 m、40 m的水下數字地圖,以備仿真用。采用TERCOM算法,將100次蒙特卡洛仿真均值作為匹配結果,匹配航路、航路對應水下地形及10 m分辨率下的匹配誤差如圖8所示,不同數字地圖分辨率對應的匹配誤差及其擬合變化關系如圖9所示。
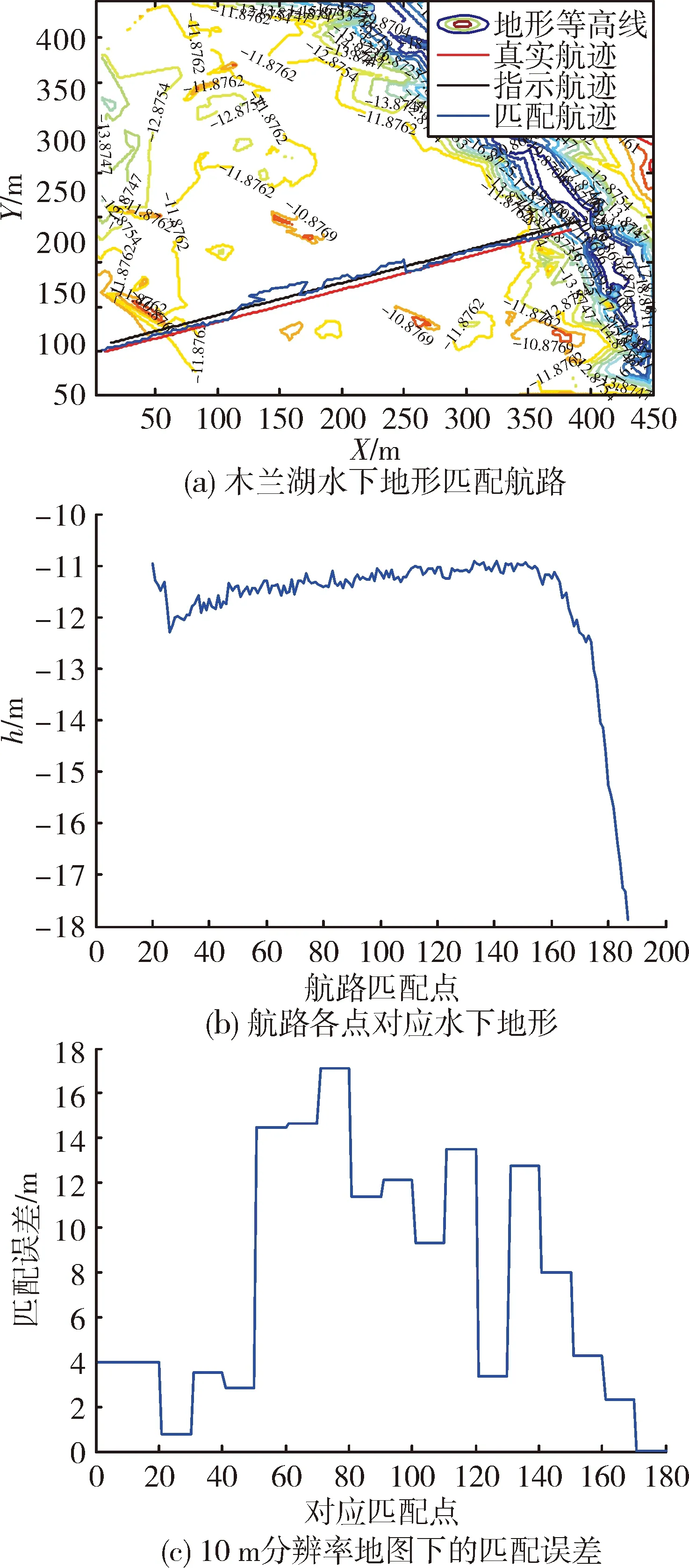
圖8 木蘭湖匹配水域相關匹配結果
從圖9可以看出,匹配誤差在較高分辨率處較大,隨著分辨率降低,誤差均值逐漸減小,當分辨率小于某值時,誤差均值又逐漸增大,設x為地圖分辨率,f(x)為木蘭湖匹配誤差,散點擬合曲線方程為:
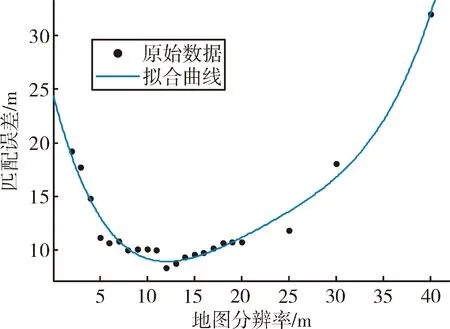
圖9 木蘭湖地圖分辨率與匹配誤差曲線關系
f(x)=p1x4+p2x3+p3x2+p4x+p5
(6)
式中:p1=8.258e-05,p2=-0.007 246,p3=0.246 7,
p4=-3.372,p5=24.67。
仿真結果表明,在分辨率為12~16 m時匹配誤差均值略小于10 m,在分辨率為12 m左右時匹配誤差相對最小,同時,數字地圖分辨率與匹配誤差近似服從多次線性曲線變化規律。該曲線基本反映了匹配誤差與數字地圖分辨率之間的變化關系。因此,可以根據回歸方程分析同一水下地形匹配區域內在不同數字地圖分辨率下的匹配誤差,從而可以對實際應用需求和客觀條件限制進行權衡,選取適宜的數字地圖分辨率。
4 結論
文中以降低水下地形輔助導航誤差為目的,對地圖分辨率開展了相關研究。以TERCOM算法為支撐,導航系統為研究對象,定性分析了數字地圖分辨率對匹配誤差的影響;利用多項式回歸分析法確定了在一定條件下不同特征地形下數字地圖分辨率與匹配誤差的定量關系,并給出了水下地形輔助導航用數字地圖的適宜分辨率。仿真結果表明,小起伏區和大起伏區適宜分辨率分別在12 m和25 m左右,解決了在導航用地圖分辨率選取不明的問題,研究成果可為水下地形輔助導航用數字地圖分辨率選取及國內從事相關工作的研究人員提供參考依據。