基于改進人工勢場法的反輻射無人機搜索航路規劃*
2020-09-01 03:01:44劉培賓盛懷潔
彈箭與制導學報 2020年2期
關鍵詞:規劃
劉培賓,盛懷潔
(國防科技大學電子對抗學院, 合肥 230037)
0 引言
反輻射無人機(以下簡稱無人機)具有“發射后不管”的特點,其搜索航路規劃屬于預先航路規劃,實時性較差,因此在地面階段進行的搜索航路規劃對提高其對目標雷達的搜索壓制效率至關重要。搜索航路規劃的關鍵在于選擇合適的航路規劃算法,人工勢場法自1986年被Khatib[1]提出以來,由于原理簡單、規劃效率高、生成路徑平滑等優點被廣泛應用于無人機的航路規劃領域,如文獻[2]將人工勢場法用于無人機的局部航路重規劃,文獻[3-4]將人工勢場法應用于多無人機的航路規劃。但是傳統人工勢場法也存在許多固有的問題,比如容易陷入局部極小點,存在目標不可達問題[5],在狹窄區域易發生路徑抖動[6]以及在復雜環境中無法準確避障[7]等問題。針對這些問題,研究人員通過對傳統算法進行改進,提出了許多行之有效的解決方法,如修改勢場函數[8]、在搜索過程中加入隨機逃走[9]等策略以及與其它算法相結合[10]等。
為提高無人機對目標雷達的搜索壓制效率,文中以無人機導引頭具有視場約束的特點為切入點,提出了一種基于改進人工勢場法的搜索航路規劃方法。
1 搜索航路規劃問題概述
文中無人機搜索航路規劃問題主要包括約束條件、代價指標等要素,其一般可描述為:在指定搜索區域內,利用改進人工勢場法,規劃出滿足一系列約束條件的使航路規劃代價指標(“視場覆蓋率”)最大的閉合航路,使目標雷達盡可能處于無人機導引頭的搜索視場范圍內。
搜索航路規劃基于分層規劃思想。
1.1 分層規劃思想
根據無人機“發射后不管”以及導引頭具有搜索視場約束的特點,將搜索航路規劃劃分為兩個層次進行:第一層是整體航路規劃,第二層是航路局部優化。
1)整體航路規劃
整體航路規劃是在搜索算法運行之前進行的,將搜索航路規劃問題類比為旅行商問題,從任務執行效率等方面考慮,選擇關鍵航路節點,合理安排各個航路節點的到達順序,實現航路閉合,以便引導無人機更好地對目標雷達實現視場覆蓋。
關鍵航路節點按以下原則選取:
①所選航路節點位于攻擊區(搜索航路規劃區域)內;
②數目至少為2個,但不宜過多;
③保證導引頭搜索波束在地面上的投影盡可能覆蓋目標雷達。
2)航路局部優化
有了關鍵航路節點后,無人機在關鍵航路節點之間,依據威脅信息以及視場約束條件,基于改進人工勢場法,增加航路節點,對搜索航路進行局部優化。
1.2 航路約束條件
無人機搜索航路規劃不僅要兼顧可飛性、安全性等因素,更要滿足任務執行需要。其中可飛性主要指無人機要滿足基本飛行性能的約束,如最小平飛距離、最小轉彎半徑、最大轉彎角等;安全性主要指無人機在飛行時不僅要避開高山等地形障礙,還要規避敵方高炮、地空導彈等威脅;任務執行需要目標雷達盡可能處于無人機導引頭的搜索視場覆蓋范圍內。
1.3 航路代價指標
無人機主要用于執行對敵防空系統的搜索壓制任務,所以在進行航路規劃時主要考慮任務執行需要。
一般,無人機被動雷達導引頭在水平面的方位覆蓋角度為±φ0,在垂直面的俯仰覆蓋角度范圍為β1~β2。導引頭在水平面成功截獲雷達信號的約束條件是:
(1)
式中:Xi為無人機當前的位置;Xi+1為無人機下一時刻的位置;X0為目標雷達的位置。
由于無人機在搜索航段大部分時間是按照某固定高度水平飛行,因此可以將俯仰方向的角度約束條件轉化為距離約束條件,即
(2)
式中:dmin、dmax分別為考慮俯仰最小覆蓋角度β1時的無人機與雷達之間的最小水平約束距離和綜合考慮俯仰最大覆蓋角度β2和導引頭接收靈敏度時的最大水平約束距離。
式(1)和式(2)即為搜索航路規劃的任務約束條件。
最后,定義“視場覆蓋率”W這一航路代價指標作為改進人工勢場法的適應度函數,來衡量無人機對目標雷達的搜索壓制效果,即
(3)
式中:M表示規劃的搜索航路中航路段的總個數;N表示導引頭視場覆蓋目標雷達航路段個數,航路段為航路中相鄰兩航程點組成的線段;Lf(i)表示視場覆蓋航路中第i段航路的長度;L(j)表示第j段航路的長度。
2 基于改進人工勢場法的搜索航路規劃
改進人工勢場法主要通過修改斥力勢場函數來解決目標不可達問題,以及通過引入遺傳算法進行勢場函數參數優化來克服勢場函數參數人為選取的隨機性。
2.1 改進勢場函數模型
引力場勢場函數模型為:
(4)
式中:ρ(X,Xg)為無人機與目標點的距離;k為引力增益系數。
相應吸引力是引力場勢場函數的負梯度:
Fatt(X)=-(Uatt(X))=kρ(Xg,X)
(5)
改進斥力場函數模型為:
(6)
式中:ρ(X,X0)為無人機與障礙之間的距離;ρ0為障礙的影響距離;η為斥力增益系數。
相應排斥力是斥力場勢場函數的負梯度:
Frep(X)=-
(7)
式中:
(8)
則無人機受到的合勢場及合力分別為:
U(X)=Uatt(X)+Urep(X)
(9)
F(X)=-(U(X))=Fatt(X)+Frep(X)
(10)
于是,無人機在人工勢場合力F(X)的作用下,向著目標點的方向移動。
式(6)的改進斥力場函數模型中增加了調節因子ρ2(X,Xg),使無人機當靠近目標點的時候,在吸引力減小的同時,排斥力隨之減小,直到無人機到達目標點,吸引力和排斥力減至零,從而可以解決傳統人工勢場法中,在障礙物與目標點過于接近引起的斥力勢場和引力勢場同時增大而出現的目標不可達問題。
勢場函數確定后,下一步需要根據實際情況合理設置勢場函數參數的數值,使合力函數引導無人機成功避障到達目標點。為克服勢場函數參數人為選取的隨機性,文中利用遺傳算法來對勢場函數參數進行優化來尋求全局最優解,實現成功避障、目標可達。
2.2 基于遺傳算法的參數優化
利用遺傳算法進行參數優化時,主要對以下步驟進行改進:
1)染色體編碼。染色體編碼就是將問題的有效解表示出來,這里選擇引力增益系數k、斥力增益系數η、障礙物的影響距離ρ0、移動步長γ(設定無人機勻速前進)4個參數按順序編成一個數組作為一個染色體,即
xi=(xi1,xi2,xi3,xi4)
(11)
式中:xi1=k,xi2=η,xi3=ρ0,xi4=γ,i=1,2,…,n,n為種群規模。
2)適應度函數計算。適應度函數計算是確定不同染色體即可行解優劣程度的關鍵,也是基于遺傳算法參數優化的核心,可以根據不同的任務要求設置不同的適應度函數。
2.3 改進人工勢場法算法步驟
基于改進人工勢場法的搜索航路規劃算法步驟為:
步驟1 仿真參數初始化;
步驟2 染色體編碼;
步驟3 產生初始種群;
步驟4 調用人工勢場算法根據式(10)的合力函數產生n條從起點到終點的滿足約束條件的航路,并根據式(3)計算每條航路的適應度函數;
步驟5 選擇適應度高的染色體,交叉、變異產生新種群;
步驟6 循環操作步驟5,直到代數滿足設定的最大遺傳代數Gmax;
步驟7 算法結束,輸出搜索航路。
3 仿真實驗
3.1 改進人工勢場法
首先驗證改進人工勢場法的正確性。
仿真環境設置:航路起點為(0,0),終點為(10,6),規劃空間中有8個圓形障礙,以路徑最短為航路優化指標。
實驗一:k=42,η=100,ρ0=3,γ=1 ,傳統人工勢場法仿真結果如圖1,基于改進勢場模型的人工勢場法仿真結果如圖2。
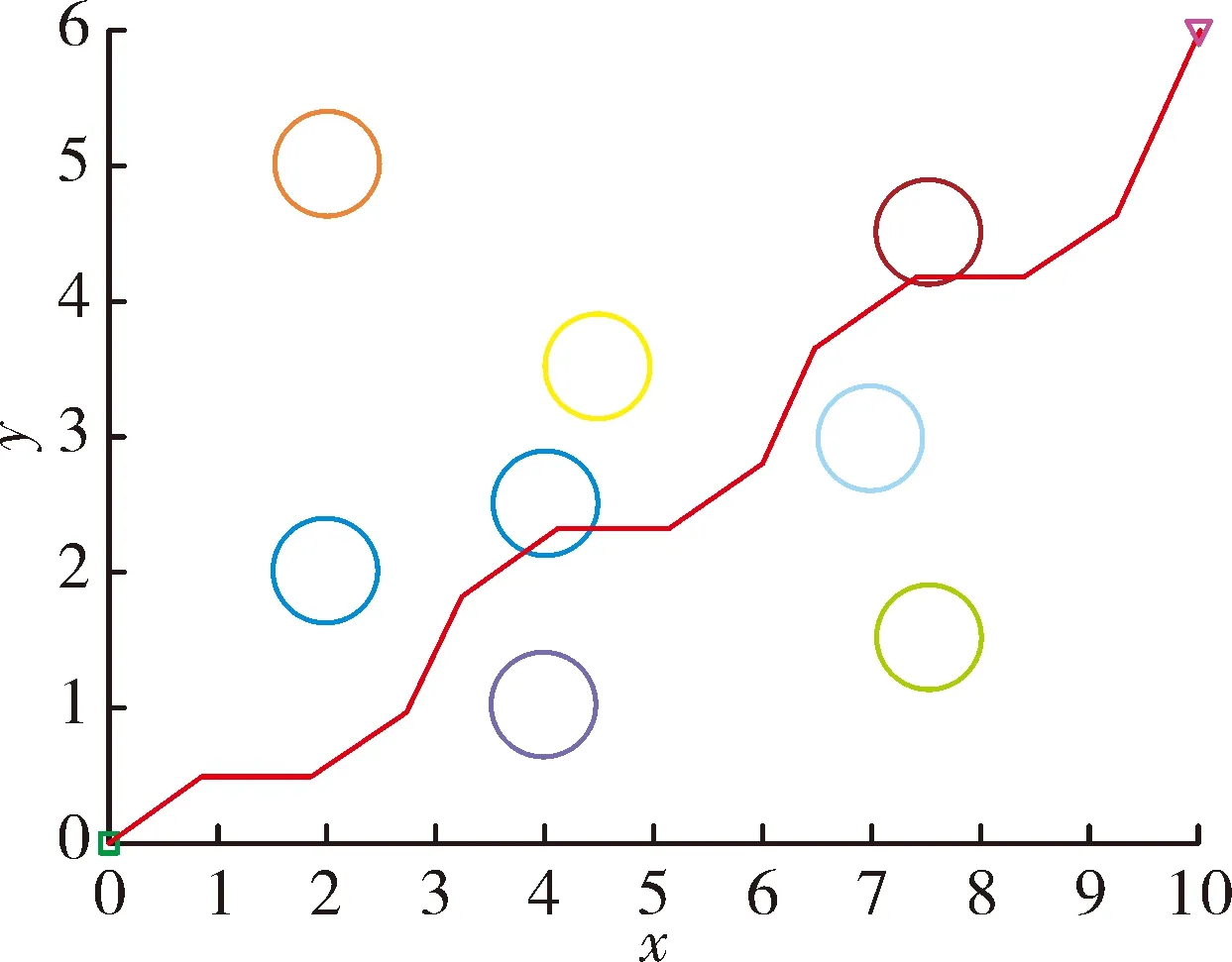
圖2 基于改進勢場模型的人工勢場法航路規劃
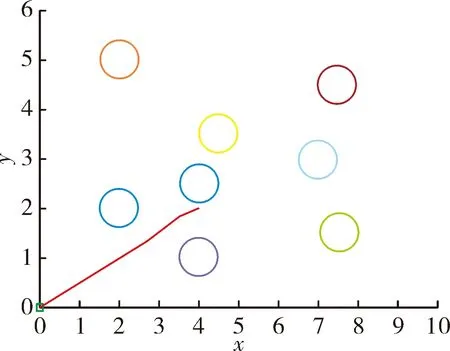
圖1 基于傳統人工勢場法航路規劃
實驗二:種群規模n=200,交叉概率pc=0.7,變異概率pm=0.3,Gmax=50,基于遺傳算法參數優化的改進人工勢場法仿真結果如圖3。
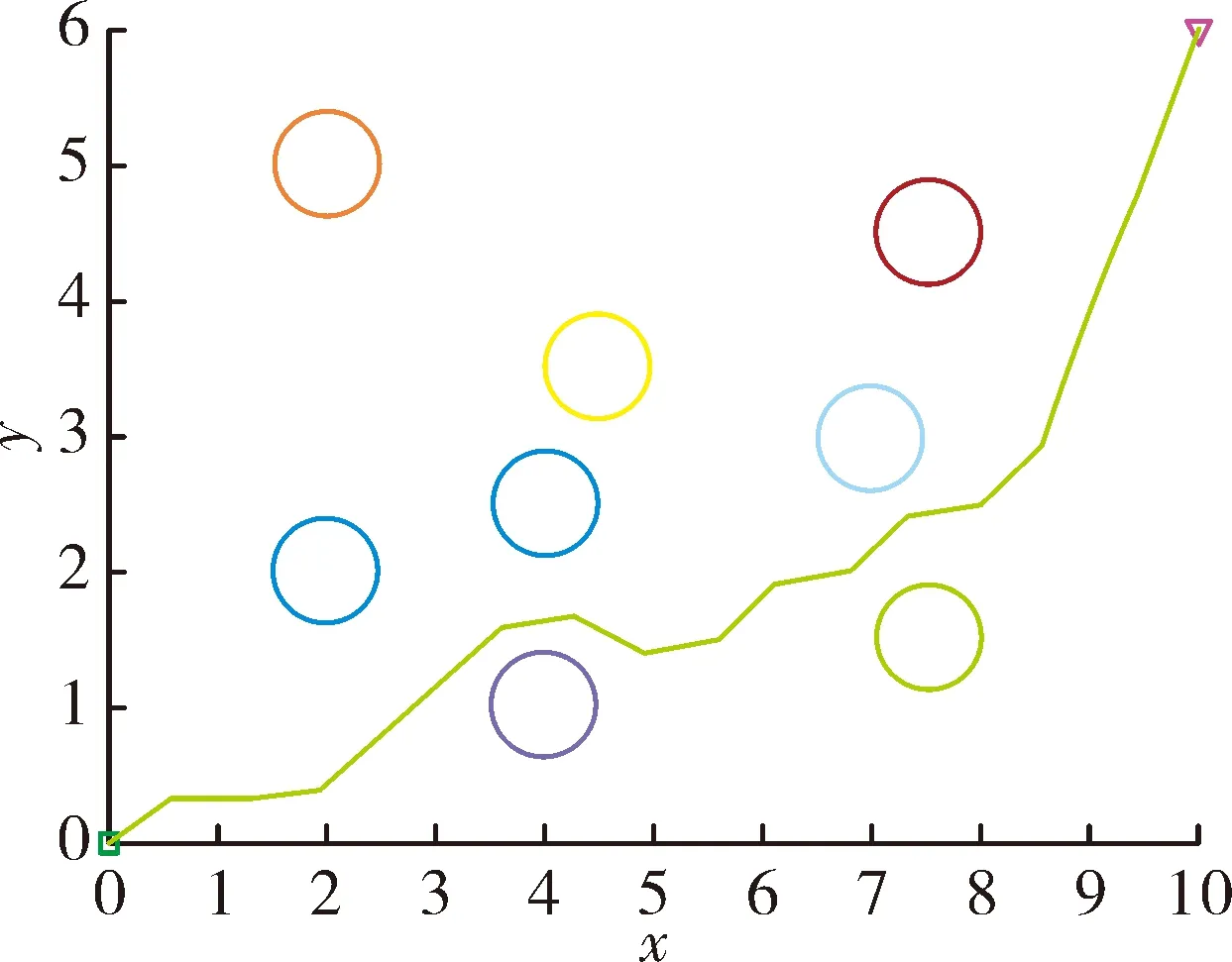
圖3 基于遺傳算法參數優化的改進人工勢場法航路規劃
從仿真結果看,傳統人工勢場法在復雜的環境下存在目標不可達的現象,基于改進勢場函數模型的人工勢場法雖然目標可達,但是由于勢場函數參數選擇不當導致無法準確避障,而基于遺傳算法參數優化的改進人工勢場法不僅目標可達而且準確避障,從而驗證了改進人工勢場法的正確性,下面將該算法應用于無人機的搜索航路規劃中。
3.2 基于改進人工勢場法的搜索航路規劃
接下來基于分層規劃思想,利用改進人工勢場法進行無人機的搜索航路規劃。
仿真環境設置:仿真在12×12的環境中進行,作戰目標為位置固定的單目標雷達,坐標為(5,5),規劃區中有4個圓形禁飛區。
被動雷達導引頭參數:φ0=π/3,dmin=1,dmax?12;遺傳算法參數:n=200,pc=0.9,pm=0.05,Gmax=50。由于在計算視場覆蓋率W時,移動步長γ越小,計算結果越精細,故采用無人機的最小平飛距離作為移動步長,這里取γ=0.5,遺傳算法只對k、η、ρ0進行優化。
仿真根據1.1的分層規劃思想分為兩步進行,第一步整體航路規劃,即選擇關鍵航路節點,此次仿真實驗選擇(0,6),(8,6)兩個關鍵航路節點,此時閉合航路為(0,6)→(8,6)→(0,6);接下來進行第二步航路局部優化,首先生成(0,6)→(8,6)航段的搜索航線,如圖4,其W1=4/8.006 3=49.96%;最后生成(8,6)→(0,6)航段的搜索航線,如圖5,其W2=13.633 5/24.012 2=56.78%;則整體搜索航路視場覆蓋率W=55.07%。
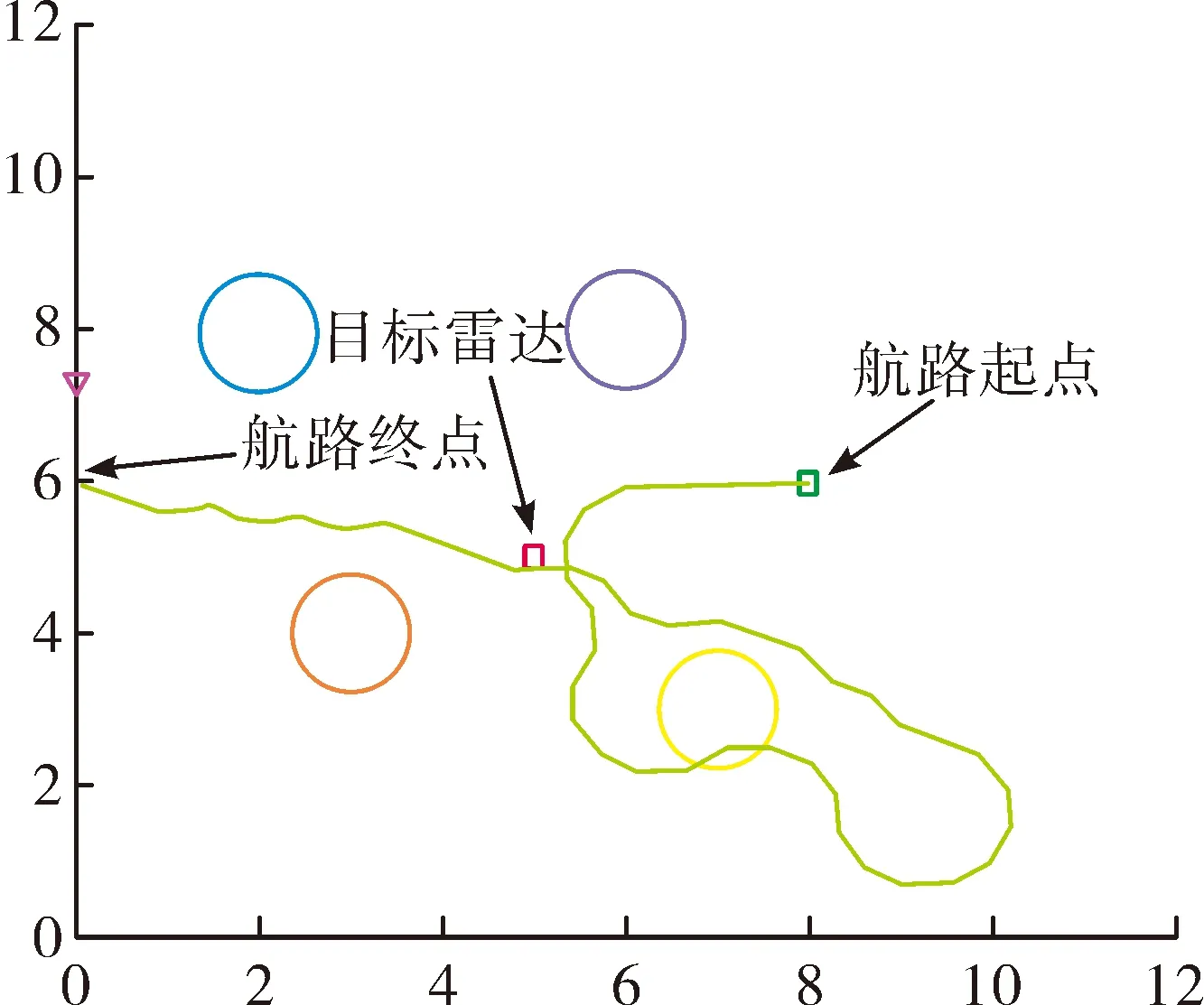
圖5 (8,6)→(0,6)航段的搜索航線
從搜索航路規劃結果來看,運用改進人工勢場法進行無人機的搜索航路規劃,不僅能夠準確避開禁飛區,而且視場覆蓋率遠大于傳統搜索航路的視場覆蓋率(在規劃空間大小相同的情況下,視場覆蓋率均低于35%)[11]。此航路在滿足可飛性、安全性等基本要求的前提下,能夠實現對目標雷達較長時間的視場覆蓋。
4 結束語
無人機的搜索航路規劃是一個復雜的多約束性非線性優化問題,這要求規劃出的搜索航路不僅安全、可飛,還要滿足導引頭搜索視場約束。針對此問題,文中基于分層規劃思想,利用改進人工勢場法進行搜索航路規劃。其中改進人工勢場法主要通過修改斥力勢場函數來解決目標不可達問題,以及通過引入遺傳算法進行勢場函數參數優化來克服勢場函數參數人為選取的隨機性。仿真結果表明,基于改進人工勢場法的搜索航路規劃輸出的搜索航路不僅安全、可飛,還能解決傳統搜索航路視場覆蓋率較低的問題,有助于提高無人機對目標雷達的搜索壓制效率。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41