基于ADAMS的無人機空中發射動力學仿真及分析*
2020-09-01 02:08:56張少江童小燕姚磊江
彈箭與制導學報 2020年2期
張少江,童小燕,姚磊江 ,張 偉
(1 西北工業大學無人機特種技術國防科技重點實驗室, 西安 710072; 2 西北工業大學航空學院, 西安 710072)
0 引言
無人機空中發射技術是指利用其它載體平臺(飛機、導彈等)將無人機攜帶至空中,利用載體平臺本身的飛行速度實現無人機與載體的分離以及無人機的自主飛行[1-2]。空中發射這一技術可以達到擴大作戰半徑以及實現高機動發射無人機的目的。
與現有的發射方式相比,空中發射具有發射時間短、響應速度快、發射效率高和隱身性能好等一系列優點。且空中發射蜂群無人機的效果更加突出。因此,世界各國都在積極努力研制相應的無人機空中發射技術。2014年11月7日,DARPA發布“分布式機載能力”信息征詢書,對大型運輸機/轟炸機發射回收無人機的可行性展開評估。DARPA希望開展相關概念驗證,并計劃引入此前“自主高空加油”(AHR)和“戰術偵察節點”(TERN)等項目成果,由此誕生“小精靈”(Gremlins)項目[3]。
基于多體系統動力學理論,將無人機與發射系統都簡化為多剛體系統,聯合應用CATIA、ADAMAS建立載機模型、無人機模型以及發射系統模型,對無人機的發射過程進行動力學仿真,并分析了空中發射方案的可行性。
1 無人機空中發射系統
無人機空中發射系統如圖1所示。按照其結構特點可以分為旋轉發射架和無人機兩大部分。發射架主要由發射支架、旋轉機構、旋轉軸組成,發射支架是整個發射系統的主要承力構件,旋轉機構可以在旋轉軸上進行旋轉。
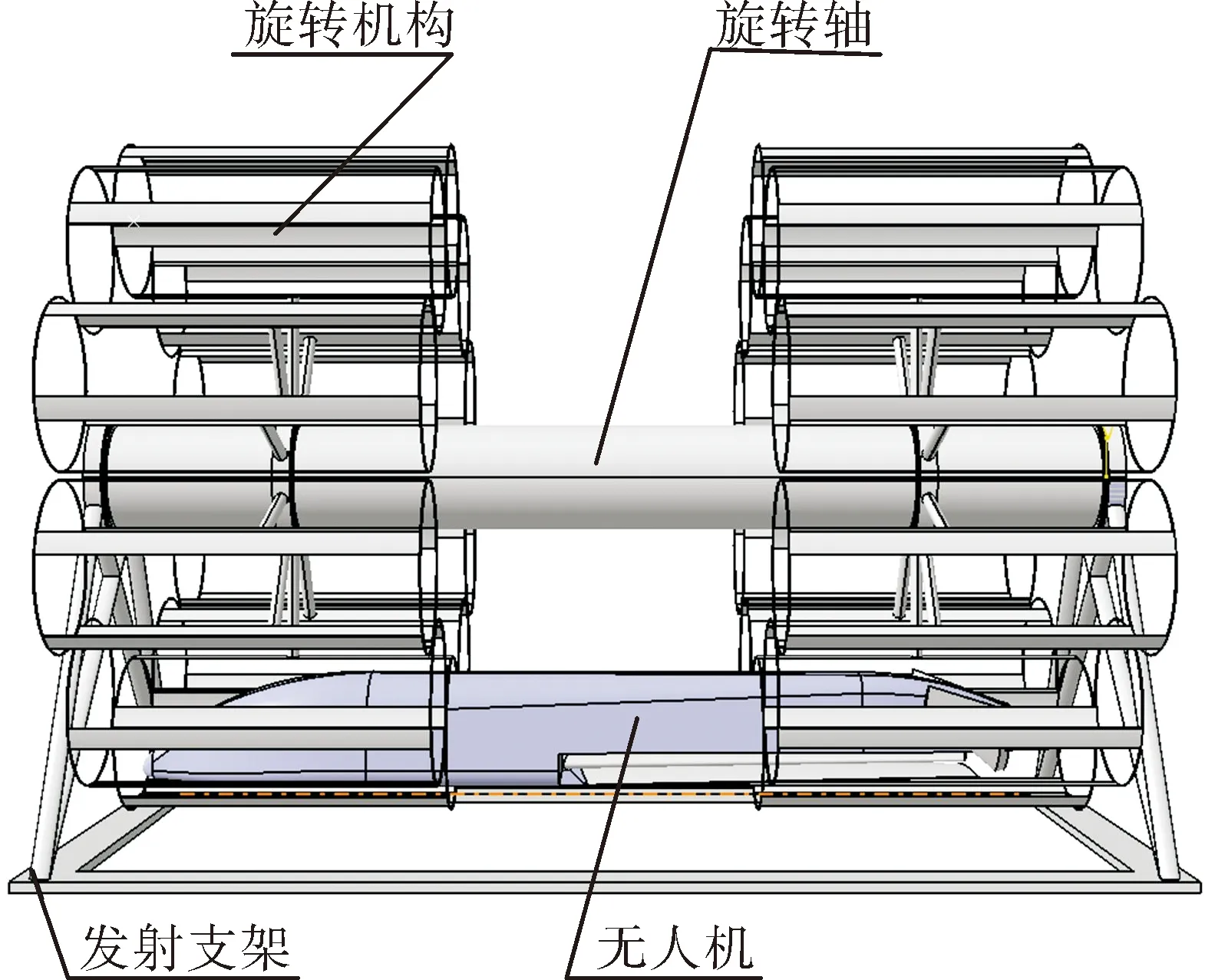
圖1 無人機空中發射系統組成圖
發射方式為旋轉式間歇發射,發射位置位于發射架中心最低位置處,第一架無人機發射完成后,旋轉機構旋轉36°,再將第二架發射出去。
2 仿真模型
2.1 模型的假設
為了問題研究的需要,以下的仿真分析都是基于下面的假設進行的[6]:
1)將無人機和發射架作為剛體,在運動過程中,形狀、質量、質心都不發生改變;
2)忽略振動問題,對無人機和發射架以及載機間的振動不予考慮。
2.2 導入模型及添加約束
將無人機、發射架以及載機在CATIA中裝配為一個整體后,導入ADAMS中,在ADAMS中對模型進行簡化處理,建立動力學仿真模型。將載機、無人機以及發射架均作為剛體處理。添加約束條件, 將發射架與載機作為一個整體,假設其不可動,用固定副連接;旋轉機構與發射架之間有旋轉關系,是旋轉機構繞旋轉軸旋轉,用旋轉副連接;無人機相對于發射架以及載機有移動關系,用移動副連接。
初步設計時,載機飛行高度為3 km,速度為102 m/s,無人機發射方式采用彈射發射。根據文中研究重點,假設仿真過程中載機固定不動,只有發射架的旋轉運動和無人機的分離運動。
2.3 建立空中發射動力學方程
1)多體系統動力學的建模方法
多體系統動力學研究問題的難點之一便是建模方法。從20世紀60年代以來,對于多剛體系統,航天和機械兩大工程領域分別根據各自所研究的對象特點提出了兩種不同的建模方法,但主要區別在于對剛體位形的描述上。
航天工程領域[5]將系統內每個鉸鏈所連接的一對剛體作為一個單元,將其中一個剛體作為參考體,另一個剛體相對于此參考體的位形由鉸鏈的拉格朗日坐標(即廣義坐標)來表述。這樣整個樹系統的位形就可以由所有鉸鏈的拉格朗日坐標矩陣q決定。整個系統的動力學方程為拉氏坐標矩陣的二階微分方程組,即:
這種建模方法的優勢是方程個數極少, 但缺點也非常明顯,方程組中的方程都是嚴重的非線性方程,A和B矩陣的形式也非常復雜,在對其整個方程組進行程式化時需要包括表示系統拓撲的信息。而對于非樹形系統,對約束方程需要求解。在約束反力需要求解出的系統中,這種形式反而具有局限性。一般將這種建模方法稱為第一類方法。
機械工程領域[4]是將系統中的每一個零件作為一個單元,在每個剛體上建立固連在其上的坐標系,則剛體的所有位形均可以相對于一個公共參考基來進行定義,位形坐標一般有6個,且都為剛體坐標系中基點的笛卡爾坐標與坐標系的姿態坐標。但整個系統中存在鉸,則這些位形坐標通常都不獨立,其整個系統的動力學方程形式通常為:

其中:φ為位形坐標矩陣q的約束方程;φq為約束方程的雅克比矩陣,λ為拉氏乘子。
上式是一個維數非常巨大的代數-微分混合方程組。但在一般情況下,方程組系數矩陣零元素都比較多,所以矩陣一般都具有稀疏性。在計算時可以利用其矩陣呈現稀疏性的特點進行簡化后的數值計算,從而可以大大提高計算效率。一般把此種建模方法稱為第二類方法。
2)動力學方程的建立
在動力學仿真軟件ADAMS的建模中,一般采用的是第二種方法。將每個剛體i的質心笛卡爾坐標和表示剛體方位的歐拉角(或廣義歐拉角)作為廣義坐標,即:
采用拉格朗日乘子法建立系統運動方程:

完整約束方程時:f(q,t)=0

3 空中發射仿真結果與分析
在ADAMS/View中建立約束,添加各種連接。給予無人機一個初始速度,并驗證模型正確性。在ADAMS中建立測量,本次測量主要包括無人機質心的位移以及無人機機頭頂點與載機貨艙下艙面之間的距離。本次仿真,結束時間為5 s,仿真步數為500。
3.1 無人機空中發射仿真結果
本次仿真方案中,無人機空中發射時無人機與載機的分離運動可以簡化看作是類平拋運動,在仿真中做簡化處理,給無人機x向初速度為35 m/s,其余方向速度分量為0,讓其只受重力完成仿真過程。其具體仿真的測量結果如圖2~圖4所示。
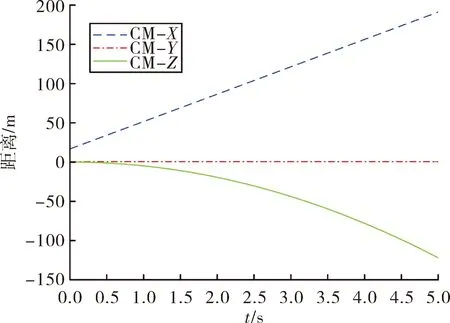
圖2 無人機質心位移曲線

圖3 無人機機頭頂點到貨艙艙面垂直距離變化曲線
3.2 仿真分析
從仿真結果來看,無人機出載機貨艙過程中無人機機頭頂點與載機貨艙下艙面均在安全范圍之內,無人機在0.19 s出艙,而圖4與零線交點在0.196 s,此時無人機已經安全出艙,故無人機不會與載機貨艙或者輔助貨橋等設備發生碰撞,從仿真動畫也可以驗證此點。因此無人機可以安全與載機分離。

圖4 圖3前0.2 s細節圖
4 結論
利用三維建模軟件CATIA聯合動力學仿真軟件ADAMS建立了載機、無人機和旋轉發射架的虛擬樣機模型,并對無人機和載機的分離過程進行了動力學仿真分析。在假設的初始條件下,無人機可以安全與載機分離。仿真結果表明:這種內裝式的無人機空中發射方案不僅可以實現無人機與載機的可靠、安全分離,而且為大型運輸機空中發射無人機和空中發射蜂群無人機的總體方案的可行性論證提供了重要的論證依據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19