典型空中目標動態RCS特性仿真研究*
2020-09-01 02:08:54溫包謙張濟眾
彈箭與制導學報 2020年2期
溫包謙,王 濤,成 坤,張濟眾
(1 火箭軍工程大學, 西安 710025; 2 火箭軍裝備部, 北京 100085)
0 引言
雷達目標的散射特性包括靜態和動態兩方面,在作戰應用研究中動態散射特性具有更高的實際應用價值。獲取目標的動態散射特性有外場動態測量和計算機仿真計算兩種方式[1]。由于外場動態測量結果能準確反映目標的實際散射特性,因此世界各軍事強國都很重視對目標特性測試場的建設與發展[2]。但由于外場動態測量場地要求和成本高,因此計算機仿真成為獲取目標動態RCS特性的常用方法。
文獻[3]根據運動姿態角變化和縮比模型的靜態測量數據,獲得了彈道導彈的動態RCS,但模型的精確度無法保證,從而影響了靜態RCS準確性。文獻[4]以典型目標F-117為研究對象,通過前期電磁散射特性仿真計算獲得目標全空域靜態RCS數據庫的基礎上,采用準靜態法對目標機動時的動態RCS特性進行了仿真分析,為隱身飛機機動突防提供了仿真理論和實驗依據,但只是對不同航路捷徑下的動態RCS進行研究,沒有對變化航跡下的RCS進行研究。文獻[5]基于FEKO軟件仿真計算戰斗機的RCS,為戰斗機的論證、設計和應用提供了數據依據,具有重要的現實意義,但只是分析了目標靜態RCS,研究具有一定的局限性。
文中基于目標實際尺寸建立了精確的目標電磁計算模型,然后獲得了目標全空域靜態RCS數據庫;依據目標的運動學特性,仿真了目標的不同飛行航跡;最后將航跡仿真結果和靜態RCS數據結合起來,研究了典型空中目標動態RCS變化,得到不同目標在不同運動狀態下的散射特性。
1 常用坐標系及相互轉換
1.1 常用坐標系定義
1)雷達坐標系(n系XnYnZn系)
雷達坐標系一般以測量的雷達為坐標原點,并以正北方向為Xn軸,正西方向為Yn軸,垂直向上為Zn軸。
2)機體坐標系(b系XbYbZb系)
機體坐標系是固連在機體上的坐標系。機體坐標系的坐標原點位于飛行器的重心處,Xb沿機體縱軸指向前,Yb沿機體軸線指向右,Zb軸垂直于OXbYb,并沿飛行器的豎軸指向上,如圖1所示。機體坐標系相對于雷達坐標系的方位為目標的姿態角。
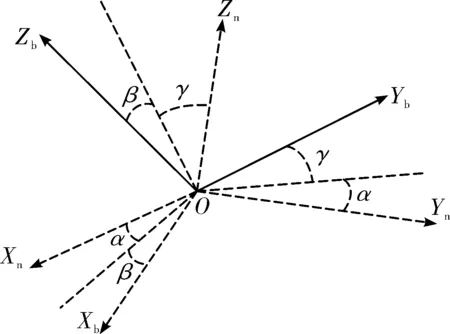
圖1 雷達坐標系與機體坐標系的位置關系
目標姿態角定義如下:航向角α、俯仰角γ和橫滾角β,構成了目標姿態角。α為目標縱軸OXb在XnOYn平面的投影與OXb軸的夾角,γ為目標縱軸OXb與XnOYn平面的夾角,β為XnOYn平面與包含OXb軸的鉛垂面之間的夾角。由航向角α、俯仰角γ和橫滾角β可完全確定目標在運動過程中姿態的變化[4]。
1.2 坐標轉換公式推導
如圖1所示,把雷達坐標系轉換到機體坐標系:首先,OXn和OYn繞OZn轉動α(目標航向角),使OXn與OXb在過原點水平面上的投影相重合;然后,OXn轉過α角度后,在鉛垂面內再繞轉過α角度后的OYn轉動γ(目標俯仰角)與OXb相重合;最后,已轉過角度α后的OYn繞OXb轉動β(目標橫滾角)與OYb相重合。

(1)
2 空中目標動態RCS值計算
2.1 動態RCS仿真方法
空中目標機動過程中的RCS值計算步驟主要包括:航路生成、姿態角解算和RCS值計算3個過程,如圖2所示。首先獲取目標在雷達坐標系中的實時位置、速度和飛行姿態角;然后,通過坐標系變換實現姿態角解算,確定雷達視線在機體坐標系中的時變姿態角;最后,利用得到的姿態角結合目標靜態RCS序列計算目標的RCS值。
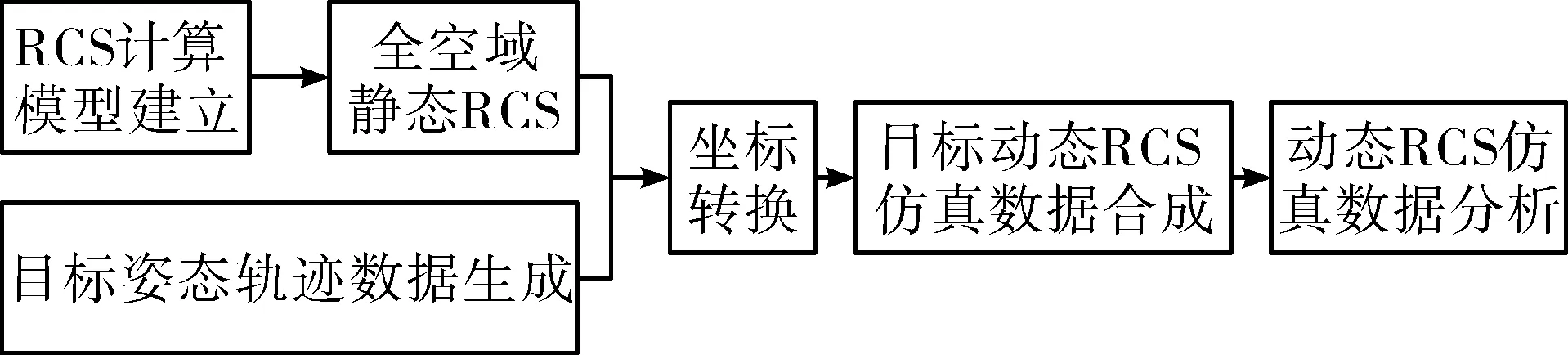
圖2 目標動態RCS仿真流程
2.2 構建目標全空域靜態RCS數據庫
目標全空域靜態RCS數據是雷達目標動態RCS計算的基礎,文中利用FEKO軟件獲取目標全空域靜態RCS數據。具體步驟如下:
Step1:以BGM-109戰斧巡航導彈和F-16戰斗機為對象,根據目標實際尺寸用SolidWorks構建典型空中目標三維模型,如圖3所示;
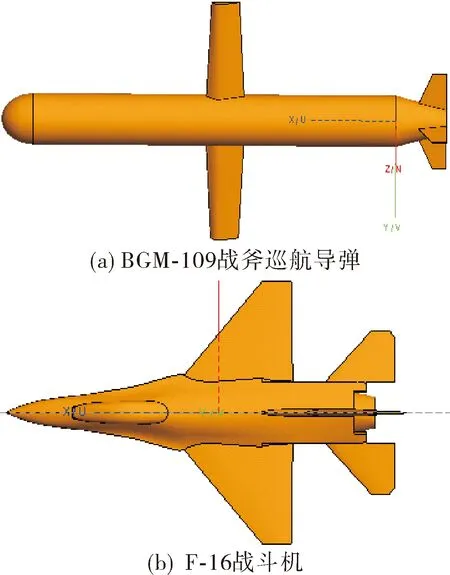
圖3 來襲目標三維模型
Step2:將目標三維模型(BGM-109戰斧巡航導彈或F-16戰斗機)導入FEKO電磁仿真軟件,并對模型進一步做網格剖分;
Step3:依據防空武器系統中搜索雷達工作參數,設置雷達的工作頻率為3 GHz、入射波的方位角0°~360°、俯仰角-90°~90°、極化方式為水平極化等參數,對來襲目標進行全空域電磁仿真;
Step4:將仿真結果以.txt格式的文件導出并保存;
Step5:構建BGM-109戰斧巡航導彈和F-16戰斗機的全空域靜態RCS數據庫,便于后續根據仿真實際進行插值調用。
2.3 雷達姿態角解算
利用FEKO軟件獲取的目標靜態RCS數據庫,包含雷達測量的方位角、俯仰角等數據[7]。通常,目標視向角度下的RCS數據才能客觀描述運動目標的散射特性,視向角度即機體坐標系下雷達的相對角度,因此在動態RCS計算中通常需要進行坐標系的轉換,才能得到機體坐標系視向角對應的RCS值。
雷達姿態角是指雷達入射波在機體坐標下相對于目標的方位和俯仰夾角,包括雷達視線方位角和雷達視線俯仰角[8],如圖4所示,雷達方位角φ為飛機視線方向在水平面上的投影與X軸的夾角,φ[0°,360°];雷達俯仰角θ為飛機視線方向與水平面的夾角,θ[0°,180°],距離R為目標到測量雷達的距離。
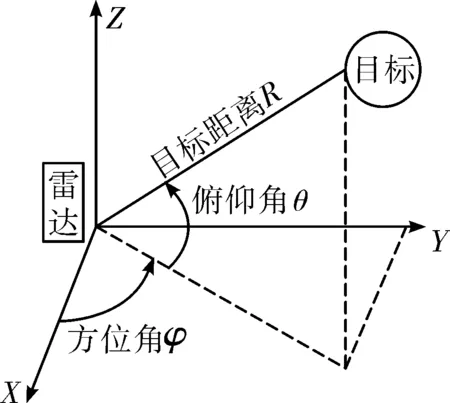
圖4 雷達姿態角示意圖
已知雷達坐標系下航跡點的位置坐標(L,B,H)時,首先可按如下轉換關系獲得它在地心坐標系中的位置坐標(x0,y0,z0):
(2)
式中:RN為卯酉圈半徑;f為橢圓偏心率;L為目標經度;B為目標緯度;H為目標高度。
設目標航跡點在雷達坐標系上的位置坐標為(xn(t),yn(t),zn(t)),雷達位置坐標為(x,y,z),雷達坐標系上的位置坐標轉換到機體坐標系上的位置坐標為(xb(t),yb(t),zb(t)),則:
(3)

雷達視線角在機體坐標系中的實時方位角φ(t)和俯仰角θ(t)為:
(4)
式中:φ(t)[0°,360°],θ(t)[0°,180°]。
2.4 目標軌跡建模
根據文獻[9]目標的基本運動狀態包括靜止、勻速直線運動、勻加速(減速)、協調轉彎、爬升(俯沖),推導出目標的姿態角、速度和瞬時位置的方程,可在雷達坐標系下仿真出目標來襲運動軌跡。
1)瞬時姿態角方程:
(5)

2)雷達坐標系下的速度方程:
(6)
式中:Vx、Vy、Vz為目標機體坐標系下的速度。
3)瞬時位置方程:
(7)
式中:RM=Re(1+e·sin2L),RN=Re(1-2e+3esin2L),e為地球橢圓率,e=1/298.257,Re為地球長半軸,值為6 378 137 m;L0為目標初始經度;B0為目標初始緯度;h0為目標初始高度;Li為目標瞬時經度;Bi為目標瞬時緯度;hi為目標瞬時高度;t為目標運動時間。
2.5 典型目標的航跡仿真
以雷達坐標系為基準,目標的起點(118°,32°,300 m),初始航向角α=90°、初始滾轉角β=0°、初始俯仰角γ=0°,仿真步長T=1 s、仿真步數N=3 600,極化方式為水平極化,雷達部署位置(125.5°,31.997°,500 m),根據目標的運動特性,分別對飛機和巡航導彈航跡進行仿真。
2.5.1 飛機航跡仿真
假定有一架F-16戰斗機來襲,根據戰斗機常用的機動動作,通過對爬升、平飛、俯沖基本運動組合仿真飛機的飛行航跡。圖5(a)為目標在雷達坐標系下的飛行軌跡,圖5(b)為目標在雷達坐標系下的姿態角信息。
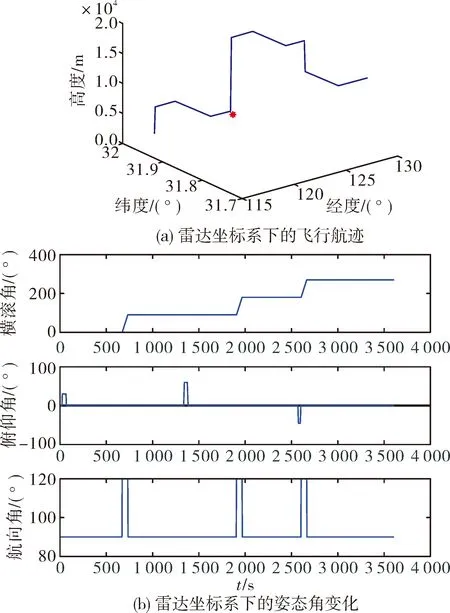
圖5 F-16戰斗機運動航跡仿真
2.5.2 巡航導彈航跡仿真
假定有一枚BGM-109戰斧巡航導彈來襲,根據文獻[10]提出的BGM-109作戰過程示意圖,將導彈飛行過程簡化為:爬升、平飛巡航、轉彎飛行、躍升、俯沖基本運動,通過對這些簡單軌跡組合仿真戰斧巡航導彈攻擊軌跡。圖6(a)為目標在雷達坐標系下的飛行軌跡,圖6(b)為目標在雷達坐標系下的姿態角信息。
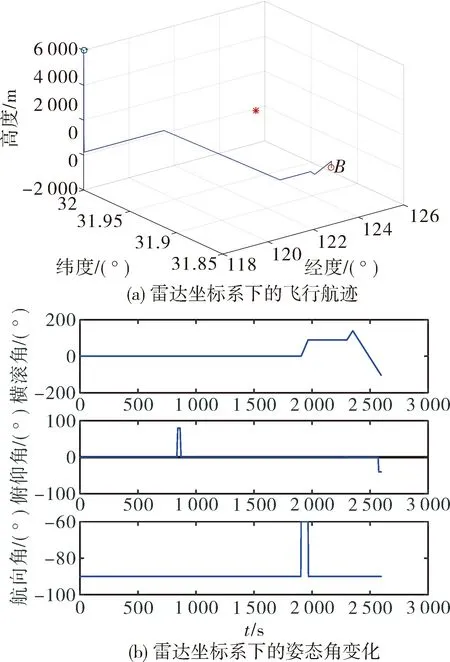
圖6 巡航導彈運動航跡仿真
3 典型空中目標動態RCS仿真分析
首先,根據目標航跡、飛行速度、雷達位置和采樣間隔,以及飛行過程中目標的姿態信息,計算得出機體坐標系下的視向姿態角。然后,提取某時刻的視向姿態角,從目標的靜態RCS序列中檢索出對應的RCS值,即為該時刻目標的動態RCS值。最后,對仿真得到的目標動態RCS進行分析。
3.1 飛機動態RCS仿真
F-16戰斗機在頻率F=3 GHz、水平極化下的RCS幅度變化如圖7所示。
根據圖5飛機航跡仿真結果,求解出設定場景下目標飛行過程中的方位角,對圖7中的目標0°~360°下RCS進行高精度插值,并尋找出相應方位角的RCS,即目標動態RCS信息。仿真得到的觀測時間內目標RCS幅度變化如圖8~圖9所示。
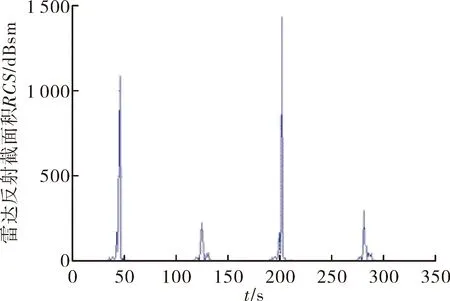
圖7 F-16戰斗機RCS靜態測量數據
綜合圖8和圖9可知,兩種飛行軌跡下的RCS變化幅度大,當飛機爬升飛行時,雷達容易發現目標;當飛機接近雷達時,雷達波束逐漸接近迎頭照射,RCS值及其變化幅度減小。此外,飛機俯沖飛行時,RCS值變化范圍小,說明這種飛行方式有較好的突防效果。但飛機在俯沖前,RCS有明顯突增,雷達容易發現目標,因此在防空作戰中,防空武器應在飛機俯沖前就開始攔截目標,提高防空武器攔截突防飛機的概率。
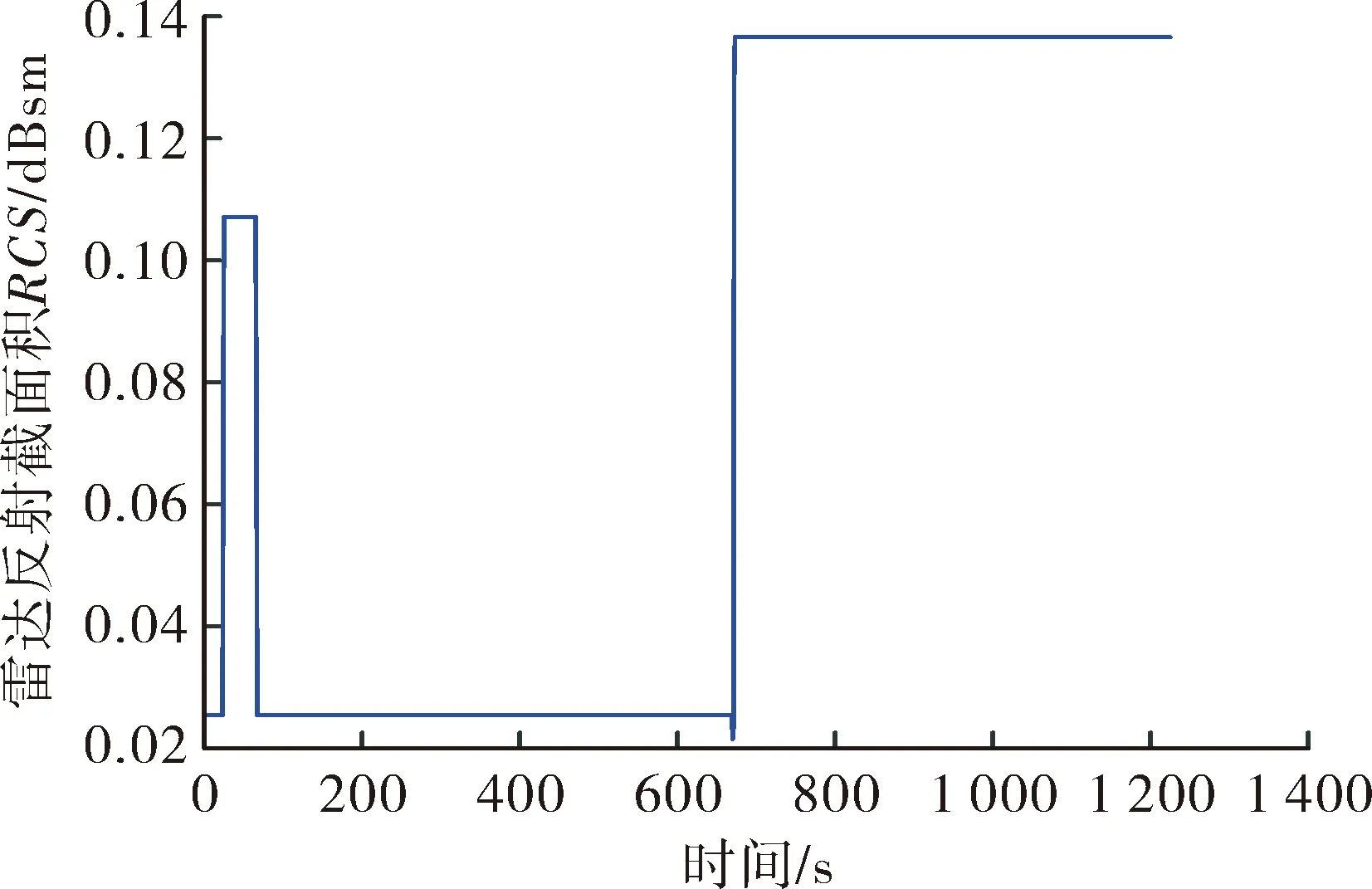
圖8 F-16戰斗機平飛—爬升—平飛段RCS變化
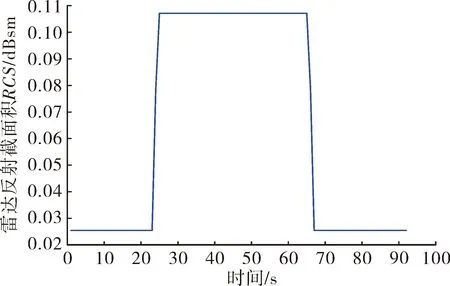
圖9 F-16戰斗機平飛—俯沖—平飛段RCS變化
3.2 巡航導彈的動態RCS仿真
巡航導彈在頻率F=3 GHz、水平極化下的RCS幅度變化如圖10所示。
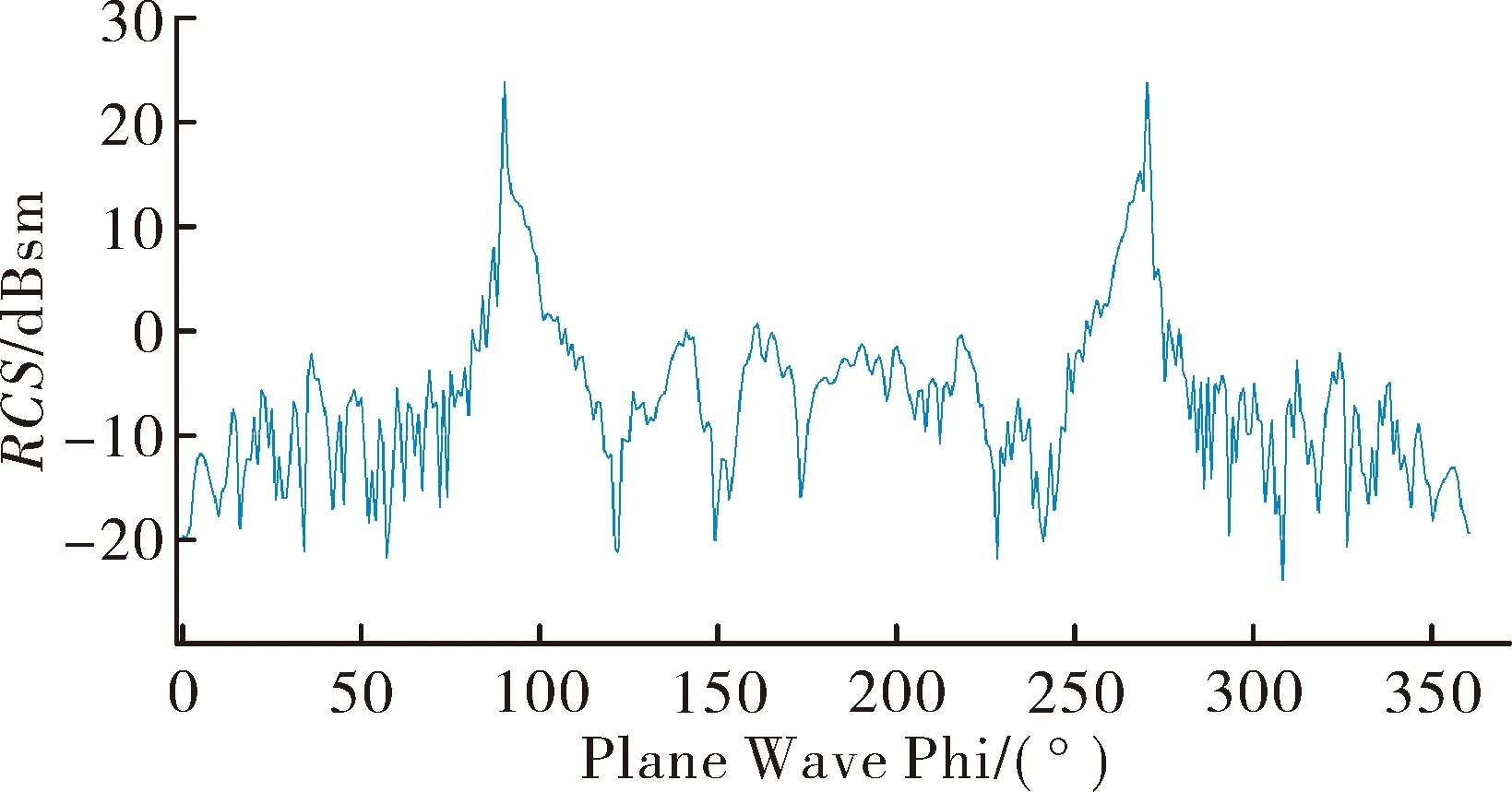
圖10 巡航導彈RCS靜態測量數據
根據圖6巡航導彈軌跡仿真結果,求解出目標末端打擊段(躍升—俯沖段)的方位角,對圖10中的目標0°~360°下RCS進行高精度插值,并尋找出相應方位角的RCS,即目標動態RCS信息。仿真得到的觀測時間內目標RCS幅度變化如圖11所示。
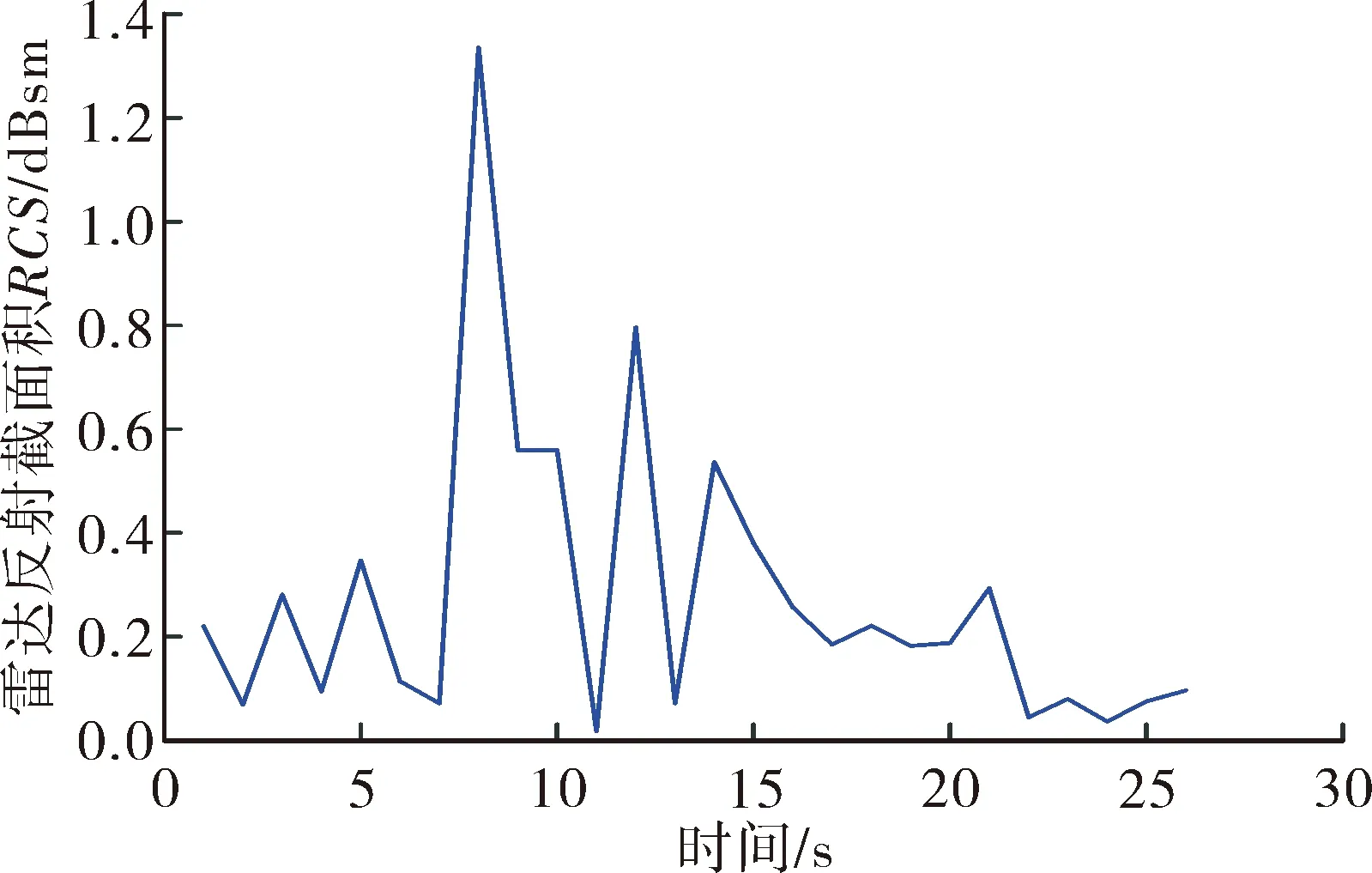
圖11 巡航導彈俯沖打擊段RCS變化
由圖11可知,在巡航導彈的俯沖打擊段內,導彈的RCS變化幅度大,出現了多個波峰和波谷,并且導彈在5~10 s采樣時間內,RCS躍升到最大值,這是由于巡航導彈躍升飛行導致視向俯仰角變化所決定的。因此,對于巡航導彈的末端防御,搜索雷達在巡航導彈躍升段容易發現目標,防空武器就應開始采取相應的攔截措施,提前部署火力單元。
4 結論
隨著戰斗機、巡航導彈等空襲武器的隱身性能不斷提高,對擔負著保護重要目標、區域安全的防空武器系統的防御能力提出了更高的要求。從文中仿真分析可知,對于高速運動的目標,飛行軌跡影響機體坐標系中視向角的變化規律,根據復雜目標的散射起伏,視向角的變化會引起RCS的劇烈起伏。通過航跡仿真結果和目標靜態RCS數據相結合,搜索雷達能提前快速準確的掌握運動目標散射特性的變化,為后續作戰行動留出充足的時間。