管道清淤機器人懸架機構越障性能優化與仿真
2020-08-25 02:06:40韓夢澤郭京波
機械工程與自動化 2020年4期
關鍵詞:優化
韓夢澤,郭京波,張 潮
(石家莊鐵道大學 省部共建交通工程結構力學行為與系統安全國家重點實驗室,河北 石家莊 050043)
0 引言
隨著機器人技術的快速發展,國內外排水管道檢查、清淤工作不斷由管道機器人代替[1]。針對管道內的復雜環境,管道機器人必須具有良好的行駛性能,尤其是較強的越障能力,因此對管道機器人的越障性能研究一直是機器人研究領域的熱點之一[2]。文獻[3-4]建立了機器人越障過程中的動力學模型,研究了一些運動學限制條件對機器人越障性能的影響。文獻[5]提出了一種基于遺傳算法的質量選擇的優化模型,并基于ADAMS仿真驗證了該方法的正確性。但現有文獻關于管道機器人移動機構對越障性能影響的研究較少。本文針對設計的一種懸架式管道清淤機器人,以懸架越障時的準靜力學模型為基礎,利用控制變量法和序列二次規劃法對懸架尺寸進行優化,以降低越障時電機的能耗。
1 懸架越障通過條件
管道清淤機器人通過懸架完成越障,為確保懸架參數基于同一障礙優化,需要分析懸架越障的通過條件。垂直障礙是常用于評定管道機器人越障性能的重要指標,結合管道內常存在碎石塊等建筑垃圾的實際情況,采用階梯障礙類型。在分析時假設:①懸架為剛性,且結構對稱;②車輪為剛性;③懸架質量忽略不計。
管道清淤機器人前輪越障時的受力情況如圖1所示。圖1中,N1、N2、N3分別為地面作用在前、中、后輪的支撐力,Ft1、Ft2、Ft3分別為前、中、后輪的水平驅動力,Gr為車輪重量,Gb為一半車體重量,C為車體的質心點,P2為擺桿與搖臂的鉸接點,P1為懸架與車體的鉸接點,O、P3、P4分別為前、中、后輪與懸架的鉸接點;h為障礙高度,α為支撐力N1與水平線的夾角,lp、l2、l3、lb分別為鉸接點P2、P3、O和質心點C到鉸接點P4的水平距離,hp為鉸接點O到鉸接點P2的垂直距離,r為車輪半徑。
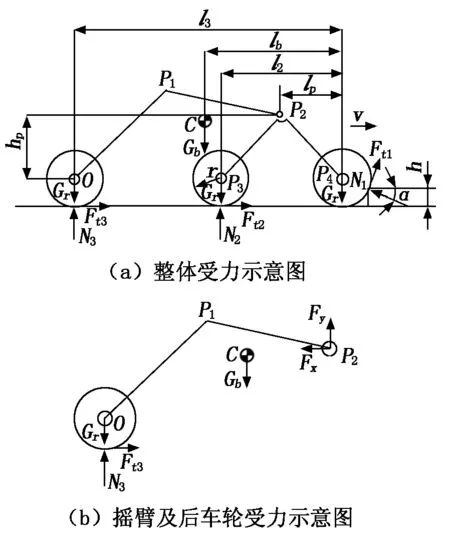
圖1 管道清淤機器人前輪越障時準靜力學模型
以水平方向為X軸、垂直方向為Y軸,通過靜力學分析可得平衡方程組:

(1)
且
Fti=φNii=1,2,3.
(2)
其中:φ為附著系數。
由圖1幾何關系可知:
(3)
將式(1)~式(3)聯立得:

(4)
其中:

(5)
(6)
(7)
(8)
同理可得中輪和后輪的越障通過條件,此處不再贅述。通過分析可知在管道清淤機器人的結構參數不變和附著系數相同的條件下,前輪可越障高度最小。
2 懸架結構優化
2.1 設計變量
取單側懸架進行研究,以后輪與搖臂的鉸接點為原點O,機器人移動方向為x正軸建立坐標系,如圖2所示。圖2中,P1、P2、P3、P4為懸架鉸接點,其坐標初值為:D1=180 mm,D2=200 mm,D3=300 mm,D4=150 mm,D5=180 mm,D6=430 mm。
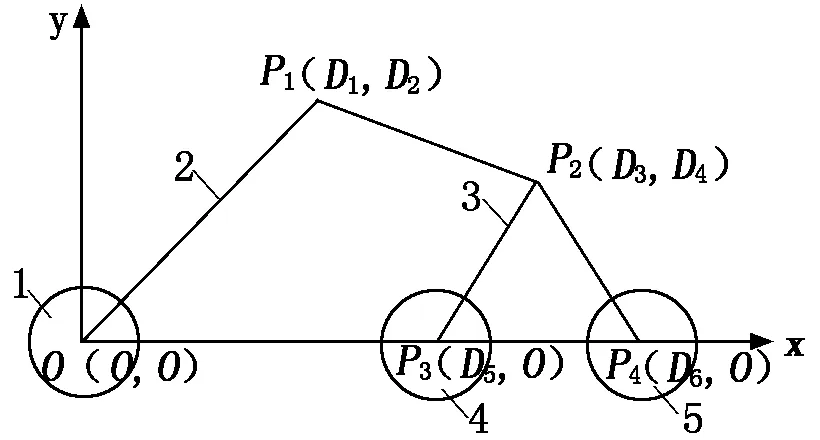
1-后輪;2-搖臂;3-擺桿;4-中輪;5-前輪
車輪半徑為給定值,質心位置由懸架與車體鉸接位置決定。其余的6個參數作為設計變量,記為:
D=[D1,D2,D3,D4,D5,D6]T.
2.2 約束條件
為防止管道清淤機器人通過障礙時發生干涉,要求其具有幾何通過性[6],懸架與車體的鉸接點P1高度大于最小離地間隙;在前輪爬上障礙后,中輪在越障時避免障礙與擺桿發生干涉。約束條件如下:

(9)
式中:c為最小離地間隙;h為最大障礙高度。
2.3 目標函數
懸架越障的過程包括前輪、中輪、后輪越障三個階段。以機器人完整越障所需的電機能耗大小來表示懸架的越障能力,消耗的總功值越小,說明當前尺寸下的懸架越障能力越強。目標函數表示為:
U(D)=W1+W2+W3.
(10)
其中:W1、W2、W3分別為前、中、后輪驅動電機消耗的能量;U為總功耗。
2.4 單設計變量研究
利用控制變量法,逐個分析變量對目標函數的影響大小。由于ADAMS軟件可以直接測量輸出功率,所以用輸出功率間接表示電機消耗的總功。
取φ=0.7,r=75 mm,Gr=1.1 kg,Gb=15 kg,將設計變量初值代入式(4)得障礙極限高度為90.3 mm,考慮誤差因素,建立高75 mm障礙和懸架模型導入ADAMS進行越障仿真。將設計變量按照表1中取值范圍進行賦值,得到該變量取不同值的功率變化曲線。圖3為變量D1取不同值時的功率曲線,其他變量同理可得。

表1 設計變量取值范圍
由于功率變化曲線不能較為直觀地表明各設計變量對目標函數的影響大小,對各變量功率曲線進行定積分計算,便得到完成一次越障懸架所消耗的功,表2為D1變量定積分計算結果即D1對目標函數的影響,其他變量同理可得。通過分析可知,設計變量D3、D4、D5對目標函數影響較大,D1、D2、D6各自取值為195 mm、185 mm、415 mm時越障能耗最小。
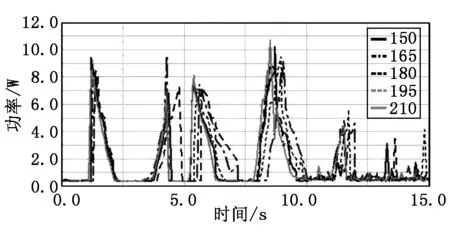
圖3 D1取不同值時的功率變化曲線

表2 D1對目標函數的影響
2.5 多設計變量研究
以懸架越障能耗最小為最優目標函數,由式(9)、式(10)以及上節內容得:
(11)
序列二次規劃法是求解該式的最有效方法。建立式(11)相對應的拉格朗日函數:
L(D,λ)=U(D)+λTg(D).
(12)
其中:λ為拉格朗日乘子向量。
將拉格朗日函數L(D,λ)和約束函數g(D)在給定點Dk做泰勒展開,分別取到二次項和線性項:
L(Dk+1,λk+1)=L(Dk,λk)+[L(DK,λK)]T(Dk+1-DK)+
(13)
其中:Hk為Hesse矩陣。
g(Dk+1)=g(Dk)+[g(Dk)]T(Dk+1-Dk).
(14)
對式(12)在給定點Dk進行一階求導:
L(Dk,λk)=U(Dk)+[g(Dk)]Tλk.
(15)
設
(16)
將式(15)、式(16)代入式(13)中,得:
L(Dk+1,λk+1)=U(Dk)+(λk)Tg(Dk)+g(Dk)dk+
(17)
將式(16)代入式(14)中,得:
g(Dk+1)=g(Dk)+[g(Dk)]Tdk.
(18)
便將非線性規劃問題轉換為序列二次型規劃問題:
(19)
其中:QP(d)為關于d的二次規劃法函數。對式(19)進行求解得到dk,然后確定步長μk,按照Dk+1=Dk+μkdk進行迭代,得到目標的最優解。
使用ADAMS/View中優化分析工具箱通過迭代運算尋找到設計變量的最優解,計算結果如圖4所示。
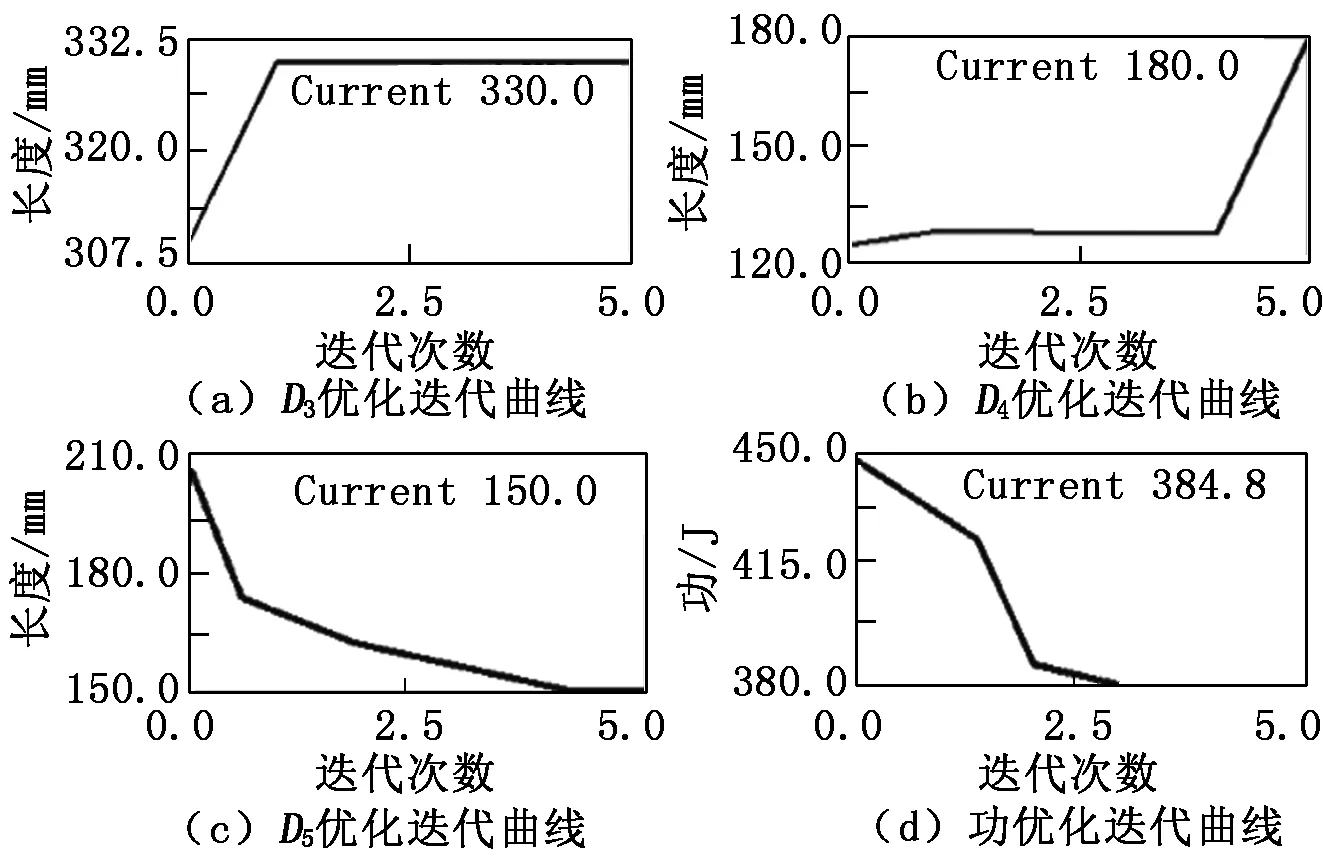
圖4 設計變量及總功耗的優化迭代變化曲線
由圖4可知:D3、D4、D5的最優解分別為330 mm、180 mm、150 mm;優化前后能耗分別為440.7 J與
384.8 J,即通過優化能耗降低了12.7%。
3 管道清淤機器人動力學仿真
在ADAMS/View建立管道清淤機器人虛擬樣機,內徑為1 000 mm的管道以及高度分別為50 mm、100 mm以及150 mm的障礙模型。
運行三組仿真,機器人均可成功越障,驗證了優化結果的正確性。機器人在越障過程中的速度曲線如圖5所示。以150 mm越障速度曲線為分析對象,從圖5中可看出,0 s~10 s為前輪越障階段,用時10 s,10 s~16 s為中輪越障階段,用時6 s,16 s~26 s為后輪越障階段,用時10 s;并且前輪越障時在速度為零的時間最久,這與準靜力模型分析相符。
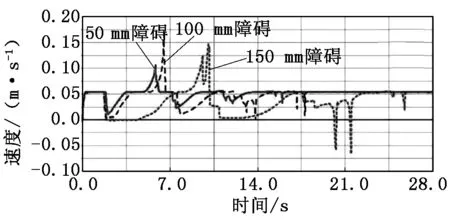
圖5 管道清淤機器人越障速度曲線
4 結論
結合管道清淤機器人懸架的基本結構,建立了越障時的準靜力學模型,分析得出機器人可越垂直障礙的最大高度。在此基礎上構建了優化數學模型,利用控制變量法和序列二次規劃法對懸架尺寸進行優化,得到了最優尺寸。通過ADAMS的仿真,結果顯示該尺寸下的懸架越障時電機能耗得到明顯降低,并驗證了優化結果的正確性,為管道清淤機器人懸架參數優化設計提供了可行的方法。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
