基于立體視覺的安全車距新型識別技術的研究
2020-08-13 06:56:44王曉霞
汽車實用技術 2020年14期
王曉霞
摘 要:車輛行駛距離是交通安全的重要指標之一。安全車距的測量已成為智能交通領域的一個日益熱門的研究領域。通過分析立體視覺的基本原理,標定CCD傳感器的內外參數(shù),提出了一種測量立體視覺的方法,建立了基于立體視覺和DSP的車輛距離控制系統(tǒng)。一旦車輛的速度和距離形成非安全關聯(lián),它就會發(fā)出警告,并上傳數(shù)據(jù)或強制限速。該方法根據(jù)從左右傳感器獲取的目標車輛圖像的不同坐標,識別特征點,計算到目標車輛的距離,分析車輛距離的安全性。實驗結果表明,該方法測量范圍寬,測量精度高,運算速度快,能夠滿足智能交通中安全車距測量的實際需要。
關鍵詞:智能交通;車輛安全距離;圖像特征;智能交通;DSP
中圖分類號:U462 ?文獻標識碼:A ?文章編號:1671-7988(2020)14-62-03
Abstract: Vehicle distance is one of the important indexes of traffic safety. The measurement of safe distance between vehicles has become an increasingly popular research field in the field of intelligent transportation. By analyzing the basic principle of stereo vision and calibrating the internal and external parameters of CCD sensor, a method of measuring stereo vision is proposed, and a vehicle distance control system based on stereo vision and DSP is established. Once the vehicle's speed and distance form an unsafe relationship, it will issue a warning and upload data or impose a speed limit. According to the different coordinates of the target vehicle image obtained from the left and right sensors, the feature points are identified, the distance to the target vehicle is calculated, and the safety of the vehicle distance is analyzed. The experimental results show that the method has a wide measurement range, high measurement accuracy and fast calculation speed, and can meet the actual needs of the safe distance measurement in intelligent transportation.
Keywords: Intelligent transportation; Vehicle safety distance; Image features; Intelligent transportation; DSP
CLC NO.: U462 ?Document Code: A ?Article ID: 1671-7988(2020)14-62-03
1 引言
隨著經(jīng)濟和社會的發(fā)展,汽車越來越多,交通堵塞越來越嚴重,嚴重的交通事故也越來越頻繁,給人們的生命財產安全造成了巨大的損失。2018年,總共有390萬余例交通事故報告,其中有21萬余個道路交通傷亡事故,導致6余萬人死亡,25萬余人受傷,直接財產損失9.43億元[1-2]。對司機來說最大的危險來自于周圍的車輛。安全車距測量通過計算當前車與前方目標車之間的距離,在車距較小時發(fā)出報警信號,完成危險報警和防撞功能。據(jù)不完全統(tǒng)計,汽車碰撞事故在交通事故中占相當大的比例,因為沒有注意車輛之間的安全距離。因此,解決安全車距的測量問題可以預防交通事故的發(fā)生[3-4],這也是當代智能交通實現(xiàn)的重要內容之一。本文提出了一種基于立體視覺的安全車距測量方法。根據(jù)左右傳感器獲取的目標車輛圖像的不同坐標,計算出目標與傳感器之間的距離,在車載行駛狀態(tài)DSP監(jiān)控系統(tǒng)中增加了安全距離的測量功能,開發(fā)了遠程傳輸功能。一旦車輛的速度和距離形成非安全關聯(lián),它就會發(fā)出警告,并上傳數(shù)據(jù)或強制限速。該方法可用于檢測車輛距離,識別車道、障礙物、交通標志等,可廣泛應用于智能交通領域[5]。
2 立體視覺的原理
立體視覺是計算機視覺的一個重要分支。根據(jù)三角測量原理、立體視覺使用兩個CCD傳感器獲得兩張同一對象從不同的立場和獲得目標的三維信息通過計算兩幅圖像中對應點的視差測量相機之間的距離和目標[3]。兩個CCD傳感器的投影中心距離為基線距離,為B。兩個傳感器同時觀測空間物體相同的特征點P,分別從左CCD和右CCD獲取點P圖像,假設的兩個CCD圖像傳感器在同一平面上,每個CCD的有效焦距為f,那么特征點P與兩個圖像坐標的Y坐標相同,也就是Yleft = Yright = Y。那么視差就是D = Xleft-Xright。計算得到的特征點P在攝像機坐標系中的三維坐標為:
3 攝像機標定
相機成像模型包括線性模型和非線性模型。基于針孔成像原理,線性模型建立了空間表面點與像點之間的幾何位置關系,描述了空間點、投影中心與像點之間的共線關系,處于理想狀態(tài)。在不考慮圖像點坐標偏差的情況下,嚴格按照針孔成像原理建立線性相機成像模型。從空間點到像平面的投影過程本質上是建立模型的過程,可以表示為幾個坐標系的轉換。線性模型的攝像機參數(shù)是在轉換過程中引入的參數(shù)。利用相機標定的線性模型來確定這些參數(shù)。校準分為兩部分:內部參數(shù)校準和外部參數(shù)校準。內部參數(shù)是指相機成像的基本參數(shù),如主點(圖像中心)、焦距、徑向透鏡偏差、離軸透鏡偏差等系統(tǒng)誤差參數(shù)。外部參數(shù)是指相機在空間坐標中的方位角和位置。內外參數(shù)標定的組合可以建立三維坐標與二維圖像坐標之間的關系。
具體校準程序為:①將校準板置于適當?shù)奈恢茫蛊湓趦蓚€相機中完全成像。通過標定,可以確定兩臺相機(R1、T1、R2、T2)的內部參數(shù)和外部參數(shù),其中R1、T1、R2、T2分別代表左右相機的相對位置和空間坐標。②假設任何空間的非齊次坐標點在空間坐標系,坐標系的左相機和坐標系的右相機xw,x1,x2,然后合并,消除xw后,兩個攝像頭之間的位置關系R和T可以表示為:
4 車輛距離測量的計算
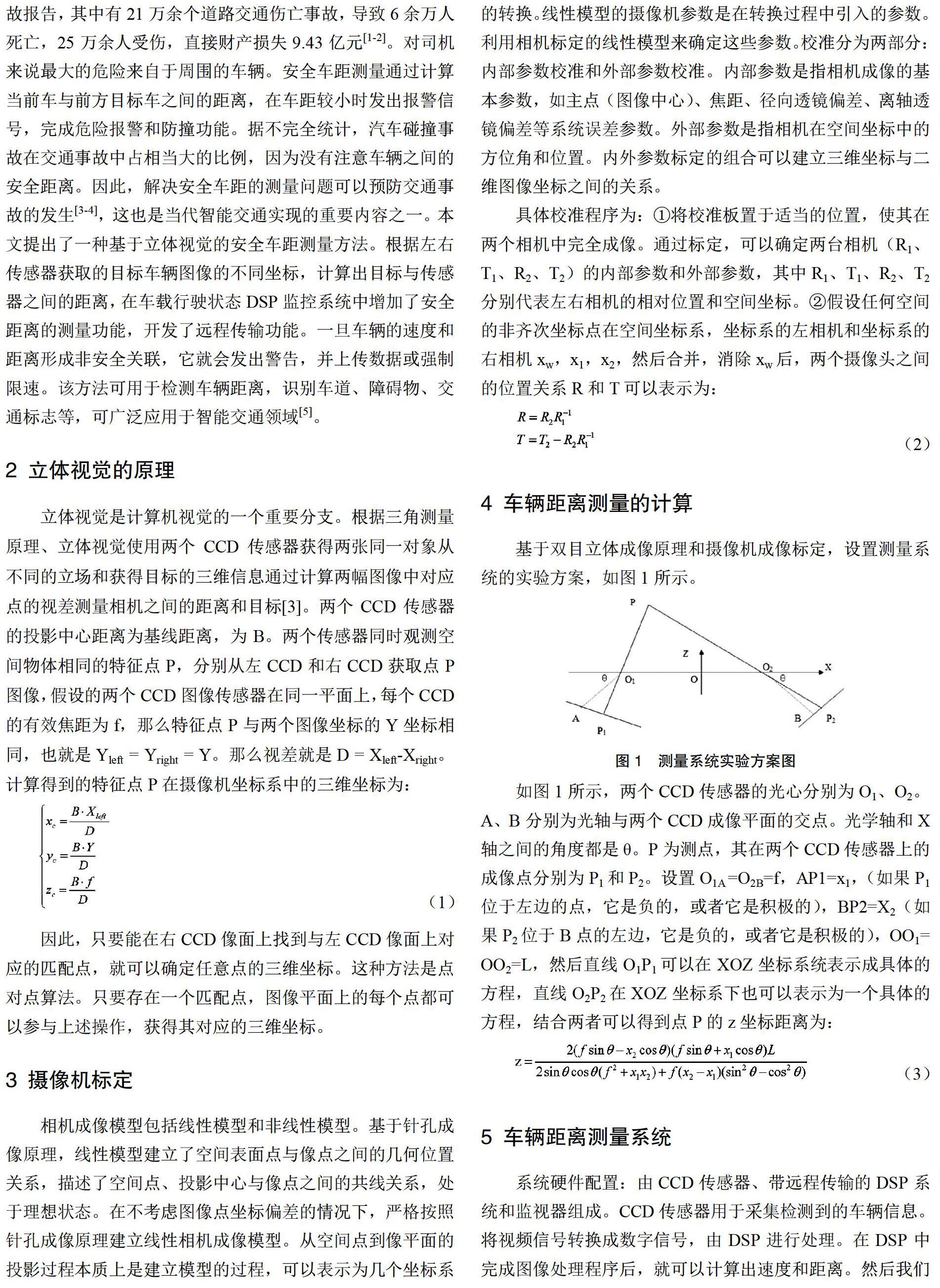
基于雙目立體成像原理和攝像機成像標定,設置測量系統(tǒng)的實驗方案,如圖1所示。
如圖1所示,兩個CCD傳感器的光心分別為O1、O2。A、B分別為光軸與兩個CCD成像平面的交點。光學軸和X軸之間的角度都是θ。P為測點,其在兩個CCD傳感器上的成像點分別為P1和P2。設置O1A =O2B=f,AP1=x1,(如果P1位于左邊的點,它是負的,或者它是積極的),BP2=X2(如果P2位于B點的左邊,它是負的,或者它是積極的),OO1= OO2=L,然后直線O1P1可以在XOZ坐標系統(tǒng)表示成具體的方程,直線O2P2在XOZ坐標系下也可以表示為一個具體的方程,結合兩者可以得到點P的z坐標距離為:
5 車輛距離測量系統(tǒng)
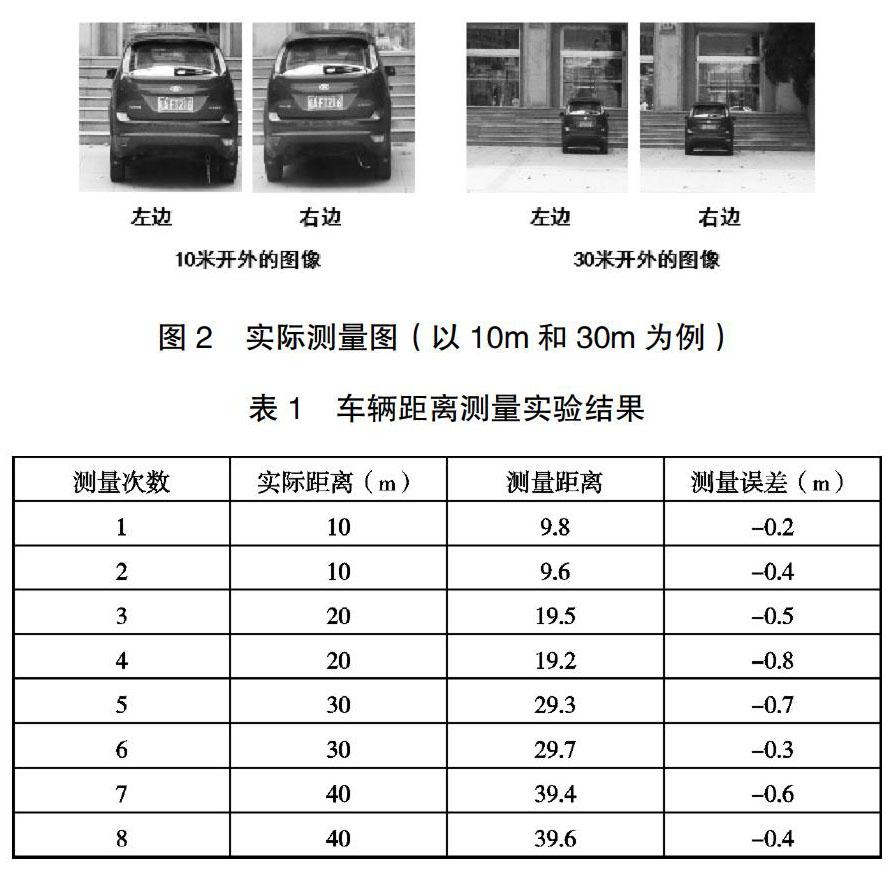
系統(tǒng)硬件配置:由CCD傳感器、帶遠程傳輸?shù)腄SP系統(tǒng)和監(jiān)視器組成。CCD傳感器用于采集檢測到的車輛信息。將視頻信號轉換成數(shù)字信號,由DSP進行處理。在DSP中完成圖像處理程序后,就可以計算出速度和距離。然后我們可以確定距離是否在安全范圍內。如果在安全范圍內,則結果將顯示在監(jiān)視器中;否則,將發(fā)出警告,數(shù)據(jù)被上傳或者速度被強制限制。以測量系統(tǒng)的重要環(huán)節(jié)為基礎,選取10m、20m、30m、40m四個距離進行實際測量,選擇某型號轎車進行了實驗驗證。圖2為10m和40m靜態(tài)車輛的圖片,完成系統(tǒng)搭建后,選擇4個車距,10米,20米,30米,40米,做實際測量。實驗結果如表1所示。
通過數(shù)據(jù)分析,測量誤差小于5%,符合《公路交通管理辦法》第十五條關于高速公路車輛距離的規(guī)定,充分表明該方法可以滿足車輛距離測量的實際要求。基于DSP硬件測量系統(tǒng),車輛距離的計算可以保證實時計算速度,低測量誤差,快速,準確地測量前方和前方車輛的距離,并判斷車距組合速度的安全性。
6 結論
綜上所述,由于應用于智能交通技術的立體視覺技術仍處于研發(fā)過程中,因此,由于許多外部影響因素,在實際應用很難全面考量。外部因素包括沿車輛法線方向的車輛距離,車輛之間的橫向距離,光暈干擾,行人干擾和車輛變道等。本文所做的研究是靜態(tài)的(在較少外部因素干擾的情況下),盡管如此,基于本文的研究理論和基礎,在今后,在移動車輛中應用的立體視覺技術的研究將越來越深入和切合實際。
參考文獻
[1] 王麗影.安全車距檢測系統(tǒng)的研究與設計[D].長春工業(yè)大學,2013.
[2] 張鳳靜,王紅陽,張軒.基于立體視覺的汽車安全車距預警系統(tǒng)研究[J].艦船電子工程,2012,32(08):134-136.
[3] 張鳳靜,周建江,夏偉杰.基于雙目立體視覺的汽車安全車距測量方法[J].智能系統(tǒng)學報,2011,6(01):79-84.
[4] 張鳳靜.基于立體視覺的汽車安全車距預警系統(tǒng)研究[D].南京航空航天大學,2010.
[5] 林廣宇.基于嵌入式技術的車載圖像監(jiān)控系統(tǒng)研究[D].長安大學, 2009.
