危化品車輛爆胎危險應急處理裝置設計
2020-08-13 06:56:44費文玉左付山李德文周韻楚肖菁菁任可兒
汽車實用技術 2020年14期
費文玉 左付山 李德文 周韻楚 肖菁菁 任可兒
摘 要:當危化品車輛在高速行駛中爆胎時,由于車輛側偏、駕駛員錯誤操縱方向盤和液態危化品影響車輛重心等因素,極易造成車輛偏離直線行駛甚至側翻等嚴重后果,造成人民生命財產損失。文章提出了一種應急處理裝置,采用液壓傳動的方式,結合電子控制技術,在危化品車輛發生爆胎或可能出現爆胎危險時,及時鎖止爆胎危險側車架與車橋間距離,緊接著快速增大爆胎危險側車架與車橋間距離并減小未爆胎側車架與車橋間距離,從而使車身保持平衡,防止嚴重交通事故的發生。
關鍵詞:危化品車輛;爆胎;應急處理;液壓傳動;電子控制
中圖分類號:U462.1 ?文獻標識碼:A ?文章編號:1671-7988(2020)14-27-05
Abstract: When a dangerous chemical vehicle blows out in high-speed driving, due to the side deflection of the vehicle, the driver's wrong steering wheel and the liquid dangerous chemicals affecting the vehicle's center of gravity and other factors, it is very easy to cause serious consequences such as the vehicle deviates from the straight line driving or even rollover, resulting in the loss of people's life and property. In this paper, an emergency treatment device is proposed, which adopts hydraulic transmission and electronic control technology to lock the distance between the frame and the axle on the dangerous side of the tyre burst in time when the tyre burst or the danger of the tyre burst may occur on the dangerous chemical vehicle, then quickly increase the distance between the frame and the axle on the dangerous side of the tyre burst and reduce the distance between the frame and the axle on the non tyre burst side, so as to keep the vehicle body flat To prevent serious traffic accidents.
Keywords: Dangerous chemical vehicle; Tire burst; Emergency treatment; Hydraulic transmission; Electronic control
CLC NO.: U462.1 ?Document Code: A ?Article ID: 1671-7988(2020)14-27-05
前言
汽車爆胎作為導致交通事故的原因之一,其影響及危害是不可估量的。據有關統計數據顯示:交通事故中,爆胎引發的事故占交通事故總量的70%以上[1]。高速行駛時,時速在120km/h發生爆胎導致車輛側翻的死亡率幾乎高達100%[2]。對于危化品車輛而言,爆胎將引起車輛側翻、燃燒、爆炸、泄漏等更嚴重的后果,造成經濟損失、環境污染、生態破壞、人員傷亡等一系列的重大事故。因此,控制爆胎車輛的車架平穩十分重要。本文提出了一種危化品車輛爆胎危險應急處理裝置,本裝置主體為安裝在車架與車橋之間的液壓缸,通過切換電磁閥來控制液壓缸的伸縮,從而調整兩側車架與車橋間的距離,保持車架平穩,降低爆胎危險車輛側翻的風險。
1 爆胎后危化品車輛操縱穩定性分析
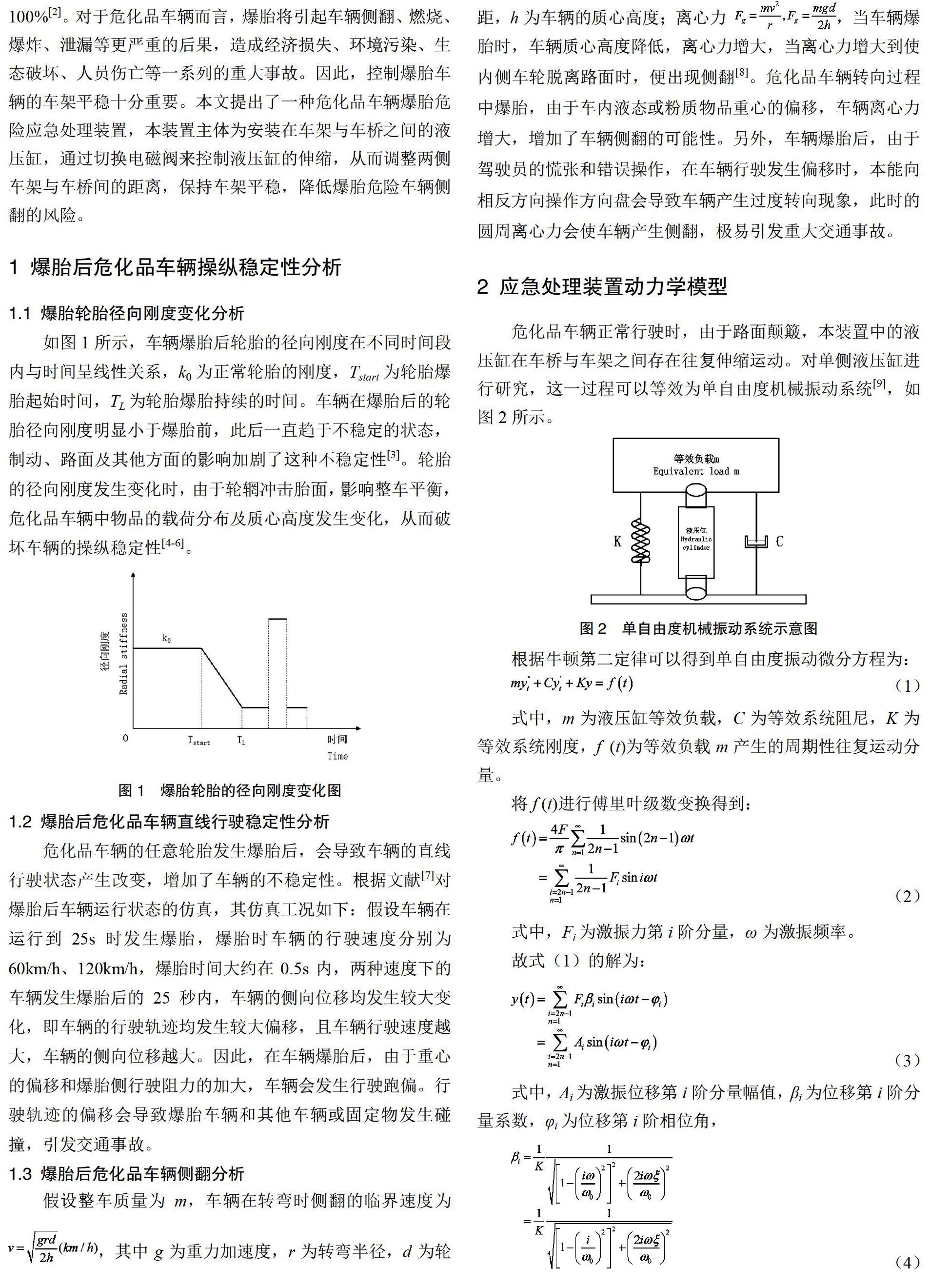
1.1 爆胎輪胎徑向剛度變化分析
如圖1所示,車輛爆胎后輪胎的徑向剛度在不同時間段內與時間呈線性關系,k0為正常輪胎的剛度,Tstart為輪胎爆胎起始時間,TL為輪胎爆胎持續的時間。車輛在爆胎后的輪胎徑向剛度明顯小于爆胎前,此后一直趨于不穩定的狀態,制動、路面及其他方面的影響加劇了這種不穩定性[3]。輪胎的徑向剛度發生變化時,由于輪輞沖擊胎面,影響整車平衡,危化品車輛中物品的載荷分布及質心高度發生變化,從而破壞車輛的操縱穩定性[4-6]。
1.2 爆胎后危化品車輛直線行駛穩定性分析
危化品車輛的任意輪胎發生爆胎后,會導致車輛的直線行駛狀態產生改變,增加了車輛的不穩定性。根據文獻[7]對爆胎后車輛運行狀態的仿真,其仿真工況如下:假設車輛在運行到25s時發生爆胎,爆胎時車輛的行駛速度分別為60km/h、120km/h,爆胎時間大約在0.5s內,兩種速度下的車輛發生爆胎后的25秒內,車輛的側向位移均發生較大變化,即車輛的行駛軌跡均發生較大偏移,且車輛行駛速度越大,車輛的側向位移越大。因此,在車輛爆胎后,由于重心的偏移和爆胎側行駛阻力的加大,車輛會發生行駛跑偏。行駛軌跡的偏移會導致爆胎車輛和其他車輛或固定物發生碰撞,引發交通事故。
1.3 爆胎后危化品車輛側翻分析
假設整車質量為m,車輛在轉彎時側翻的臨界速度為 ,其中g為重力加速度,r為轉彎半徑,d為輪距,h為車輛的質心高度;離心力 ?,當車輛爆胎時,車輛質心高度降低,離心力增大,當離心力增大到使內側車輪脫離路面時,便出現側翻[8]。危化品車輛轉向過程中爆胎,由于車內液態或粉質物品重心的偏移,車輛離心力增大,增加了車輛側翻的可能性。另外,車輛爆胎后,由于駕駛員的慌張和錯誤操作,在車輛行駛發生偏移時,本能向相反方向操作方向盤會導致車輛產生過度轉向現象,此時的圓周離心力會使車輛產生側翻,極易引發重大交通事故。
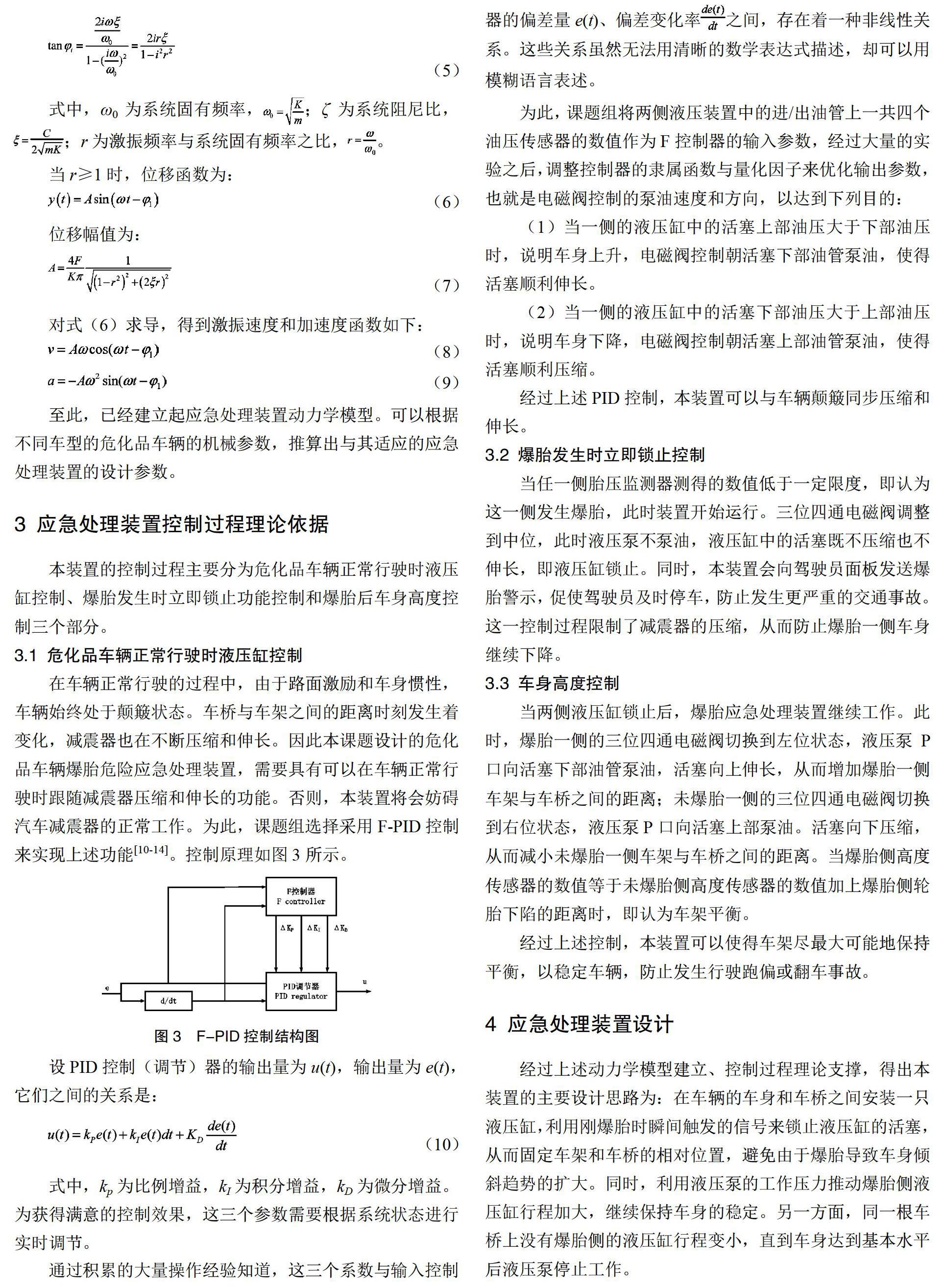
2 應急處理裝置動力學模型
危化品車輛正常行駛時,由于路面顛簸,本裝置中的液壓缸在車橋與車架之間存在往復伸縮運動。對單側液壓缸進行研究,這一過程可以等效為單自由度機械振動系統[9],如圖2所示。
至此,已經建立起應急處理裝置動力學模型。可以根據不同車型的危化品車輛的機械參數,推算出與其適應的應急處理裝置的設計參數。
3 應急處理裝置控制過程理論依據
本裝置的控制過程主要分為危化品車輛正常行駛時液壓缸控制、爆胎發生時立即鎖止功能控制和爆胎后車身高度控制三個部分。
3.1 危化品車輛正常行駛時液壓缸控制
在車輛正常行駛的過程中,由于路面激勵和車身慣性,車輛始終處于顛簸狀態。車橋與車架之間的距離時刻發生著變化,減震器也在不斷壓縮和伸長。因此本課題設計的危化品車輛爆胎危險應急處理裝置,需要具有可以在車輛正常行駛時跟隨減震器壓縮和伸長的功能。否則,本裝置將會妨礙汽車減震器的正常工作。為此,課題組選擇采用F-PID控制來實現上述功能[10-14]。控制原理如圖3所示。
通過積累的大量操作經驗知道,這三個系數與輸入控制器的偏差量e(t)、偏差變化率 之間,存在著一種非線性關系。這些關系雖然無法用清晰的數學表達式描述,卻可以用模糊語言表述。
為此,課題組將兩側液壓裝置中的進/出油管上一共四個油壓傳感器的數值作為F控制器的輸入參數,經過大量的實驗之后,調整控制器的隸屬函數與量化因子來優化輸出參數,也就是電磁閥控制的泵油速度和方向,以達到下列目的:
(1)當一側的液壓缸中的活塞上部油壓大于下部油壓時,說明車身上升,電磁閥控制朝活塞下部油管泵油,使得活塞順利伸長。
(2)當一側的液壓缸中的活塞下部油壓大于上部油壓時,說明車身下降,電磁閥控制朝活塞上部油管泵油,使得活塞順利壓縮。
經過上述PID控制,本裝置可以與車輛顛簸同步壓縮和伸長。
3.2 爆胎發生時立即鎖止控制
當任一側胎壓監測器測得的數值低于一定限度,即認為這一側發生爆胎,此時裝置開始運行。三位四通電磁閥調整到中位,此時液壓泵不泵油,液壓缸中的活塞既不壓縮也不伸長,即液壓缸鎖止。同時,本裝置會向駕駛員面板發送爆胎警示,促使駕駛員及時停車,防止發生更嚴重的交通事故。這一控制過程限制了減震器的壓縮,從而防止爆胎一側車身繼續下降。
3.3 車身高度控制
當兩側液壓缸鎖止后,爆胎應急處理裝置繼續工作。此時,爆胎一側的三位四通電磁閥切換到左位狀態,液壓泵P口向活塞下部油管泵油,活塞向上伸長,從而增加爆胎一側車架與車橋之間的距離;未爆胎一側的三位四通電磁閥切換到右位狀態,液壓泵P口向活塞上部泵油。活塞向下壓縮,從而減小未爆胎一側車架與車橋之間的距離。當爆胎側高度傳感器的數值等于未爆胎側高度傳感器的數值加上爆胎側輪胎下陷的距離時,即認為車架平衡。
經過上述控制,本裝置可以使得車架盡最大可能地保持平衡,以穩定車輛,防止發生行駛跑偏或翻車事故。
4 應急處理裝置設計
經過上述動力學模型建立、控制過程理論支撐,得出本裝置的主要設計思路為:在車輛的車身和車橋之間安裝一只液壓缸,利用剛爆胎時瞬間觸發的信號來鎖止液壓缸的活塞,從而固定車架和車橋的相對位置,避免由于爆胎導致車身傾斜趨勢的擴大。同時,利用液壓泵的工作壓力推動爆胎側液壓缸行程加大,繼續保持車身的穩定。另一方面,同一根車橋上沒有爆胎側的液壓缸行程變小,直到車身達到基本水平后液壓泵停止工作。
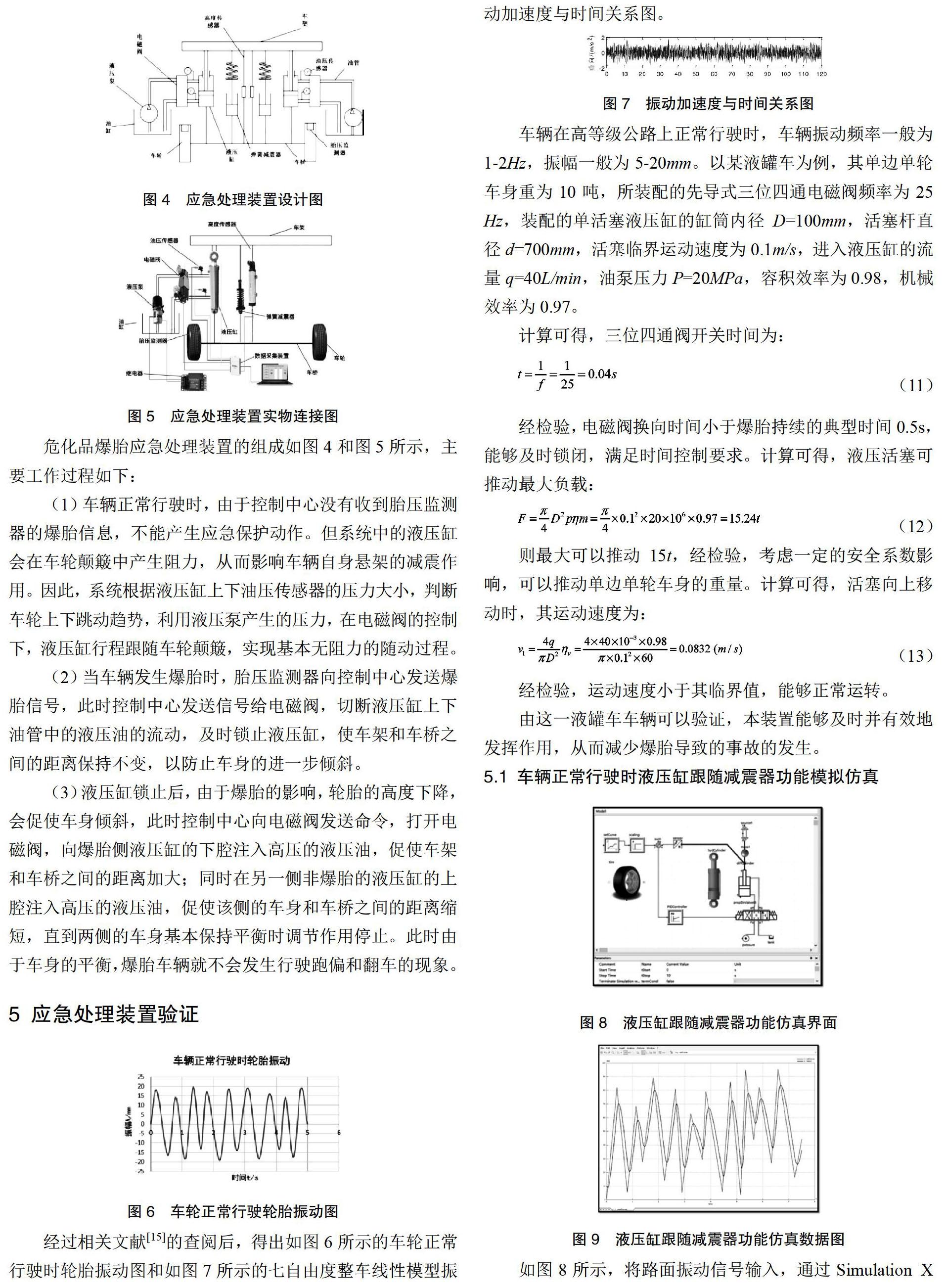
危化品爆胎應急處理裝置的組成如圖4和圖5所示,主要工作過程如下:
(1)車輛正常行駛時,由于控制中心沒有收到胎壓監測器的爆胎信息,不能產生應急保護動作。但系統中的液壓缸會在車輪顛簸中產生阻力,從而影響車輛自身懸架的減震作用。因此,系統根據液壓缸上下油壓傳感器的壓力大小,判斷車輪上下跳動趨勢,利用液壓泵產生的壓力,在電磁閥的控制下,液壓缸行程跟隨車輪顛簸,實現基本無阻力的隨動過程。
(2)當車輛發生爆胎時,胎壓監測器向控制中心發送爆胎信號,此時控制中心發送信號給電磁閥,切斷液壓缸上下油管中的液壓油的流動,及時鎖止液壓缸,使車架和車橋之間的距離保持不變,以防止車身的進一步傾斜。
(3)液壓缸鎖止后,由于爆胎的影響,輪胎的高度下降,會促使車身傾斜,此時控制中心向電磁閥發送命令,打開電磁閥,向爆胎側液壓缸的下腔注入高壓的液壓油,促使車架和車橋之間的距離加大;同時在另一側非爆胎的液壓缸的上腔注入高壓的液壓油,促使該側的車身和車橋之間的距離縮短,直到兩側的車身基本保持平衡時調節作用停止。此時由于車身的平衡,爆胎車輛就不會發生行駛跑偏和翻車的現象。
5 應急處理裝置驗證
經過相關文獻[15]的查閱后,得出如圖6所示的車輪正常行駛時輪胎振動圖和如圖7所示的七自由度整車線性模型振動加速度與時間關系圖。
車輛在高等級公路上正常行駛時,車輛振動頻率一般為1-2Hz,振幅一般為5-20mm。以某液罐車為例,其單邊單輪車身重為10噸,所裝配的先導式三位四通電磁閥頻率為25 Hz,裝配的單活塞液壓缸的缸筒內徑D=100mm,活塞桿直徑d=700mm,活塞臨界運動速度為0.1m/s,進入液壓缸的流量q=40L/min,油泵壓力P=20MPa,容積效率為0.98,機械效率為0.97。
經檢驗,運動速度小于其臨界值,能夠正常運轉。
由這一液罐車車輛可以驗證,本裝置能夠及時并有效地發揮作用,從而減少爆胎導致的事故的發生。
5.1 車輛正常行駛時液壓缸跟隨減震器功能模擬仿真
如圖8所示,將路面振動信號輸入,通過Simulation X仿真[16-19]來驗證液壓缸跟隨減震的功能,隨后得出如圖9所示的仿真數據圖。圖中紅線代表輸入的路面振動頻譜,藍線代表液壓缸行程。從圖中可以看出,本裝置可以實現在車輛正常行駛時對減震器伸縮功能的跟隨,不影響原車減震器的正常工作,從而不會影響車輛的正常行駛。
5.2 車輛爆胎后系統調節過程模擬仿真
如圖10所示,將電磁閥的切換信號輸入,經過Simulation X仿真來驗證車輛爆胎后液壓缸對車架車橋間距離的控制,隨后得出如圖11所示的仿真數據圖。圖中紅線代表液壓缸下部壓力,黑線代表液壓缸上部壓力。從圖中可以看出,液壓缸壓力在車輛爆胎后可以及時響應,從而可以實現將液壓泵的動力傳遞到活塞桿上的功能,從而本裝置可以實現車輛爆胎后車架車橋之間距離的調節功能。
5.3 車輛爆胎后系統控制過程實現
通過采用LabVIEW程序控制和應急處理裝置硬件設備相結合的方式,實現了對車輛爆胎后系統控制過程的實現。本試驗有左輪爆胎和右輪爆胎兩種模式。通過選擇不同的模式,硬件設備可以按照本裝置程序設定的步驟完成相應的伸長與縮回功能,從而實現車輛爆胎后活塞桿的相應動作。經過試驗,本裝置控制系統運行可靠,可以實現對爆胎后應急處理裝置的控制功能。
6 結論
本文通過對爆胎車輛穩定性的研究,提出了以液壓缸為主體的應急處理裝置,通過調節車橋車架間距離來保持車輛平衡。建立了應急處理裝置的動力學模型,以F-PID控制作為裝置控制過程的理論依據,設計出了危化品車輛爆胎危險應急處理裝置,繪制出了裝置設計示意圖,通過軟件仿真測試驗證了本裝置工作過程的可行性。本裝置采用液壓承重及液壓控制設計方法,結構簡單,易于實現標準化和通用化。運用多種傳感及輸出控制技術,裝置控制過程精確可靠。同時,本裝置在危化品車輛輪胎氣壓出現異常,氣壓較低時也能起到安全防護作用,防止爆胎事故的發生。目前危化品車輛還沒有安裝爆胎應急處理裝置,國內也沒有同類產品,該裝置在危化品車輛或大型車輛安全運輸中具有較好的推廣前景。
參考文獻
[1] 曹興舉.汽車在高速公路上爆胎原因及防治措施[J].交通科技與經濟,2008(02):56-57.
[2] 張放.汽車爆胎的原因及應對措施問題研究[J].汽車實用技術, 2013(10):101-104.
[3] 陳東,武楠,石能芳.爆胎車輛轉向系統與垂直載荷瞬態響應特征[J].中國公路學報,2014,27(08):112-119.
[4] Daniel Garcia-Pozuelo, Oluremi Olatunbosun,Salvatore Strano, Mario Terzo,A real-time physical model for strain-based intelligent tires[J].Sensors and Actuators A:Physical,2019.
[5] Masato Abe,Yoshio Kano,Kazuasa Suzuki,Yasuji Shibahata,Yoshimi Furukawa.Side-slip control to stabilize vehicle lateral motion by direct yaw moment[J]. JSAE Review,2001,22(4).
[6] Motoki Shino,Masao Nagai. Yaw-moment control of electric vehicle for improving handling and stability[J]. JSAE Review,2001,22(4).
[7] 于樹友,劉洋,王菲,陳虹,郭洪艷.爆胎車輛軌跡控制的仿真[J].北京工業大學學報,2016,42(08):1225-1232.
[8] 余志生.汽車理論[M].第5版.北京:機械工業出版社,2009:195.
[9] 祁步春.基于功率鍵合圖的轉閥式液壓激振器運動特性研究[D].江西理工大學,2018.
[10] 石辛民,郝整清.模糊控制及其MATLAB仿真[M].清華大學出版社,2018:125.
[11] M. Huba,I. Belai. Experimental evaluation of a DO-FPID controller with different filtering properties[J]. IFAC Proceedings Volumes, 2014,47(3).
[12] Wenjie Zeng,Qingfeng Jiang,Jinsen Xie,Tao Yu. A functional varia -ble universe fuzzy PID controller for load following operation of PWR with the multiple model[J].Annals of Nuclear Energy,2020, 140.
[13] Pan Indranil,Das Saptarshi,Gupta Amitava. Tuning of an optimal fuzzy PID controller with stochastic algorithms for networked control systems with random time delay[J]. ISA transactions,2011, 50(1).
[14] S.R.Vaishnav,Z.J.Khan. Design and Performance of PID and Fuzzy Logic Controller with Smaller Rule Set for Higher Order System[J]. Lecture Notes in Engineering and Computer Science,2007,2167(1).
[15] 石純放.懸架非線性阻尼參數對整車振動的影響分析及參數優化[D].天津大學,2017.
[16] 高翔,胡亞男.基于 Simulation X的泵控馬達調速系統建模仿真[J].液壓與氣動,2015(10) : 56-60.
[17] 龔鵬,李燈輝,劉剛,榮剛.基于Simulation X汽車起步過程離合器滑磨功仿真分析[J].機械設計,2019,36(03):105-109.
[18] 王志勇,劉凱凱,喬居斌,張愛民.基于SimulationX的電控液壓懸掛系統的仿真分析[J].機床與液壓,2018,46(15):165-168.
[19] 林春鵬,張小坤,董偉.基于Simulation X傳動系統Rattle問題分析與研究[J].汽車實用技術,2018(07):47-49.
